基于CATIA的水果采摘器運(yùn)動(dòng)模型參數(shù)化建模方法研究
2022-05-27 16:13:08木海達(dá)趙錫鋒陳哲權(quán)
木海達(dá) 趙錫鋒 陳哲權(quán)

摘? 要:采用CATIA設(shè)計(jì)并制作一種角度自調(diào)式水果采摘器。利用CAITA DMU模塊,完成內(nèi)剪式剪刀機(jī)構(gòu)主運(yùn)動(dòng)剪刀的運(yùn)動(dòng)仿真,輸出內(nèi)剪式剪刀機(jī)構(gòu)相互運(yùn)動(dòng)結(jié)合點(diǎn)的曲線;利用CATIA二次曲線開(kāi)發(fā)功能,完成從動(dòng)剪刀片的運(yùn)動(dòng)結(jié)合處滑動(dòng)槽設(shè)計(jì),將虛擬仿真技術(shù)與機(jī)構(gòu)運(yùn)動(dòng)分析有效結(jié)合。通過(guò)實(shí)物驗(yàn)證了該采摘器機(jī)構(gòu)運(yùn)行平穩(wěn),為廣大果農(nóng)采摘樹(shù)上水果提供了一種有效采摘輔助工具,具有一定推廣價(jià)值。
關(guān)鍵詞:CATIA;水果采摘器;DMU;剪刀機(jī)構(gòu);運(yùn)動(dòng)仿真
中圖分類號(hào):TP391.9;TH132.44? ? ? ?文獻(xiàn)標(biāo)志碼:A? ? ? ? ? ? ? ?文章編號(hào):1672-0105(2022)01-0069-03
The Parametric Modeling Method Study of Fruit Picking Motion Model Based on CATIA
MU Haida ZHAO Xifeng CHEN Zhequan
Abstract:? A fruit picking device which could adjust certain angle are designed and producted with CAITA software. Based on CAITA DMU module, the motion simulation of main movement scissors which are included in the shear mechanism with inside shearing style was finished. The mutual movement curve of combining point of shear mechanism was also exported. Using the secondary curve development function of CATIA, the sliding groove design of moving junction of driven? shearing blades was finished, which combined the virtual simulation technology with effective mechanism motion analysis. Through the physical verification, the picking device works steadily, which provides an effective auxiliary picking tool for orchardman when picking fruits in the tree. The fruit picking device has had a certain application value.
