基于參數(shù)智能化采集的盾構(gòu)管片自動選型算法研究
2022-06-08 00:39:44熊棟棟陳少林賀創(chuàng)波
隧道建設(shè)(中英文) 2022年5期
楊 釗, 熊棟棟, *, 許 超, 陳少林, 賀創(chuàng)波
(1. 中交第二航務(wù)工程局有限公司, 湖北 武漢 430040; 2. 交通運輸行業(yè)交通基礎(chǔ)設(shè)施智能制造技術(shù)研發(fā)中心, 湖北 武漢 430040; 3. 長大橋梁建設(shè)施工技術(shù)交通行業(yè)重點實驗室, 湖北 武漢 430040; 4. 中交二航局成都城市建設(shè)工程有限公司, 四川 成都 610218)
0 引言
采用盾構(gòu)施工隧道的目的是利用襯砌管片建設(shè)一條穩(wěn)定、平滑、質(zhì)量良好的隧道,盾構(gòu)施工中,隧道建環(huán)與盾構(gòu)掘進同等重要,管片選型是隧道建環(huán)的關(guān)鍵指導(dǎo)依據(jù)。
當(dāng)前,通用楔形環(huán)管片已成為最主流的盾構(gòu)隧道管片類型。現(xiàn)場管片選型主要依靠人工完成,存在人員素質(zhì)和施工經(jīng)驗參差不齊、選型理念缺乏連貫性、標準及限定條件缺乏統(tǒng)一、過于依賴決策者經(jīng)驗、缺乏定量計算支撐等問題,導(dǎo)致管片選型施工不合理、不規(guī)范等現(xiàn)象時有發(fā)生,給盾構(gòu)姿態(tài)和成型管片質(zhì)量埋下巨大隱患。為此,開發(fā)并應(yīng)用管片自動選型軟件規(guī)范或代替人工管片選型顯得尤為必要。
國內(nèi),針對管片點位選擇算法的研究主要集中在管片排版計算方法[1-6],對施工階段的當(dāng)前環(huán)管片選型指導(dǎo)意義不大。潘國榮等[7]、宋成輝[8]通過一定算法計算擬拼裝管片與設(shè)計軸線之間的距離,選出距離最小的拼裝點位,通常沒有考慮施工因素或考慮不全,同時,其合理性必須建立在精確的成型管片姿態(tài)實時測量的基礎(chǔ)上,該技術(shù)尚未得到有效普及。閆靜茹等[9]提出綜合考慮多種施工因素的通用環(huán)管片點位計算方法,但每環(huán)管片選型前人工輸入?yún)?shù)較多,需要選型人員根據(jù)實際施工情況進行權(quán)重分配,這無疑增加了現(xiàn)場人員負擔(dān),管片選型結(jié)果合理與否也受到操作人員經(jīng)驗制約。廣州某公司開發(fā)通用管片選型程序,綜合考慮了多種施工因素進行當(dāng)前環(huán)管片選型,并提供未來1~5環(huán)管片預(yù)測,但是算法對于施工中一些特殊情況考慮不夠充分,在盾構(gòu)姿態(tài)太差等情況下無法進行正常的管片選型。
在前人研究的基礎(chǔ)上,基于盾構(gòu)掘進軸線擬合設(shè)計軸線,管片拼裝軸線通過擬合盾構(gòu)掘進軸線來達到最優(yōu)化擬合設(shè)計軸線的原理,提出綜合考慮盾尾間隙、推進油缸行程差和盾構(gòu)趨勢的管片選型運算和決策算法,預(yù)先考慮了各影響因素實際施工中所有可能出現(xiàn)的取值范圍,以及各影響因素在不同取值范圍、不同施工工況下的權(quán)重變化,開發(fā)8組盾尾間隙和6組油缸行程的算法,借助盾尾間隙智能化測量和屏幕參數(shù)圖像識別技術(shù)實現(xiàn)管片選型參數(shù)的自動導(dǎo)入和通用型管片當(dāng)前環(huán)選型的全自動化。
1 管片點位自動選型基本算法
1.1 管片自動選型系統(tǒng)架構(gòu)
