基于模糊灰色認知圖的復雜戰場智能態勢感知建模方法
2022-06-10 05:42:34陳軍張岳陳曉威佟龑
兵工學報 2022年5期
關鍵詞:模型
陳軍, 張岳, 陳曉威, 佟龑
(1.西北工業大學 電子信息學院, 陜西 西安 710072; 2.江蘇自動化研究所, 江蘇 連云港 222061)
0 引言
現被廣泛認可的態勢感知(SA)概念是由Endsley于1995年提出,并經過一系列討論后形成的定義——“對特定時空中態勢元素的覺察、理解以及對其未來狀態的預測”。戰場SA相當于“觀察- 判斷- 決策- 行動(OODA)”環路中的觀察和判斷環節,是指揮員認知決策和無人系統智能決策的基礎,是一種在復雜對抗環境中啟發決策活動的認知理論,如圖1所示。
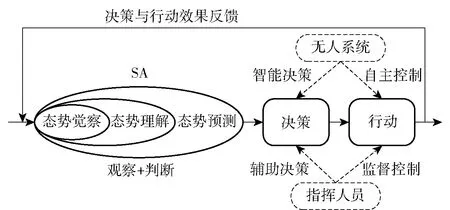
圖1 SA與決策的關系Fig.1 Relationship between SA and decision making
由于SA概念起源于對人的認知活動的研究,目前國內外SA的研究主要集中于人在任務過程中的SA理論模型、度量模型和應用模型等問題。但隨著未來無人系統在戰場中的廣泛運用,開展復雜戰場環境下的智能SA問題研究勢在必行,它將提高無人系統的智能SA水平。
近些年來,將認知工程科學、人工智能技術應用于無人系統的研究成為重要趨勢。其中,模糊認知圖(FCM)作為一種較理想的、可用于建模和模擬動態系統知識表示和決策支持的工具,其節點具有明確含義、結構具有反饋機制、容易引入學習機制等優勢使其應用范圍非常廣泛,目前已有眾多研究者將其應用于戰場SA的建模工作,以期為指揮人員或無人系統的作戰任務提供決策支持。因此,本文基于SA理論的3層次概念框架,針對現代戰場環境的動態、不確定性特點,采用FCM的擴展形式——模糊灰色認知圖(FGCM),建立戰場環境下目標SA模型,提升無人系統的決策優勢。
1 戰場智能SA建模分析
1.1 戰場SA建模分析
按照SA理論的3層次概念框架,戰場SA同樣包含了態勢元素的覺察、態勢的理解和態勢的預測3個階段。態勢覺察主要解決戰場態勢數據信息的預處理,態勢理解和態勢預測主要通過態勢數據信息的關聯和推理,獲得對當前戰場態勢的綜合評價和趨勢判斷。
目標威脅評估和意圖預測分別是戰場態勢理解和態勢預測中最重要的內容之一。在威脅評估領域,目前常用的方法有貝葉斯網絡、多屬性決策、神經網絡等。其中,貝葉斯網絡和神經網絡都屬于量化類威脅評估方法。不同的是貝葉斯網絡方法的評估結果往往以離散化的威脅等級及其概率形式呈現;神經網絡方法在有數據支撐的情況下,可以量化輸出連續的威脅值。多屬性決策方法屬于威脅排序類評估方法,以經典的逼近理想解(TOPSIS)法為例,它是通過比較有限個評價對象與理想化目標的接近程度來評價各方案的相對優劣,計算的綜合評價指標只作為排序的依據,不能量化威脅值,進而無法對單一目標進行威脅評估。在意圖預測領域,目前常用的方法有貝葉斯網絡、神經網絡、模糊推理等。其中,貝葉斯網絡和模糊推理方法需要依賴專家先驗知識構建初始模型,在有數據樣本的條件下可對模型進行優化;神經網絡方法主要采用數據驅動的建模與推理方式,在用于意圖預測時可以將目標的態勢數據和真實意圖標簽作為學習的樣本,可以在無需先驗知識的情況下達到較高的預測準確率。
由此可見,在復雜、動態、不確定戰場環境的SA建模問題中,對于貝葉斯網絡建模方法,在分布獨立這個假設成立的情況下,即使數據存在缺失、不完備等情況,貝葉斯網絡也能取得很好的建模效果。但考慮實際戰場中各態勢要素之間可能具有不同程度的關聯,不能滿足分布獨立的假設前提,如何改進和弱化獨立性假設對貝葉斯網絡建模的影響,還需要繼續探索。神經網絡建模方法在大量訓練數據支撐下可以達到很高的擬合精度且不依賴于先驗知識,但實際戰場中的數據通常難以獲得;同時由于干擾等因素,數據存在不確定、不完整的特性;另外,神經網絡隱含層節點無語義,推理過程具有“黑箱特性”,對神經網絡建模方法的實際應用產生了一定的限制。多屬性決策和模糊推理法建模過程簡單,推理速度快,但模型相對固定,在具有反饋的動態復雜系統建模上有一定困難。
