光伏發(fā)電最大功率點(diǎn)跟蹤Boost變換器動(dòng)力學(xué)特性
2022-06-05 06:27:14趙世彬賈春華
關(guān)鍵詞:系統(tǒng)
陶 慧,趙世彬,賈春華
(河南理工大學(xué)電氣工程與自動(dòng)化學(xué)院,焦作 454000)
光伏發(fā)電是利用太陽(yáng)能電池的光生效應(yīng)將太陽(yáng)能轉(zhuǎn)化為電能的一種發(fā)電形式[1]。為了提高光伏電池的轉(zhuǎn)換效率,需要采用最大功率點(diǎn)跟蹤MPPT(maximum power point tracking)技術(shù)。目前一般采用Boost變換器作為MPPT控制器,通過(guò)控制開(kāi)關(guān)管通斷,調(diào)節(jié)其占空比,使光伏電池穩(wěn)定工作在最大功率點(diǎn)[2]。
對(duì)于光伏發(fā)電Boost變換器的研究,主要集中在對(duì)MPPT算法的改進(jìn)。傳統(tǒng)MPPT算法主要有恒定電壓法、電導(dǎo)增量法和擾動(dòng)觀察法[3-4]。文獻(xiàn)[5-7]基于以上傳統(tǒng)MPPT算法提出了變步長(zhǎng)擾動(dòng)觀察法、改進(jìn)型變步長(zhǎng)電導(dǎo)增量法、改進(jìn)型模糊控制以及粒子群優(yōu)化等算法來(lái)實(shí)現(xiàn)光伏電池MPPT,提高了系統(tǒng)的響應(yīng)速度和控制精度,但上述MPPT算法的數(shù)學(xué)模型比較復(fù)雜,不便于系統(tǒng)的非線性分析;文獻(xiàn)[8]通過(guò)保證負(fù)載阻值和光伏電池內(nèi)阻相等,為實(shí)現(xiàn)負(fù)載功率處于最大值提供了簡(jiǎn)單的思路,但當(dāng)外界環(huán)境發(fā)生變化引起光伏電池內(nèi)阻改變時(shí),無(wú)法準(zhǔn)確跟蹤到最大功率點(diǎn)。本文將Boost變換器和負(fù)載結(jié)合起來(lái),視為等效負(fù)載,控制Boost變換器開(kāi)關(guān)管的通斷,使光伏電池阻抗和等效負(fù)載相匹配,可以達(dá)到最大功率點(diǎn)跟蹤的目的,而且實(shí)現(xiàn)簡(jiǎn)單。
作為一種典型的電力電子電路,光伏發(fā)電系統(tǒng)具有強(qiáng)非線性特性。研究其非線性動(dòng)力學(xué)行為,可以確定系統(tǒng)的穩(wěn)定工作域,提高光伏發(fā)電系統(tǒng)的效率和穩(wěn)定性,對(duì)實(shí)際工程有重要的指導(dǎo)意義。文獻(xiàn)[9]建立了電壓反饋型Boost變換器PD控制下的離散模型,研究了PD控制器參數(shù)對(duì)系統(tǒng)穩(wěn)定性的影響;文獻(xiàn)[10]研究了電流控制型Boost變換器,發(fā)現(xiàn)在一定參數(shù)作用下,系統(tǒng)會(huì)出現(xiàn)倍周期分岔現(xiàn)象;文獻(xiàn)[11]研究了電壓模式控制Boost變換器的切分岔和陣發(fā)混沌等不穩(wěn)定現(xiàn)象,為變換器參數(shù)的優(yōu)化提供了重要指導(dǎo)意義;文獻(xiàn)[12]基于離散法,建立了交錯(cuò)并聯(lián)Boost變換器的離散映射模型,研究了電流反饋增益和電壓反饋增益對(duì)系統(tǒng)動(dòng)力學(xué)特性的影響;文獻(xiàn)[13]推導(dǎo)了兩級(jí)式光伏并網(wǎng)逆變器的狀態(tài)方程,研究了前后級(jí)電路內(nèi)部參數(shù)的取值對(duì)系統(tǒng)非線性行為的影響,避免了混沌引起的穩(wěn)定性和魯棒性變差等問(wèn)題,為實(shí)際光伏逆變器的設(shè)計(jì)提供了重要的理論依據(jù)。