一種使用Sagnac環(huán)和I/ Q探測的全光微波測量方案
2022-05-28 04:15:42康博超樊養(yǎng)余譚慶貴高永勝
西安電子科技大學(xué)學(xué)報(bào) 2022年2期
康博超,樊養(yǎng)余,譚慶貴,高永勝
(1.西北工業(yè)大學(xué) 電子與信息學(xué)院,陜西 西安 710129;2.西安空間無線電技術(shù)研究所 空間微波技術(shù)國防重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710100)
微波信號參量測量包括頻率測量和相位測量等,廣泛應(yīng)用于電子設(shè)備中。現(xiàn)代衛(wèi)星通信、電子對抗和雷達(dá)等系統(tǒng)的信號形式逐漸往高頻段、大帶寬方向發(fā)展,傳統(tǒng)的微波測量系統(tǒng)由于受到電子瓶頸的限制,逐漸無法滿足現(xiàn)代先進(jìn)的微波測量系統(tǒng)對速度和帶寬的需求[1-3]。
微波光子技術(shù)在光域?qū)崿F(xiàn)微波信號的處理,在帶寬、可調(diào)性和抗電磁干擾方面具有明顯優(yōu)勢[4]。將微波光子技術(shù)用于高速微波測量,實(shí)現(xiàn)全光的微波參量測量,可以突破電子瓶頸的限制,從而滿足電子系統(tǒng)對高速率和大帶寬的需求[5]。近年來,全光微波測量技術(shù)作為一個(gè)新興的研究領(lǐng)域引起了諸多學(xué)者的興趣,業(yè)界報(bào)道了諸多基于微波光子方法的全光微波頻率或相位測量方案[6-22]。
文獻(xiàn)[10]提出了一種基于全光I/Q相干探測的多普勒頻移測量方案。該方案基于兩個(gè)電光調(diào)制器,同時(shí)使用了光耦合器對多普勒頻移(Doppler Frequency Shift,DFS)進(jìn)行測量。該方案的工作頻率范圍為14~18 GHz,最大測量誤差為6 Hz,并且可以通過I/Q信號的相位關(guān)系識(shí)別出多普勒頻移的方向。文獻(xiàn)[14]提出了一種基于雙驅(qū)動(dòng)馬赫-曾德調(diào)制器的多普勒頻移測量方案。在該方案中,工作頻率范圍為10~18 GHz,測量最大誤差小于1Hz,且能夠分辨多普勒頻移的方向。由于受到密集波分復(fù)用器(Dense Wavelength Division Multiplexing,DWDM)固定截止頻率的限制,該方案的最小工作頻率為10 GHz,且調(diào)制器工作在特殊工作點(diǎn),難以實(shí)現(xiàn)自動(dòng)偏壓控制。文獻(xiàn)[15]提出了一種基于級聯(lián)電光調(diào)制器的微波信號的相位測量的微波光子方法。在該方案中,兩個(gè)調(diào)制器均工作在最小點(diǎn)處,接收到的微波信號分別在兩個(gè)調(diào)制器中進(jìn)行調(diào)制后,在光載波處生成了一個(gè)新的光邊帶。該光邊帶的功率和相位呈函數(shù)關(guān)系,通過測量該光邊帶的功率,計(jì)算得到待測相位。在該文獻(xiàn)中使用18 GHz載頻信號進(jìn)行了實(shí)驗(yàn)測試,最大測量誤差小于5°。然而在該方案中兩個(gè)調(diào)制器級聯(lián)的調(diào)制方式使系統(tǒng)的復(fù)雜性和損耗大幅度增加。文獻(xiàn)[16]提出了一種簡單的微波信號多普勒頻移的光子學(xué)測量方法。在該方案中,使用簡單的DMZM進(jìn)行光電調(diào)制,利用參考信號分辨多普勒頻移信號的方向。在該方案中,工作頻率范圍為10~18 GHz,測量最大誤差小于1 Hz。由于該方案并沒有對載波進(jìn)行抑制,輸出的電信號存在載波自拍頻引起的直流偏移,且基波信號和載波信號拍頻生成的頻率分量會(huì)成為干擾信號。文獻(xiàn)[22]提出了一種可同時(shí)實(shí)現(xiàn)微波信號測頻和測相的光子學(xué)方案。