因此,本文主要考慮到戰場環境的動態性和數據的不確定性,嘗試利用FGCM在表達和處理不確定數據、可解釋的因果推理機制等方面的建模特點,加入環境控制節點,改善威脅評估模型的動態適應性;同時引入學習算法減少建模中對專家先驗知識的依賴,優化模型參數,以期提高意圖預測的客觀性和準確性。戰場智能SA建模過程如圖2所示。

圖2 戰場智能SA建模過程Fig.2 Modeling process of intelligent situation awareness in the battlefield
表1所示為戰場目標SA建模內容分解與技術途徑。在態勢覺察階段,利用FGCM模型的灰數表達方式實現不同來源、不同結構態勢元素的不確定性描述和量化;在態勢理解階段,以目標威脅評估為研究對象,通過引入外部環境變量,建立能夠適應戰場環境動態變化的威脅評估動態模糊灰度認知圖(DFGCM)模型;在態勢預測階段,以目標意圖預測為研究對象,通過引入粒子群優化(PSO)算法提高模型對歷史數據的參數學習能力,減少模型對專家知識的依賴,實現知識與數據的雙驅動。
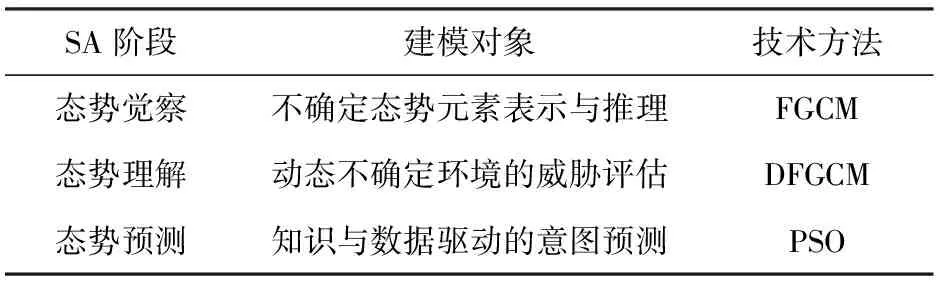
表1 戰場智能SA建模的技術方法Tab.1 Technology and method of battlefield intelligentsituation awareness modeling
1.2 FGCM建模方法

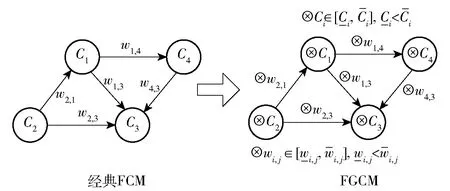
圖3 經典FCM與FGCM關系示意圖Fig.3 Schematic diagram of relationship between FCM and FGCM
灰數的不確定程度計算公式如(1)式所示:
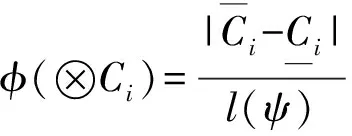
(1)

(2)
FGCM的節點狀態值推理公式如(3)式所示:

(3)
式中:表示節點前一時刻狀態值對當前狀態值的影響,取值范圍為[0,1]。
激活函數(·)主要有sigmoid型和tanh型,分別對應節點狀態值屬于[0,1]和[-1,1]兩種情況。

(4)

(5)
式中:為激活函數調節系數;灰數的加法、乘法運算法則如下:

(6)

(7)
將灰數轉化為準確值的操作過程稱為白化,白化的一般公式為

(8)
式中:為調節白化值偏向的參數,取值范圍為[0,1]。
在FGCM的實際應用中,概念節點數據的量綱各不相同,需要通過模糊化操作轉變為無量綱的模糊數。將FGCM應用于動態不確定戰場環境的SA建模問題具有以下4點優勢:
1)FGCM采用灰數形式進行推理,加強了表達和處理不確定數據的能力,并可實現不確定推理結果的量化輸出;
2)通過引入環境控制節點,構建基于DFGCM的威脅評估模型,與TOPSIS法相比,不僅能夠量化目標的威脅程度,還能在模型推理過程中響應外部環境的動態變化;
3)FGCM模型為有向有環圖,可以對貝葉斯網絡、模糊推理等方法難以表示的節點間存在關聯或具有反饋的復雜系統進行建模;
4)與神經網絡相比,可利用FGCM模型節點的語義性,基于專家先驗知識構建可解釋的意圖預測模型結構,再引入學習算法,進而在可用數據支持下確定模型參數。
2 基于DFGCM的威脅評估建模
任務想定設定為對入侵飛機目標的戰場目標SA建模,主要包含態勢覺察、威脅評估和意圖預測3個模塊。態勢覺察既受自下而上的數據信息驅動,也受到自上而下的任務驅動。
建模過程中,采用受任務驅動的態勢覺察方式,以意圖預測為最終目標,自上而下進行態勢元素的分解,指導態勢覺察模塊從戰場環境中提取相關的態勢元素,并經過不確定性表達與處理后,提供給威脅評估和意圖預測模塊。受任務驅動的自上而下態勢元素分解過程如圖4所示。
