基于電磁力的轉(zhuǎn)子不平衡-不對(duì)中振動(dòng)靶向抑制
2022-06-08 07:33:32暴一帆國(guó)玉林姚劍飛
軸承 2022年3期
暴一帆,國(guó)玉林,姚劍飛
(北京化工大學(xué) 機(jī)電工程學(xué)院,北京 100029)
旋轉(zhuǎn)機(jī)械是現(xiàn)代工業(yè)的重要設(shè)備,其穩(wěn)定性直接影響企業(yè)的生產(chǎn)安全和經(jīng)濟(jì)效益。旋轉(zhuǎn)機(jī)械轉(zhuǎn)子系統(tǒng)運(yùn)行環(huán)境惡劣,受多種激勵(lì)源的作用,振動(dòng)故障耦合嚴(yán)重,振動(dòng)成分復(fù)雜且噪聲較大,若不及時(shí)有效抑制轉(zhuǎn)子振動(dòng),故障會(huì)進(jìn)一步惡化,從而導(dǎo)致事故的發(fā)生。
主動(dòng)磁軸承因具有無(wú)接觸、無(wú)摩擦、無(wú)潤(rùn)滑、無(wú)密封、低功耗等特點(diǎn),常作為執(zhí)行機(jī)構(gòu)用于轉(zhuǎn)子振動(dòng)的主動(dòng)控制[1]。國(guó)內(nèi)外學(xué)者在利用電磁力抑制旋轉(zhuǎn)機(jī)械轉(zhuǎn)子系統(tǒng)振動(dòng)方面做了大量研究。轉(zhuǎn)子不平衡振動(dòng)(以工頻振動(dòng)為主)抑制方面:文獻(xiàn)[2]提出一種結(jié)合新型自適應(yīng)陷波濾波器的前饋控制策略解決磁懸浮離心壓縮機(jī)轉(zhuǎn)子不平衡問(wèn)題;文獻(xiàn)[3]設(shè)計(jì)實(shí)時(shí)變步長(zhǎng)多邊形迭代搜尋算法的不平衡補(bǔ)償器抑制轉(zhuǎn)子振動(dòng);文獻(xiàn)[4]提出一種基于幅值和相位特征的不平衡力快速尋優(yōu)前饋算法;文獻(xiàn)[5]提出了一種基于電磁作動(dòng)器(Active Magnetic Actuator,AMA)的比例-微分(Proportional Differential,PD)反饋控制算法抑制轉(zhuǎn)子不平衡引起的基頻振動(dòng)。轉(zhuǎn)子不對(duì)中故障(以工頻、二倍頻為主的復(fù)合振動(dòng))或多頻振動(dòng)抑制方面:文獻(xiàn)[6-7]通過(guò)變步長(zhǎng)尋優(yōu)策略得到電磁作動(dòng)器所需的最佳電流,向轉(zhuǎn)子施加多頻率成分電流實(shí)現(xiàn)轉(zhuǎn)子多頻振動(dòng)前饋抑制;文獻(xiàn)[8]通過(guò)電流補(bǔ)償算法有效抑制了轉(zhuǎn)子系統(tǒng)的多頻振動(dòng);文獻(xiàn)[9]參考不平衡試算法,從理論仿真方面提出了一種不對(duì)中故障的試算方法。
