基于改進的DPC算法的ZDJ9轉轍機異常數據挖掘
2022-05-27 06:21:14李智宇
鐵路通信信號工程技術 2022年5期
李智宇
(北京全路通信信號研究設計院集團有限公司,北京 100070)
1 概述
ZDJ9型轉轍機是為國內鐵路提速的需求而研制的,具有轉換力大、效率高等特點。既可用于多點牽引分動外鎖閉道岔的轉換,也可用于尖軌聯動的內鎖閉道岔轉換,一般多用于客運專線,其缺陷與損害直接影響列車的安全可靠運行[1]。轉轍機如果出現異常,很可能導致脫線、脫軌、追尾等重大事故,危及行車安全。目前,對轉轍機的故障診斷主要依靠維護人員的理論知識和現場經驗,故障識別時間較長、效率低且誤判、漏判現象時有出現。因此,轉轍機故障診斷具有十分重要的意義。
多年來,國內外的學者們在轉轍機故障診斷方面進行一些研究,但都存在各自的優缺點。Eker OF等人把支持向量機方法應用于道岔故障診斷[2],關瓊利用果蠅優化算法提高支持向量機方法的計算速度,完成道岔故障類型識別[3],但是支持向量機方法并不適用于多種故障的分類。Atamuradov V等人構建了專家系統,能夠識別道岔是否正常運行以及兩種類型的故障[4],張智等人將專家系統應用于電液轉轍機故障診斷[5]。專家系統的局限性在于轉轍機的工作條件千差萬別,導致故障模式和故障原因多樣,專家經驗很難全面地將所有故障進行歸納總結。與專家系統相比,基于神經網絡的故障診斷具有學習能力,無需構造完善的先驗知識庫,如Chen J和李雅美等人建立了基于模糊神經網絡的道岔故障識別系統[6-7],但這種方法需要大量的訓練樣本進行學習才能獲取良好的故障診斷結果,而道岔故障類型多樣,大大延長學習時間。