圖4 受任務驅動的自上而下態勢元素分解Fig.4 Task driven top-down decomposition of situation elements
由于與目標識別等問題不同,威脅評估具有一定的主觀性,主要是作為后續行動的依據,評估結果的有效性很難直接體現。在模型權值的確定中直接引入學習機制比較困難,故需要一定的專家經驗和知識,一般是利用多個專家知識進行加權確定初始權值。因此,本文對于威脅評估的建模主要考慮動態性特征,需要提取的態勢元素主要包括兩大類:1)與目標能力和時空關系有關的元素,如目標機動能力、隱身能力等,作為模型的概念節點;2)反映動態戰場環境的元素,如地形、氣象、敵方支援、電子干擾等自然因素和人為因素,作為模型的外部控制節點。
基于態勢元素分解確定的概念節點及其因果關系,構建基于FGCM的目標威脅評估模型;分析外部控制節點對概念節點之間因果關系的影響情況,確定與FGCM關聯權值?,的動態函數,使模型推理適應動態變化的戰場環境。圖5所示為基于DFGCM的目標威脅模型,圖5中威脅評估DFGCM模型的節點定義如表2所示。
圖5 基于DFGCM的威脅評估模型Fig.5 Threat assessment model based on DFGCM
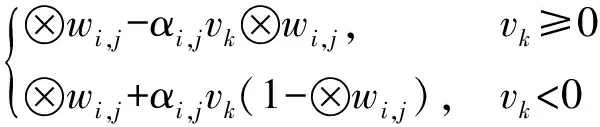
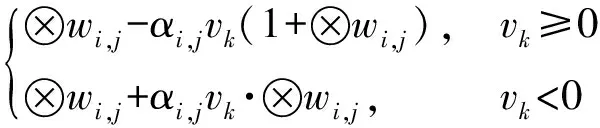
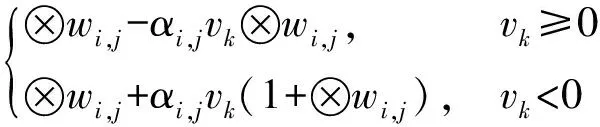
威脅評估模型在推理過程中,權值可根據外部控制節點的狀態動態調整,如(9)式~(12)式所示,權值的調整受其初始值和環境影響關系的共同作用。
當?,為正值,因果關系受影響增強時:
(9)
當?,為正值,因果關系受影響減弱時:
(10)
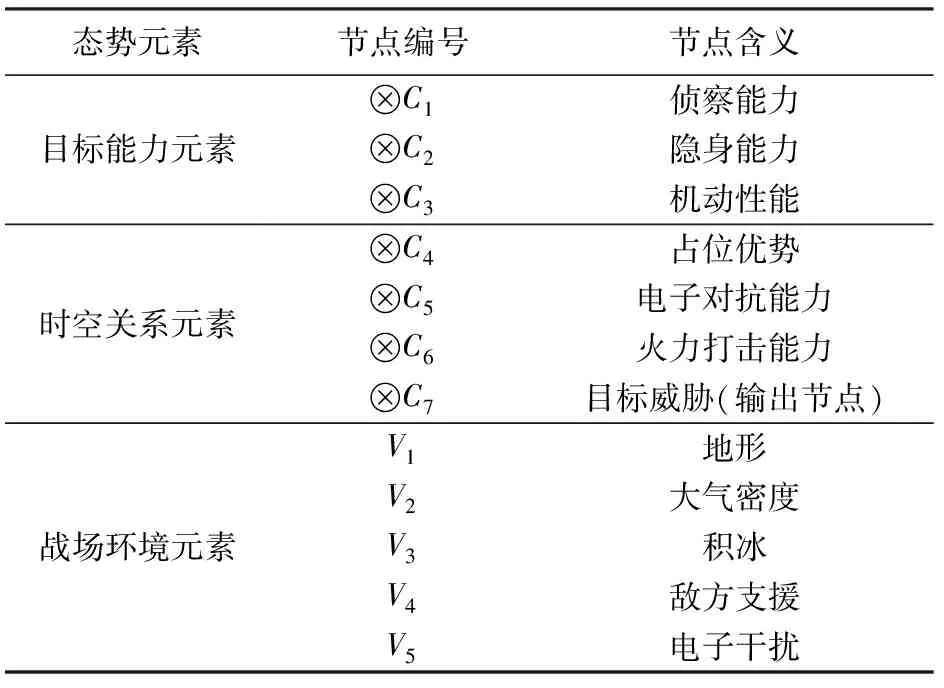
表2 威脅評估DFGCM模型的節點含義Tab.2 Node meaning of threat assessment DFGCM model
當?,為負值,因果關系受影響增強時:
(11)
當?,為負值,因果關系受影響減弱時:
(12)
式中:表示第個外部控制節點的狀態值;,為調節系數,取值范圍為[-1,1],它決定了動態調節的力度和方向。當多個控制節點同時對一個權值?,起作用時,只選取使該權值變化最大的。
DFGCM模型的輸出為灰數,即區間數的表達方式。為了進行有效的排序,需要進行白化。考慮到模型輸出具有的不確定性越大,表示我方對目標掌握的信息和情報越少,敵方對我方的威脅越接近推理結果的上限。因此白化公式(8)式中參數的確定按照(13)式進行:
(13)
式中:(?)表示節點?根據(1)式計算出的灰度。
3 基于FGCM的意圖預測建模與學習算法
目標意圖預測模型的概念節點來自態勢覺察模塊分解的態勢元素,同時包含了威脅評估模塊輸出的目標威脅程度信息。表3所示為意圖預測FGCM模型的節點定義。
分析各概念節點之間的因果關系,可以構建意圖預測FGCM模型,如圖6所示。入侵目標飛機的作戰意圖節點(?)包括攻擊、偵察、掩護和其他4種類型,通過對輸出節點?狀態值的白化后,根據閾值判斷具體意圖類型,其中、、為4種意圖的分類閾值。
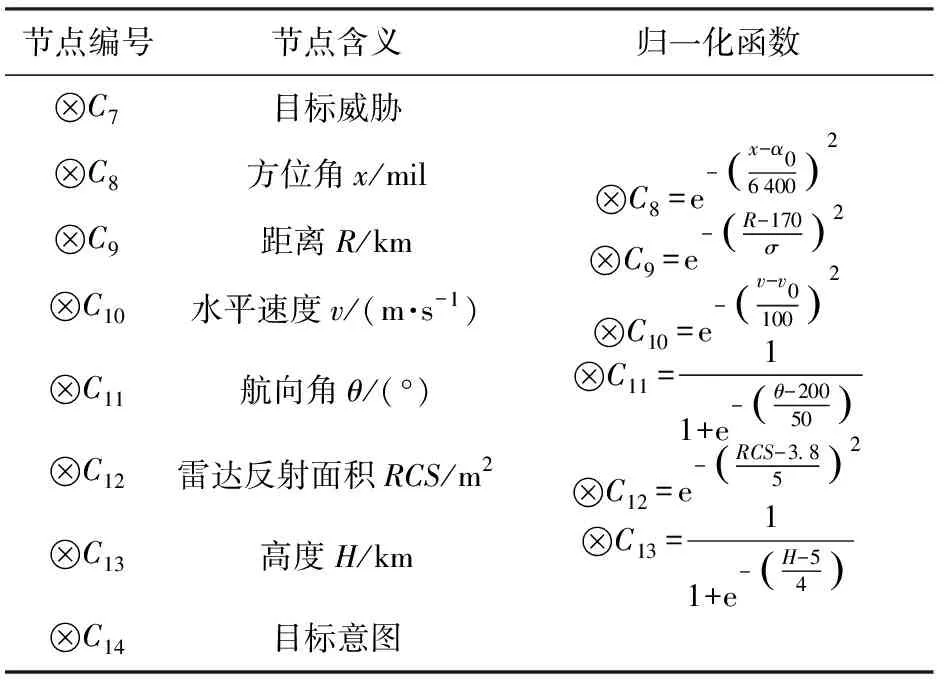
表3 意圖預測FGCM模型的節點定義Tab.3 Node definition of intention prediction FGCM model
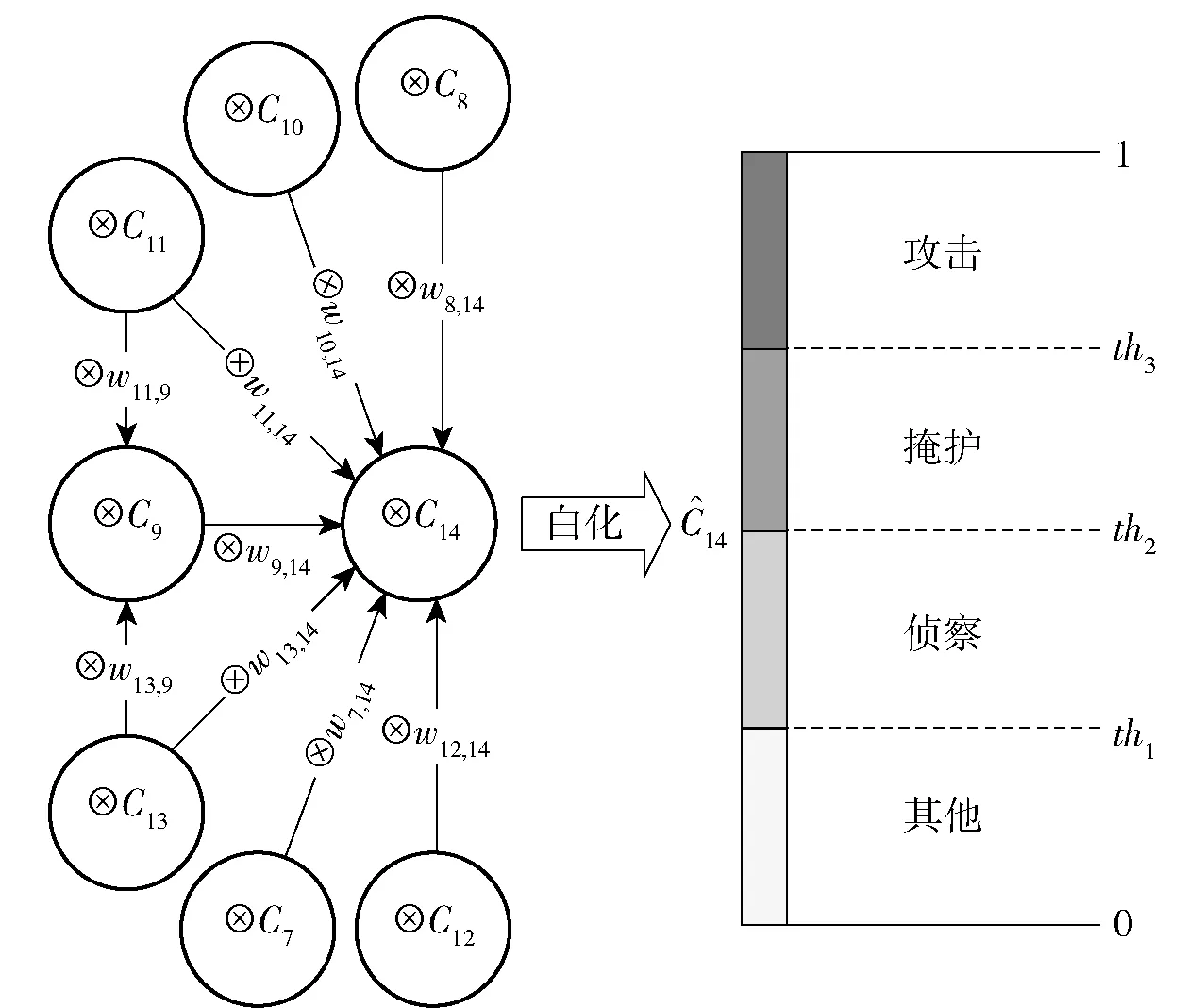
圖6 基于FGCM的意圖預測模型Fig.6 Intention prediction model based on FGCM