但目前對(duì)Boost電路和光伏發(fā)電系統(tǒng)非線性的研究,沒(méi)有考慮最大功率點(diǎn)跟蹤的控制要求。此外,光伏電池結(jié)構(gòu)復(fù)雜,等效數(shù)學(xué)模型主要有單二極管模型、雙二極管模型和3個(gè)二極管模型等[14]。但多數(shù)學(xué)者對(duì)光伏發(fā)電系統(tǒng)進(jìn)行非線性研究時(shí),直接將光伏電池等效為一個(gè)電動(dòng)勢(shì),忽略了光伏電池內(nèi)部參數(shù)對(duì)其工作特性的影響。為了反映光伏電池的真實(shí)特性,本文將光伏電池模型等效為直流電壓源。該模型便于分析當(dāng)外界環(huán)境變化引起光伏電池內(nèi)阻改變時(shí)其內(nèi)阻對(duì)系統(tǒng)的影響。
本文從非線性動(dòng)力學(xué)角度出發(fā),來(lái)揭示光伏發(fā)電MPPT Boost變換器的動(dòng)力學(xué)特性。首先給出了光伏電池的等效電壓源模型和基于阻抗匹配的MPPT原理,分析系統(tǒng)的工作原理并建立其數(shù)學(xué)模型。然后進(jìn)行數(shù)值仿真,利用分岔圖、時(shí)域波形以及相圖深入研究系統(tǒng)的非線性行為,并根據(jù)系統(tǒng)狀態(tài)平均方程的雅可比矩陣特征值,對(duì)系統(tǒng)穩(wěn)定性進(jìn)行理論分析,確定系統(tǒng)各參數(shù)的穩(wěn)定域和穩(wěn)定邊界。最后在Matlab/Simulink環(huán)境下進(jìn)行仿真驗(yàn)證。
1 光伏電池等效模型及MPPT實(shí)現(xiàn)
1.1 光伏電池模型
光伏電池單二極管電路模型[14]及其等效模型如圖1所示。

圖1 光伏電池電路模型Fig.1 Circuit models of photovoltaic cell
實(shí)際工程中,單個(gè)光伏電池產(chǎn)生的電壓很小,因此需要許多光伏電池通過(guò)串、并聯(lián)組合得到期望的光伏電池陣列,其輸出特性方程為
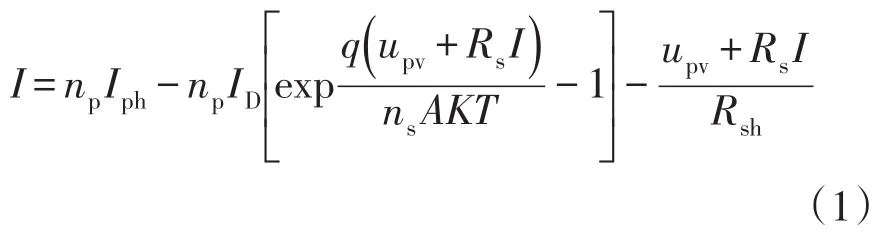
式中:I、Iph和ID分別為光伏電池的輸出電流、光電流和二極管反向飽和電流;upv為光伏電池輸出電壓;ns和np分別為光伏電池串聯(lián)和并聯(lián)的個(gè)數(shù);q為電子的電荷量;A為p-n結(jié)常數(shù);K為玻爾茲曼常數(shù);T為光伏電池溫度;Rsh為光伏電池并聯(lián)電阻;Rs為光伏電池串聯(lián)電阻。
由式(1)可知,光伏電池I-U特性方程是一個(gè)非線性超越函數(shù)。在研究光伏發(fā)電系統(tǒng)的動(dòng)力學(xué)特性時(shí),若采用單二極管模型作為光伏電池等效模型,不便于對(duì)系統(tǒng)的狀態(tài)微分方程進(jìn)行求解。本文根據(jù)已知的光伏電池開(kāi)路電壓和短路電流等參數(shù),利用戴維南定理,將其等效為電動(dòng)勢(shì)和內(nèi)阻串聯(lián),如圖1(b)所示,能更準(zhǔn)確地反映光伏電池的真實(shí)特性,并且便于從非線性角度分析光伏發(fā)電系統(tǒng)的動(dòng)力學(xué)特性。其中等效電動(dòng)勢(shì)E為光伏電池開(kāi)路電壓;Req為光伏電池等效電阻,可由開(kāi)路電壓和短路電流求得。
1.2 光伏電池MPPT