在該方案中,通過串聯(lián)電光調(diào)制實(shí)現(xiàn)微波信號的下變頻,利用偏振復(fù)用調(diào)制將攜帶不同相位信息的微波信號同時(shí)調(diào)制到光載波上,最后對在不同偏振態(tài)上的光進(jìn)行解調(diào)后進(jìn)行相位比較得到相位信息。該方案在10~18 GHz的工作頻率范圍內(nèi)實(shí)現(xiàn)了高精度的相移和頻移測量。然而該方案通過串聯(lián)的結(jié)構(gòu)實(shí)現(xiàn)下變頻,該種結(jié)構(gòu)會(huì)大幅度降低變頻效率,且由于該系統(tǒng)采用了偏振復(fù)用的調(diào)制方式,偏振態(tài)對環(huán)境非常敏感,會(huì)導(dǎo)致系統(tǒng)的不穩(wěn)定。綜上所述,通過微波光子學(xué)方法對微波信號進(jìn)行測量時(shí),所遇到的問題并沒有得到很好的研究。為了提高微波信號頻率與相位測量系統(tǒng)的測量精度、穩(wěn)定性,并降低系統(tǒng)復(fù)雜度,對基于光子學(xué)的測量方案的研究具有非常重要的理論意義和現(xiàn)實(shí)價(jià)值。
筆者提出了基于馬赫-曾德調(diào)制器(Mach-Zehnder Modulator,MZM)和Sagnac環(huán)的微波頻率相位測量方案。結(jié)合全光下變頻和移相技術(shù),突破傳統(tǒng)測量技術(shù)的頻率依賴性高的問題,在超寬的工作頻率范圍內(nèi)實(shí)現(xiàn)較高的I/Q幅度和相位平衡。在該方案中,采用基于MZM和Sagnac環(huán)的光電調(diào)制結(jié)構(gòu),利用簡單的MZM調(diào)制器進(jìn)行載波抑制調(diào)制。利用DWDM分離光信號的上邊帶和下邊帶后,構(gòu)建I/Q下變頻通道。利用I/Q下變頻通道對接收射頻信號進(jìn)行鑒頻鑒相,通過數(shù)學(xué)推導(dǎo)證明了文中方案的可行性,并進(jìn)行了實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,該方案在較大的工作帶寬內(nèi),具有很好的頻率和相位測量精度。在頻移測量實(shí)驗(yàn)中,工作頻率范圍為10~40 GHz,分辨率可達(dá)1 Hz,測量最大誤差低于8 Hz。在相位測量仿真中,工作頻率范圍為10~40 GHz,相位測量最大誤差為7°,驗(yàn)證了該方案的可行性。
1 基本原理
筆者所提出的微波光子測量系統(tǒng)原理圖如圖1所示。

圖1 微波光子測量系統(tǒng)原理圖(圖中(a)~(g)代表不同點(diǎn)的光譜或電譜圖)
將激光二極管(Laser Diode,LD)生成的光載波注入光耦合器端口1中,該光載波Ein(t)=E0exp(jωc),其中,E0和ωc分別為光載波的平均光功率和角頻率。光耦合器將光載波分為功率相等的光功率的兩條光路。從光耦合器端口3輸出的光載波輸出到MZM的輸入端口。在MZM中,本振信號VLocos(2πfLot)驅(qū)動(dòng)MZM下臂,其中,VLo和fLo分別為本振信號的幅值和頻率。待測射頻信號VRFcos(2πfRFt+φRF)驅(qū)動(dòng)MZM上臂,其中VRF、fRF和φRF分別為待測信號的幅值、頻率和相位。經(jīng)過調(diào)制后的光信號在調(diào)制器與光耦合器所構(gòu)成的回路里沿順時(shí)針(ClocKwise,CK)方向傳播。另一方面,由光耦合器4端口輸出的另一路光載波注入到MZM的輸出端口,光信號在回路里沿逆時(shí)針(Counter-ClocKwise,CCK)方向傳播。由于MZM的特性,光載波正向通過調(diào)制器可以被射頻和本振信號有效調(diào)制,而光載波反向進(jìn)入調(diào)制器無法被有效調(diào)制,所以在MZM中,沿順時(shí)針方向傳播的光信號被LO信號和待測信號調(diào)制。同時(shí),在MZM中沿逆時(shí)針方向傳播的光信號沒有得到有效的調(diào)制。將兩路光路在光耦合器中合成為一路光信號從光耦合器端口2輸出,且可表示為