由于實際戰場SA中的目標意圖類型有限,意圖預測問題可以歸結為分類問題,與威脅評估不同的是目標意圖是客觀的,不同戰術意圖下所表現出的態勢元素特征也不同。在有數據支撐的條件下,可將目標真實意圖作為標簽,引入學習算法確定權重,可以避免過度依賴專家知識,并提高目標意圖預測的客觀性、準確性,也符合智能戰場SA的發展趨勢。
本文引入種群學習算法中常用的PSO算法,學習和調整意圖預測FGCM模型的關聯權值。PSO算法中的個體由圖6模型中的非零權值組成,其中非零權值有9個,每個灰數權值由上、下限值組成,因此個體編碼長度為18位,如圖7所示。由FGCM的定義,在種群初始化和迭代過程中,上限值要大于或等于下限值,且在[-1,1]范圍內。
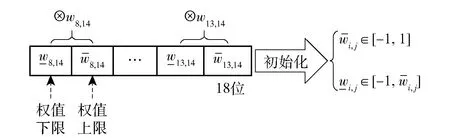
圖7 個體編碼及其初始化Fig.7 Individual coding and its initialization
經過編碼后,種群中每個個體就是一組權重值,評價一組權重值的優劣,需要設計適應度函數。適應度函數設置為訓練數據的分類準確率,
=
(14)
式中:為相應權值在訓練數據下推理正確的個數;為訓練數據的總組數。因此,本文PSO算法中每一個個體,就是意圖預測FGCM模型中的一組權重,適應度函數就是用來評價個體優劣(即接近理想權重的程度)的標準,對于每一個個體,將其代表的權重代入模型,然后根據一組訓練數據中的輸入節點?~?推理出輸出節點?的值并進行白化,根據白化值和圖6中的閾值~判斷是否分類正確,根據(14)式計算出每一個個體代表的權重在26組訓練數據下的分類準確率,作為其個體適應度。個體適應度越大,表明該個體代表的權重推理出的分類準確率越高,該個體越優,后續種群的更新就要不斷向個體適應度更高的個體靠近,取尋找最理想的權重矩陣。同時,由于推理結果?是一個灰數,分類結果由此灰數值白化后得到,推理結果的灰數不應包含太大的不確定度。因此,判斷個體的優劣時還要考慮輸出節點的不確定性,選擇推理結果不確定性更小的個體作為更優個體。故將訓練數據下輸出節點?的平均不確定度作為判斷個體優劣的第2個指標:
(15)
式中:(?)為由第組訓練數據推理出的節點?的不確定度,其計算方法在12節已經給出。
綜上所述可知,評價個體優劣時,先計算其適應度函數,適應度函數更大的個體更接近最優解;當兩個個體適應度函數相同時,再計算節點?的平均不確定度,取平均不確定度更小的個體為更優個體。隨著迭代的進行,準確率高、平均不確定度小的個體得以保留,最終找到一個和都令人滿意的全局最優解作為權重矩陣的學習結果。
PSO算法中,種群的更新根據以下2個公式進行:

(16)
(17)

對種群中每個粒子都用(16)式、(17)式進行更新,隨著迭代步數的增加,整個種群不斷地向全局最優解靠近,最終找到令人滿意的解。PSO算法的流程如圖8所示。
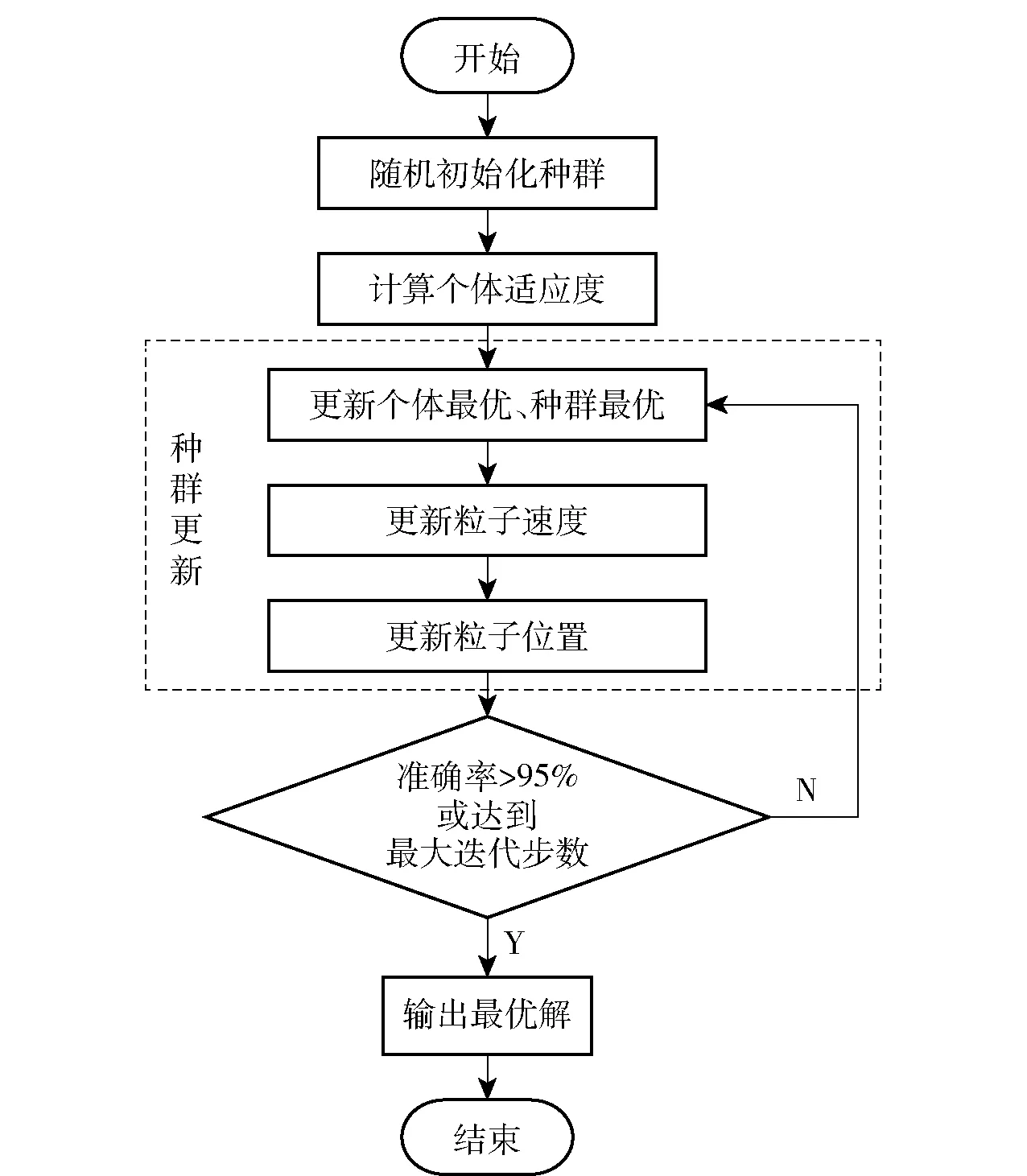
圖8 PSO算法流程圖Fig.8 Flow chart of PSO algorithm
4 仿真驗證
4.1 威脅評估模型仿真驗證與分析
411 模型動態適應性驗證
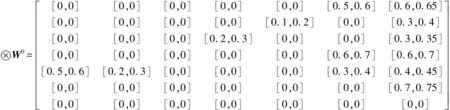
威脅評估模型中的初始權重采用多專家加權確定,專家可以先給出一個模糊數作為灰數的中心,隨后給出不確定性的大小,匯總時按照專家的專業程度、經驗年限等因素,加權求權重的均值,分別加權確定灰數的中心數和不確定度。需要注意的是,灰數的上下限要在[-1,1]區間內。最終確定初始關聯權值矩陣為
為確定(9)式~(12)式中調節系數的最佳取值,并驗證模型在復雜多變的外部環境中的動態適應能力,設置5組不同的戰場環境條件,分別發生在~時刻,設置1組最具代表性的輸入?={?~?},如表4所示。5組時刻的外部環境有相對優劣,通過常識可知環境條件越惡劣,越不利于敵方目標飛機入侵,即敵方目標的威脅程度越低。