為了提高光伏電池的轉(zhuǎn)換效率,最大限度地將太陽(yáng)能轉(zhuǎn)化為電能,應(yīng)該使光伏電池工作在最大功率點(diǎn)處。文獻(xiàn)[8]本著負(fù)載電阻和光伏陣列等效內(nèi)阻相等的原則進(jìn)行負(fù)載匹配,使光伏電池工作在最大輸出狀態(tài)。其簡(jiǎn)化線性電路如圖2所示。
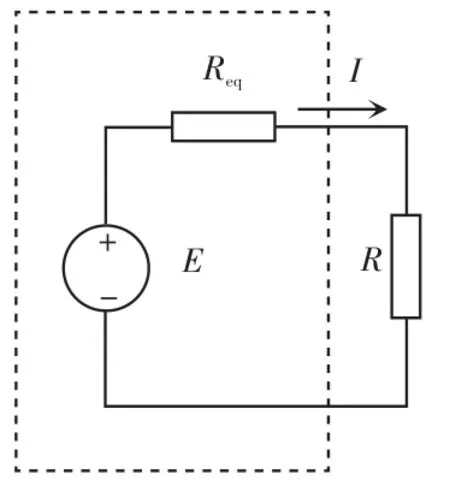
圖2 簡(jiǎn)單線性電路Fig.2 Simplified linear circuit
圖2中,R為負(fù)載,其消耗的功率可表示為

式(2)對(duì)負(fù)載R求導(dǎo),可得

2 系統(tǒng)模型與工作原理
光伏發(fā)電MPPT Boost變換器原理如圖3所示。系統(tǒng)分為主電路和控制系統(tǒng)兩部分,其中:主電路包括等效電動(dòng)勢(shì)E、光伏電池等效內(nèi)阻Req、濾波電容Cf、Boost電路以及阻性負(fù)載R;控制系統(tǒng)包含光伏電池輸出電壓外環(huán)和電感電流內(nèi)環(huán)。電壓外環(huán)采用比例積分控制,目的是控制光伏電池輸出電壓upv穩(wěn)定在E/2,使光伏電池可以穩(wěn)定工作在最大功率點(diǎn)處;電流內(nèi)環(huán)采用比例控制,通過(guò)反饋電感電流來(lái)提高系統(tǒng)的動(dòng)態(tài)響應(yīng)特性。工作原理如下:首先,將光伏電池輸出電壓upv與參考電壓Uref比較,通過(guò)電壓外環(huán)控制器得到電流參考信號(hào)iref;然后將iref和電感電流iL經(jīng)電流內(nèi)環(huán)控制器運(yùn)算后得到控制電壓ucon,經(jīng)峰值為3的鋸齒波調(diào)制后形成PWM信號(hào),控制開(kāi)關(guān)管S的通斷。
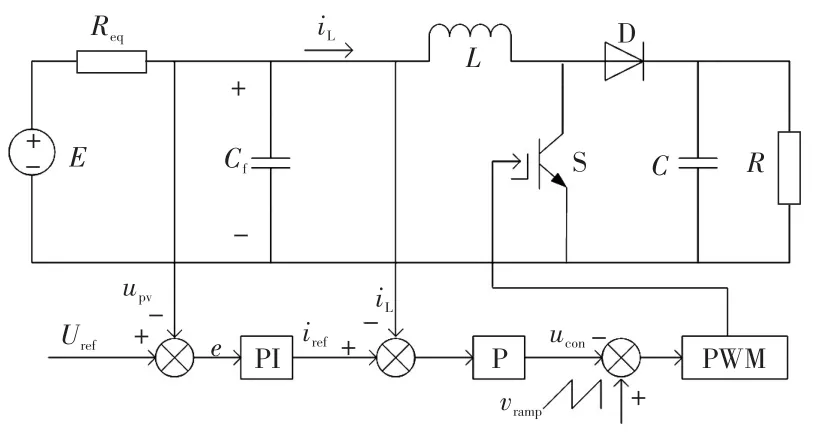
圖3 系統(tǒng)原理Fig.3 Schematic of system
圖3中,鋸齒波信號(hào)為

式中:VL和VH分別為鋸齒波信號(hào)的下飽和邊界值和上飽和邊界值;t為時(shí)間;T為開(kāi)關(guān)周期。
控制電壓ucon可表示為

式中:Kp為電壓外環(huán)比例系數(shù);Ki為電壓外環(huán)積分系數(shù);Kc為電流內(nèi)環(huán)比例系數(shù);α為電壓反饋系數(shù);β為電流反饋系數(shù);iL為電感電流;Uref為參考電壓。
通過(guò)比較ucon和vramp可以確定開(kāi)關(guān)管的運(yùn)行狀態(tài)。當(dāng)vramp>ucon時(shí),S=1,開(kāi)關(guān)管S導(dǎo)通,D關(guān)斷;當(dāng)vramp<ucon時(shí),S=0,開(kāi)關(guān)管S關(guān)斷,D導(dǎo)通。
每個(gè)狀態(tài)對(duì)應(yīng)的狀態(tài)方程表示為

式中:L為Boost電路電感;C為Boost電路電容;Cf為濾波電容。
結(jié)合式(5)~式(9),可得整個(gè)電路系統(tǒng)狀態(tài)方程為

3 數(shù)值仿真研究
基于式(10)得到的系統(tǒng)狀態(tài)微分方程,利用迭代法對(duì)系統(tǒng)進(jìn)行數(shù)值仿真研究。數(shù)值仿真采用的電路默認(rèn)參數(shù)如表1所示。
表1 數(shù)值仿真采用的電路默認(rèn)參數(shù)Tab.1 Default circuit parameters used in numerical simulation