文獻(xiàn)[2-4]均基于前饋算法對(duì)轉(zhuǎn)子不平衡故障進(jìn)行主動(dòng)抑制,抗擾動(dòng)能力及控制穩(wěn)定性差,文獻(xiàn)[5]PD反饋控制算法穩(wěn)定性?xún)?yōu)異,但在惡劣工況及全頻隨機(jī)噪聲的影響下控制精度較低,缺少振動(dòng)抑制的靶向性,此外,PD算法主要用于單一頻率、單一故障抑制,有必要考慮PD算法抑制轉(zhuǎn)子振動(dòng)的靶向性,對(duì)其在多頻率、多故障的振動(dòng)抑制進(jìn)行研究。
振動(dòng)靶向抑制方面:文獻(xiàn)[10]提出靶向抑制概念,即通過(guò)分析故障的機(jī)理和特征,找準(zhǔn)故障靶點(diǎn),以采取相應(yīng)措施精準(zhǔn)抑制轉(zhuǎn)子振動(dòng);文獻(xiàn)[11]闡述了透平機(jī)械系統(tǒng)中的振動(dòng)靶向抑制,分析了透平機(jī)械轉(zhuǎn)子-軸承系統(tǒng)中轉(zhuǎn)子的多頻率成分振動(dòng)的靶向抑制;文獻(xiàn)[12]針對(duì)旋轉(zhuǎn)機(jī)械氣壓液體式不平衡振動(dòng)故障,利用氣壓液體式自動(dòng)平衡裝置搭建了靶向自愈調(diào)控系統(tǒng)。
本文基于文獻(xiàn)[10-12]的靶向抑制思路,將其應(yīng)用到基于AMA的PD控制策略,以抑制轉(zhuǎn)子不平衡和不對(duì)中耦合故障。采用AMA作為控制執(zhí)行機(jī)構(gòu),設(shè)計(jì)了基于電磁作動(dòng)器的PD算法控制器,以抑制旋轉(zhuǎn)機(jī)械轉(zhuǎn)子系統(tǒng)不平衡-不對(duì)中耦合故障引起的周期振動(dòng)。
1 系統(tǒng)建模
1.1 動(dòng)力學(xué)建模
基于有限元法建立轉(zhuǎn)子-軸承-AMA系統(tǒng)(圖1)動(dòng)力學(xué)模型,即
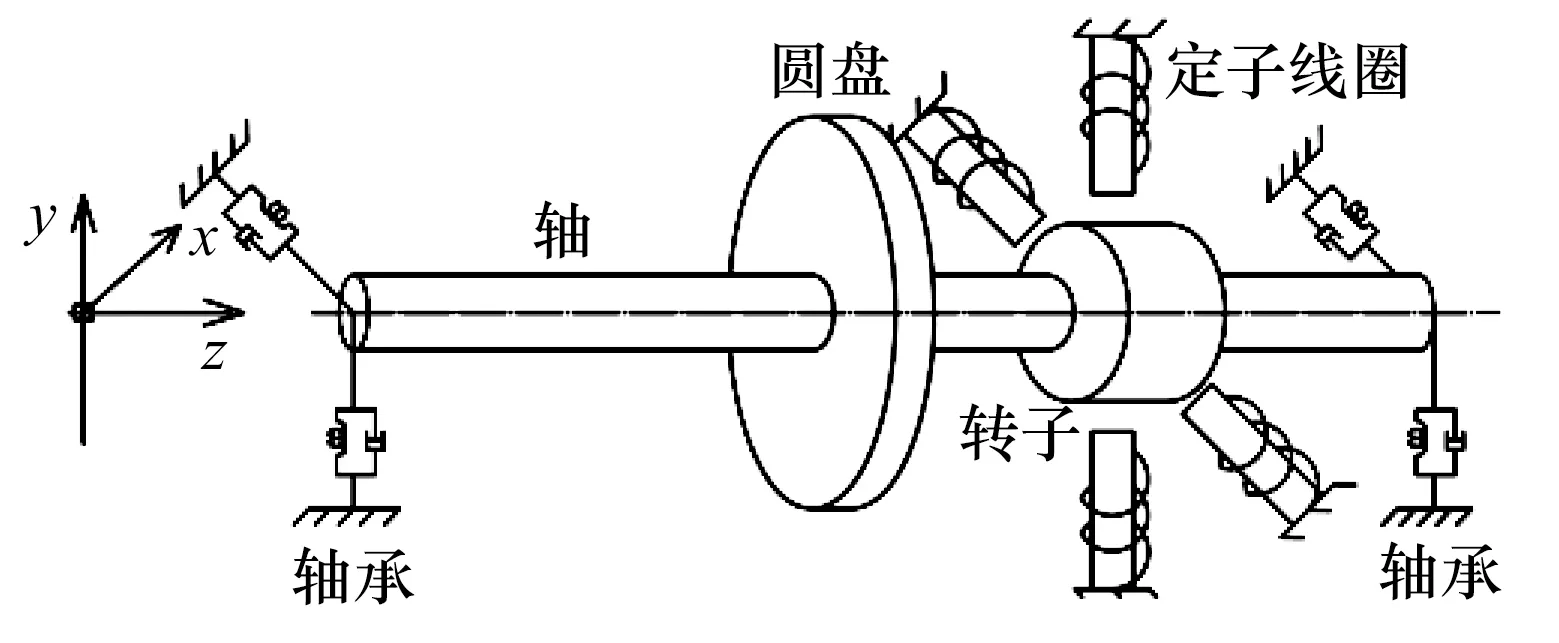
圖1 轉(zhuǎn)子-軸承-AMA系統(tǒng)示意圖Fig.1 Diagram of rotor-bearing-AMA system
(1)
式中:M,C,K分別為系統(tǒng)的質(zhì)量矩陣、阻尼矩陣和剛度矩陣;Z為位移列向量;F1為廣義干擾力,包含不平衡力Fd和不對(duì)中力Fc;F2為主動(dòng)控制力,包含電磁力Fmag。
