基于滑模控制的接觸網(wǎng)/受電弓系統(tǒng)抗振動分析
2022-06-08 01:41:42王明雨
中國新技術(shù)新產(chǎn)品 2022年4期
王明雨
(南昌鐵路勘測設(shè)計院有限責(zé)任公司,江西 南昌 330000)
1 接觸網(wǎng)/受電弓系統(tǒng)的研究
接觸網(wǎng)和受電弓作為鐵路中的重要設(shè)備,一直受到眾多學(xué)者和從業(yè)人員的關(guān)注。自20 世紀90 年代起,眾多學(xué)者針對接觸網(wǎng)/受電弓組成的耦合系統(tǒng)進行了大量的研究。文獻[6]結(jié)合CH160-0 模型,建立了接觸網(wǎng)有限元模型和受電弓運動微分方程,最后推導(dǎo)出弓/網(wǎng)系統(tǒng)的耦合動力學(xué)模型。文獻[7]設(shè)計一種可實時進行模糊運算、推理的模糊控制器,實現(xiàn)了弓/網(wǎng)混合模擬系統(tǒng)中液壓伺服系統(tǒng)的模糊控制。文獻[8]采用負馳度的方法對接觸網(wǎng)進行重構(gòu),進一步優(yōu)化了弓/網(wǎng)系統(tǒng)的動力學(xué)計算。
2 接觸網(wǎng)/受電弓系統(tǒng)的2個重要指標
在弓/網(wǎng)系統(tǒng)中,受電弓直接和接觸線相接觸從而獲取電流,因此受流質(zhì)量直接影響了鐵路安全運行。文獻針對單弓和雙弓作用下接觸網(wǎng)的穩(wěn)定性進行對比,最后得出了雙弓間距對機車受流質(zhì)量的影響,對機車雙弓間距提出了具體的要求。受電弓的抬升力對接觸懸掛產(chǎn)生機械作用,使接觸線升高。升高過低,壓力值偏小,受流時容易出現(xiàn)離線并產(chǎn)生電弧,從而損壞接觸線和弓頭,影響正常的受流。升高過高,壓力值偏大,受電弓和接觸線的機械磨耗也越大,影響設(shè)備的使用壽命,也會使接觸線過分升高,影響絕緣,甚至出現(xiàn)刮弓事故。同時,受電弓沿著接觸線高速滑動會產(chǎn)生振動,振動會導(dǎo)致接觸線抬升、弓/網(wǎng)之間的動態(tài)接觸壓力發(fā)生變化等問題,在振動超過一定范圍后,弓/網(wǎng)系統(tǒng)會產(chǎn)生離線等現(xiàn)象,也嚴重威脅著列車的安全運行。因此接觸線的動態(tài)抬升位移和弓/網(wǎng)之間的動態(tài)接觸壓力是衡量鐵路安全運行的2 個重要指標。
3 如何抑制接觸網(wǎng)/受電弓系統(tǒng)的振動