由于成型管片隧道依附于盾構(gòu)開挖隧道,且管片拼裝須在盾尾內(nèi)部完成,因此,成型隧道能否擬合設(shè)計軸線主要由盾構(gòu)的掘進姿態(tài)決定。實際施工中,成型隧道軸線滿足對盾構(gòu)掘進軸線的擬合,即可為盾構(gòu)掘進提供良好的后部支撐,進而保障盾構(gòu)掘進姿態(tài)質(zhì)量,成型隧道軸線與設(shè)計軸線的擬合也就水到渠成;反之,管片選型時越過盾構(gòu)掘進軸線而直接令管片軸線擬合設(shè)計軸線,反而容易造成管片姿態(tài)與盾構(gòu)姿態(tài)的不匹配,嚴重影響盾構(gòu)掘進軸線控制和成型隧道質(zhì)量。鑒于此,本系統(tǒng)管片選型算法以管片隧道軸線擬合盾構(gòu)掘進軸線為主要原則,通過考慮盾尾間隙和油缸行程差來保障成型隧道與盾構(gòu)姿態(tài)良好的匹配度,在此基礎(chǔ)上考慮盾構(gòu)趨勢,利用管片選型來適當(dāng)優(yōu)化盾構(gòu)掘進姿態(tài),暫未考慮成型隧道軸線相對設(shè)計軸線偏差的因素。經(jīng)過多個項目驗證,該算法能夠滿足通用型管片當(dāng)前環(huán)選型的需求,可較好地指導(dǎo)現(xiàn)場管片選型作業(yè)。
本系統(tǒng)主要由數(shù)據(jù)錄入模塊、數(shù)據(jù)計算模塊以及選型決策模塊構(gòu)成,如圖1所示。數(shù)據(jù)錄入模塊運用自研的盾尾間隙智能化監(jiān)測系統(tǒng)和監(jiān)控屏幕參數(shù)識別模塊自動導(dǎo)入盾尾間隙、推進油缸行程、盾構(gòu)趨勢等數(shù)據(jù);數(shù)據(jù)計算模塊基于錄入?yún)?shù)對所有待選點位進行窮舉計算;管片選型決策模塊根據(jù)計算結(jié)果自動進行權(quán)重賦值,根據(jù)綜合得分選出最優(yōu)拼裝點位。
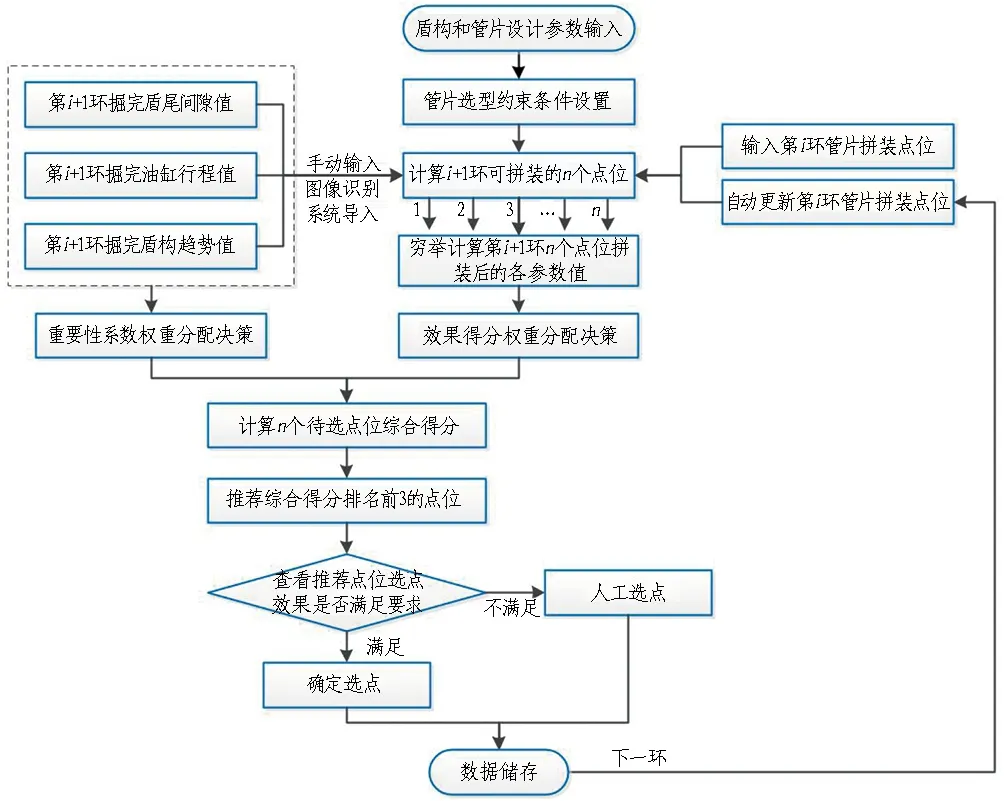
圖1 管片自動選型系統(tǒng)架構(gòu)
1.2 計算模塊
為適應(yīng)大直徑盾構(gòu)的特點和精細化管控要求(大直徑盾構(gòu)推進油缸分區(qū)多為6分區(qū),盾尾間隙測量在8組或8組以上),相比現(xiàn)有支持4組盾尾間隙值和推進油缸行程算法的軟件,本系統(tǒng)首次推導(dǎo)并采用了8組盾尾間隙和6組油缸行程的管片選型計算公式、算法邏輯。
1.2.1 通縫計算
進行下一環(huán)管片選型計算之前,需要根據(jù)錯縫拼裝的原則,結(jié)合當(dāng)前環(huán)管片點位確定下一環(huán)管片的所有滿足錯縫拼裝要求的待選點位。已知當(dāng)前環(huán)的點位為m,則下一環(huán)可選點位為
K=m+2+3n(n=0, 1, 2,…)。
1.2.2 油缸行程差計算
如圖2所示,推進油缸行程差的存在導(dǎo)致管環(huán)方向與盾構(gòu)方向產(chǎn)生夾角,通過管環(huán)合理選型來平衡推進油缸的行程差,進而達到調(diào)整管環(huán)方向、更好地使管片姿態(tài)跟隨盾體姿態(tài)的目的。
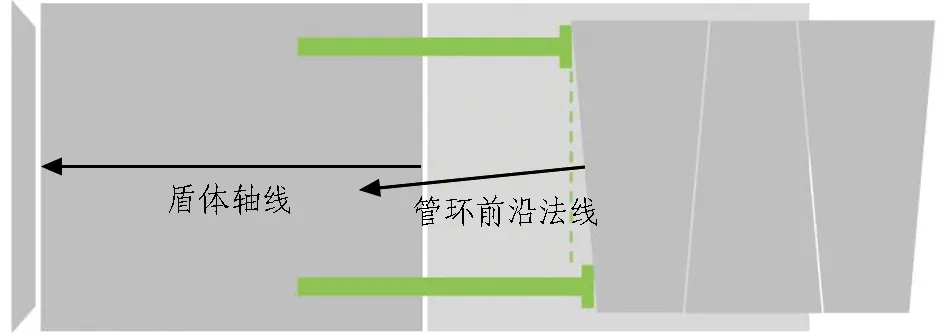
圖2 油缸行程差與管環(huán)方向和盾體方向的關(guān)系圖
油缸行程差投影如圖3所示。
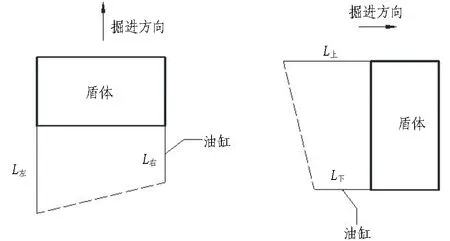
圖3 油缸行程差投影圖
設(shè)管片拼裝前油缸行程差(第i環(huán)掘進完成之后的油缸行程差)為:
ΔLHi=L左-L右;
(1)
ΔLVi=L上-L下。
(2)
式(1)—(2)中: ΔLHi為左右油缸行程差; ΔLVi為上下油缸行程差。