圓盤(pán)結(jié)點(diǎn)處所受不平衡力如圖2所示,O為轉(zhuǎn)軸形心,O1為圓盤(pán)形心,不平衡力可表示為
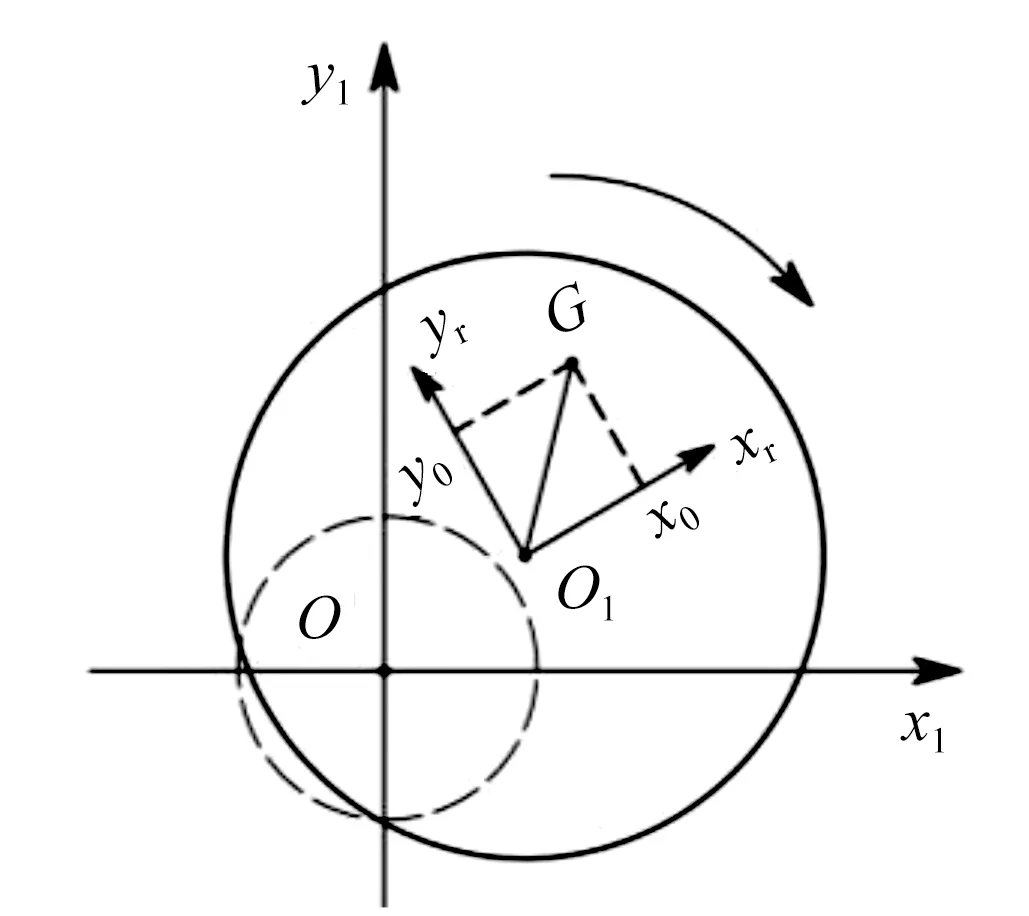
圖2 轉(zhuǎn)子不平衡示意圖Fig.2 Diagram of rotor unbalance
(2)
式中:md為圓盤(pán)偏心質(zhì)量;ω為轉(zhuǎn)子角速度;t為時(shí)間;(a0,b0) 為質(zhì)心坐標(biāo)。
考慮軸系連接處的平行不對(duì)中力,以二倍頻為主,采用等效軸段法建立聯(lián)軸器模型,如圖3所示,O2為轉(zhuǎn)軸對(duì)應(yīng)半聯(lián)軸器的形心,O3為電動(dòng)機(jī)對(duì)應(yīng)半聯(lián)軸器的形心,A為半聯(lián)軸器和聯(lián)軸器中間軸的螺栓連接點(diǎn)。令不對(duì)中偏差量坐標(biāo)為(δx,δy),聯(lián)軸器徑向剛度取Kc,不對(duì)中力可表示為[13]

圖3 聯(lián)軸器平行不對(duì)中示意圖Fig.3 Diagram of coupling parallel misalignment
(3)
采用12極E型結(jié)構(gòu)AMA,其y方向結(jié)構(gòu)如圖4所示,y方向上下電磁力合力可表示為
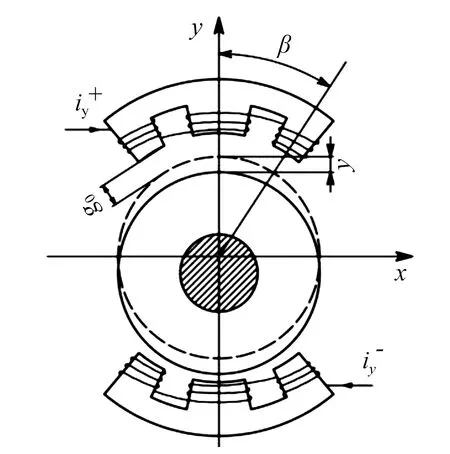
圖4 AMA y方向結(jié)構(gòu)圖Fig.4 Structure diagram of AMA along y direction
(4)
ka=49μ0N2A02(1+cosβ)/128,

(5)
Ks=4kai02/g03,
Ki=4kai0/g02,
式中:Ks為位移剛度;Ki為電流剛度。
假設(shè)x,y方向氣隙均勻,磁極面積相同,忽略2個(gè)方向的磁場(chǎng)耦合和漏磁,可認(rèn)為2個(gè)方向位移剛度和電流剛度相等,則
-Ksza+Kiic,
(6)

干擾力和控制力需要通過(guò)變換矩陣將局部坐標(biāo)系下的力轉(zhuǎn)換至整體坐標(biāo)系下,即變換成與 (1) 式階數(shù)相同的矩陣。以電磁力為例,通過(guò)變換矩陣Tc可得
(7)
對(duì)(1)式變化可得
(8)
新的剛度矩陣可表示為
(9)
1.2 狀態(tài)空間方程
為便于求解運(yùn)動(dòng)方程的瞬態(tài)解,將上述的有限元方程轉(zhuǎn)換為狀態(tài)空間方程,定義狀態(tài)空間向量為