目前,辨識(shí)混沌運(yùn)動(dòng)的方法主要有:直接觀測(cè)法、龐加萊截面法、相圖法、分岔圖法以及Lyapunov指數(shù)法。其中,分岔圖是以系統(tǒng)的某一參數(shù)為橫坐標(biāo)、某一狀態(tài)變量為縱坐標(biāo),通過(guò)數(shù)值仿真迭代計(jì)算方程得到的,可以直觀地反映系統(tǒng)隨參數(shù)變化的動(dòng)力學(xué)行為。系統(tǒng)周期運(yùn)動(dòng)狀態(tài)與分岔圖中點(diǎn)的個(gè)數(shù)相對(duì)應(yīng),當(dāng)分岔圖中存在無(wú)數(shù)個(gè)位置不重復(fù)的點(diǎn)時(shí),則說(shuō)明系統(tǒng)處于混沌狀態(tài)。
本文通過(guò)分岔圖法,分別研究當(dāng)光伏電池等效內(nèi)阻Req、電動(dòng)勢(shì)E、電壓外環(huán)比例系數(shù)Kp以及濾波電容Cf改變時(shí)對(duì)系統(tǒng)的穩(wěn)定性的影響。
3.1 以Req為分岔參數(shù)
光伏電池等效內(nèi)阻的變化會(huì)影響其輸出電壓,首先研究光伏電池內(nèi)阻變化時(shí)系統(tǒng)的非線性行為。圖4給出了當(dāng)其他參數(shù)取默認(rèn)值,系統(tǒng)隨Req變化時(shí)光伏電池輸出電壓upv的分岔圖。通過(guò)觀察分岔圖可以看出:當(dāng)Req<0.656 Ω時(shí),系統(tǒng)處于混沌狀態(tài);當(dāng)Req>0.656 Ω時(shí),系統(tǒng)穩(wěn)定運(yùn)行;約在Req=0.656 Ω時(shí),系統(tǒng)處于臨界穩(wěn)定狀態(tài)。
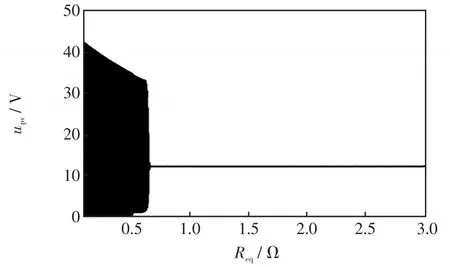
圖4 系統(tǒng)隨Req變化時(shí)upv的分岔圖Fig.4 Bifurcation diagram ofupvupv asReqvaries
由文獻(xiàn)[14]可知:當(dāng)環(huán)境溫度不變時(shí),光照強(qiáng)度與Req成反比,與光伏電池最大輸出功率成正比;當(dāng)光照強(qiáng)度不變時(shí),Req和最大輸出功率均會(huì)隨著環(huán)境溫度的增大而減小。由此可見(jiàn),當(dāng)外界環(huán)境溫度或光照強(qiáng)度增大使Req小于其臨界穩(wěn)定值時(shí),系統(tǒng)處于混沌狀態(tài);但當(dāng)環(huán)境溫度降低時(shí),不僅會(huì)增大光伏電池最大輸出功率,同時(shí)還能保證內(nèi)阻Req在其穩(wěn)定域內(nèi)工作。
3.2 以E為分岔參數(shù)
考慮到Boost變換器的輸入電壓是由光伏電池產(chǎn)生的,等效電動(dòng)勢(shì)E隨環(huán)境溫度和光照強(qiáng)度等因素的改變而發(fā)生較大范圍的變化。以E為分岔參數(shù),研究upv的動(dòng)力學(xué)行為,對(duì)實(shí)際工程設(shè)計(jì)也有重要意義。圖5給出了參數(shù)E變化范圍為10~30 V時(shí)upv的分岔圖。可見(jiàn),當(dāng)E<13.96 V時(shí),系統(tǒng)穩(wěn)定運(yùn)行在周期1;在13.96 V<E<17.68 V時(shí),系統(tǒng)運(yùn)行在不穩(wěn)定狀態(tài);約在E=17.68 V處,系統(tǒng)發(fā)生了由混沌狀態(tài)到穩(wěn)定狀態(tài)的轉(zhuǎn)變。因此,在實(shí)際工程中,為保證系統(tǒng)穩(wěn)定運(yùn)行,E的取值應(yīng)大于17.68 V。
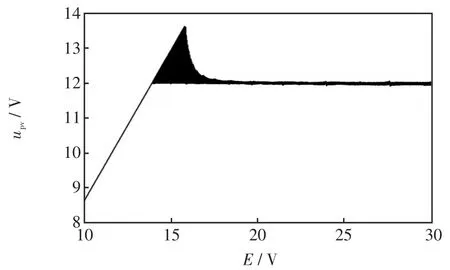
圖5 系統(tǒng)隨E變化時(shí)upv的分岔圖Fig.5 Bifurcation diagram ofupvas E varies