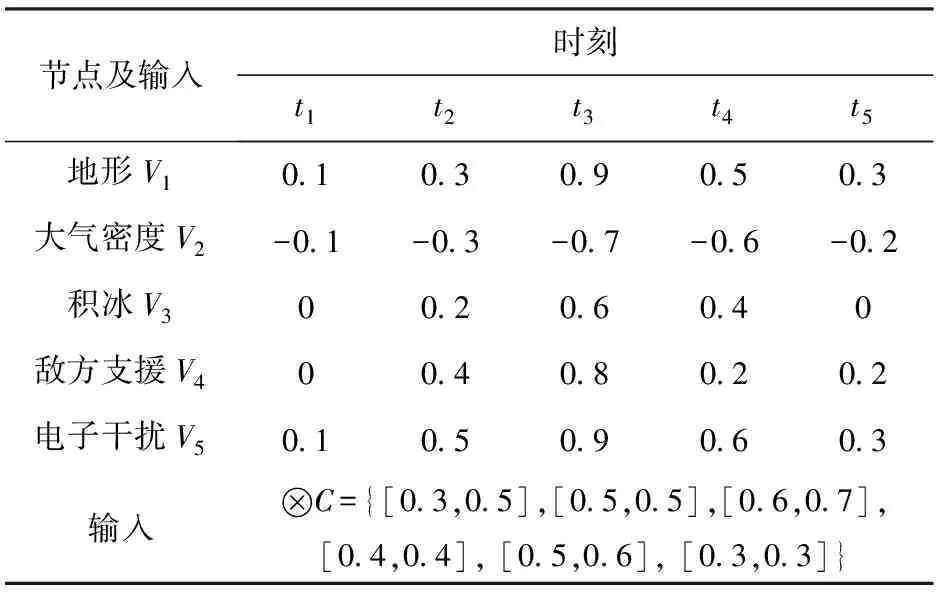
表4 不同時刻的節點值設定Tab.4 Vk value setting at different time
先將輸入?={?~?}和、時刻的值代入模型,依次將權重調節系數,設置為02、04、06和08,記錄模型推理結果?的不確定度和白化值,如圖9所示。
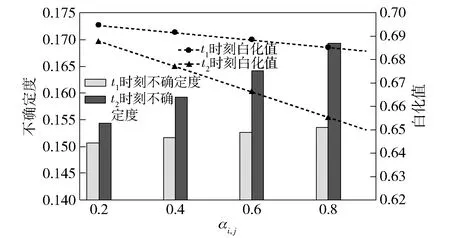
圖9 不同時刻和調節系數下推理結果對比Fig.9 Comparison of reasoning results in the case of different times and adjustment coefficients
由于時刻的環境更加復雜,外部控制節點的絕對值更大。由圖9可以看出:外部環境越復雜,權重調節系數,對輸出結果的影響越明顯;,越大,模型對環境變化的敏感度越高,動態適應性越強;隨著模型動態適應性的提高,推理結果的不確定性也在增加,故在權重調節系數的選取上要權衡模型的動態適應力和推理結果的不確定性。
由權重調整規則可知,當多個控制節點同時對一個權值?,起作用時,只選取使該權值變化最大的。為兼顧模型對環境的動態適應性和盡可能小的不確定性,可以根據專家知識對環境節點重要性的判斷,為更重要的外部控制節點設置更大的權重調節系數,,在該原則基礎上經過多次仿真,最終確定權重調節系數如表5所示。
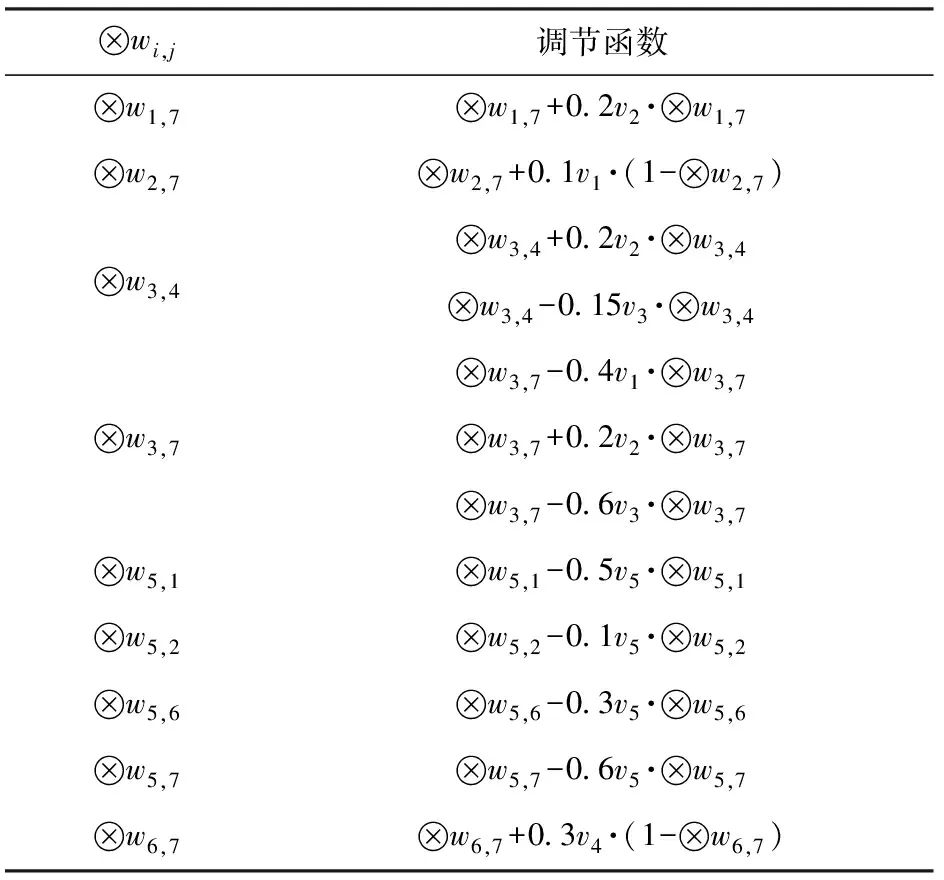
表5 權值調節系數Tab.5 Weight adjustment coefficient
采用最終確定的調節系數來驗證模型的動態適應性,在同一組輸入?={?,…,?}下分別代入~的外部環境變量,得到輸出節點?的不確定性和白化值如圖10所示。由圖10可以看出,對于同一組輸入,模型在不同時刻下的輸出不確定性和白化值都有所變化,威脅評估的結果也符合“環境越惡劣,敵方飛機目標入侵難度越大,威脅越低”的規律。
412 模型有效性驗證
為了驗證威脅評估模型的動態不確定性推理能力,在時刻下設置5組輸入,如表6所示。
第1組輸入的每個節點的灰度都為0,即第1組數據節點值都是精確值,用一組上下限相等的灰數表示;第2組中只有一個具有不確定性輸入的節點?,且灰度為02;第3組中有3個節點的輸入具有不確定性;第4組輸入與第3組類似,但節點?的灰度為1,表示目標偵察能力數據缺失,模擬不完備信息下的威脅評估。第5組與第3組對比,用灰數表示另外3個屬性。5組數據基本涵蓋了各種類型目標屬性的情況,根據表6定性分析可知:
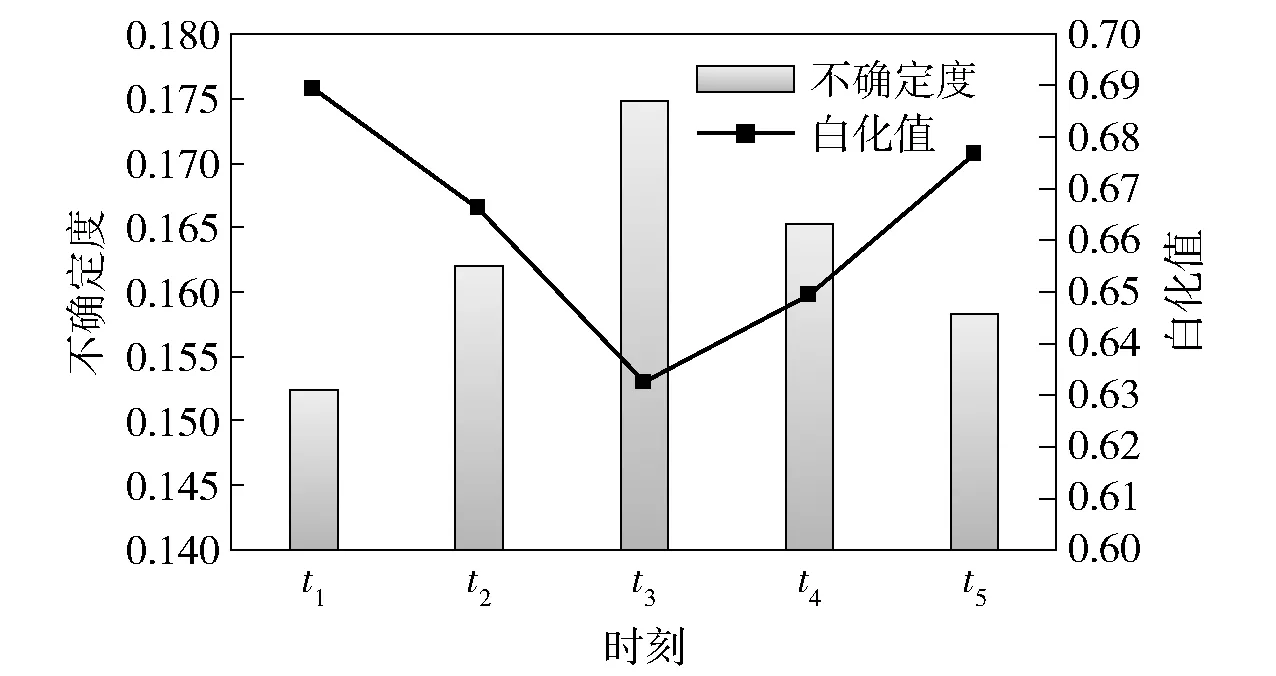
圖10 不同時刻模型輸出對比Fig.10 Comparison of model outputs at different times
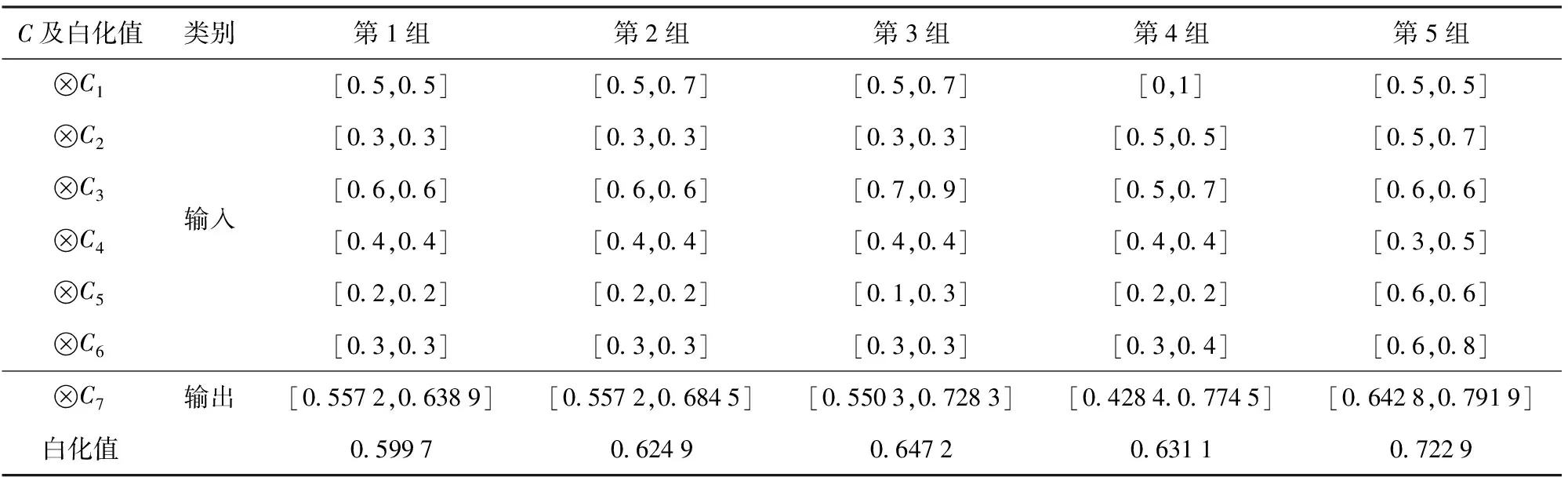
表6 不同時刻具有不同不確定性的輸入與模型輸出Tab.6 Input and output of model with different uncertainties at different times
1)第1組~第4組目標各項參數相差不大,但數據的不確定度逐漸增加,分析可知威脅評估的白化結果應該大致相等且不確定性程度排序為:第1組<第2組<第3組<第4組。
2)第4組數據目標屬性?的灰度為1,推理結果的不確定度應該為5組數據中最大。
3)比較第3組和第5組,由于第5組的目標能力參數整體比第3組高,經過白化后的第5組的目標威脅程度應當大于第3組。
5組仿真數據的威脅評估仿真驗證結果如圖11所示。灰色色塊長度代表模型評估得到的目標威脅程度的灰度,數字分別為威脅程度的上、下限值。