由圖3可知,在既有環(huán)(第i環(huán))油缸行程差的基礎(chǔ)上,第i+1環(huán)在選定管片拼裝點位m時,拼完之后油缸行程差的變化值如下。
第i+1環(huán)相對于1點位的旋轉(zhuǎn)角度(默認1點位位于管環(huán)正上方)
θi+1=m·θ0;
(3)
左右油缸行程差
(4)
上下油缸行程差
ΔLVi+1=ΔLVi-(SB-SD)=ΔLVi+S·cos(-θi+1)。
(5)
式(3)—(5)中:θ0為管片臨近兩縱向螺栓孔與圓心連線的夾角;S為管片楔形量;SA、SC分別為管片水平方向投影的左側(cè)和右側(cè)寬度;SB、SD分別為管片豎直方向投影的上側(cè)和下側(cè)寬度。
以福州濱海快線項目為例,根據(jù)左上、左下、右上、右下各油缸分組在盾構(gòu)上的分布位置和各分區(qū)帶行程傳感器的油缸在盾體圓周的角度,可以推導(dǎo)出左上和右下油缸行程差ΔLLDi+1以及左下和右上油缸行程差ΔLRDi+1。推進油缸分區(qū)如圖4所示。

(6)

(7)
式(6)—(7)中: ΔLLDi+1、ΔLRDi+1分別為第i環(huán)掘進完成后的左上和右下油缸行程差及左下和右上油缸行程差;m為管片拼裝點位;n為管片拼裝點位的總數(shù)。
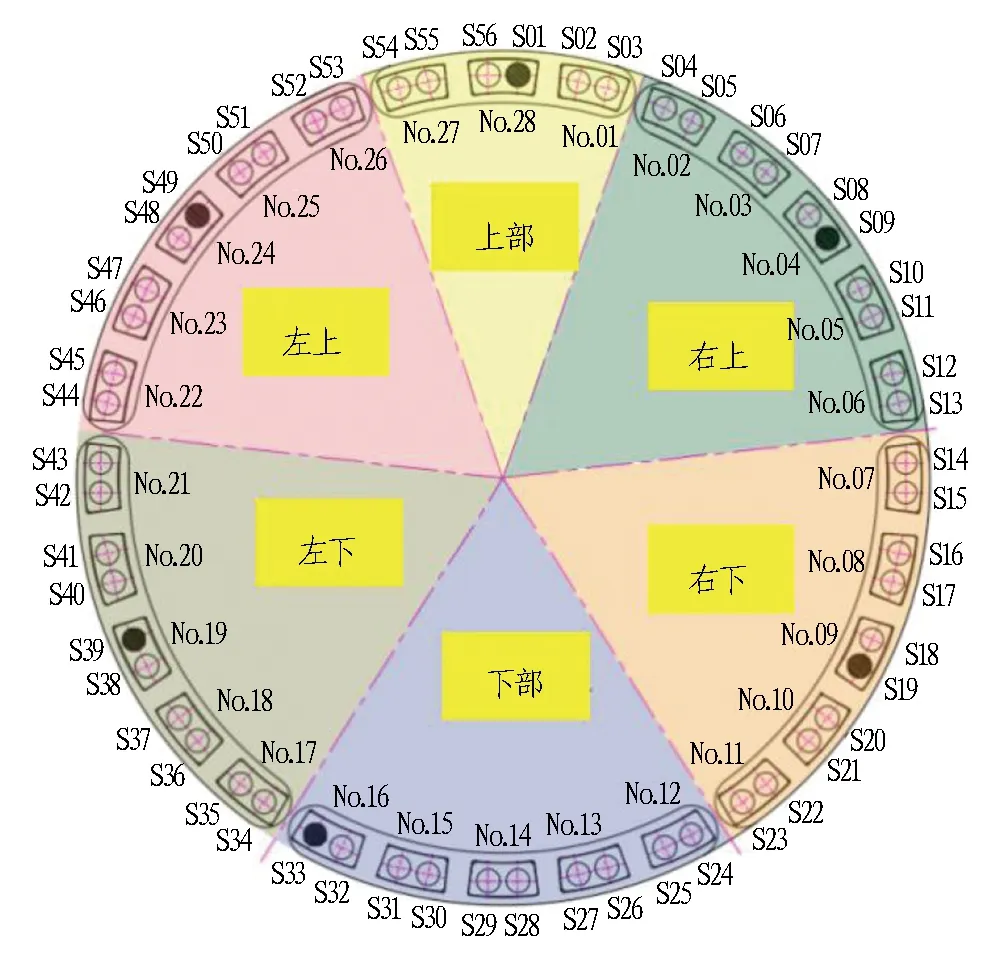
圖4 推進油缸分區(qū)圖
1.2.3 盾尾間隙計算
通過管片選型調(diào)整盾尾間隙,即調(diào)整管環(huán)與盾尾的相對位置關(guān)系,從而避免因盾尾間隙過小導(dǎo)致管片與盾尾擠壓、磕碰的情況,造成盾尾刷失效、管片破損等嚴重后果。
由于推進油缸行程差的存在,導(dǎo)致盾尾方向與管環(huán)方向不一致,由圖5示例可知,下一環(huán)管環(huán)點位雖然選在了正上方,卻并未造成上部盾尾間隙減小。因此,推進油缸行程差直接影響到管片拼裝后的盾尾間隙值,需要在計算方法上予以充分考慮。
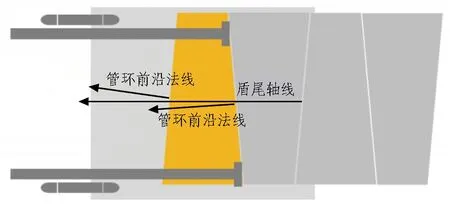
圖5 推進油缸行程差影響盾尾間隙示意圖
已拼管片(第i環(huán))的平面位置可以采用當(dāng)前油缸行程差表達,推進油缸與第i環(huán)管片形成的角度
(8)
(9)
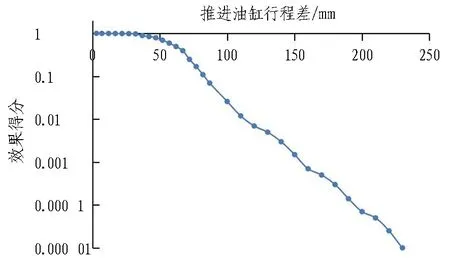
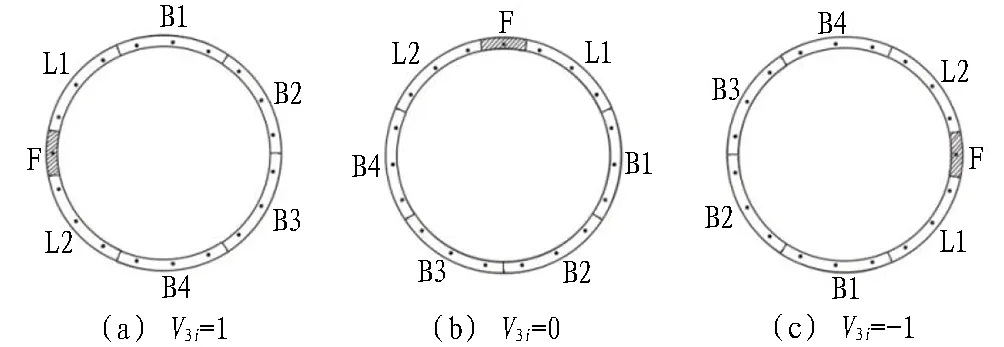
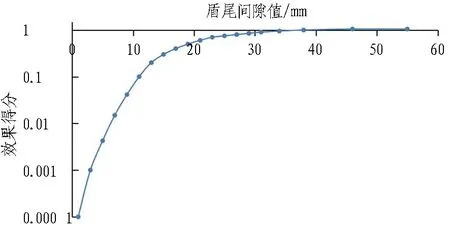
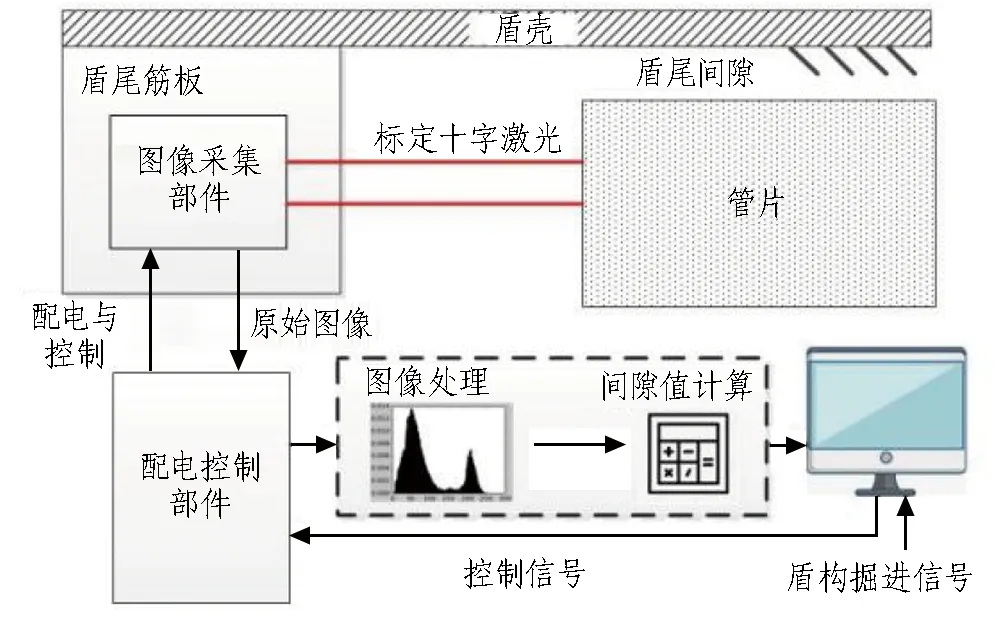
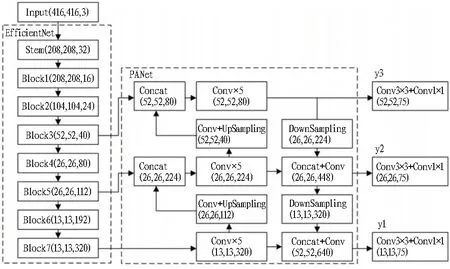
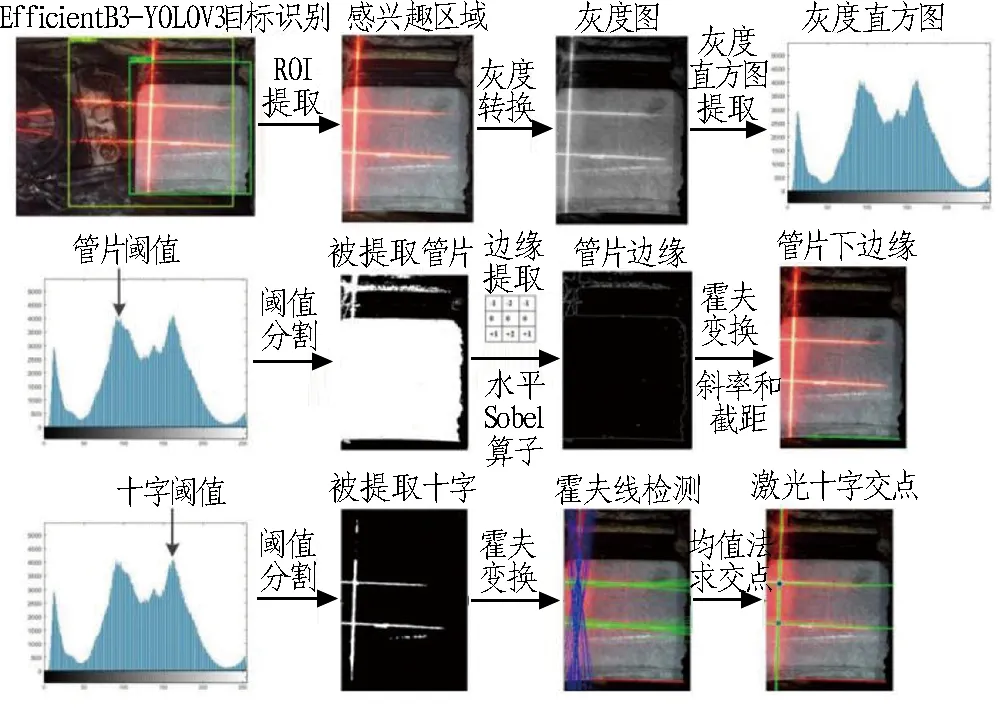
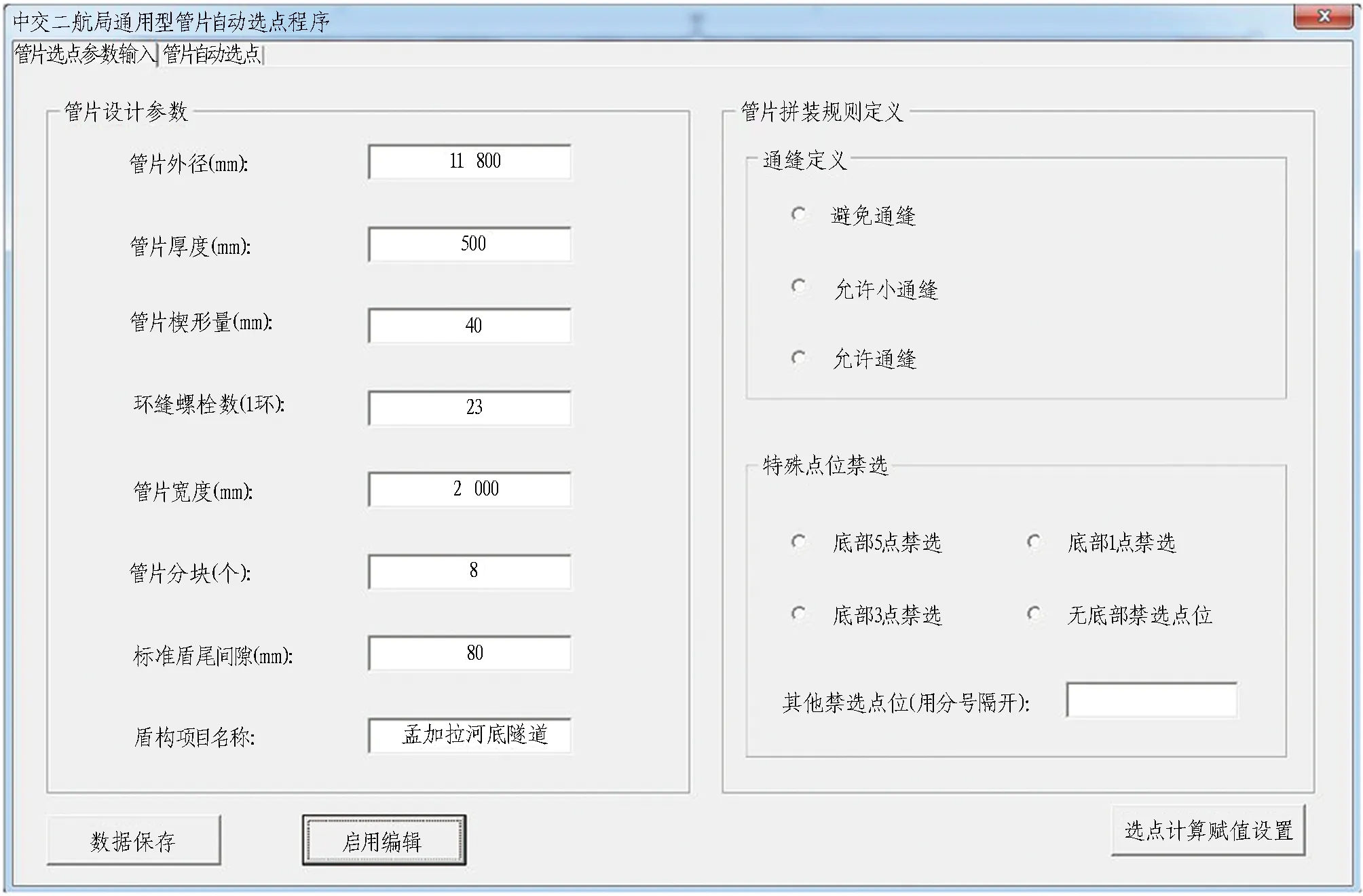
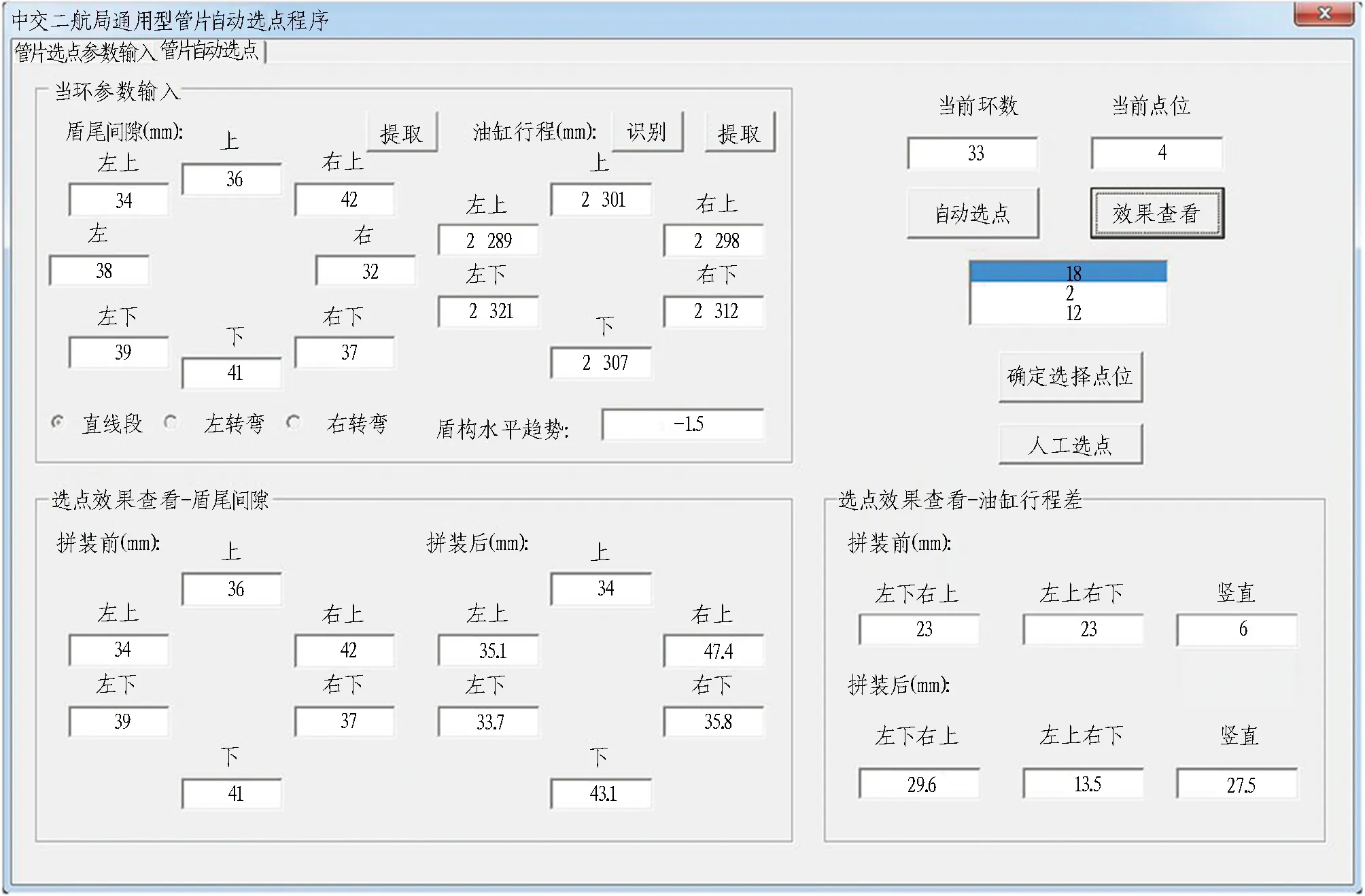
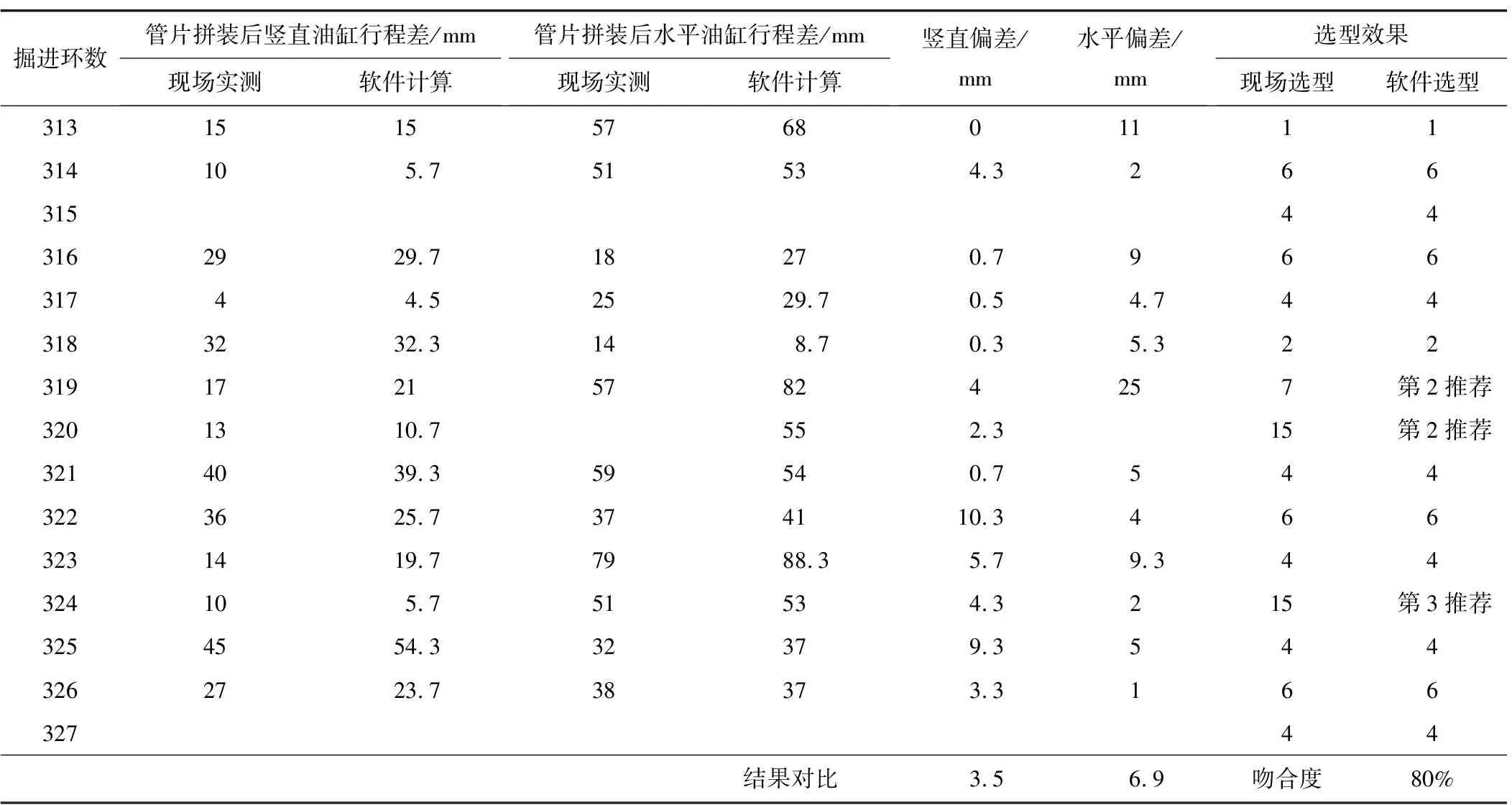
式(8)—(9)中:D為管片外徑;d為盾構(gòu)推進油缸的安裝直徑;γ0、β0分別為第i環(huán)管片與左側(cè)油缸及上側(cè)油缸的夾角,可以預(yù)見,當(dāng)L左 管片姿態(tài)以及各角度關(guān)系如圖6所示,第i+1環(huán)管片左側(cè)水平投影角度γ和上側(cè)豎直投影角度β分別為 (10) (11) (a) (b) 第i+1環(huán)管片拼裝完成后,設(shè)左、右、上、下的盾尾間隙變化值為Δδ左、Δδ右、Δδ上、Δδ下。