舉升力動態控制的電液輔助坐墊設計
2022-05-28 06:24:32倪晨超李毅康勞立明
現代制造技術與裝備 2022年4期
倪晨超 李毅康 勞立明
(臺州學院 航空工程學院,臺州 318000)
老年人由于肌肉萎縮下肢力量較弱,普遍存在從座椅上起身困難的問題,對生活質量有較大影響。此外,部分下肢創傷患者在完全康復前也需要護理人員提供起身輔助。
不少學者研發了具有輔助起身功能的老年椅或者坐墊,并從起立動作分析[1]、輔助機構運動學分析[2]以及結構設計[3]等方面展開研究。這些設計通常未考慮起身過程所需支撐力的動態變化,以實現起身運動軌跡為主要目標,造成使用者在起身過程中的強迫感,甚至造成恐慌心理。論文討論了一種以舉升力控制為目標,能夠適應起身時膝關節力矩需求的輔助坐墊,與起身過程匹配良好。
1 坐姿起身的膝關節力矩
輔助坐墊的結構及控制設計需要獲得人體起身過程中的膝關節力矩。本文采用測量起身過程中的關節角度,通過人體模型的動力學逆解求解關節力矩[4]。
1.1 關節角度測量
關節角度測量采用3個慣性傳感器,分別綁在實驗者的小腿、大腿和腹部,隨起身過程中軀干的運動而發生角度變化,如圖1所示。3個慣性傳感器通過Modbus總線連接,電腦上位機軟件能實時采集并保存傳感器角度值。
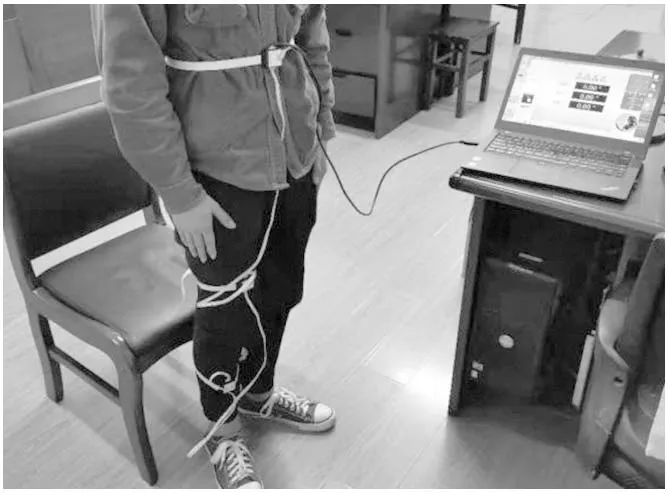
圖1 關節角度測量
自下而上3個傳感器角度值分別為θ1、θ2和θ3。踝關節轉角變化為θ1,膝關節轉角變化為θ2-θ1,髖關節轉角變化為θ3-θ2。關節轉角測量值如圖2所示。
1.2 膝關節力矩估計
SolidWorks motion是以ADAMS為內核的三維運動與動力學仿真插件。在三維軟件中建立仿真人體模型,模型人身高為175 cm,質量為65 kg,仿真結果如圖3所示。

圖2 關節角度變化數據

圖3 SolidWorks仿真人體模型
仿真分析過程如下:
(1)設置仿真人初始位置為落座姿態,添加踝關節、膝關節和髖關節處的“馬達”,馬達角位移按圖2測得數據給定;
(2)設置腳底面和其他部位不動,并添加重力場;
(3)SolidWorks解算人體從坐姿起身的膝關節處馬達扭矩。
起身過程膝關節動態力矩如圖4所示。可見,初始階段所需要的膝關節力矩最大約36 N·m,起身完成時所需的膝關節力矩較小,起身困難出現在初期階段。
2 坐墊結構及電液驅動設計
2.1 坐墊結構設計
坐姿起身過程中,臀部運動是平移和旋轉的復合運動。現有大部分起身坐墊只能實現單一旋轉運動,與起身過程不匹配。

圖4 膝關節力矩仿真結果
新型坐墊機械結構如圖5所示,主要包括底座、坐板、可調支架桿和驅動油缸4部分。底座提供基礎支撐,并容納驅動油缸和控制電路。坐板支撐臀部,實現旋轉和平移的復合運動。可調支架桿通過銷釘在調節孔處與另一支架桿配對鉸接。油缸驅動坐板抬升。
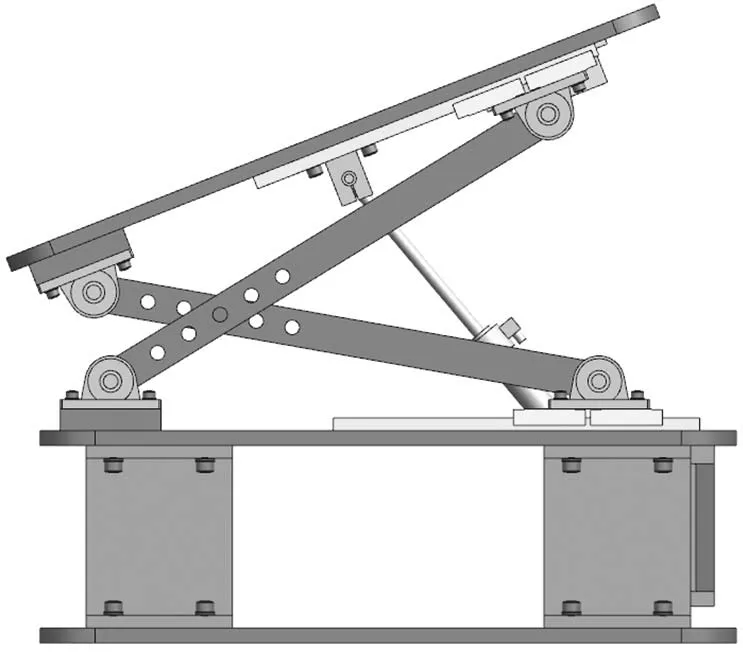
圖5 坐墊機械結構
該結構在傳統剪叉式升降機構上進行創新,把固定居中的支架鉸接點重新設計為可調且偏置的。選擇合適的孔位,在銷釘約束下坐墊將向斜上方抬起,呈現為平移和翻轉的復合運動,更加符合人體起身姿態。
2.2 電液驅動設計
坐板舉升由液壓缸推動,推力受液壓壓強控制。通過控制進入密閉容腔的油液流量調節液壓壓強,相對剛度小于電動推桿,具有更好的控制效果。
電液系統如圖6所示,主要包括直流無刷電機、微型齒輪泵、溢流閥、換向閥、壓力傳感器和微型油缸。直流電機由電機控制器動態調節轉速,并驅動微型齒輪泵變轉速工作。轉速越高,泵輸出油液流量越大。換向閥得電時,油路接通,泵輸出油液通過進入液壓缸的無桿腔。通過控制液壓缸無桿腔壓強,可調節坐墊舉升力大小。