3.3 以Kp為分岔參數(shù)
實(shí)際工程中,控制環(huán)節(jié)的電路參數(shù)對(duì)系統(tǒng)的非線性動(dòng)力學(xué)特性有很大的影響,選取合適的控制參數(shù),有助于系統(tǒng)的穩(wěn)定運(yùn)行。圖6給出了當(dāng)其他電路參數(shù)不變、系統(tǒng)隨電壓外環(huán)比例系數(shù)Kp變化時(shí)光伏電池輸出電壓upv的分岔圖。可見(jiàn),當(dāng)Kp>0.7時(shí),系統(tǒng)穩(wěn)定運(yùn)行,光伏電池輸出電壓穩(wěn)定在12 V;當(dāng)Kp<0.7時(shí),系統(tǒng)失去穩(wěn)定,出現(xiàn)混沌現(xiàn)象。
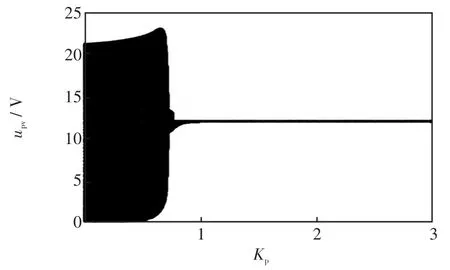
圖6 系統(tǒng)隨KP變化時(shí)upv的分岔圖Fig.6 Bifurcation diagram ofupvasKPvaries
3.4 以Cf為分岔參數(shù)
濾波參數(shù)也會(huì)對(duì)系統(tǒng)的動(dòng)力學(xué)特性產(chǎn)生影響,以濾波電容Cf為參數(shù)的分岔圖如圖7所示。可以看出,大約在Cf=24.6 μF時(shí),系統(tǒng)由穩(wěn)定狀態(tài)進(jìn)入混沌狀態(tài),并且在隨后的參數(shù)變化區(qū)域內(nèi),周期態(tài)與混沌態(tài)小范圍交替出現(xiàn)。由此,在實(shí)際工程設(shè)計(jì)中,為避免系統(tǒng)出現(xiàn)混沌,Cf需要在0~24.6 μF內(nèi)取值。
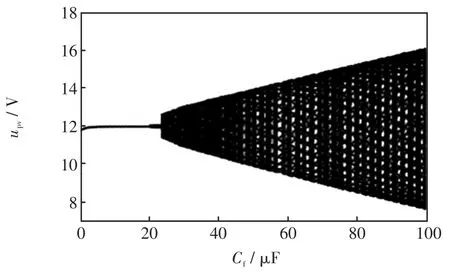
圖7 系統(tǒng)隨Cf變化時(shí)upv的分岔圖Fig.7 Bifurcation diagram ofupvasCfvaries
4 穩(wěn)定性分析
本文采用雅可比矩陣法對(duì)系統(tǒng)的穩(wěn)定性進(jìn)行理論分析。首先求解系統(tǒng)的平衡點(diǎn),然后針對(duì)系統(tǒng)狀態(tài)方程系數(shù)矩陣含時(shí)變參數(shù)的問(wèn)題,在平衡點(diǎn)處對(duì)系統(tǒng)的狀態(tài)平均方程做線性化處理,最后根據(jù)雅可比矩陣的特征值對(duì)系統(tǒng)進(jìn)行穩(wěn)定性分析。
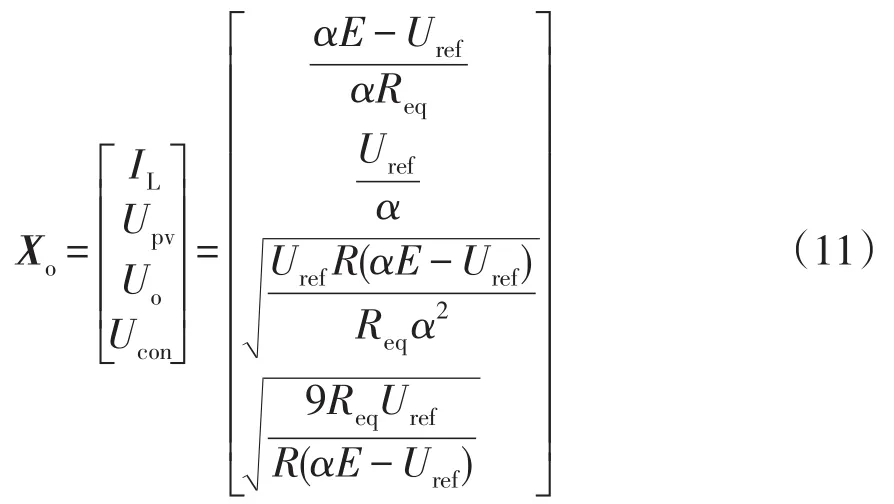
根據(jù)式(10)可得系統(tǒng)的狀態(tài)平均方程為
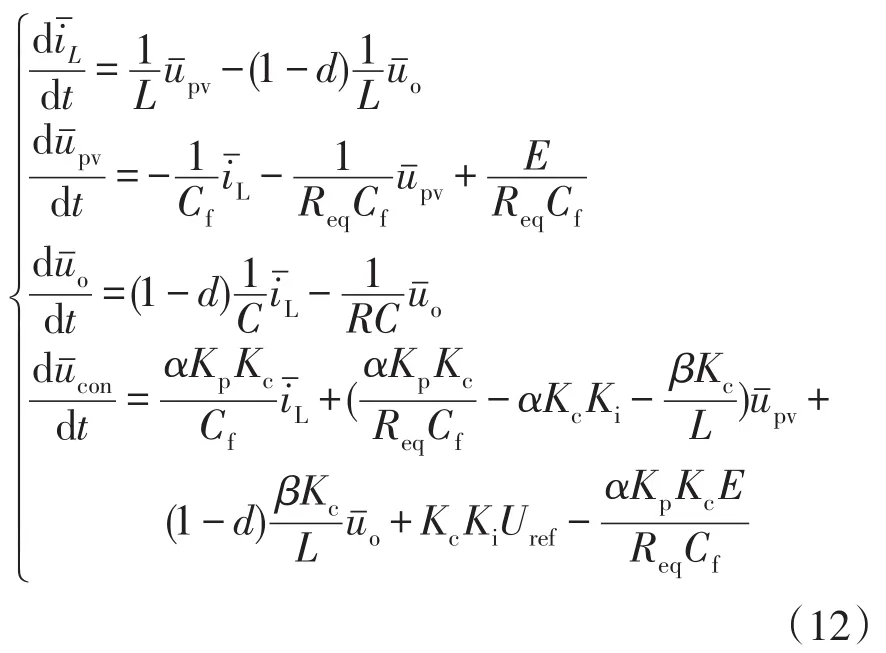
在平衡點(diǎn)Xo處,對(duì)式(12)進(jìn)行線性化處理,可得到系統(tǒng)的線性化方程為
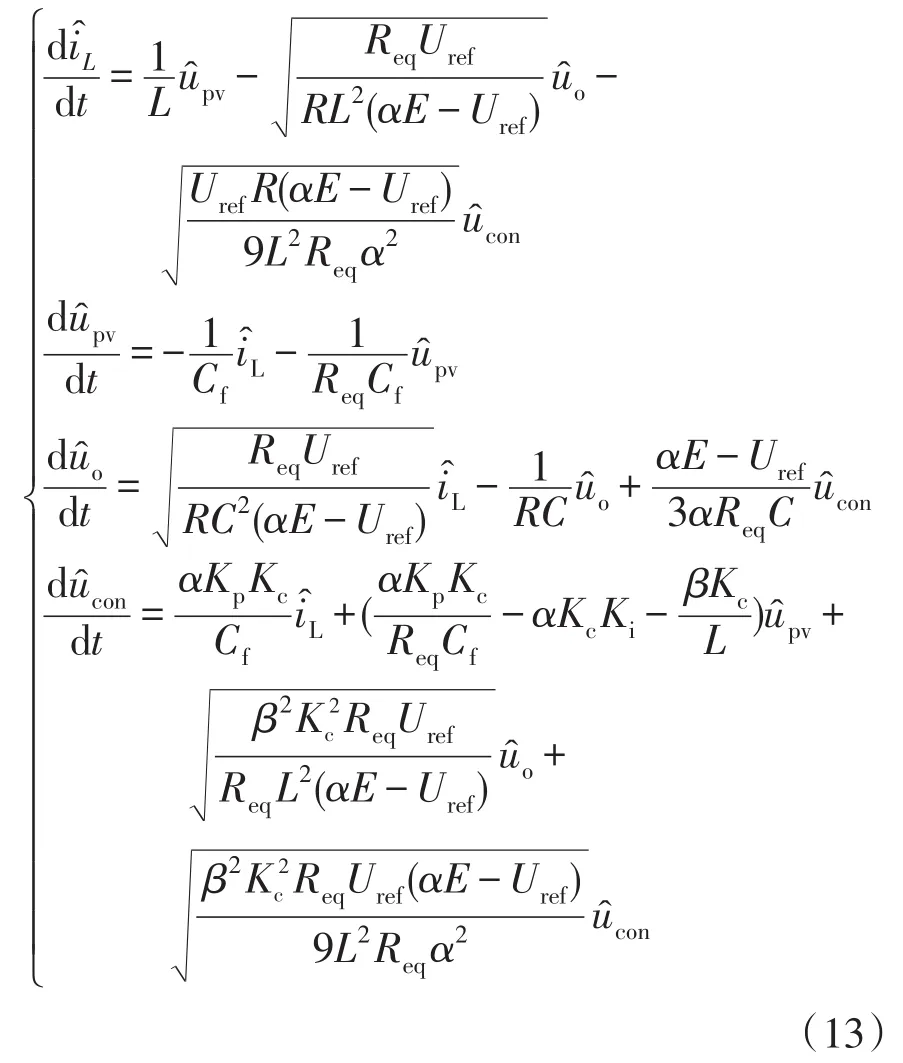
因此,式(13)的雅可比矩陣為
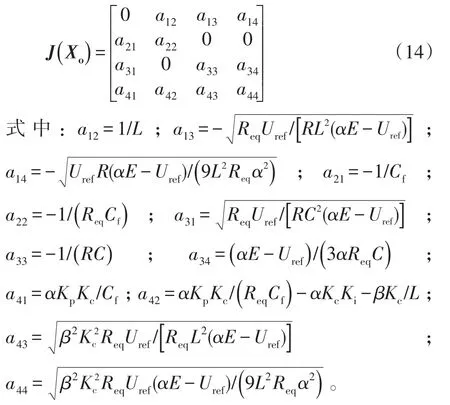
求雅可比矩陣特征值的方程為

基于式(14)和式(15),可以準(zhǔn)確計(jì)算出系統(tǒng)在平衡點(diǎn)處雅可比矩陣特征值隨參數(shù)Req、E、Kp及Cf變化的軌跡,確定分岔點(diǎn)位置。為了保證系統(tǒng)在臨界穩(wěn)定時(shí),雅可比矩陣特征值盡可能接近虛軸,本文對(duì)各參數(shù)的取值精確到小數(shù)點(diǎn)后4位,取雅可比矩陣特征值最接近虛軸時(shí)對(duì)應(yīng)的參數(shù)值為其臨界穩(wěn)定值,結(jié)果如表2~表5所示。