因此,根據(jù)圖6可得: Δδ左=SA·sin(γ0-γ); (12) Δδ右=-SC·sin(γ0-γ); (13) Δδ上=SB·sin(β0-β); (14) Δδ下=-SD·sin(β0-β)。 (15) 同理,根據(jù)右上、左下盾尾間隙測量的投影幾何關(guān)系可以推導(dǎo)出右上、左下盾尾間隙變化值Δδ右上、Δδ左下。 (16) (17) 式(16)—(17)中:W為管片平均環(huán)寬;L左下、L右下分別為左下和右上油缸行程差,左上、右下盾尾間隙變化值計算推導(dǎo)公式不一一列出。 通過上述公式即可計算出第i+1環(huán)管片拼裝后的8組盾尾間隙變化量Δδ,與各自拼裝前的盾尾間隙測量值δi之和即為第i+1環(huán)管片拼裝后的8組盾尾間隙值δi+1。 2.1.1 選型決策算法調(diào)查問卷 軟件開發(fā)前,收集了包括技術(shù)管理人員、盾構(gòu)司機、管片拼裝手在內(nèi)的幾十位長期參與管片選型的技術(shù)人員的調(diào)查問卷,如圖7所示,獲得了以下成果。 圖7 管片自動選型算法參數(shù)取值調(diào)查問卷 1)根據(jù)調(diào)查成果總結(jié)出6 m級、8 m級、12 m級等不同尺寸盾構(gòu)項目在管片選型時盾尾間隙和油缸行程參數(shù)的理想范圍、可接受范圍、危險范圍和完全不可接受范圍。 2)根據(jù)調(diào)查成果總結(jié)出盾尾間隙、油缸行程和隧道線形在直線段、曲線段、盾構(gòu)糾偏時各自的權(quán)重分配占比以及3種情況下管片選型的控制要點。 3)每一環(huán)管片選型時必須綜合考慮各影響因素,如果僅考慮單一因素,會造成其他因素的急劇惡化。 4)項目一線人員在管片選型時,除了考慮盾尾間隙和油缸行程,還要考慮盾構(gòu)趨勢,在曲線段掘進或盾構(gòu)糾偏時,需要重點關(guān)注盾構(gòu)趨勢的變化,然后通過管片選型的先行量起到對盾構(gòu)糾偏的誘導(dǎo)作用,從而輔助盾構(gòu)糾偏。 在綜合參考各受調(diào)查人員關(guān)于管片選型的思路和權(quán)重取值建議的基礎(chǔ)上,結(jié)合合理的簡化計算模型,形成了管片選型決策權(quán)重取值的核心算法。 2.1.2 賦值 本系統(tǒng)管片選型決策模塊原理為: 對盾尾間隙、推進油缸行程差、盾構(gòu)趨勢3個主要因素的重要性系數(shù)I1i、I2i、I3i和效果得分V1i、V2i、V3i進行賦值,計算第i+1環(huán)各待選點位的綜合得分,選取i+1環(huán)最優(yōu)拼裝點位。各待選點位的計算綜合值為 Ji=V1iI1i+V2iI2i+V3iI3i。 (18) 式中:i為管片拼裝點位;重要性系數(shù)I1i、I2i、I3i依據(jù)第i+1環(huán)管片拼裝前的盾尾間隙、推進油缸行程差、盾構(gòu)趨勢的情況進行賦值,重要性系數(shù)越大,表示該項因素的情況越差,越需要通過管片選型來優(yōu)化;效果得分V1i、V2i、V3i依據(jù)i+1環(huán)管片模擬拼裝后的盾尾間隙、推進油缸行程差、盾構(gòu)趨勢的計算值進行賦值,某一因素的效果得分越高,表示管片模擬拼裝之后對該項因素的優(yōu)化效果越好。 2.1.2.1 盾尾間隙權(quán)重賦值 1)通過數(shù)據(jù)錄入模塊得到第i+1環(huán)管片拼裝前所測得的8個方向的盾尾間隙值,自動選取最小盾尾間隙值進行重要性系數(shù)I1i賦值。盾尾間隙重要性系數(shù)的賦值隨著盾尾間隙值的減小而增大,表示管片拼裝前的盾尾間隙越小,情況就越差,管片選型時考慮盾尾間隙的權(quán)重就越高。以某區(qū)段盾尾間隙的重要性系數(shù)I1i為臨界值,取為1,盾尾間隙大于該臨界值時,I1i=1,表示其重要性系數(shù)不予考慮;小于臨界值時,I1i>1,并隨著盾尾間隙減小而減小。 