為了抑制振動,可以從受電弓和接觸網(wǎng)等多個方面進行研究。在受電弓方面,選擇歸算質(zhì)量更小、具有阻尼和緩沖裝置的受電弓可以減少因為受電弓而產(chǎn)生的振動問題。在接觸網(wǎng)方面,作為設(shè)計人員,一般會降低接觸線的坡度、采用彈性鏈型懸掛和使用彈性較高的線索等方式降低接觸線的振動。但是在列車高速運行弓/網(wǎng)系統(tǒng)劇烈摩擦的情況下,振動現(xiàn)象是不可避免的,因此在設(shè)計中,會允許弓/網(wǎng)之間的動態(tài)接觸壓力和動態(tài)抬升位移在一定范圍內(nèi)波動,一般接觸壓力在50N~200N,抬升位移限制在100mm~200mm,從而保證列車的正常受流。值得關(guān)注的是,在仿真實驗中,經(jīng)常會遇到弓/網(wǎng)之間動態(tài)接觸壓力為0的情況,該情況說明弓/網(wǎng)之間存在離線等問題,須避免。
4 滑模控制抑制振動的原理
在列車運行中,接觸線的動態(tài)抬升位移與弓/網(wǎng)之間的動態(tài)接觸壓力是隨著時間、跨距等因素變化的,在一個跨距內(nèi)不同位置會出現(xiàn)不同的振動大小,因此分析弓/網(wǎng)之間的動態(tài)變化對抑制振動具有非常重要的意義。滑模控制理論具有快速響應(yīng)、對外界擾動變化不靈敏的特點,大量應(yīng)用在機械、航天、交通等領(lǐng)域。通過理想值與實際值的誤差作為滑模面函數(shù)是常用的滑模控制方法,該文將滑模控制應(yīng)用到受電弓伺服控制系統(tǒng)中,將弓/網(wǎng)系統(tǒng)的理想動態(tài)位移與實際動態(tài)位移之差作為滑模控制函數(shù),從而控制受電弓的升降,減少接觸線的動態(tài)抬升位移,最終實現(xiàn)抗振動的效果。
5 預(yù)備知識
5.1 接觸網(wǎng)/受電弓模型
受電弓是一個復(fù)雜的機械機構(gòu),它包括弓頭、上框架、推桿、平衡桿等構(gòu)件,各個構(gòu)件之間通過鉸鏈座鉸接,各鉸接處還裝有滾動軸承等以此控制受電弓的上升與下降。在通常的研究中,學(xué)者們會把受電弓分為3 個部分:弓頭、上框架、下框架。弓頭是機車和接觸網(wǎng)接觸獲取電流的裝置,弓頭會隨著接觸線的升高或降低運動,實現(xiàn)弓/網(wǎng)之間接觸壓力的動態(tài)變化,因此弓頭的質(zhì)量好壞對機車能否正常、安全受流至關(guān)重要。上框架、下框架實現(xiàn)了受電弓的機械運動,它們與弓頭之間相互絕緣,通過傳動機構(gòu)、伺服電機等實現(xiàn)對弓頭位置的控制。