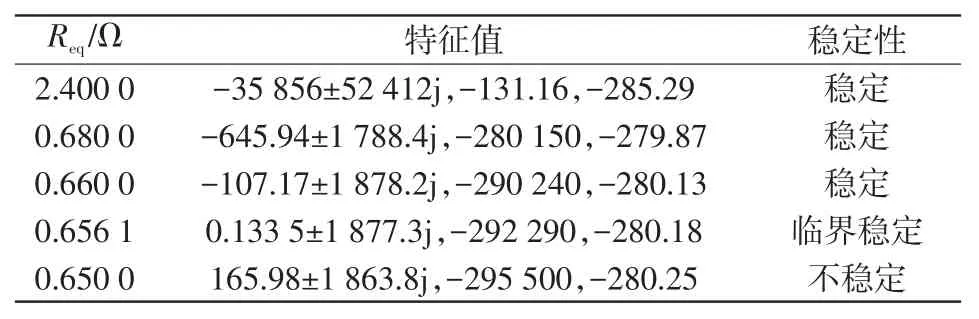
表2 雅可比矩陣特征值隨參數(shù)Req變化的情形Tab.2 Eigenvalues of Jacobian matrix asReqvaries
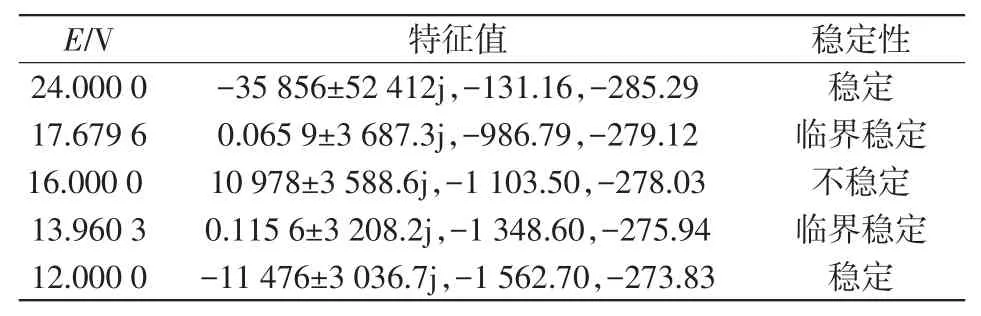
表3 雅可比矩陣特征值隨參數(shù)E變化的情形Tab.3 Eigenvalues of Jacobian matrix as E varies
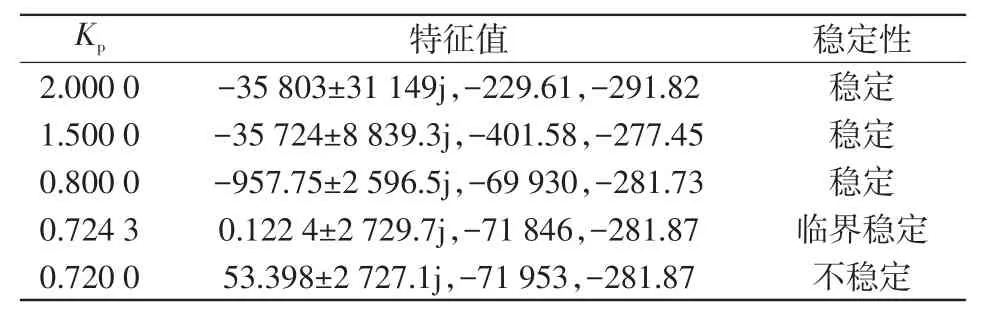
表4 雅可比矩陣特征值隨參數(shù)Kp變化的情形Tab.4 Eigenvalues of Jacobian matrix asKpvaries
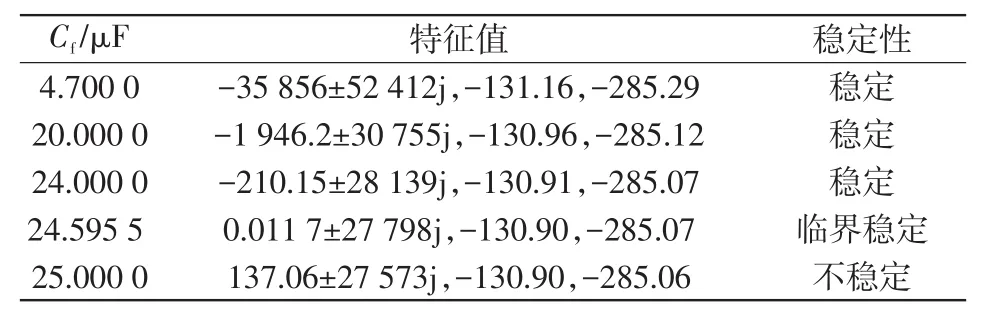
表5 雅可比矩陣特征值隨參數(shù)Cf變化的情形Tab.5 Eigenvalues of Jacobian matrix asCfvaries
由表2可知:以光伏電池等效內(nèi)阻Req為分岔參數(shù),當(dāng)Req<0.656 1 Ω時(shí),系統(tǒng)的雅可比矩陣特征值在復(fù)平面右半部分,說(shuō)明此時(shí)系統(tǒng)處于不穩(wěn)定狀態(tài);當(dāng)Req=0.656 1 Ω時(shí),雅可比矩陣特征值穿越虛軸,進(jìn)入復(fù)平面左半部分,系統(tǒng)處于臨界穩(wěn)定狀態(tài);當(dāng)Req>0.656 1 Ω時(shí),系統(tǒng)的雅可比矩陣特征值全部位于復(fù)平面左半部分,說(shuō)明此時(shí)系統(tǒng)穩(wěn)定運(yùn)行。與圖4結(jié)果吻合。
由表3可知:以等效電動(dòng)勢(shì)E為分岔參數(shù),當(dāng)E<13.960 3或E>17.679 6時(shí),系統(tǒng)的雅可比矩陣特征值在復(fù)平面左半部分,說(shuō)明此時(shí)系統(tǒng)處于穩(wěn)定狀態(tài);當(dāng)13.960 3<E<17.679 6時(shí),系統(tǒng)的雅可比矩陣特征值全部位于復(fù)平面右半部分,說(shuō)明此時(shí)系統(tǒng)處于混沌狀態(tài);當(dāng)E=13.960 3或E=17.679 6時(shí),系統(tǒng)處于臨界穩(wěn)定狀態(tài)。結(jié)果與圖5相互照應(yīng)。
由表4可知:以電壓環(huán)比例系數(shù)Kp為分岔參數(shù),當(dāng)Kp<0.724 3時(shí),系統(tǒng)處于混沌狀態(tài);繼續(xù)增大Kp,當(dāng)Kp=0.724 3時(shí),系統(tǒng)臨界穩(wěn)定;當(dāng)Kp>0.724 3時(shí),系統(tǒng)的雅可比矩陣特征值處于復(fù)平面左半部分,說(shuō)明系統(tǒng)穩(wěn)定運(yùn)行。與圖6結(jié)果一致。
由表5可知:以濾波電容Cf為分岔參數(shù),當(dāng)Cf=24.595 5 μF時(shí),雅可比矩陣特征值穿越虛軸進(jìn)入右半平面,系統(tǒng)處于臨界穩(wěn)定狀態(tài);當(dāng)Cf>24.595 5 μF時(shí),雅可比矩陣特征值處于復(fù)平面右半部分,系統(tǒng)處于混沌狀態(tài);當(dāng)Cf<24.595 5 μF時(shí),雅可比矩陣特征值處于復(fù)平面左半部分,系統(tǒng)穩(wěn)定運(yùn)行。結(jié)果與圖7相照應(yīng)。