2)通過模擬拼裝計算得到i+1環(huán)各個待選點位管環(huán)拼裝后盾尾8個方向上的間隙值,自動根據(jù)最小盾尾間隙計算值進行效果得分V1i賦值。盾尾間隙效果得分賦值范圍為0 2.1.2.2 推進油缸行程差權(quán)重賦值 1)獲取第i環(huán)盾構(gòu)掘進完成時6組油缸行程值,自動計算對應(yīng)的3組油缸行程差,依據(jù)最大油缸行程差進行重要性系數(shù)I2i賦值。取某界限油缸行程差值d的重要性系數(shù)為臨界值,取為1,當(dāng)油缸行程差d0≤d時,對應(yīng)的重要性系數(shù)I2i=1,表示此時油缸行程差較小,情況較好,在管片選型時可不予考慮;當(dāng)d0>d時,I2i>1,且I2i隨著d0的增大而增大,表示管片拼裝前的油缸行程差越大,情況就越差,管片點位選型時考慮油缸行程的權(quán)重就越高。 2)通過模擬拼裝計算得到i+1環(huán)各個待選點位管環(huán)拼裝后的3組油缸行程差,根據(jù)最大油缸行程差值進行效果得分V2i賦值,其中0 圖8 模擬拼裝后油缸行程差計算值與其效果得分關(guān)系曲線圖 2.1.2.3 盾構(gòu)趨勢權(quán)重賦值 管片選型準確與否,影響著盾構(gòu)推進姿態(tài)。當(dāng)盾構(gòu)掘進過程朝一側(cè)發(fā)生較大的趨勢時,表明此時后部管片的支撐合力朝該側(cè)發(fā)生了偏斜并產(chǎn)生了一個附加的分力,如不及時采取措施,盾構(gòu)姿態(tài)會在未來幾環(huán)中,在此分力的作用下逐漸朝該側(cè)偏移并不斷惡化,同時回糾困難,若采取姿態(tài)強行回糾的措施,又會造成盾構(gòu)姿態(tài)蛇形前進,從而反噬成型隧道質(zhì)量。因此,在盾構(gòu)朝一側(cè)出現(xiàn)較大趨勢時,及時通過合理的管片選型,依靠管片的先行量調(diào)整管環(huán)支撐合力的方向,起到對盾構(gòu)糾偏的誘導(dǎo)作用,有效遏制盾構(gòu)姿態(tài)惡化。 1)通過數(shù)據(jù)錄入模塊得到管片拼裝前的盾構(gòu)趨勢值,依據(jù)趨勢值進行重要性系數(shù)I3i賦值。以水平方向為例,趨勢朝右為正,當(dāng)盾構(gòu)趨勢<0,I3i>0,盾構(gòu)趨勢>0,I3i<0,且隨著盾構(gòu)趨勢值(絕對值)的增大,重要性系數(shù)I3i賦值(絕對值)逐漸增大,反之則逐漸減小;當(dāng)管片拼裝前的盾構(gòu)趨勢為0,I3i=0,表示此時管片選型無需考慮盾構(gòu)趨勢的權(quán)重。 2)根據(jù)盾構(gòu)趨勢的方向和管環(huán)封頂塊的方向確定盾構(gòu)趨勢效果得分V3i的上限臨界值、中間值和下限臨界值。如盾構(gòu)水平趨勢為正值,表示盾構(gòu)趨勢朝設(shè)計軸線右側(cè)(如圖9所示),此時封頂塊在正左側(cè)的管環(huán)糾偏效果最佳,效果得分為上限臨界值1;封頂塊在正上和正下側(cè)的管環(huán)效果為0,對應(yīng)的效果得分為中間值0;封頂塊在右側(cè)的管環(huán)效果最差,效果得分為下限臨界值-1。對于其他封頂塊在左側(cè)的管環(huán),其效果得分0 圖9 盾構(gòu)趨勢效果得分示意圖 1)各因素權(quán)重賦值(重要性系數(shù)和效果得分)須覆蓋所有可能出現(xiàn)的取值范圍。如施工中,推進油缸行程差正常范圍在0~60 mm,但是軟件的取值范圍設(shè)置為0~250 mm(如圖8所示),即使遇到極端情況(推進油缸行程差極大,這在施工中是可能出現(xiàn)的),仍然能夠正常進行管片選型。