圖6 電液驅動系統
3 控制系統設計
3.1 控制硬件電路
控制電路元器件包括Arduino UNO控制板、電機控制器、壓力傳感器和位移傳感器等,硬件結構如圖7所示。Arduino UNO為低成本的主控板。電機控制器接收Arduino UNO輸出的脈沖寬度調制(Pulse Width Modulation,PWM)信號并調節電機轉速。壓力傳感器測量油腔壓強,位移傳感器測量液壓缸位移。
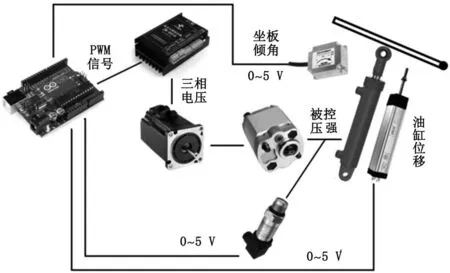
圖7 控制系統硬件結構
3.2 控制策略
壓強控制程序在Arduino UNO中編寫,通過調用
3.2.1 液壓缸目標壓力
在起身前期,坐板轉角θ和膝關節轉角近似相等。膝關節力矩近似表示為坐板轉角的函數Tx(θ)。設坐墊輔助系數為α,則提供的輔助力矩Tf(θ)為:

液壓缸舉升力乘以支撐力臂即為輔助力矩:

于是,液壓缸的目標壓強pd即為:

式中:Ap為液壓缸活塞面積;L為油缸支撐力臂長度。
3.2.2 壓強控制算法
壓強控制算法是坐墊性能的關鍵。已有研究主要討論了液壓壓強控制算法,包括PI控制[5]、模糊控制[6]等。受限于Arduino UNO的CPU算力,本文采用計算量較小的P控制方法。同時,為提高壓力控制精度,本文參考Kim等提出的速度補償算法[7],算法框圖如圖8所示。其中:D為液壓泵排量;KF和Kω分別為壓強和速度比例系數。
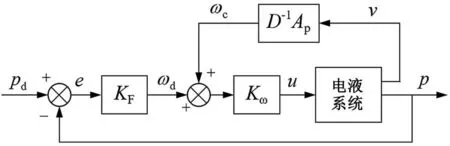
圖8 控制算法框圖
液壓缸速度v由位移微分獲得,速度相關補償量為:

最終,直流無刷電機轉速控制信號為:

4 實驗與分析
如圖9所示,制作了輔助坐墊實物樣機,并開展坐墊樣機的使用性能測試。測試員通過控制自身膝關節施加力量,分成較不使力(工況1)、一般使力(工況2)、較為使力(工況3)這3種工況,模擬不同用戶下的輔助坐墊性能。力矩補償系數α設為0.5,即坐墊提供50%起身所需力矩。坐墊及控制器參數如表1所示。

圖9 輔助坐墊樣機

表1 坐墊及控制器參數
實驗測得的壓強曲線如圖10所示。可見:當用戶自身膝關節使力較小時(工況1),坐板不足以推動用戶起身,坐板位置保持不變,油缸壓強維持在最大目標壓強值6 MPa;當用戶自身膝關節力與調定的輔助系數相匹配時(工況2),坐板能始終緊貼用戶臀部,油缸壓強基本能跟隨設定的目標壓強值變化,實現了良好的輔助起身效果;當用戶自身膝關節施力較大時(工況3),壓強下降較大但仍能提供一定推力。

圖10 不同工況下的壓強曲線
分析結果表明,舉升力動態控制輔助坐墊能有效幫助用戶起身,且能適應不同膝關節力量的用戶。當膝關節力量較弱時,坐墊不會主動推動用戶起身,避免造成心理恐慌。只有當膝關節出力達到一定程度時,輔助坐墊才會跟隨使用者臀部運動,并提供一定的輔助力。
5 結語
本文通過起身時膝關節力矩估計、舉升機構創新設計以及速度補償壓強控制實施等,實現了舉升力動態控制的輔助坐墊設計。后續工作中,將對輔助坐墊的結構集成化設計、壓強控制算法智能適應以及采用EMG信號效果評估等方面開展持續研究,進一步擴展坐墊的實用性。