對(duì)于系統(tǒng)的設(shè)計(jì)而言,能夠確定系統(tǒng)失穩(wěn)的邊界參數(shù)是非常重要的。由于等效電動(dòng)勢(shì)E和內(nèi)阻Req對(duì)光伏電池輸出電壓有很大的影響。因此,圖8給出了E-Req構(gòu)成的二維參數(shù)平面上的穩(wěn)定性邊界,分別基于理論分析和數(shù)值仿真得到的穩(wěn)定性邊界進(jìn)行對(duì)比,以便于協(xié)助工程師選擇合適的輸入?yún)?shù),避免系統(tǒng)出現(xiàn)混沌現(xiàn)象。
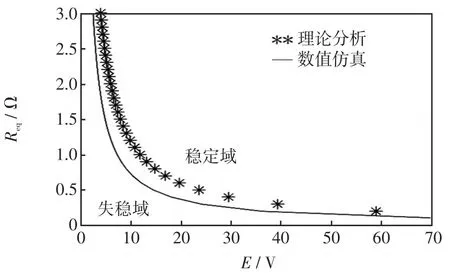
圖8 系統(tǒng)在平面上的穩(wěn)定性邊界Fig.8 Stability boundary on E-Req plane
5 Matlab/Simulink仿真驗(yàn)證
時(shí)域波形是某一狀態(tài)變量隨時(shí)間變化的歷程,相圖是在相空間下系統(tǒng)不同狀態(tài)變量間的關(guān)系,二者通過(guò)記錄系統(tǒng)的運(yùn)動(dòng)軌跡,直接反映系統(tǒng)的當(dāng)前運(yùn)行狀態(tài)。從這兩個(gè)角度出發(fā),對(duì)系統(tǒng)的主電路及控制電路進(jìn)行仿真驗(yàn)證,系統(tǒng)仿真參數(shù)如表1所示。
系統(tǒng)默認(rèn)參數(shù)運(yùn)行時(shí)upv和iL的時(shí)域波形如圖9(a)所示,可見(jiàn),upv、iL分別穩(wěn)定在12 V、5 A,光伏電池的輸出功率達(dá)到最大值60 W,實(shí)現(xiàn)了系統(tǒng)的控制目標(biāo)。去掉前20 000個(gè)周期之后,每隔一個(gè)開(kāi)關(guān)周期對(duì)iL和upv進(jìn)行一次采樣,可得二者的相圖如圖9(b)所示,采樣點(diǎn)均重合在一個(gè)位置,此時(shí)相圖為一個(gè)點(diǎn),說(shuō)明系統(tǒng)穩(wěn)定運(yùn)行于周期1。
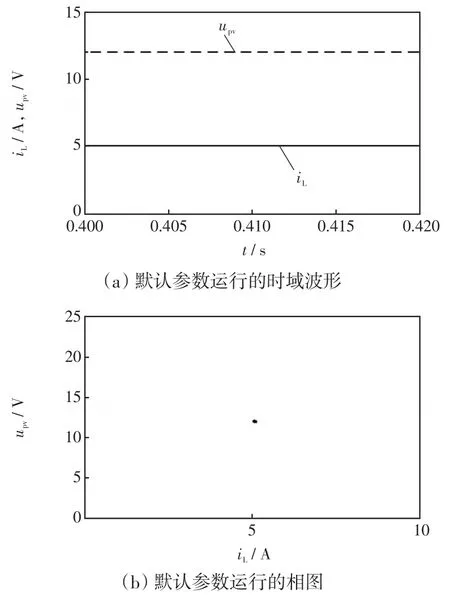
圖9 系統(tǒng)默認(rèn)參數(shù)運(yùn)行的時(shí)域波形及相圖Fig.9 Time-domain waveforms and phase trajectory during system operation with default parameters
保持其他參數(shù)不變,圖10給出了Req=0.6 Ω時(shí)upv和iL的時(shí)域波形及其相圖。由圖10(a)可以看出,在某些開(kāi)關(guān)周期內(nèi)電感電流下降到0,說(shuō)明系統(tǒng)在CCM和DCM模式下交替運(yùn)行。iL和upv的相圖如圖10(b)所示,相點(diǎn)的移動(dòng)軌跡為一條斜線,二者呈現(xiàn)反方向大幅度的變化,說(shuō)明系統(tǒng)處于混沌狀態(tài)。
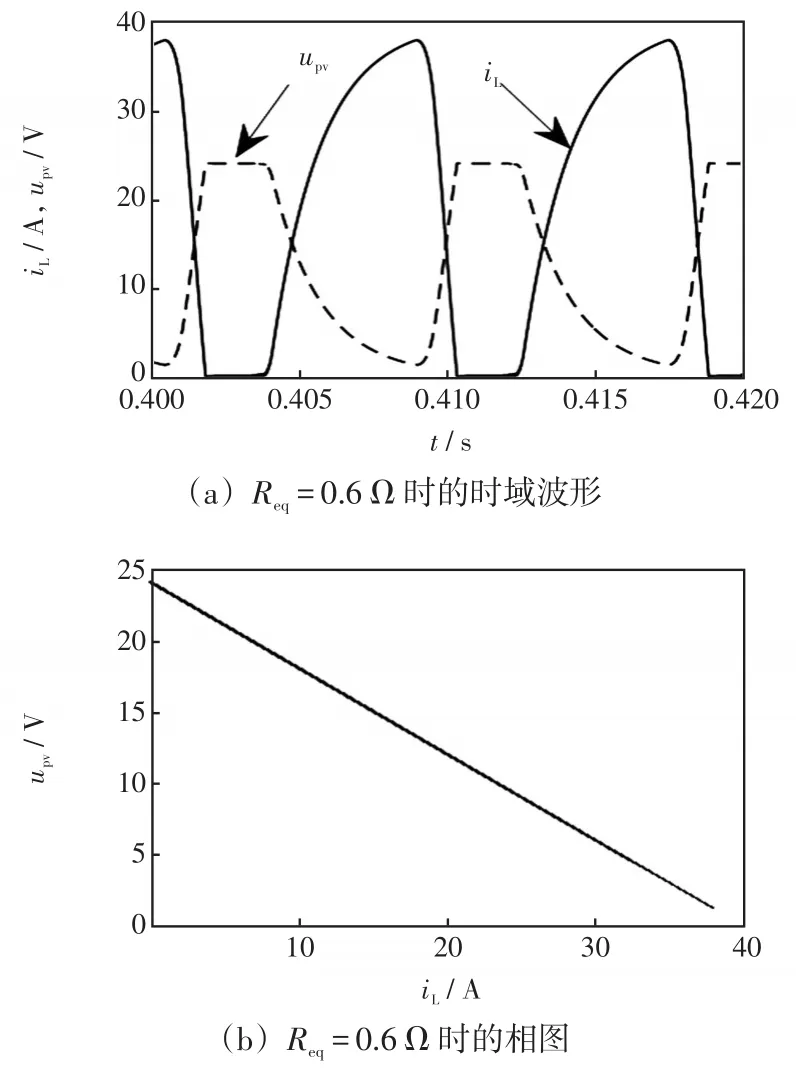
圖10 Req=0.6 Ω時(shí)的時(shí)域波形及相圖Fig.10 Time-domain waveforms and phase trajectory withReq=0.6 Ω
保持其他參數(shù)不變,圖11給出了E=16 V時(shí),upv和iL的時(shí)域波形及其相圖。由圖11(a)可以看出,upv和iL的變化幅度分別為4.06 V和3.35 A。如圖11(b)所示,此時(shí)二者的相圖由無(wú)數(shù)個(gè)位置不重合的閉合曲線組成,說(shuō)明系統(tǒng)處于混沌狀態(tài)。

圖11 E=16 V時(shí)的時(shí)域波形及相圖Fig.11 Time-domain waveforms and phase trajectory withE=16 V