出于同樣的考慮,各因素權(quán)重賦值不取0,即使當(dāng)前某因素參數(shù)值極差,如當(dāng)推進油缸行程差達到了200 mm(如圖8所示),雖然在施工中無法接受,但是其對應(yīng)的權(quán)重賦值取為7×10-5,仍不能取0。 2)考慮各因素的參數(shù)值在不同區(qū)段對管片選型影響程度的不同,各因素的參數(shù)值與其賦值并非線性關(guān)系,而是在不同區(qū)段有不同的變化速率。如盾尾間隙在10~20 mm的賦值變化速率要大于盾尾間隙在20 mm以上的情況,同時小于盾尾間隙小于10 mm的情況,如圖10所示,盾尾間隙對管片選型的效果得分權(quán)重會隨著盾尾間隙的變小而加速減小。 圖10 模擬拼裝后盾尾間隙計算值與其效果得分關(guān)系曲線圖 3)因不同因素在當(dāng)前環(huán)選型的重要性程度和選型效果好壞各不相同,其賦值的大小以及賦值隨因素數(shù)值變化而變化的速率也存在差別。結(jié)合成熟施工經(jīng)驗和工程案例分析,考慮到盾尾間隙對于保護隧道施工安全起到的關(guān)鍵作用,如果控制不當(dāng),后果最為嚴重,系統(tǒng)綜合權(quán)重分配為: 盾尾間隙>推進油缸行程差>盾構(gòu)趨勢。 4)考慮到在不同情況下(小半徑曲線段、糾偏段、直線段等)各因素賦值的差別,如在小半徑曲線段,兩側(cè)油缸行程差賦值要高于上下油缸行程差賦值,突顯了在急曲線轉(zhuǎn)彎時,兩側(cè)油缸行程對于控制盾構(gòu)及成型管片姿態(tài)的重要程度高于上下油缸行程,系統(tǒng)在管片選型時優(yōu)先考慮平衡兩側(cè)油缸的行程差。 利用盾尾間隙智能化監(jiān)測設(shè)備的數(shù)據(jù)接口以及監(jiān)控屏幕參數(shù)圖像識別技術(shù),實現(xiàn)了管片選型參數(shù)的自動提取,真正實現(xiàn)了快速、一鍵式的管片點位自動選型,大大提升了軟件的實用性和智能化程度。 盾尾間隙智能化監(jiān)測系統(tǒng)基于機器視覺測量技術(shù)對盾尾間隙進行非接觸式測量[10],利用CCD工業(yè)相機對帶有雙十字激光器標定的盾尾管片端面拍攝得到原始圖片,圖片通過系統(tǒng)軟件智能圖像處理與分析,根據(jù)預(yù)設(shè)計的位置關(guān)系、激光標定、計算方法得到高精度的盾尾間隙值(誤差±2~±3 mm),并自動導(dǎo)入管片自動選型軟件,如圖11所示。 圖11 盾尾間隙智能化監(jiān)測系統(tǒng)架構(gòu) 圖像處理作為整個盾尾間隙自動監(jiān)測系統(tǒng)的關(guān)鍵功能,主要包含目標檢測、圖像增強和特征提取。 1)目標檢測是從輸入原始圖像中定位并檢測出感興趣區(qū)域(range of interest, ROI),避免圖像中非測量區(qū)域的干擾。為減少神經(jīng)網(wǎng)絡(luò)參數(shù)、縮短檢測時間、提升檢測效率,使用Efficientnet-B3代替YOLOV3的主干提取網(wǎng)絡(luò)Darknet53,對YOLOV3的目標檢測,算法進行輕量化處理,經(jīng)過主干網(wǎng)絡(luò)卷積處理后,在原有算法自上而下的特征圖像金字塔網(wǎng)絡(luò)后增添自下而上的融合增強,即將FPN替換為PANet,最終得到3個不同維度的分支結(jié)果,進行多尺度目標檢測,網(wǎng)絡(luò)結(jié)構(gòu)如圖12所示。 圖12 目標檢測網(wǎng)絡(luò)結(jié)構(gòu)圖 2)圖像增強的主要作用是強化圖像細節(jié),改善圖像質(zhì)量,為后續(xù)的特征提取提供較好的前提條件。 