為提高故障診斷速度,肖蒙和王林潔等人將貝葉斯網絡應用于轉轍機故障診斷,基于粗糙集約簡的思想,對屬性進行約簡,從而簡化貝葉斯網絡結構,減少算法的復雜性,提升計算速度[8-9],這一方法的缺點在于需要確定適當的先驗概率,然而先驗概率很難確定。劉新發和李孟瀾等人將聚類分析方法用于轉轍機故障診斷,可以同時識別多種故障[10]。聚類分析為無監督學習方法,不需要提前訓練模型,但是現有的絕大部分聚類分析方法,需要提前給定分類數,對于實際工況下的數據,具體分幾類很難提前確定。
鑒于以上研究現狀,本文針對ZDJ9轉轍機動作電流數據的特點提出一種改進的DPC聚類分析算法來識別異常數據。本文的主要貢獻:1)與一些經典的聚類分析方法(如K-means方法、基于層次的聚類分析方法、模糊聚類分析方法)相比,本文提出的算法可以自動分類,不需要提前設定分類數目,需要提前確定的參數難度相對較小;2)與傳統的DPC算法相比,對于現場運行的ZDJ9轉轍機動作電流數據而言,本文提出改進的DPC算法更容易識別異常數據,運算速度更快;3)本文提出的DPC算法簡潔明快,能夠識別各種形狀的類簇。
2 轉轍機動作電流曲線分析
ZDJ9型道岔的電動機采用交流三相電源,道岔的正常轉換過程:解鎖-轉換-鎖閉,相應的動作電流曲線可分為:解鎖區-轉換區-鎖閉區-緩放區,如圖1所示。
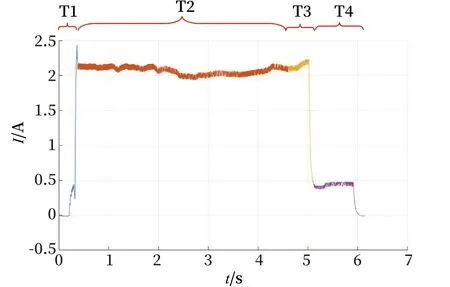
圖1 ZDJ9轉轍機正常動作電流曲線Fig.1 Normal action current curve of ZDJ9 switch machine