只改變電壓外環(huán)比例系數(shù)Kp,當(dāng)Kp=0.7時(shí)upv和iL的時(shí)域波形及其相圖如圖12所示。由圖12(a)可知,upv和iL的變化幅度分別為20.06 V和8.38 A,此時(shí)二者的相圖為一條閉合且兩端無(wú)規(guī)則變化的曲線,此時(shí)系統(tǒng)處于不穩(wěn)定狀態(tài),如圖12(b)所示。
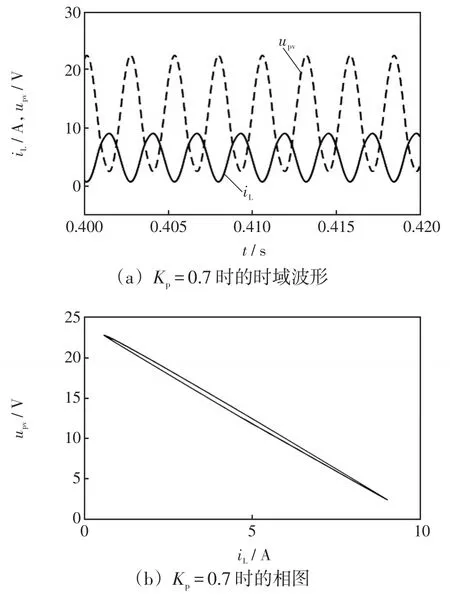
圖12 Kp=0.7時(shí)的時(shí)域波形及相圖Fig.12 Time-domain waveforms and phase trajectory withKp=0.7
當(dāng)保持其他參數(shù)不變、濾波電容Cf=24.6 μF時(shí),系統(tǒng)開(kāi)始出現(xiàn)混沌現(xiàn)象。圖13給出了Cf=100 μF時(shí)upv和iL的時(shí)域波形及其相圖。由圖13(a)可知,upv和iL的變化幅度分別為8.58 V和7.702 A。此時(shí)二者的相圖由無(wú)數(shù)個(gè)位置不重合的閉合曲線組成,說(shuō)明系統(tǒng)處于混沌狀態(tài),如圖13(b)所示。
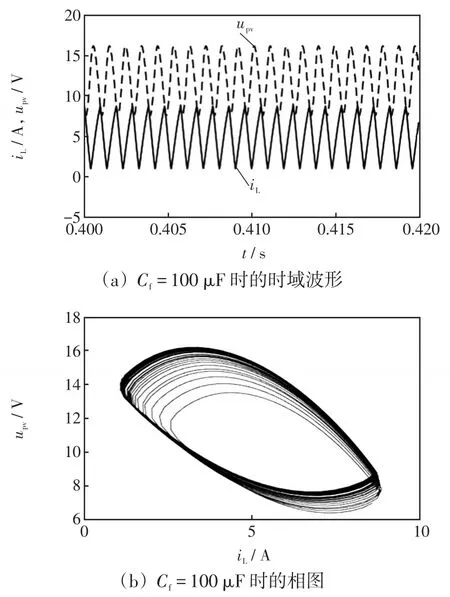
圖13 Cf=100 μF時(shí)的時(shí)域波形及相圖Fig.13 Time-domain waveforms and phase trajectory withCf=100 μF
通過(guò)觀察系統(tǒng)在不同參數(shù)下運(yùn)行時(shí)upv和iL的時(shí)域波形及其相圖可知:當(dāng)系統(tǒng)穩(wěn)定運(yùn)行時(shí),upv和iL的波形為一條直線,二者的相圖由無(wú)數(shù)個(gè)位置重合的點(diǎn)組成;當(dāng)系統(tǒng)處于混沌狀態(tài)時(shí),upv和iL的波形出現(xiàn)大幅度變化,二者的相圖也呈現(xiàn)出各種不規(guī)則的圖形。
6 結(jié) 論
(1)光伏電池內(nèi)阻對(duì)系統(tǒng)的動(dòng)力學(xué)特性產(chǎn)生影響,為更準(zhǔn)確反映其真實(shí)特性,將光伏電池等效為電動(dòng)勢(shì)和等效內(nèi)阻串聯(lián)。基于阻抗匹配原則確定了系統(tǒng)結(jié)構(gòu),通過(guò)控制光伏電池輸出電壓在E/2處,實(shí)現(xiàn)負(fù)載功率最大。
(2)通過(guò)數(shù)值仿真確定了系統(tǒng)的輸入?yún)?shù)Req和E、控制參數(shù)Kp、濾波參數(shù)Cf的穩(wěn)定域以及E-Req構(gòu)成的二維參數(shù)平面上的穩(wěn)定性邊界。采用雅可比矩陣法對(duì)系統(tǒng)的穩(wěn)定性進(jìn)行理論分析,與數(shù)值仿真結(jié)果相吻合。當(dāng)外界環(huán)境溫度或光照強(qiáng)度增大到一定條件時(shí),系統(tǒng)會(huì)因?yàn)镽eq小于其臨界穩(wěn)定值而出現(xiàn)混沌現(xiàn)象。當(dāng)環(huán)境溫度降低時(shí),光伏電池的最大輸出功率會(huì)變大,同時(shí)也能保證Req在其穩(wěn)定域內(nèi)工作。研究結(jié)果為光伏發(fā)電MPPT Boost變換器的實(shí)際設(shè)計(jì)及調(diào)試提供了重要的理論依據(jù)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
