自動化分裝投料系統(tǒng)設(shè)計與實現(xiàn)
2022-05-28 06:26:48蘇冠領(lǐng)
現(xiàn)代制造技術(shù)與裝備 2022年4期
關(guān)鍵詞:系統(tǒng)
蘇冠領(lǐng)
(廣西城市職業(yè)大學,崇左 532200)
目前,車間生產(chǎn)過程中的原裝分裝投料方式以人工和叉車工為主。這兩種生產(chǎn)方式存在施工效率低下、精確度不夠以及安全性較差等問題。在分裝至投料的過程中,數(shù)據(jù)采集方式主要是純?nèi)斯げ杉瑢?dǎo)致投料車間的信息化以及數(shù)據(jù)化程度較低,這樣在生產(chǎn)設(shè)備方面就容易出現(xiàn)獨立控制和信息孤島的問題。針對上述問題,設(shè)計一款自動化分裝投料機器人,專門用于生產(chǎn)投料車間。使用投料機器人在投料運輸、分裝以及投料的過程中實現(xiàn)自動化,達到智能車間的效果。智能分裝材料系統(tǒng)的投料智能化主要通過分裝投料自動化、系統(tǒng)檢測以及信息化的收集與處理實現(xiàn)。
1 自動化分裝投料系統(tǒng)總體設(shè)計要求
1.1 工作環(huán)境及工作內(nèi)容
目前,車間生產(chǎn)過程中的原料投料方式存在效率低、精確度不夠、安全性差等不足,而且原材料在投料時容易出現(xiàn)揚塵的問題。針對上述問題,以滿足減少土建改動的需求為前提,以實現(xiàn)投料自動化為終極目標,可以選用機械化自動化的方案,即使用投料機器人,從配重方式、安裝位置以及除塵裝置等方面進行優(yōu)化。使用自動投料機器人,可以實現(xiàn)分裝投料的無人化、自動化,一定程度上可以節(jié)省人力成本,提高生產(chǎn)過程的安全性,有利于保證投料車間的生產(chǎn)環(huán)境,如圖1所示。在投料車間中,自動投料機器人的工作內(nèi)容主要有分裝投料和投料除塵。投料吸塵整個過程的實現(xiàn)主要是投料機器人接收到吸塵指令后執(zhí)行指令,打開吸塵裝置完成吸塵的任務(wù)。
1.2 投料機器人的主要功能需求和技術(shù)指標
本文設(shè)計的投料機器人為單體化背負式自動化運輸投料機器人,在實際工作中利用投料器械的架構(gòu)實現(xiàn)料品的分裝投料與自動投料。在不同的生產(chǎn)需求和實際工作環(huán)境下,投料機器人應(yīng)具備以下不同的基本功能[1]。
(1)導(dǎo)引。規(guī)劃投料機器人的行走路線,保證其自動化完成工作過程中能夠沿著指定路線行走,并且能夠在各個工位之間穩(wěn)定巡走。
(2)定位定點。投料機器人可以通過讀取提前設(shè)置在自動投料設(shè)備上的ID卡信息辨別工位上的站點位置,對投料機器人的各種指示進行準確的工位停靠。
(3)安全防護。增強投料車間的安全性,保障其投料運輸安全,同時保證投料機器人在運行過程中可以穩(wěn)定且無故障運行,不會出現(xiàn)碰撞事故和傷人事故[2]。
(4)夾抱。此功能可以保證投料桶能夠拆分攜帶,確保投料機器人靈活地完成夾緊投料桶和松放投料桶的動作。
(5)負重和裝載。由于實際需要,投料機器人必須能夠負載200 kg的原料,加上投料機器人的自身質(zhì)量,投料機器人要擁有足夠的空間用來負載。
(6)投料的翻轉(zhuǎn)。投料機器人會根據(jù)指示完成不同的動作,要求機器人能夠完成投料桶的翻轉(zhuǎn)和卸料動作,達到投料準確的目的,使得原材料能夠穩(wěn)定地落入提取罐口。
(7)除塵和吸塵。投料間的衛(wèi)生狀況對于投料間工人的身體健康有著重要的影響,為了保障工人的身體不受傷害,生產(chǎn)環(huán)境必須達到標準,所以投料機器人工作時會除塵和吸塵。