T1(解鎖區):道岔啟動電流較大,完成道岔解鎖過程。在此過程中,電機剛啟動時,有一個很大的啟動電流,同時產生較大的轉矩,道岔進入解鎖狀態,經齒輪組及摩擦聯結器使滾珠絲向順(逆)時針方向旋轉,從而使滾珠絲杠上的螺母向左(右)側運動,轉轍機動作桿帶動鎖閉桿運動,直到實現外鎖閉裝置解鎖,但尖軌不動,此刻電機負載很小,電流曲線迅速回落,道岔進入轉換過程。
T2(動作區):該時段為道岔的轉換過程。在這個過程中滾珠絲杠上的推板套繼續運動,從而帶動尖軌運動。如果動作電流平滑,表明轉換阻力小;如果動作電流略微增大,表明轉換阻力大,交流轉轍機很難從電流大小判斷轉換阻力的大小。
T3(鎖閉區):此時道岔進入鎖閉過程。這一過程為道岔尖軌被帶動到另一側,尖軌與基本軌密貼,內鎖閉塊彈出,切斷動作電路。其動作電流曲線為尾部平滑迅速下降。
T4(緩放區):第4時段為1DQJ(第1道岔啟動繼電器)緩放的階段。道岔轉換完畢,速動開關組中的接點轉換到規定位置,斷開啟動電路,1DQJ自閉電路斷開進入緩放狀態。在1DQJ緩放時間內,啟動電路中X1線纜仍有電流,這是由于道岔到位后自動接點接通室外的表示電路,此時1DQJ還在緩放中,ZDJ9轉轍機電源380 V還在向外輸電,X1線纜經室外表示電路溝通回路,從而產生電流。此時的“小臺階”長短取決于1DQJ的緩放時間,電流值大小取決于表示回路電阻,一般為0.5 A左右。
3 DPC算法轉轍機異常數據挖掘方法
3.1 數據特征提取
轉轍機一次動作所采集的動作電流數據點的個數為5 000多個,若把采集到的動作電流數據直接作為數據集進行分類,將加大計算復雜程度,延長計算時間。因此,首先對動作電流數據進行特征提取,降低數據維度。針對ZDJ9轉轍機轉換時動作電流數據的特點,根據經驗選取初值、終值、最大值、轉換時間作為特征參數,這樣就大大降低了運算量。