相對弓/網(wǎng)之間的動態(tài)接觸壓力,靜態(tài)接觸壓力對弓/網(wǎng)系統(tǒng)的穩(wěn)定性也至關(guān)重要。靜態(tài)接觸壓力是指機車未運動之前,受電弓上升與接觸線相接觸,這時,受電弓對接觸線會存在一個接觸壓力,該壓力即為靜態(tài)接觸壓力。靜態(tài)接觸壓力偏大,弓/網(wǎng)之間接觸磨損就越大,器械的使用壽命就會變短;壓力偏小,受電弓無法和接觸網(wǎng)實現(xiàn)有效的接觸,從而影響機車的安全運行,因此討論弓/網(wǎng)之間的接觸壓力對抑制振動具有重要意義。
在研究接觸網(wǎng)/受電弓時,首先需要把相關(guān)設(shè)備模型化,便于研究。該文以DSA250 型受電弓為研究對象,將DSA250型受電弓簡化為三質(zhì)量模型,如圖1 所示。
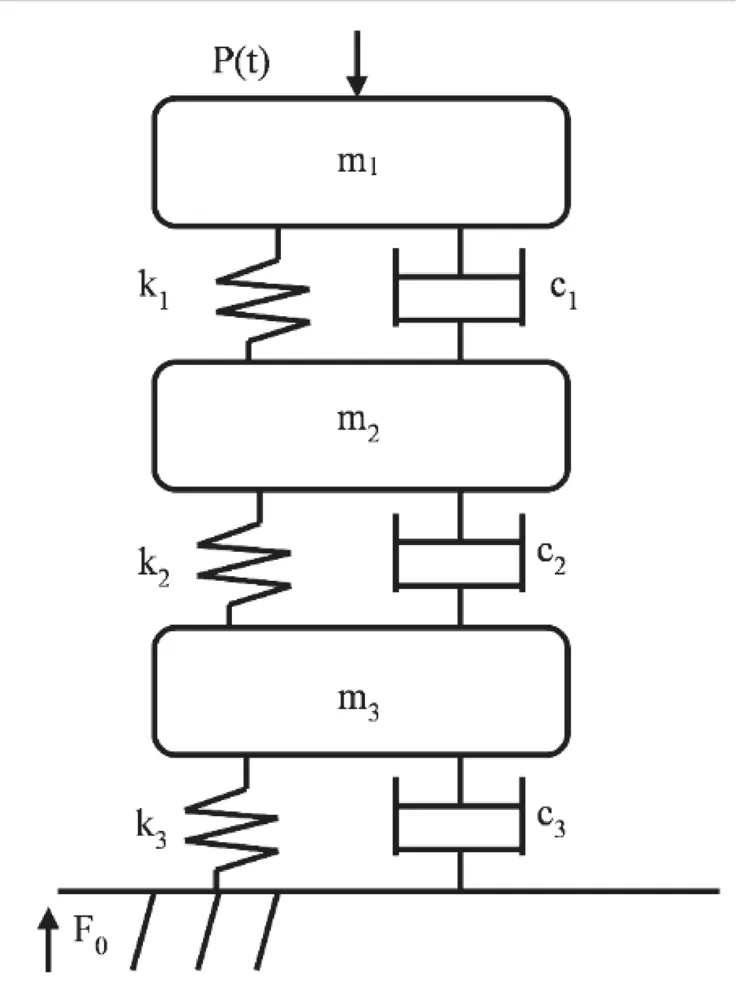
圖1 受電弓物理模型
受電弓的阻尼可以維持弓/網(wǎng)之間的穩(wěn)定性,確保受電弓處于相對平穩(wěn)的狀態(tài),從而保證機車的受流質(zhì)量。
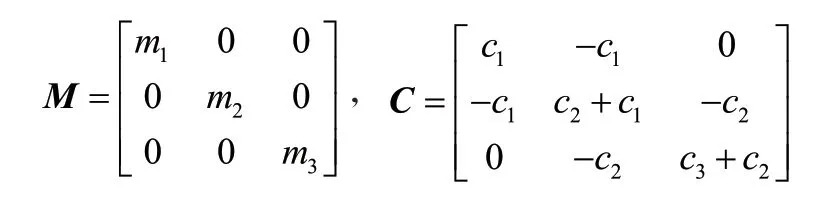
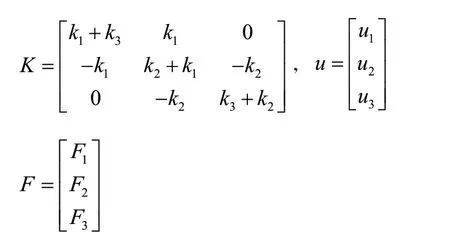
5.2 弓/網(wǎng)系統(tǒng)動力學(xué)平衡模型
弓/網(wǎng)系統(tǒng)是由接觸網(wǎng)和受電弓組成,需要對接觸網(wǎng)和受電弓進行建模,統(tǒng)一到同一個數(shù)學(xué)模型中,以此來描述弓/網(wǎng)系統(tǒng)的運動狀態(tài)。采用文獻[9]中給出的弓/網(wǎng)系統(tǒng)的動力學(xué)平衡方程組:


6 滑模控制協(xié)議設(shè)計
滑模控制方法對外界干擾不靈敏,可以降低外界因素對系統(tǒng)的影響。一般情況下需要先設(shè)計滑模誤差函數(shù),然后以誤差函數(shù)為基礎(chǔ)設(shè)計滑模面函數(shù),最后設(shè)計滑模控制協(xié)議使系統(tǒng)運動到滑模面上,然后保持在滑模面附近運動。
在設(shè)計滑模控制協(xié)議之前,首先設(shè)計滑模誤差函數(shù)。以弓/網(wǎng)系統(tǒng)弓頭、上框架、下框架的實際動態(tài)位移和設(shè)計的理想動態(tài)位移之差作為誤差函數(shù)。該誤差函數(shù)如公式(2)所示。

式 中:(t)=[(t)(t)(t)],(t),(t),(t)分別表示弓頭、上框架、下框架在t時刻的誤差函數(shù)。(t)=[(t)(t)(t)],(t),(t),(t)分別表示弓頭、上框架、下框架在t時刻的實際動態(tài)抬升位移,(t)=[(t)(t)(t)],(t),(t),(t)分別表示弓頭、上框架、下框架在t時刻的理想動態(tài)抬升位移。