(8)其他。急停:機器人發(fā)生故障時可以及時自動停止,以免發(fā)生意外。工作狀態(tài)顯示:方便工人進行操作。報警:發(fā)生意外時,通過報警裝置讓工人及時發(fā)現(xiàn)并處理意外,以防造成更大的危害。防爆:當機器人內(nèi)部設(shè)備出現(xiàn)問題時,不易發(fā)生爆炸,減少人員傷害的可能性。
1.3 內(nèi)部布置
投料機器人系統(tǒng)呈現(xiàn)出U形,每個工位通過一個滾筒輸送線完成料筐傳輸。該輸送線路呈積放式,整個輸送過程的驅(qū)動系統(tǒng)是減速電機的鏈輪鏈條,通過變頻器可以調(diào)節(jié)傳輸?shù)乃俣取?缮炜s擋停單元是每一個工位末端都存在的設(shè)計,目的是方便配合射傳感器對料筐實現(xiàn)擋停與放行的動作。工作站的外面設(shè)置了一些圍欄,目的是對工作站進行安全防護。
該系統(tǒng)給安全人員維修系統(tǒng)內(nèi)部設(shè)施和處理故障方面帶來了極大的便利。根據(jù)生產(chǎn)線的走向,在輸送線的下方搭設(shè)料線纜橋架,在內(nèi)部分開鋪設(shè)了控制線纜和動力線纜[3]。
1.4 設(shè)備參數(shù)
車間物流系統(tǒng)、供料系統(tǒng)和分裝投料系統(tǒng)相互協(xié)調(diào)進行工作,系統(tǒng)的料筐和臺車的加工制造都需要按照設(shè)計要求完成,詳情見表1。
另外,對輸送的節(jié)拍要求每個料筐投料質(zhì)量為2 kg,在12 s內(nèi)完成;輸送速度設(shè)計為速度可調(diào),最大速度可達到20 m·min-1。投料精度由系統(tǒng)控制,誤差保證在±5%以內(nèi),人工設(shè)定投料量后由系統(tǒng)計量。
2 組成以及功能介紹
2.1 上下料橫移舉升工位
上下料橫移舉升工位由伸縮貨叉、氣動舉升單元及焊接鋼架構(gòu)成,如圖2所示。舉升單元呈豎向安裝,采用了浮動街頭和連接移動部件的安裝方式,而且設(shè)有單方向流動的節(jié)流閥,用來調(diào)節(jié)氣缸的升降速度。伸縮貨叉可以朝兩個方向進行運動,貨叉尺寸為900 mm 500 mm。如果負載量達到頂峰,伸貨叉的移動速度可以達到30 m·min-1。變頻器可以用來調(diào)節(jié)伸貨叉的速度和尺寸,伸縮貨叉最高可以承受200 kg的質(zhì)量。堆疊料筐要想能夠在拆疊盤工位和堆疊料筐之間移位,必須使舉升單元和伸縮貨叉之間相互配合[4]。
2.2 拆盤工位
拆盤位設(shè)備主要由導(dǎo)向裝置、可伸縮插腳以及抬升單元構(gòu)成,主要分布在傳輸線的左右兩側(cè),且呈對稱狀,如圖2和圖3所示。兩個氣缸對應(yīng)串聯(lián)結(jié),形成了抬升單元。兩個氣缸的缸徑均為32 mm,在安裝過程中需要增加氣缸來防護轉(zhuǎn)檔。因為兩個氣缸的行程不同,要使3個不同的插腳達到不同的高度位置,可以通過邏輯控制的方式實現(xiàn)。插腳伸出和縮回動作的完成,主要利用氣缸通向?qū)蜓b置。標準的雙導(dǎo)軌機制和雙滑塊結(jié)構(gòu)可以構(gòu)成一個完整的導(dǎo)向裝置。前文提到的呈現(xiàn)左右對稱的兩個氣缸,通過壓縮空氣完成驅(qū)動動作,可以實現(xiàn)兩側(cè)機構(gòu)的動作達成一致。最底層的料筐要傳輸?shù)较旅娴墓の唬紫纫?jīng)過輸送線路,然后要把倒數(shù)第2層及其往上的料筐抬起,降低抬升機構(gòu),并進行兩個動作的重復(fù),最終把堆疊在一起的兩層料筐按照順序拆成單層的料筐。
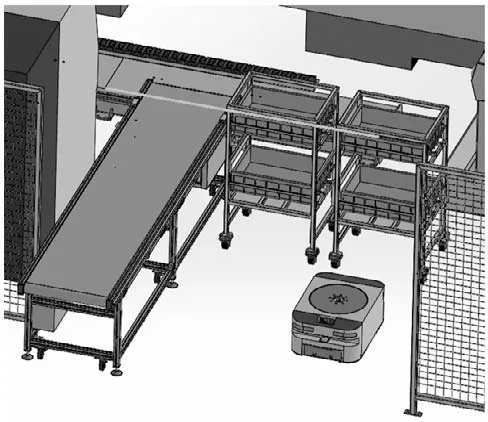
圖2 上下料橫移舉升工位