3.2 特征數據歸一化
不同的特征指標有不同的量綱或者不同的量級,這樣的情況會影響到數據分析的結果,為了消除指標之間的量綱影響,需要進行數據標準化處理,以解決指標之間的可比性。原始數據經過歸一化處理后,各指標處于同一數量級,適合進行綜合對比評價。本文采用離差標準化方法,對原始數據進行線性變換,使結果值映射到[0,1]之間,轉換函數如公式(1)所示。其中,x為原始數據,xmax為數據集中最大值,xmin為最小值,x*為歸一化后的值。

3.3 改進的DPC算法
本文算法是在傳統的DPC算法基礎上改進后提出的,把局部密度大的點作為聚類中心,可以自行得出聚類數目,適用于各種形狀的類簇。鑒于現場運行的ZDJ9轉轍機動作電流數據具有特征值集中的特點,認為在數據集中,聚類中心在其所處的位置局部密度最大,它周圍圍繞著的數據點的局部密度均低于聚類中心自身的局部密度,且這些圍繞著局部密度較低的數據點距離其他的擁有高局部密度的聚類中心較遠。該算法需要計算兩個量,局部密度ρi和距離δi,計算公式如公式(2)所示。
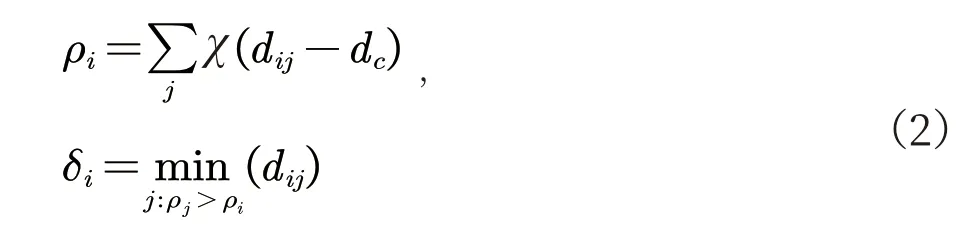
其中,dij表示第i個數據點和第j個數據點間的距離,本文使用的是歐式距離。dc為截斷距離,局部密度ρi表示第i個數據點周圍與其距離小于dc的數據點個數。距離δi表示與第i個數據點間的距離最小的、局部密度大于它的數據點的距離。對于自身局部密度最大的數據點,同時擁有較大局部密度ρi和較大距離δi的數據點,就是聚類中心點,而對于局部密度ρi較小,距離δi卻較大的異常點,將其分為一類。改進的DPC算法具體過程如表1所示。