(10)
(11)
將(11)式轉(zhuǎn)化為一階微分方程形式,代入(10)式可得
(12)
Bsu=[0M-1]T,
式中:As為系統(tǒng)矩陣;Bsa,Bsu分別為電磁作動(dòng)器電流和干擾力的輸入矩陣。
2 控制律及濾波器設(shè)計(jì)
考慮旋轉(zhuǎn)機(jī)械系統(tǒng)的多頻振動(dòng),將振動(dòng)故障的靶點(diǎn)表示為[11]
Θ(EN1,EN2,…,ENn;IN1,IN2,…,INn;QN1,QN2,…,QNn),
(13)
式中:EN為能量流層面的特征參數(shù)(如執(zhí)行機(jī)構(gòu)的驅(qū)動(dòng)能量等);IN為信息流層面的特征參數(shù)(如控制系統(tǒng)中的參數(shù)信息等);QN為物質(zhì)流層面的特征參數(shù)(如系統(tǒng)中的介質(zhì)等)。
結(jié)合旋轉(zhuǎn)機(jī)械中能量流、信息流和物質(zhì)流的特征,搭建旋轉(zhuǎn)機(jī)械實(shí)時(shí)狀態(tài)監(jiān)測(cè)系統(tǒng),采用多頻振動(dòng)響應(yīng)的特征頻率、幅值、相位等參數(shù)來(lái)表征振動(dòng)故障靶點(diǎn),針對(duì)試驗(yàn)臺(tái)實(shí)時(shí)頻譜瀑布圖中較為突出的工頻和二倍頻,分析其機(jī)理,準(zhǔn)確定位靶點(diǎn),有針對(duì)性地選擇和設(shè)計(jì)控制律和濾波器,抑制不平衡和不對(duì)中故障引起的多頻振動(dòng)。
2.1 控制律設(shè)計(jì)
比例積分微分(Proportional Integration Differentiation,PID)控制屬于經(jīng)典線性控制器,是最早應(yīng)用于磁軸承的控制技術(shù)。以y方向采樣序號(hào)為n時(shí)的位移信號(hào)y(n)為例,設(shè)期望輸出為yd(n),系統(tǒng)偏差e(n)=yd(n)-y(n),則PID控制算法的時(shí)域控制律為
(14)
式中:kP為比例系數(shù);Ts為采樣時(shí)間;kD為微分系數(shù);t為采樣時(shí)刻。
考慮到實(shí)時(shí)控制系統(tǒng)對(duì)(14)式離散并整合調(diào)整參數(shù)后得到離散PID表達(dá)式為
(15)
式中:KP為比例增益;KI為積分增益;KD為微分增益。