(1)

將耦合器4端口輸出的光信號通過摻鉺光纖放大器(Erbium Doped Fiber Amplifier,EDFA)進(jìn)行功率補(bǔ)償,接著使用雙通道DWDM來分離上邊帶和下邊帶。對光載波的中心波長進(jìn)行調(diào)節(jié),使光載波剛好落到兩個(gè)通道中間,從而將光信號的上下邊帶分離成兩個(gè)光通道。兩個(gè)光通道中的光信號可以分別表示為
(2)
(3)
其中,βE和αD分別表示EDFA的增益和DWDM的插入損耗。
經(jīng)過光電探測后,每個(gè)通道中的光電二極管(PD)輸出光電流,可分別表示為
(4)
(5)
從式(4)和式(5)可以發(fā)現(xiàn),兩個(gè)中頻信號的相位差為2θ。通過調(diào)整MZM的直流偏置工作點(diǎn)設(shè)置θ=45°,則光電探測后的光電流可以寫為
iup(t)∝cos(2πfLot-2πfRFt-φRF+45°) ,
(6)
idown(t)∝cos(2πfLot-2πfRFt-φRF-45°) 。
(7)
由式(6)和式(7)可知,兩個(gè)中頻信號的相位差為90°,則構(gòu)成了相互正交的I/Q通道,從而實(shí)現(xiàn)了微波光子I/Q下變頻。
當(dāng)將所提出的微波光子I/Q下變頻系統(tǒng)應(yīng)用于多普勒頻移測量時(shí),發(fā)射信號表示為Vemcos(2πfemt),其中,Vem和fem分別為發(fā)射信號的幅值和頻率。待測射頻回波信號表示為Vechocos[(2π(fem+fd)t)],其中Vecho為回波信號的幅值,fd為回波信號的多普勒頻移。經(jīng)過I/Q下變頻之后,輸出的光電流即含有所需的頻移信息,可表示為
iup(t)∝cos(2πfdt-45°) ,
(8)
idown(t)∝cos(2πfdt+45°) 。
(9)
利用式(8)和式(9)得到的低頻DFS信號,經(jīng)過AD采樣后,進(jìn)一步通過數(shù)字信號處理計(jì)算得到DFS頻移信息,而通過兩個(gè)通道的信號的相位差,可以識(shí)別出多普勒頻移的符號。從而實(shí)現(xiàn)了一個(gè)方向可分辨的多普勒頻移測量系統(tǒng)。
隨后,將所提出的微波光子I/Q下變頻系統(tǒng)應(yīng)用于射頻信號相位偏移測量。待測射頻信號可以表示為VRFcos(2πfRFt+φUDT),其中,VRF和fRF為射頻信號的幅值和頻率,φUDT為待測相位。當(dāng)本振信號的頻率被設(shè)置為fLo=fRF時(shí),經(jīng)過光電探測后,即可以得到待測相位項(xiàng),兩個(gè)通道輸出的信號可以分別表示為
iup(t)∝cos(φUDT-45°) ,
(10)
idown(t)∝cos(φUDT+45°) 。
(11)
將I/Q通道的輸出的電信號相結(jié)合,通過數(shù)字信號處理即可得到待測相位,從而實(shí)現(xiàn)了微波光子鑒相。
2 實(shí)驗(yàn)結(jié)果
2.1 實(shí)驗(yàn)設(shè)置
在實(shí)驗(yàn)中通過半導(dǎo)體激光器(DenseLight,NL-MB-CLS15-010-P1-FA-10-09)生成波長約為1 549.9nm、功率為12 dBm的光載波。光載波隨后輸入到四端口光耦合器的端口1,光耦合器端口3連接MZM(Fujitsu,F(xiàn)TM7937)的輸入端口,光耦合器端口4連接MZM的輸出端口。由兩臺(tái)微波信號發(fā)生器(HP,83640A;Agilent,E8257D)生成本振信號和待測信號。這兩個(gè)信號分別輸入到調(diào)制器的兩個(gè)射頻端口,如圖1所示。通過調(diào)節(jié)直流源(Gwinstek,GDP-4303S)對MZM的工作點(diǎn)進(jìn)行控制。將EDFA(Qnoptics,QN-PE-M-P25)設(shè)置為自動(dòng)功率控制模式,輸出功率固定為16 dBm。所使用的多通道DWDM(AWG,AAWG-C325C41GAX4-04)的通道間距為50GHz,鄰信道隔離度大于32dB。兩個(gè)光電探測器(Discovery SemiConductor,DSC20H)的響應(yīng)度為0.7 A/W,工作帶寬為20 GHz。