如表1所示,改進的DPC算法和傳統的DPC算法的區別在于第5步對局部密度ρi較小、距離δi較大點的處理。傳統的DPC方法將這樣的點分配給比它們局部密度大的最近聚類中心所在的類簇中,

表1 兩種DPC算法Tab.1 Two kinds of DPC algorithms
本文提出的算法則將所有的這些異常點劃分為新的一個類簇。與傳統的DPC算法相比,本文提出算法的優勢:1)能夠更準確的識別故障。這是由于對現場運行的轉轍機,絕大部分情況下在正常運行,所以,采集到的動作電流數據的特征值大多聚集在聚類中心附近。而局部密度ρi較小、距離δi較大的數據點,往往對應運行異常的情況。因此,利用本文提出的算法,可以更準確的識別異常數據。2)運算速度更快。因為算法進行到第5步后,利用本文提出的算法,不需要為剩余每個點尋找自身的類簇,因此,相比于傳統的DPC算法,本文提出的算法運算速度更快。
4 實驗驗證及結果分析
選取中國北方某客運站某臺ZDJ9轉轍機3 400次道岔轉換的動作電流數據為實驗數據,來驗證算法的可行性。
如圖2所示,為確保采集動作電流數據的完整性,現場采集動作電流數據往往從轉換前一段時間開始至轉換完成一段時間后結束,每組數據采集5 300多個電流值,所以首先需要找到每組數據的轉換起始點和結束點,提取整個轉換過程的數據,通過這種方式還找出138組傳感器調試階段采集不完整的數據,如圖3所示。
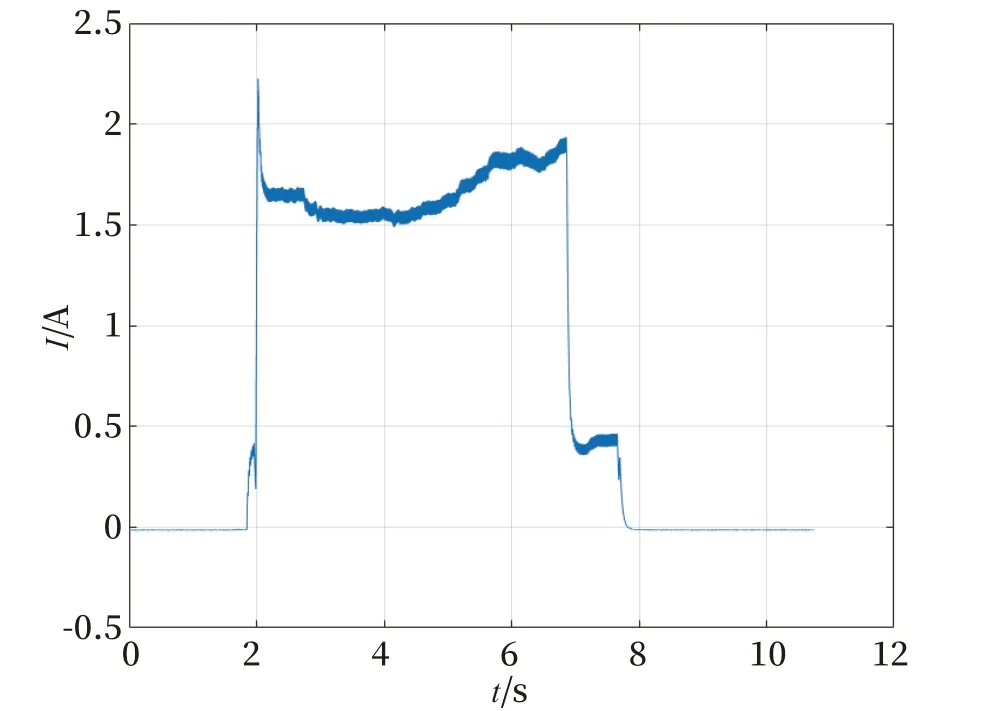
圖2 ZDJ9轉轍機現場采集動作電流曲線Fig.2 Site acquired action current curve of ZDJ9 switch machine