3)特征提取即在圖像增強后提取出管片下邊緣和十字激光器投射出的激光線標識,作為盾尾間隙計算的直接依據(jù)。圖像處理過程如圖13所示。 圖13 圖像處理過程 開發(fā)屏幕數(shù)據(jù)實時圖像識別模塊,管片選型時,自動截取當(dāng)前盾構(gòu)監(jiān)控屏幕圖像,經(jīng)過成套數(shù)字圖像處理算法,無需盾構(gòu)控制系統(tǒng)數(shù)據(jù)接口,可自動獲取推進油缸行程和盾構(gòu)趨勢等相關(guān)數(shù)據(jù),使軟件可以便捷、靈活地應(yīng)用于不同項目。 圖像處理的主要過程為: 制作數(shù)字模板圖像,將各數(shù)字模板圖像經(jīng)過灰度處理、二值化分割、尋找數(shù)字輪廓等操作之后,保存于列表之中備用;實時從盾構(gòu)監(jiān)控系統(tǒng)屏幕截取圖像,根據(jù)目標參數(shù)在圖像中的像素坐標,逐個提取各目標數(shù)據(jù)框圖像,經(jīng)過灰度處理、高斯濾波、閾值分割、頂帽操作、邊緣檢測等一系列圖像處理操作,提取對應(yīng)參數(shù)的數(shù)字輪廓,與數(shù)字模板進行模板匹配操作,輸出匹配度最高的數(shù)字組,識別所需要的監(jiān)控屏幕參數(shù),如圖14所示,并自動導(dǎo)入管片自動選型軟件。 (a) 屏幕參數(shù)讀取圖像 (b) 提取數(shù)據(jù)框圖像 管片選型參數(shù)輸入界面如圖15所示,左側(cè)為管片設(shè)計參數(shù)輸入模塊,右側(cè)為管片拼裝規(guī)則定義模塊。管片設(shè)計參數(shù)輸入模塊可錄入所在項目的管片主要設(shè)計參數(shù),作為管片選型計算模型的主要參數(shù);管片拼裝規(guī)則定義模塊可按照所在項目的要求來定義管片拼裝規(guī)則,在管片選型前, 先規(guī)定管片拼裝規(guī)則是通縫還是錯縫,然后檢查是否有項目要求的不能選擇的特殊點位。 圖15 管片選型參數(shù)輸入界面 管片自動選型界面如圖16所示,左上方為當(dāng)環(huán)參數(shù)輸入模塊,每一環(huán)管片選型均需要錄入當(dāng)環(huán)的盾尾間隙、油缸行程和盾構(gòu)趨勢(盾尾間隙和油缸行程可自動提取)。其中,盾尾間隙和油缸行程為必填參數(shù),盾構(gòu)趨勢可選填,若盾構(gòu)趨勢參數(shù)已錄入,軟件自動依據(jù)盾尾間隙、油缸行程、盾構(gòu)趨勢3因素進行管片選型,否則,將自動依據(jù)前兩者進行管片選型。 軟件基于管片拼裝規(guī)則定義以及第i環(huán)管片點位,自動篩選出所有第i+1環(huán)待選點位,點擊“自動選點”,開始自動管片選型,在“推薦點位輸出框”輸出綜合得分前3的點位,選擇其中任意點位,點擊“效果查看”,即可查看在管片拼裝前后盾尾間隙和油缸行程差的變化情況。選取其中之一,點擊“確定選擇點位”,完成當(dāng)前環(huán)管片選型。若推薦點位不滿足現(xiàn)場需求,也可點擊“人工選點”,手動輸入目標點位。 圖16 管片選型效果查看 先后在深圳地鐵6號線支線、孟加拉卡納普里河底隧道、武漢地鐵11號線等項目開展長期軟件測試,軟件管片自動選型結(jié)果與人工選型綜合吻合度在70%以上,通過對比現(xiàn)場實測與軟件計算的管片拼裝后的參數(shù)值,驗證了算法的合理性。 以武漢地鐵11號線丁字橋—馬房山區(qū)間測試為例,對部分現(xiàn)場實測與軟件計算的管片拼裝后的油缸行程差進行對比,軟件選型與實際選型數(shù)據(jù)統(tǒng)計如表1所示。 測試結(jié)果顯示,采用軟件選型與現(xiàn)場人工選型的吻合度達到80%,軟件計算的管片拼裝后油缸行程差值與實測值的平均誤差為3.5 mm(豎直)、6.9 mm(水平)。