2.2 實(shí)驗(yàn)設(shè)置
首先,使用兩臺(tái)微波信號發(fā)生器生成功率為10 dBm、頻率為20 GHz的本振信號以及功率為0 dBm、頻率為20.01 GHz的射頻回波信號,計(jì)算多普勒頻移為1 MHz。兩個(gè)射頻信號分別連接MZM的兩個(gè)射頻端口。通過直流穩(wěn)壓電源調(diào)整MZM的偏壓相位,使兩個(gè)輸出信號的相位差為90°。實(shí)驗(yàn)中,通過示波器測量了兩個(gè)通道輸出信號的波形,其結(jié)果如圖2(a)所示。

(a) 輸出信號波形(1 MHz)
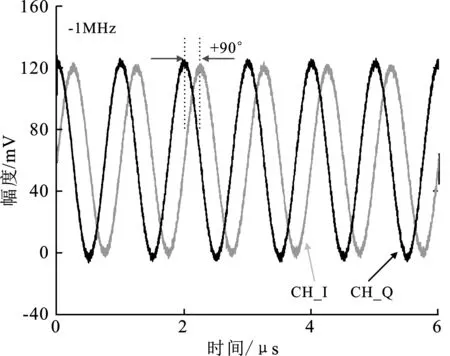
(c) 輸出信號波形(-1 MHz)
然后用Matlab對所采集到的時(shí)長0.5 s的波形進(jìn)行計(jì)算,其結(jié)果如圖2(b)所示。僅使用CH_I或CH_Q通道輸出的信號可以判斷多普勒頻移大小,但無法判斷DFS的符號方向。在實(shí)驗(yàn)中通過結(jié)合兩個(gè)通道的信號,根據(jù)兩個(gè)信號之間的相位差來判斷多普勒頻移的符號方向。由圖2(a)所示,由于CH_Q中的DFS信號比CH_I中的DFS信號超前90°,因此多普勒頻移的方向符號為正。隨后將回波信號的頻率設(shè)置為 9.999 GHz,則多普勒頻移為-1 MHz,通過對輸出信號的采集和計(jì)算后,輸出結(jié)果如圖2(c)、(d)所示。由圖2(c)可得,由于CH_Q中的DFS信號比CH_I中的多普勒頻移信號落后90°,因此多普勒頻移的方向符號為負(fù)。
由于本方案采用全光架構(gòu),相比于電子測量系統(tǒng)在工作帶寬上有著極大的優(yōu)勢,為了驗(yàn)證該優(yōu)勢,隨后在實(shí)驗(yàn)中對工作頻率為10~40 GHz范圍內(nèi)的微波信號進(jìn)行了測量。首先,發(fā)射信號的頻率固定為 10 GHz,將回波信號的頻率從9.999 9 GHz以20 kHz步進(jìn)調(diào)至9.000 1 GHz,模擬-100~100 kHz的多普勒頻移范圍。經(jīng)過光電探測后,將示波器采集到的信號數(shù)據(jù)發(fā)送到計(jì)算機(jī),通過MATLAB計(jì)算出DFS的值。計(jì)算出的多普勒頻移和測量誤差如圖3(a)所示。測量誤差范圍為-6~2 Hz。隨后,依次將發(fā)射信號的工作頻率調(diào)至20、30和40 GHz,所測得多普勒頻移和測量誤差分別如圖3(b)~(d)所示。在10~ 40 GHz的工作頻率范圍內(nèi),多普勒頻移測量的最大誤差小于8 Hz,從而驗(yàn)證了該系統(tǒng)在10~40 GHz的超寬帶范圍內(nèi)擁有很高的測量精度。

(a) 載波頻率為10 GHz

(c) 載波頻率為30 GHz
2.3 相移測量
由于實(shí)驗(yàn)中缺少精確的寬帶移相器,因此通過仿真對本系統(tǒng)在相移測量中的應(yīng)用進(jìn)行了驗(yàn)證。仿真基于VPItransmissionMaker軟件,所有基本參數(shù)都根據(jù)多普勒頻移測量中的實(shí)驗(yàn)參數(shù)設(shè)定。激光二極管生成頻率為1 549.9 nm、平均功率為12 dBm、相對強(qiáng)度噪聲為-160 dB/Hz的連續(xù)光載波。MZM的半波電壓設(shè)為3.5 V,插入損耗設(shè)為6 dB。由兩個(gè)信號發(fā)生器生成一個(gè)20 GHz的本振信號和一個(gè)20 GHz的相位可調(diào)待測信號。