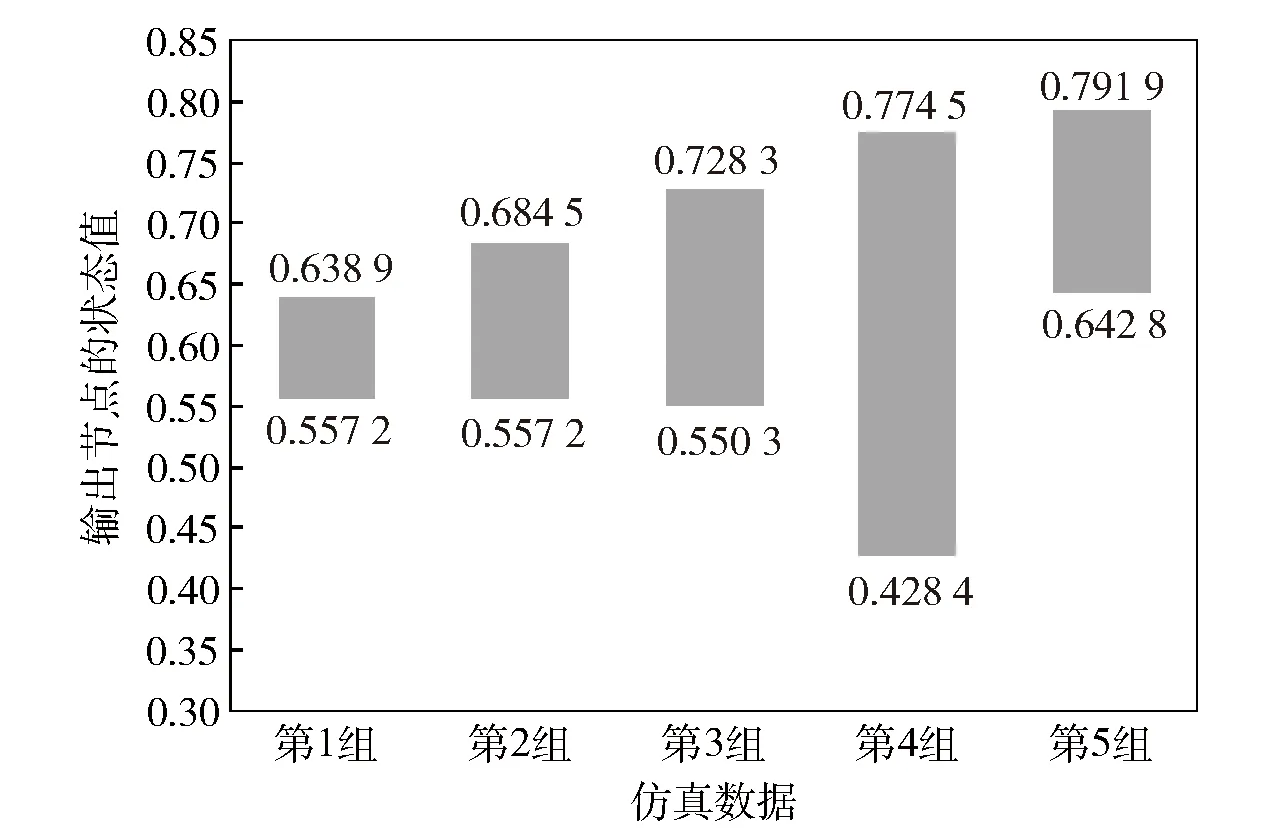
圖11 基于DFGCM的威脅評估仿真結果Fig.11 Simulated results of threat assessment based on DFGCM
表6和圖11表明:
1)前3組數據的評估結果白化值大致相等,但不確定度依次增加,符合預期效果。
2)即使第4組仿真數據中對評估敵方威脅程度的探測能力參數完全未知,威脅評估模型仍能輸出較為合理的結果,但結果的不確定性會較大。
3)第3組和第5組的評估結果白化后的區分度明顯,可用于比較不同目標的威脅程度。
綜合來看,基于DFGCM的目標威脅評估模型有效且具備動態適應能力,能夠對不同戰場環境下的不同目標進行較為合理的威脅評估。
為進一步驗證DFGCM模型評估的有效性和可信性,對于表6中的5組數據,采用比較成熟的TOPSIS法進行評估。由于TOPSIS法處理的是精確值,評估之前需要對表6中的灰數進行處理,分別采取3種方法對灰數進行處理:取灰數的下限、取灰數的上限、取灰數的白化值。例如,對于第2組數據的?=[0.5,0.7],3種方法對其處理后的精確值分別為0.5、0.7、0.61(白化結果保留兩位小數),將表6中的數據處理之后作為歸一化后的決策矩陣。由于TOPSIS法不考慮屬性之間的相互影響,每個屬性有對應的權重,與本文方法不同的是TOPSIS法各屬性的權重之和為1,只保留圖5模型中屬性節點?~?指向輸出節點?的權重?~?進行白化,并用(18)式進行歸一化,得到6個屬性的相對權重:
(18)
得到決策矩陣和權重之后分別計算正、負理想解并計算綜合評價值,3種灰數處理方式下的綜合評價值如表7所示(結果保留4位小數)。
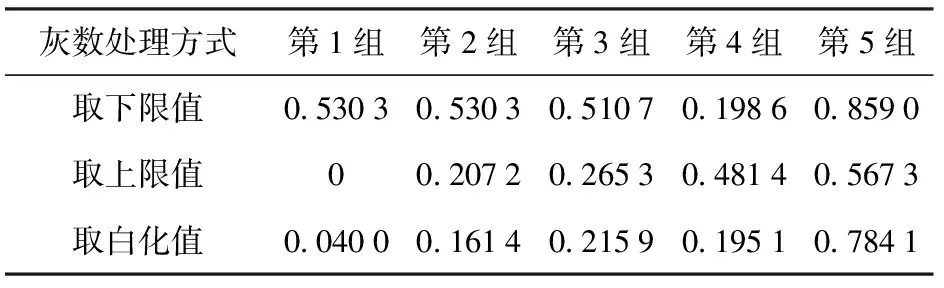
表7 TOPSIS法評估結果對比Tab.7 Comparison of TOPSIS evaluated results
由表7可以看出對灰數采取的處理方式不同,最終的評估結果相差較大:1)取灰數下限值時,前3組數據得到的綜合評價值很接近;2)取灰數上限值時,第1組數據由于各項指標都為5組數據中最小,因此綜合評價值為0,5組數據不管是綜合評價值還是其排序,都與取灰數下限的處理方法相差較大,表明采用TOPSIS法評價時,對于灰數的處理不宜簡單地取其上限值或者下限值;3)將灰數白化后再用TOPSIS法進行評估,可以看出數據有了明顯的區分度,威脅排序的結果為:第1組<第2組<第4組<第3組<第5組。
由此可見,基于DFGCM的威脅評估推理結果白化值的排序與TOPSIS法的排序結果一致,側面再次驗證了威脅評估DFGCM模型的有效性。與TOPSIS法不同的是,DFGCM模型考慮了節點之間的相互影響,更關注動態、不確定性環境下威脅值的量化,在目標參數不準確或缺失情況下仍能進行有效評估;TOPSIS法更關注不同目標威脅程度的排序,得到的綜合評價值僅作為判斷相對大小的依據,對于單個目標無法進行威脅值的量化評估。
4.2 目標意圖預測模型仿真驗證與分析
采用《2015年全國研究生數學建模競賽A題》和文獻[34]提供的目標意圖預測樣本數據,構建包含41組數據的學習樣本庫,如表8所示。使用PSO算法對其中的26組數據樣本進行學習,其余15組數據樣本經過不確定性處理后用于測試驗證。由于FGCM模型處理的數據為灰數,對于表8中的精確數,將其歸一化后擴展為上、下限相等的灰數形式,再與灰數形式的權值一起參與推理運算。例如,某組數據的某一項參數歸一化后為0.6,則擴展為灰數形式的[0.6,0.6],再根據(6)式和(7)式的灰數運算法則參與運算。根據(6)式和(7)式進行灰數(區間數)的加法和乘法運算示例如下:
[0.3,0.5]+[0.6,0.6]=
[0.3+0.6,0.5+0.6]=[0.9,1.1];