以式(2)中的誤差函數(shù)設(shè)計滑模面函數(shù),如公式(3)所示。

式中:(t)是設(shè)計弓/網(wǎng)系統(tǒng)的滑模面函數(shù),為增益函數(shù)。
接下來以滑模面函數(shù)式(3)為基礎(chǔ)設(shè)計滑模控制函數(shù),該控制函數(shù)將會“驅(qū)使”弓/網(wǎng)系統(tǒng)的動力學(xué)方程組式(1)沿著式(3)中設(shè)計的滑模面函數(shù)運動,最終收斂到滑模面函數(shù)(t)=0 附近,之后維持在滑模面函數(shù)(t)=0 附近運動,從而實現(xiàn)弓/網(wǎng)系統(tǒng)的抗振動。設(shè)計滑模控制函數(shù)如公式(4)所示。

式中:(t)為設(shè)計的滑模控制函數(shù),h 為采樣周期,、以及為增益函數(shù),sgn 為符號函數(shù),[-sgn((t))-δ(t)]項為切換函數(shù)。
從滑模控制函數(shù)式(4)中可以看出,滑模控制函數(shù)以弓/網(wǎng)系統(tǒng)弓頭、上框架、下框架的實際動態(tài)抬升位移與理想動態(tài)抬升位移之差為基礎(chǔ),采用符號函數(shù)sgn 控制弓/網(wǎng)系統(tǒng)的運動狀態(tài),“驅(qū)使”系統(tǒng)沿著設(shè)計的滑模面函數(shù)式(3)做上下切換運動,從而維持系統(tǒng)的運動狀態(tài),實現(xiàn)接觸網(wǎng)的實際動態(tài)抬升位移向著理想的抬升位移運動,最終達到抗振動的效果。
7 仿真分析
該文在MATLAB/Simulink 平臺中對所提算法進行驗證。仿真中接觸網(wǎng)的跨距為3 跨,接觸網(wǎng)總長180m,導(dǎo)高1.4m,單跨吊弦數(shù)目為7,采用已知數(shù)據(jù)的接觸線和承力索組合,仿真列車時速為160km/h。選用DSA250 型受電弓參數(shù)為=7.51kg,=5.855kg,=4.645kg,==0,=70(N·s·m),=8380(N·m),=6200(N·m),=80(N·m),=70N。