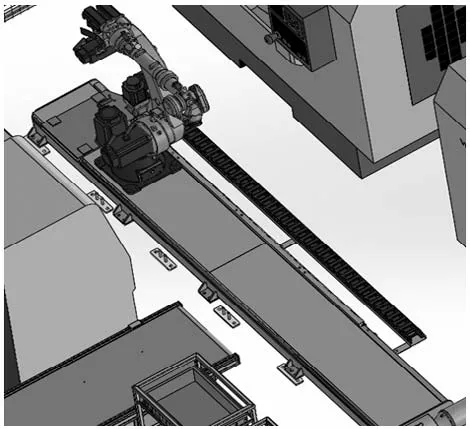
圖3 拆盤工位
2.2.1 移載工位
移載工位設(shè)備主要由擋停機構(gòu)、滾筒輸送機以及氣動舉升單元構(gòu)成。移載工位滾筒的高度相較于上一個工位低20 mm,一旦接收到這個工位有任何料筐流入的信息時,伸出舉升氣缸,運轉(zhuǎn)兩根傳送帶,把料筐自動移動到擋停位并縮回氣缸,然后料筐落到滾筒的輸送線上面,并且移動到下一個工位,即可完成料筐和自動輸送。
2.2.2 定量投料工位
定量投料工位設(shè)備主要由不銹鋼料倉、皮帶提升機、自動開閉收集槽以及往復(fù)落料機構(gòu)構(gòu)成。不銹鋼料倉的形狀為喇叭口形,可以容納1.5 m3的投料。皮帶的寬度為600 mm,每隔200 mm安裝一個隔板,在頂部設(shè)置了驅(qū)動電機,驅(qū)動電機的提升運轉(zhuǎn)速度通過變頻器調(diào)節(jié)。可旋轉(zhuǎn)的擋板安置在收集槽口下部,在其中心軸90°范圍內(nèi)有一個擺動氣缸,通過驅(qū)動可以控制收集槽口的開關(guān)[5]。收集槽下端安裝有智能秤,其表面尺寸為500 mm 500 mm,可以稱量從上方掉下來的物料。在往復(fù)機構(gòu)中,有兩個口字形腔體可以帶動氣缸做往復(fù)運動,路程約500 mm。工作人員把物料加入料倉,皮帶提升機驅(qū)動物料升到收集物料的槽內(nèi),然后智能秤可以稱量落入的物料質(zhì)量。達到設(shè)定的數(shù)值以后,系統(tǒng)會關(guān)閉自動槽口的閥門。一直重復(fù)這個動作,最后由相關(guān)設(shè)備讀取信息。
2.2.3 攤勻工位
攤勻設(shè)備由導(dǎo)向機構(gòu)、電機滾珠絲杠傳動模塊及其旋轉(zhuǎn)結(jié)構(gòu)、刮板等部件組成。電機絲推動運動部件向z方向和x方向運動,電機同時向y方向推動刮板行進,然后旋轉(zhuǎn)機構(gòu)推動刮板旋轉(zhuǎn)90°。刮板行程包含所有的料筐,可根據(jù)刮板的高寬比自動均勻鋪展物料。
2.2.4 疊盤工位
與拆盤工位的作用相反,與機械設(shè)備結(jié)構(gòu)相同,單面料筐可按順序堆疊成12層。它將最下層的料筐抬起,然后自動轉(zhuǎn)移到另一個料架上,降低插腳,將料架疊在一起,之后不斷插入和取出料架,實現(xiàn)全自動堆垛的功能。
2.2.5 料車移載工位
物料車轉(zhuǎn)運過程的機械設(shè)備主要由輕鋼結(jié)構(gòu)、推動模塊、抓取機構(gòu)、起升機構(gòu)及其條碼讀取器組成。鋼架為門形,兩側(cè)支腿用螺栓固定于地面,然后雙導(dǎo)軌三滑塊結(jié)構(gòu)分布在橫梁的上方。根據(jù)傳動齒輪的齒條和小齒輪結(jié)構(gòu),可以推動減速機上的工作臺滾動,可滾動的合理距離為2 m。橫梁的兩端可以控制滑臺的啟動與停止。驅(qū)動單元和升降機構(gòu)還有抓取機構(gòu)相互配合,可以把臺車上面的物料移動到下面的物料區(qū),然后讀取器讀取臺車上的條碼信息,并及時上傳到可編程邏輯控制器(Programmable Logic Controller,PLC)與料筐進行綁定。
3 結(jié)語
自動化分裝投料系統(tǒng)綜合運用了諸多技術(shù),包括自動化傳輸、自動稱量、傳感器識別、信息讀寫、數(shù)據(jù)采集、氣動控制以及PLC控制等技術(shù)。這些技術(shù)可以有效解決分裝投料過程中遇到的各種難題,提高分裝物料的計量精度和生產(chǎn)效率,值得在實際生產(chǎn)中廣泛應(yīng)用。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32