[0.3,0.6]×[0.6,0.6]=
[min (0.3×0.6,0.3×0.6,0.6×0.6,0.6×0.6),
max (0.3×0.6,0.3×0.6,0.6×0.6,0.6×0.6)]=
[min (0.18,0.18,0.36,0.36),
max (0.18,0.18,0.36,0.36)]=
[0.18,0.36]
FGCM推理公式(3)式中的矩陣乘法根據上述法則進行運算,得到新的節點灰數值之后用sigmoid函數歸一化到[0,1]之間,進而參與后續運算。
4.2.1 模型不確定性推理能力驗證
為驗證學習算法的有效性和模型不確定性推理能力,按第3節設計的PSO算法學習權重矩陣,將學習得到的FGCM模型用于后續的仿真驗證。對于樣本的學習,PSO算法的步驟如下:

將威脅值和歸一化之后的各項數據賦值給對應的節點?~?;分別將種群中每個個體賦值給權重矩陣。
用(3)式的FGCM推理公式,分別計算每個權重矩陣在26組訓練數據下輸出節點?的值,并用(8)式、(13)式進行白化。
表8 目標意圖預測模型學習數據樣本庫Tab.8 Learning data sample database of target intention prediction model
根據白化值和圖6中的閾值~判斷是否分類正確,根據(14)式計算每個權重矩陣下26組數據意圖識別的準確率;根據(15)式計算每個權重矩陣下26組數據輸出結果的平均不確定度。
選擇準確率高、平均不確定度小的權重矩陣作為當前最優個體,根據(17)式、(18)式對個體進行更新,形成新的種群。
得到更新后的種群后轉到步驟2,循環執行步驟2~步驟6,直到滿足終止迭代條件。
設置種群大小為500,PSO算法的慣性因子取為1,學習因子取為2,為防止粒子更新步長過大,設置粒子最大速度為0.1。設置終止條件為分類準確率達到95%以上或達到最大迭代步數10 000步。在學習過程中,對于超出限定范圍的個體進行重新初始化。
仿真結果表明,26組訓練數據的分類準確率為96.15%,模型推理結果的平均灰度為0.60。為了直觀地表現學習結果,將目標意圖預測FGCM模型的權值可視化,如圖12所示。圖12中,箭頭的粗細代表關聯權值白化后絕對值的大小,箭頭越粗,表示關聯權值越大;箭頭的顏色表示關聯權值的灰度,顏色越深,表示該關聯權值的灰度越小;箭頭的虛實表示灰數權值白化后的符號,實線表示正值,虛線表示負值。
圖12 PSO算法的學習結果Fig.12 Learning result of PSO algorithm
訓練完成的模型在15組數據的測試集上準確率為93.33%,為了驗證模型的不確定性推理能力,模擬真實情況下目標某些數據缺失或不準確的情況,分別對測試集中歸一化后的目標參數做一定程度的不確定性處理。例如,某組數據中目標的水平速度經過歸一化后為0.6,表示為灰數形式為[0.6,0.6],對其進行單側灰度為10%的不確定性處理,即對灰數下限減小10%,上限增加10%,處理結果為[0.54,0.66],將此作為目標參數輸入FGCM模型進行推理,驗證是否預測準確。分別對測試集數據中節點?、?、?做10%、20%、30%、40%的不確定性處理后輸入意圖預測FGCM模型,統計測試集上的準確率如圖13所示。
圖13 不確定性數據下模型預測能力Fig.13 Model prediction ability for uncertain data
由圖13可以看出對節點進行不確定性處理,測試集上的預測準確率會受到一定程度的影響:
1)隨著不同節點不確定性的增加,模型整體的預測準確率呈下降趨勢。但當節點不確定性較小(10%,20%)時,仍能取得較高的預測準確率,即模型具備一定的不確定性處理能力,符合設計預期。
2)節點?和?的不確定性大到一定程度,預測準確率下降明顯,而節點?的不確定性對預測準確率影響不大。結合圖12中的學習結果可以發現,節點不確定性對預測準確率的影響程度,與其對應的權值大小相關。