考慮到實際施工中,盾構(gòu)掘進完成回收油缸之后的管片回彈、管片拼裝誤差、管片張開和錯臺等因素的影響,軟件算法總體合理,契合現(xiàn)場實際。 表1 第313—327環(huán)軟件選型驗證數(shù)據(jù) 經(jīng)多個項目現(xiàn)場測試和結(jié)合算法優(yōu)化,于2021年11月將該軟件正式應(yīng)用于福州地鐵濱海快線項目,軟件預(yù)裝于盾構(gòu)監(jiān)控室系統(tǒng)內(nèi),管片選型時自動讀取監(jiān)控屏幕參數(shù),如圖17所示。 經(jīng)過初期驗證之后,軟件選型與人工選型的結(jié)果基本一致,后續(xù)施工中,基本按照軟件選型的結(jié)果進行管片點位選取,截至發(fā)稿前,本項目大—濱區(qū)間右線隧道已經(jīng)順利貫通,成型隧道質(zhì)量良好,隧道線形偏差均滿足要求(如圖18所示),表示在此期間,管片自動化選型系統(tǒng)所選點位滿足盾構(gòu)掘進和管片拼裝要求。 圖17 管片自動選型軟件項目應(yīng)用 圖18 貫通隧道質(zhì)量 研發(fā)管片自動點位選型算法系統(tǒng),實現(xiàn)當(dāng)前環(huán)拼裝點位自動選擇,主要結(jié)論與討論如下: 1)提出了綜合考慮盾尾間隙、推進油缸行程差和盾構(gòu)趨勢的管片選型運算和決策算法,充分考慮了各影響因素實際施工中所有可能出現(xiàn)的取值范圍,以及各影響因素在不同取值范圍、不同施工工況下的權(quán)重變化,大大提升了管片點位選型軟件的工程適用性。 2)首次研發(fā)6組油缸+8組盾尾間隙輸入值的管片選型算法,滿足了大直徑盾構(gòu)的施工要求,有利于隧道質(zhì)量和盾構(gòu)姿態(tài)的精細化控制。 3)研發(fā)監(jiān)控屏幕實時識別技術(shù)以及盾尾間隙智能測量技術(shù),實現(xiàn)了管片選型相關(guān)參數(shù)自動提取,省去了人工參數(shù)輸入環(huán)節(jié),真正實現(xiàn)了軟件一鍵自動選型,減輕了一線作業(yè)人員的工作負擔(dān)。 4)經(jīng)多個項目現(xiàn)場驗證和應(yīng)用,管片點位選型算法合理,與人工選型吻合度高,契合現(xiàn)場盾構(gòu)掘進和管片拼裝施工要求,可真正用于指導(dǎo)現(xiàn)場施工生產(chǎn),起到規(guī)范或代替人工管片選型、保障盾構(gòu)掘進姿態(tài)和成型隧道質(zhì)量的作用。 雖然相比于直線+左右轉(zhuǎn)彎環(huán)管片,通用型管片不需要在隧道施工前根據(jù)管片預(yù)排版結(jié)果來安排管片生產(chǎn),但是,在前方存在聯(lián)絡(luò)通道鋼管片或者需要更換盾尾刷的工況下,仍需要提前對未來5~10環(huán)的管片進行預(yù)排版。因此,管片中心軸線與隧道設(shè)計軸線的相對關(guān)系作為管片預(yù)排版算法的基礎(chǔ),將是本算法繼續(xù)深入研究的方向之一。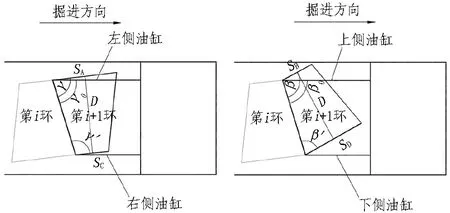


2 管片點位自動選型決策
2.1 決策模塊
2.2 權(quán)重賦值原則
3 管片選型參數(shù)自動提取
3.1 盾尾間隙智能化監(jiān)測
3.2 監(jiān)控屏幕數(shù)據(jù)自動識別

4 管片自動選型軟件界面
4.1 管片選型參數(shù)輸入界面
4.2 管片自動選型界面
5 工程應(yīng)用
5.1 現(xiàn)場測試
5.2 工程應(yīng)用

6 結(jié)論與討論