積分控制主要用于消除系統(tǒng)靜態(tài)誤差選取不當(dāng)易引起的超調(diào)或積分飽和,考慮多倍頻周期振動(dòng)的主動(dòng)抑制,采用PD控制算法,即令Ki=0,則 (6) 式中局部坐標(biāo)系下的控制電流為
(16)
式中:KP為比例增益二階對(duì)角矩陣;KD為微分增益二階對(duì)角矩陣。
將(16)式整合到系統(tǒng)運(yùn)動(dòng)方程(8)式中,得到基于PD控制律的系統(tǒng)剛度矩陣K0、阻尼矩陣C0為
(17)
(18)
此時(shí),系統(tǒng)運(yùn)動(dòng)方程為
(19)
根據(jù)(17)—(19)式,通過(guò)調(diào)整比例增益和微分增益改變系統(tǒng)剛度和阻尼,以實(shí)現(xiàn)控制系統(tǒng)振幅。
2.2 濾波器設(shè)計(jì)
陷波濾波器采用二階(N=M=2)無(wú)限脈沖響應(yīng)數(shù)字濾波器,其遞歸方程為
(20)
式中:ak和bl為多項(xiàng)式系數(shù),考慮到多轉(zhuǎn)速控制以及精確靶向抑制的需要,多項(xiàng)式系數(shù)通過(guò)實(shí)時(shí)轉(zhuǎn)速和陷波帶寬實(shí)時(shí)查表確定;yf(n)為n時(shí)刻對(duì)位移信號(hào)y(n)的濾波處理值。
3 仿真分析
3.1 有限元模型
轉(zhuǎn)子-軸承-AMA系統(tǒng)模型主要參數(shù)見(jiàn)表1,根據(jù)第1節(jié)系統(tǒng)建模公式建立有限元模型,將整個(gè)系統(tǒng)劃分為11個(gè)Timoshenko梁?jiǎn)卧鐖D5所示。設(shè)不平衡力作用在圓盤(pán)(9#節(jié)點(diǎn))處,平行不對(duì)中力作用在聯(lián)軸器(3#節(jié)點(diǎn))處,主動(dòng)電磁控制力施加于AMA(7#節(jié)點(diǎn))處。

圖5 轉(zhuǎn)子-軸承-AMA系統(tǒng)模型Fig.5 Model of rotor-bearing-AMA system

表1 轉(zhuǎn)子-軸承-AMA系統(tǒng)模型主要參數(shù)
3.2 算法控制效果
仿真過(guò)程中,取系統(tǒng)采樣頻率fs=10 kHz,轉(zhuǎn)
子轉(zhuǎn)頻f=100 Hz,比例增益KP=4×107,微分增益KD=10,基于MATLAB仿真分析得到AMA 7#節(jié)點(diǎn)控制前后的軸心軌跡和頻域曲線如圖6所示:1)在控制器激發(fā)后,經(jīng)過(guò)衰減振蕩(收斂過(guò)程),軸心軌跡更趨向坐標(biāo)原點(diǎn)且保持穩(wěn)定;2)振幅減小,工頻和二倍頻成分得到顯著抑制。說(shuō)明該算法對(duì)不平衡-不對(duì)中耦合振動(dòng)具有較好的抑制效果。