本振信號和待測信號的功率分別設(shè)置為10 dBm和0 dBm。兩個(gè)射頻信號分別連接MZM的兩個(gè)射頻端口。通過控制調(diào)制器的工作點(diǎn),將兩個(gè)通道輸出信號的相位差調(diào)至90°。隨后,將被測信號的相位從0°以2°為步進(jìn)調(diào)至360°,模擬0°到360°的相位偏移變化范圍。用兩臺(tái)信號分析儀對兩個(gè)通道的輸出信號進(jìn)行分析,其結(jié)果如圖4(a)所示。將所采集到的信號輸入到Matlab中進(jìn)行相移計(jì)算,其結(jié)果如圖4(b)所示,在0°~360°的相位偏移變化范圍內(nèi),相移的測量最大誤差小于7°。

(a) 兩個(gè)通道輸出信號功率隨待測相位的變化曲線
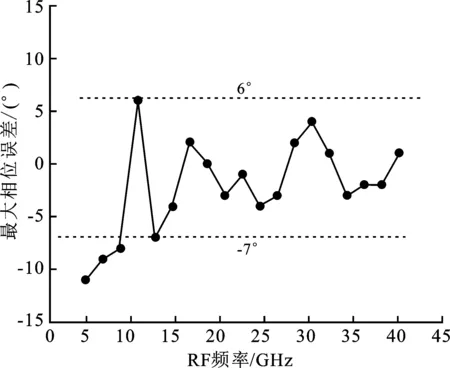
圖5 最大相位測量誤差隨工作頻率變化曲線
在仿真中對本系統(tǒng)的工作帶寬進(jìn)行了分析。將本振信號的載波頻率設(shè)置為4 GHz,根據(jù)本振信號頻率設(shè)置待測信號頻率,將待測信號的相位從0°以2°為步進(jìn)調(diào)節(jié)至180°,記錄0°~180°范圍內(nèi)的最大測量誤差;隨后,依次將本振信號和待測信號的工作頻率從4 GHz以2 GHz為步進(jìn)調(diào)至40 GHz測量,最大測量誤差隨載頻變化的曲線如圖5所示。在10~40 GHz的工作頻率范圍內(nèi),相位偏移測量最大誤差范圍為-7°~6°,當(dāng)工作頻率低于10 GHz時(shí),測量最大誤差明顯增大。這是由于在低工作頻率時(shí),該系統(tǒng)的變頻增益受到DWDM截止頻率的限制而降低,而變頻增益的降低導(dǎo)致了輸出信號信噪比的下降,進(jìn)而影響到了測量精度。
3 討 論
筆者所提出的基于Sagnac環(huán)和I/Q探測的全光微波測量方案,由于光子技術(shù)的應(yīng)用使該方案在帶寬和抗電磁干擾方面具有很大的優(yōu)勢。由圖3所示的實(shí)驗(yàn)結(jié)果驗(yàn)證,在10~40 GHz的工作頻率范圍內(nèi),對1 MHz的多普勒頻移進(jìn)行測量,所測得的多普勒頻移的誤差最大為8 Hz。此外,如圖5所示的結(jié)果所驗(yàn)證,在10~40 GHz的工作頻率范圍內(nèi),對相位偏移進(jìn)行仿真測試,所測得的相位偏移的誤差最大為7°。
隨后將文中方案與其他文獻(xiàn)所報(bào)道的微波光子測量方案從工作頻率范圍、測量功能、優(yōu)點(diǎn)和局限性方面進(jìn)行比較,結(jié)果如表1所示。文中方案在工作帶寬方面相比于其他方案有較大優(yōu)勢,這是由于文中方案沒有使用存在嚴(yán)格的頻率依賴性的器件,如文獻(xiàn)[9]中使用的高非線性光纖,或文獻(xiàn)[14]中使用的90°電耦合器。在文中方案中,載波信號的低工作頻率主要受到DWDM器截止頻率的限制,而高工作頻率主要受到調(diào)制器帶寬的限制。而商用調(diào)制器的帶寬可以達(dá)到100 GHz。因此,使用更大帶寬的調(diào)制器可以大幅度地提高文中方案的工作范圍。

表1 幾種光子微波信號測量的性能比較
4 結(jié)束語
筆者提出了一種基于Sagnac環(huán)和I/Q探測的微波光子多普勒頻移及相位偏移測量方案,并對其進(jìn)行了仿真和實(shí)驗(yàn)驗(yàn)證。文中方案在10~40 GHz的超寬工作頻率范圍內(nèi)實(shí)現(xiàn)了對多普勒頻移和相位偏移的高精度測量,最大多普勒頻移測量誤差為8 Hz,最大相移測量誤差為7°。本方案在工作帶寬、測量精度等方面的顯著優(yōu)勢,使其在未來寬帶電子測量系統(tǒng)中極具應(yīng)用潛力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