選用承力索、受電弓為THJ95+CTHA120 組合模型,接觸網(wǎng)基本參數(shù)見表1。控制增益函數(shù)=1.5,采樣周期=0.1s,=2,=5,=1,弓網(wǎng)系統(tǒng)節(jié)點在時刻的理想位移量[60 0 0],單位是mm。在仿真中,仿真處未采用滑模控制方法情況下常規(guī)接觸網(wǎng)和采用滑模控制函數(shù)式(4)兩種情況下的動態(tài)抬升位移,通過兩種情況下的接觸網(wǎng)動態(tài)抬升位移做對比,從而體現(xiàn)出滑模控制函數(shù)式(4)的抗振動特性。

表1 仿真接觸網(wǎng)系統(tǒng)參數(shù)
接觸線的動態(tài)抬升位移和弓/網(wǎng)之間的動態(tài)接觸壓力仿真如圖2 所示。
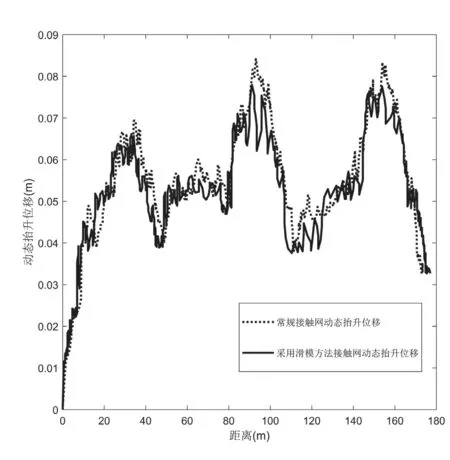
圖2 常規(guī)接觸網(wǎng)動態(tài)抬升位移與采用滑模控制接觸網(wǎng)動態(tài)抬升位移對比
根據(jù)圖2 可知,相較于常規(guī)的接觸網(wǎng)動態(tài)抬升位移,采用滑模控制方法的接觸網(wǎng)動態(tài)抬升位移較小一些,這說明滑模控制方法對弓/網(wǎng)系統(tǒng)的振動實現(xiàn)了抑制效果。接觸線的動態(tài)抬升位移是以跨距為單位呈一定周期性變化,在支柱定位點附近動態(tài)抬升位移較小,在跨中附近動態(tài)抬升位移較大。同時也可以看出在第2、3 個跨距中,動態(tài)抬升位移相較于第1 個跨距較大,這是因為在第1 個跨距內(nèi)產(chǎn)生的振動沿著接觸線傳播對第2、3 個跨距產(chǎn)生影響。從圖3 中可知,弓/網(wǎng)系統(tǒng)的動態(tài)接觸壓力在40N~150N 變化,并且在仿真中沒有出現(xiàn)動態(tài)接觸壓力為0 的情況,這說明弓/網(wǎng)之間沒有產(chǎn)生離線現(xiàn)象,接觸狀態(tài)良好。
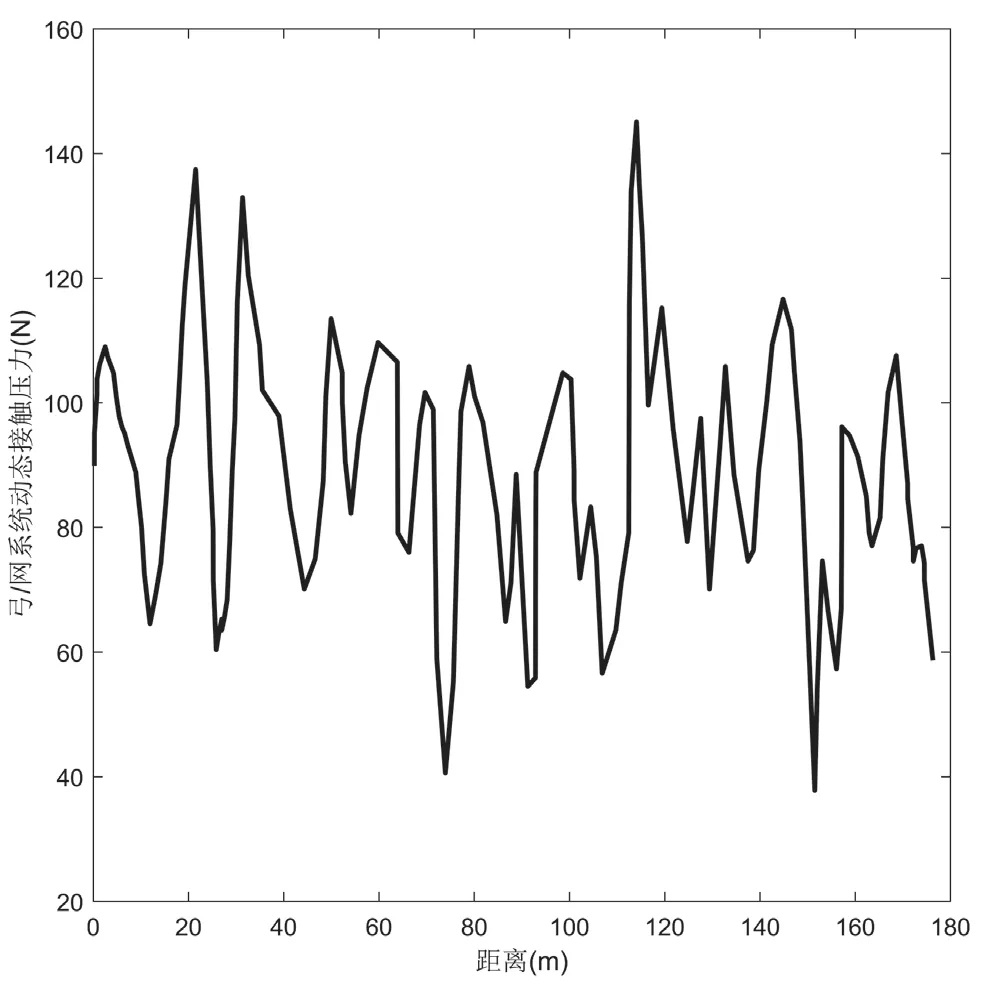
圖3 弓/網(wǎng)系統(tǒng)動態(tài)接觸壓力
8 結(jié)論
針對弓/網(wǎng)系統(tǒng)產(chǎn)生的振動問題,該文采用抗外界擾動較強的滑模控制方法。首先,采用接觸網(wǎng)的理想抬升位移和實際抬升位移之差作為滑模面的誤差函數(shù),隨后根據(jù)切換協(xié)議設(shè)計了滑模控制函數(shù)。其次,通過MATLAB/Simulink 平臺對所提出算法的有效性進行了驗證,結(jié)果表明接觸線的動態(tài)抬升位移有所下降,該控制協(xié)議對弓/網(wǎng)系統(tǒng)的抗振動起到了一定的效果。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