圖6 AMA 7#節(jié)點(diǎn)控制前后的仿真結(jié)果Fig.6 Simulation results before and after AMA 7#node control
4 試驗(yàn)驗(yàn)證
建立轉(zhuǎn)子-軸承-AMA系統(tǒng)試驗(yàn)臺(tái)如圖7所示, 1#,2#測(cè)點(diǎn)分別裝有2套電渦流位移傳感器,3#,4#測(cè)點(diǎn)分別裝有1套電渦流位移傳感器。可傾瓦滑動(dòng)軸承五瓦均布,且采用瓦塊上承載、中心支承的方式。系統(tǒng)采樣頻率fs為10.24 kHz,其他參數(shù)同表1。

圖7 轉(zhuǎn)子-軸承-AMA系統(tǒng)試驗(yàn)臺(tái)Fig.7 Test rig of rotor-bearing-AMA system
(16)
式中:FG為AMA提供的y方向支承力。偏置電流i0=1 A,試驗(yàn)中取im=0.1 A。
在多個(gè)轉(zhuǎn)速下對(duì)轉(zhuǎn)子振動(dòng)進(jìn)行實(shí)時(shí)主動(dòng)抑制以驗(yàn)證所提算法對(duì)轉(zhuǎn)子不平衡和不對(duì)中振動(dòng)抑制的有效性。采用試湊法選取PD控制器參數(shù):比例增益KPx=KPy= 2×104,微分增益KDx=KDy=15。得到1#測(cè)點(diǎn)y方向多轉(zhuǎn)速控制前后振幅如圖8所示,該算法對(duì)不同轉(zhuǎn)速的轉(zhuǎn)子振動(dòng)均有較好的抑制效果,各轉(zhuǎn)速下轉(zhuǎn)子振幅降低幅度在43.8%~56.0%之間。當(dāng)轉(zhuǎn)速大于1 350 r/min時(shí),振動(dòng)抑制率減小,說(shuō)明PD控制算法魯棒性不強(qiáng)。
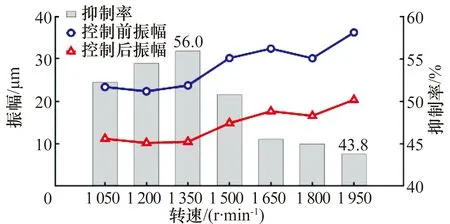
圖8 1#測(cè)點(diǎn)y方向振幅多轉(zhuǎn)速控制對(duì)比圖Fig.8 Comparison diagram of amplitude multi speed controlin y direction of 1# measuring point