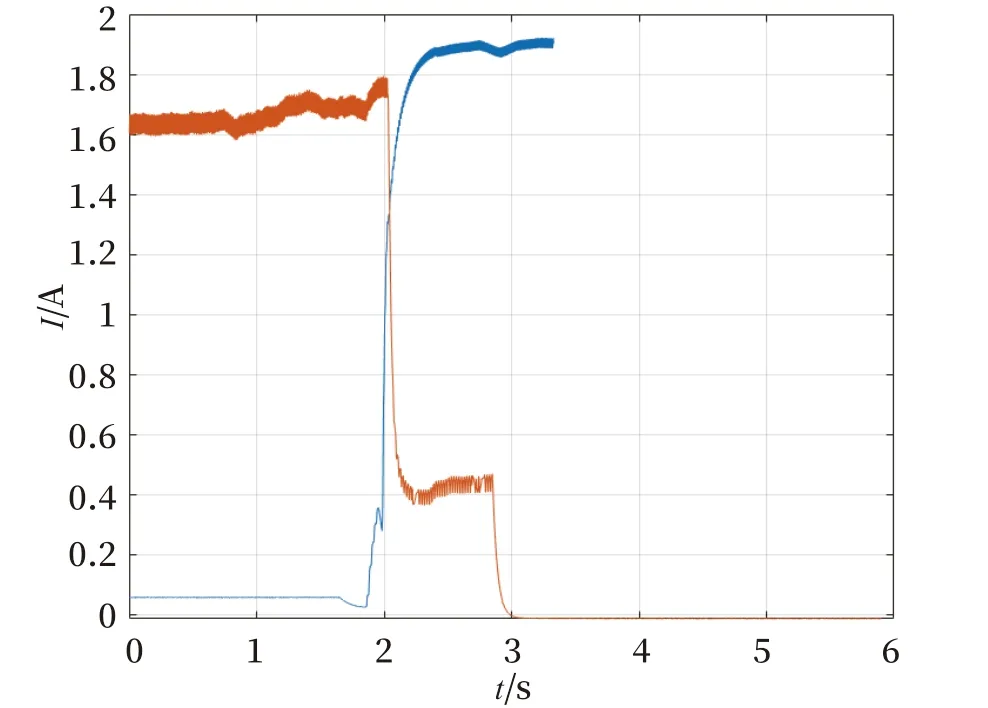
圖3 ZDJ9轉轍機現場采集不完整動作電流曲線Fig.3 Site acquired incomplete action current curve of ZDJ9 switch machine
利用前面提出的數據挖掘方法處理剩余的3 262組數據。首先對每組轉換數據分別選取初值、終值、轉換時間、最大值作為其特征值,這樣就達到了降維的目的;然后,根據公式(1)對特征數據進行歸一化處理;最后利用改進的DPC算法對數據進行分類,如圖4所示,數據被分為3類。
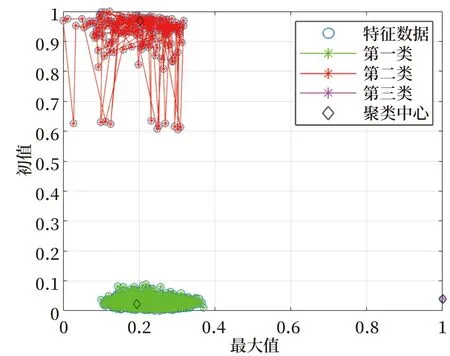
圖4 改進的DPC算法分類結果Fig.4 Improved DPC algorithm classification result
其中,第1類包含3 048組數據,為屬于正常數據,其動作電流曲線如圖5所示;第2類包含213組數據,為傳感器調試初期的數據,其動作電流曲線如圖6所示,與正常數據相比這類數據在解鎖區電流曲線沒有明顯回落;第3類只有一組數據,其動作電流曲線如圖7所示,可以發現,與正常數據相比,電流最大值較大,在解鎖區電流增大和回落更明顯,轉換時間較短。
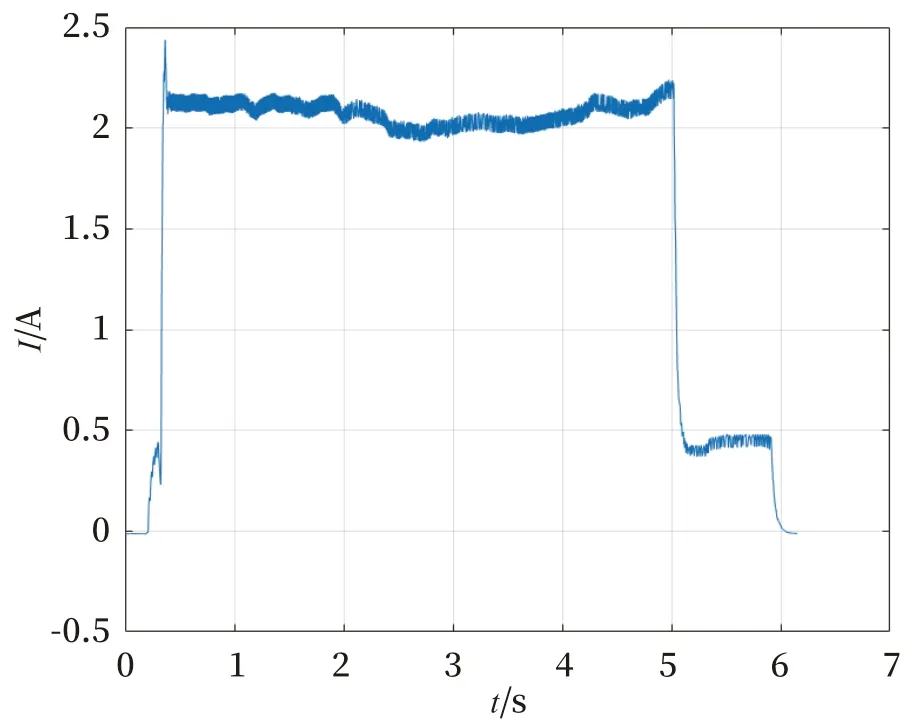
圖5 第一類動作電流曲線Fig.5 The first type of action current curve
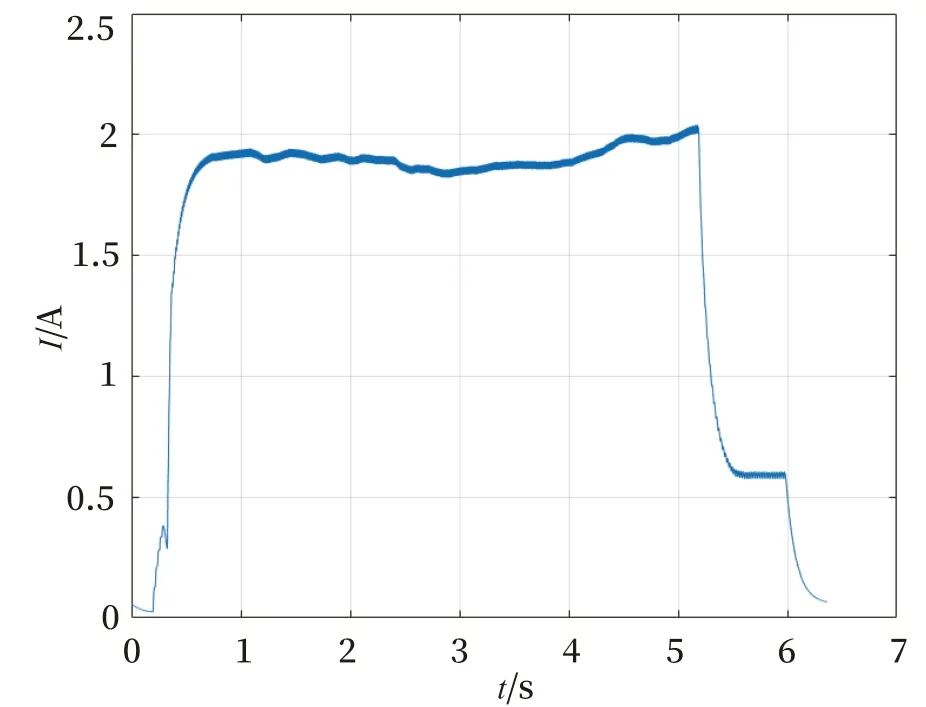