綜上分析可知,意圖預測FGCM模型允許目標參數存在一定的不確定性,在無法獲得目標某項準確參數時,意圖預測的結果仍然具有較高的參考價值。
4.2.2 模型預測準確率對比
將本文FGCM模型結合PSO算法(FGCM模型+PSO算法)的意圖預測方法與文獻[28]中基于神經網絡模型和Adam算法(神經網絡模型+Adam算法)的意圖預測方法進行對比分析。依據文獻[28]中的方法設置神經網絡模型的結構為輸入層7個節點,隱含層32個節點,輸出層4個節點,采用交叉熵作為誤差函數,學習算法采用Adam算法,其各參數設置與文獻[28]保持一致,同樣使用本文中的訓練集和測試集,經過8 000步學習之后,意圖預測準確率對比情況如圖14所示。
圖14 意圖預測準確率對比Fig.14 Comparison of intention prediction accuracies
由圖14可以看出,神經網絡模型+Adam算法的方法在訓練集表現非常好,預測準確率達到100%,而測試集的準確率有了明顯下降,為86.67%。這種現象一般被稱為過擬合,即把訓練樣本自身的一些特點當作了所有潛在樣本都會具有的一般性質,導致模型的泛化性能下降。過擬合越嚴重,學習得到的模型在面對新的樣本時表現越差。
圖14中兩種方法都存在一定的過擬合現象,但可以發現:
1) FGCM模型+PSO算法在訓練集預測準確率上相對較低,但測試集準確率高于神經網絡模型+Adam算法;
2) FGCM模型+PSO算法的訓練集預測準確率和測試集準確率之間的差小于神經網絡+Adam,表明FGCM模型+PSO算法可以在一定程度上降低過擬合現象。
綜合分析本文目標意圖預測方法與基于神經網絡的方法的特點如下:
1) FGCM模型綜合了灰數理論,將權值設置為灰數,使得模型在無法獲得目標屬性精確數值的情況下可以進行推理,模型輸出結果包含的不確定度能從側面反映意圖預測的好壞,模型結構的確定也可以利用一定程度的先驗知識;
2) PSO算法能夠得到預測準確率和泛化能力都不錯的權值參數,但作為種群演化類算法,由于需要一定規模的個體并行求解,其學習過程對計算機性能要求更高,學習時間也更長;
3)神經網絡在數據都轉換為精確值的情況下可以達到非常高的訓練精度,且基于梯度下降原理的Adam模型能夠在很短的時間內完成8 000步的學習,模型在測試集上也有不錯的預測準確率,但過擬合現象相對嚴重一些。正如前文所述,神經網絡在有大量數據支撐的情況下可以達到很高的擬合精度,適應于數據準確且容易獲得的場景,對于不確定數據的處理能力較弱。另外,由于神經網絡隱含層節點無明確含義,隱含層的層數和節點數的確定需要通過不斷仿真進行試探,以達到最好的預測效果。
5 結論
本文基于態勢覺察、態勢理解和態勢預測3層SA建模框架,提出了自上而下任務驅動方式的態勢覺察建模思路,以目標威脅評估和意圖預測為重點研究對象開展了態勢理解和態勢預測的建模工作。得出主要結論如下:
1) 威脅評估DFGCM模型能夠適應動態、復雜的戰場環境,威脅排序結果與經典的TOPSIS法一致,且能夠在態勢元素不準確或丟失的情況下對單一目標進行合理的威脅量化評估。
2) 基于FGCM模型+PSO算法的目標意圖預測模型取得了理想的訓練和測試準確率,與基于神經網絡的模型相比,FGCM模型+PSO算法的意圖預測模型在防止過擬合方面有更好的表現。
需要指出的是,本文為便于建模工作的開展,特定選擇了態勢理解層和態勢預測層中最受關注的威脅評估和目標意圖預測兩個問題開展了建模方法的研究,可為同行提供學術啟發和方法參考。由于研究內容相對具體,本文所提出的建模方法在通用性和適用面上相對有限,如何將其擴展并應用到更大范圍的指揮控制層面,還需要在后續工作中進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