在轉(zhuǎn)速為1 950 r/min時(shí)各測(cè)點(diǎn)試驗(yàn)結(jié)果如圖9所示, 由圖9a、圖9b、圖9c可知在第10 s施加電磁控制力后,轉(zhuǎn)子-軸承-AMA系統(tǒng)各測(cè)點(diǎn)振幅均得到抑制,說(shuō)明了該算法的有效性,由圖9d可知經(jīng)陷波濾波器濾波后噪聲現(xiàn)象得到明顯抑制。

圖9 各測(cè)點(diǎn)試驗(yàn)結(jié)果Fig.9 Test results of each measuring point
轉(zhuǎn)速為1 950 r/min時(shí)1#測(cè)點(diǎn)y方向頻域瀑布圖如圖10所示:1)陷波濾波器對(duì)噪聲的濾波效果顯著,各頻段內(nèi)噪聲明顯,雖然每個(gè)頻率下噪聲都不大,但累計(jì)之后對(duì)控制效果影響較大,這也是采用陷波濾波器的原因。2)在惡劣工作環(huán)境下轉(zhuǎn)子系統(tǒng)噪聲明顯,在第10 s施加控制后,振動(dòng)一二倍頻成分得到抑制,說(shuō)明該算法能有效抑制不平衡和不對(duì)中故障引起的振動(dòng)。

圖10 1#測(cè)點(diǎn)y方向瀑布圖Fig.10 Waterfall diagram in y direction of1# measuring point
5 結(jié)論
針對(duì)轉(zhuǎn)子-軸承-AMA系統(tǒng)的不平衡-不對(duì)中耦合故障,設(shè)計(jì)了基于AMA的PD控制算法,建立控制系統(tǒng)仿真模型。在試驗(yàn)中設(shè)計(jì)陷波濾波器,以振動(dòng)的工頻和二倍頻成分作為耦合故障的靶向抑制目標(biāo),對(duì)轉(zhuǎn)子振動(dòng)進(jìn)行主動(dòng)抑制試驗(yàn)。根據(jù)仿真和試驗(yàn)結(jié)果得出以下結(jié)論:

1)從時(shí)域和頻域控制結(jié)果來(lái)看,離散PD控制器對(duì)多自由度、多轉(zhuǎn)速運(yùn)動(dòng)轉(zhuǎn)子軸系的不平衡-不對(duì)中耦合振動(dòng)有較好抑制效果。
2)針對(duì)靶向抑制所選用的離散PD控制器結(jié)構(gòu)簡(jiǎn)單,魯棒性較差,隨轉(zhuǎn)速增大,其振動(dòng)抑制率可能會(huì)減小。
3)陷波濾波器能有效提取相應(yīng)倍頻,抑制振動(dòng)信號(hào)的噪聲,且可根據(jù)實(shí)時(shí)轉(zhuǎn)速改變陷波頻率,滿(mǎn)足多轉(zhuǎn)速運(yùn)行的需求。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