圖6 第二類動作電流曲線Fig.6 The second type of action current curve
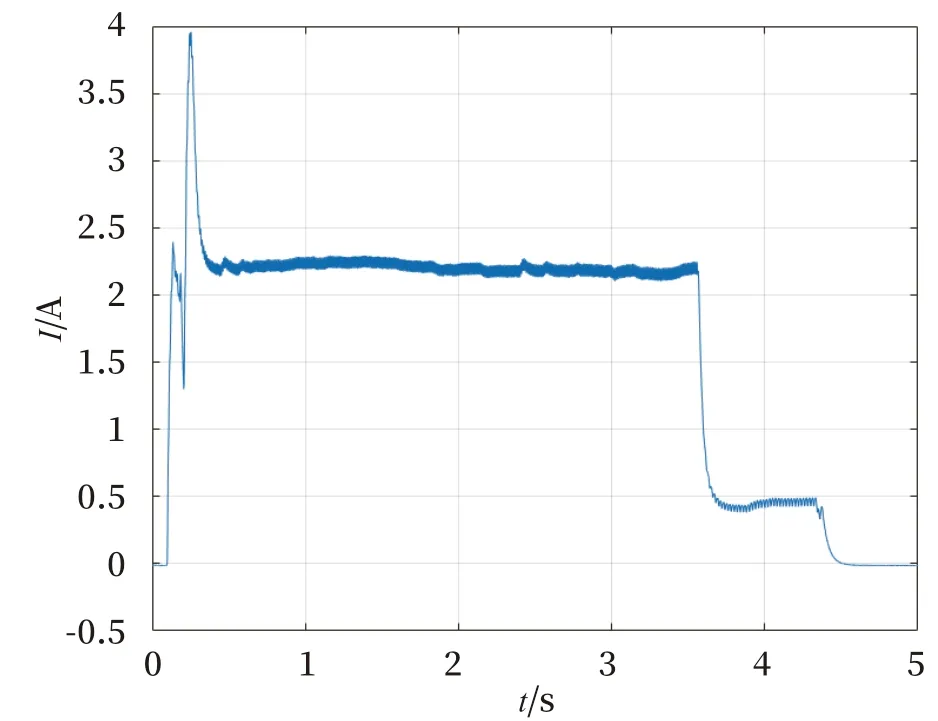
圖7 第三類動作電流曲線Fig.7 The third type of action current curve
為與傳統的DPC算法進行對比,用傳統的DPC算法對以上數據進行分類,分類結果如圖8所示。可以發現,利用傳統的DPC算法,異常數據與正常數據分為一類,而利用本文提出的算法,可以更好的識別異常數據。
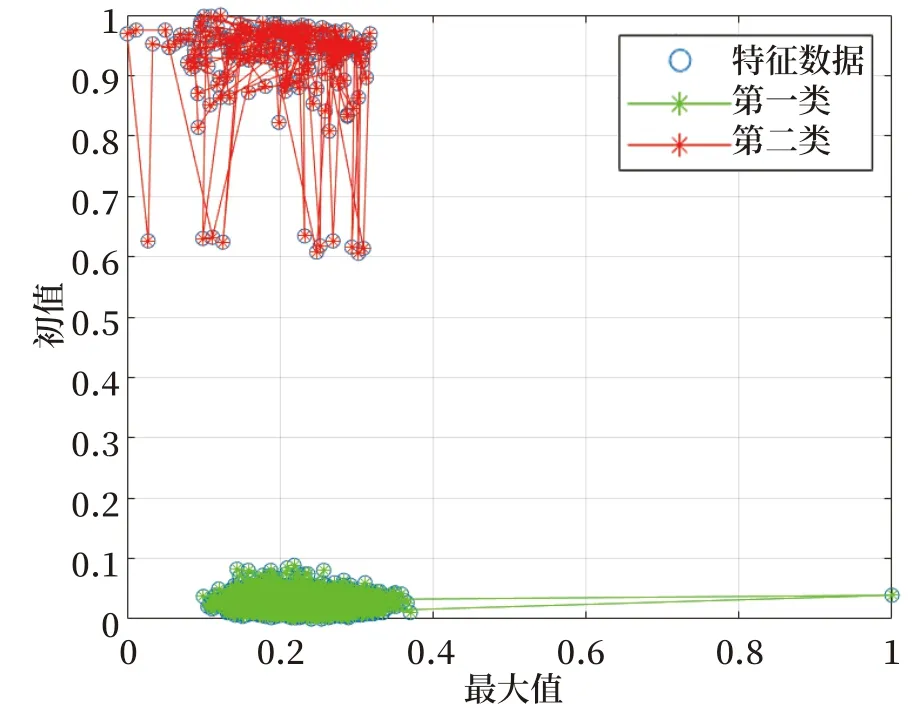
圖8 傳統DPC算法分類結果Fig.8 Traditional DPC algorithm classification result
5 結論
本文針對ZDJ9轉轍機故障診斷智能化不足的現狀,根據ZDJ9轉轍機動作電流數據特點,提出一種改進的DPC異常數據挖掘方法。通過利用該算法對現場試驗數據的處理,實現了對數據的合理分類和異常數據的準確識別,驗證了該算法的可行性和有效性。但由于現場實際工況較為復雜,造成異常的原因存在多樣性和不確定性,故障模式與分類算法的映射關系有待進一步研究,這也是下一步的工作研究重點。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
裝備制造技術(2020年3期)2020-12-25 05:22:30
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
振動、測試與診斷(2014年5期)2014-03-01 01:14:21