Key Words:? CATIA; fruit picking device; DMU; scissors mechanism; motion simulation
引言
采摘機(jī)器人是未來(lái)智能農(nóng)業(yè)機(jī)械化的發(fā)展方向之一,具有廣闊的應(yīng)用前景[1],從20世紀(jì)40年代初開(kāi)始,美國(guó)、英國(guó)、法國(guó)等西方國(guó)家就已經(jīng)開(kāi)始研究水果采摘機(jī)械,特別是在大型農(nóng)用采摘機(jī)械方面,自動(dòng)化和智能化程度日益提升[2],已經(jīng)在實(shí)踐應(yīng)用中獲得了高度認(rèn)可和肯定,如德國(guó)、日本、法國(guó)和荷蘭等國(guó)家相繼立項(xiàng)研究了采摘蘋(píng)果、柑橘、番茄、西瓜和葡萄等智能機(jī)器人[3],但這些高端采摘機(jī)械裝備造價(jià)十分昂貴,普通農(nóng)戶可望不可及[4]。
國(guó)內(nèi)水果種植多分布于山區(qū)、丘陵地帶,且種植相對(duì)零散,不利于機(jī)械化集中采摘,除了少數(shù)果園配備半機(jī)械化輔助裝置,基本上停留在傳統(tǒng)采摘方式上[5]。對(duì)于市場(chǎng)出現(xiàn)的輔助水果采摘器械,普遍存在缺點(diǎn)分析:(1)采摘效率不高;(2)水果直接從樹(shù)上被硬拉下來(lái),水果蒂部會(huì)被拉傷,原樣的保證率不高;(3)采摘角度不可調(diào)節(jié),無(wú)法適應(yīng)水果采摘角度變換需求。
1? 水果采摘器整體結(jié)構(gòu)設(shè)計(jì)
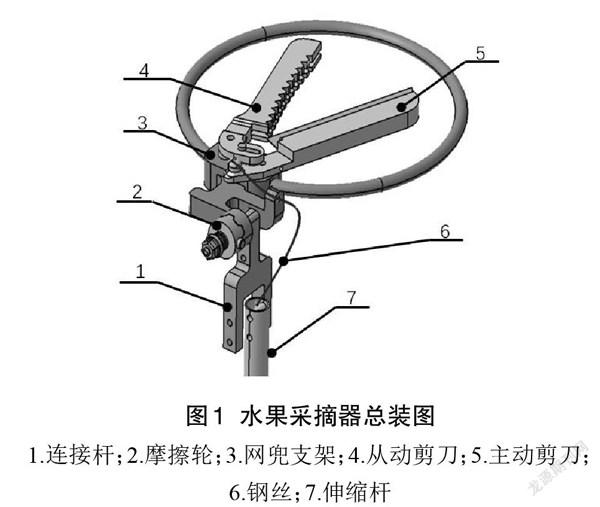
針對(duì)果農(nóng)使用需求,所要解決的技術(shù)關(guān)鍵點(diǎn):(1)提供一種可修剪水果蒂的水果采摘裝置;(2)可自動(dòng)調(diào)節(jié)采摘角度;(3)能夠采摘樹(shù)枝高處水果;(4)實(shí)現(xiàn)水果摘下后快速存儲(chǔ)。為此設(shè)計(jì)并制作出了一款角度自調(diào)式水果采摘器,輔助果農(nóng)采摘水果,其主要結(jié)構(gòu)如圖1所示。
1.1 內(nèi)剪式剪刀機(jī)構(gòu)設(shè)計(jì)
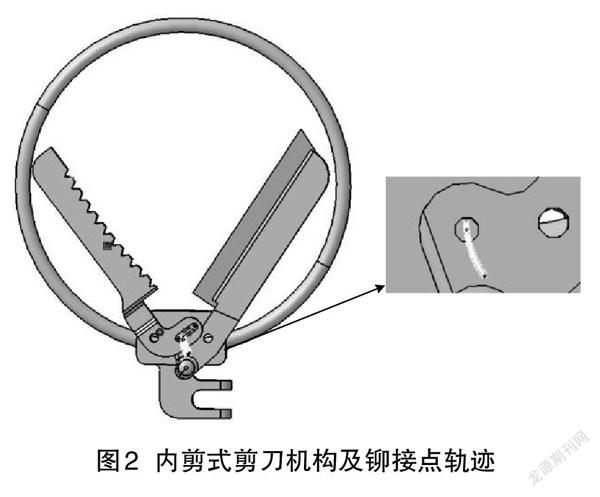
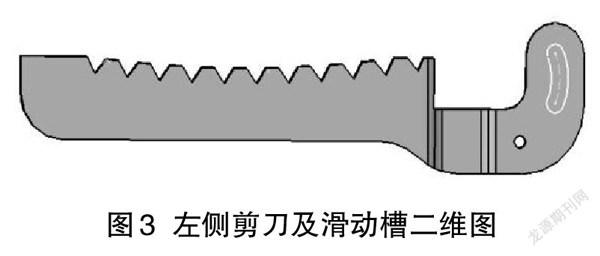
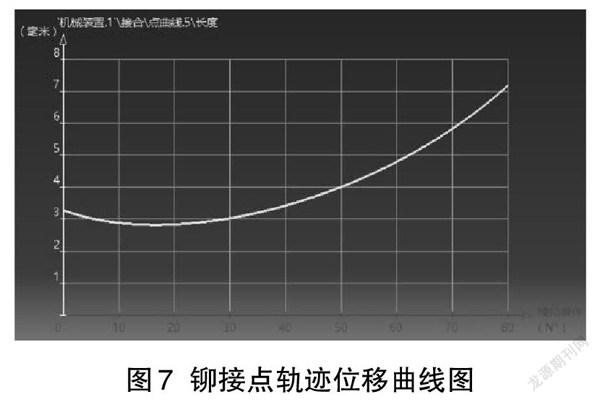
鋼絲繩牽引拉動(dòng)的內(nèi)剪式剪刀機(jī)構(gòu)如圖2所示,設(shè)計(jì)步驟:(1)設(shè)計(jì)網(wǎng)兜框和主運(yùn)動(dòng)剪刀;(2)運(yùn)用CATIA軟件DMU生成鉚接點(diǎn)軌跡線,如圖2局部放大圖所示;(3)利用CATIA二次曲線開(kāi)發(fā)功能[6],將鉚接點(diǎn)軌跡線提取并復(fù)制到左側(cè)剪刀滑動(dòng)槽二維圖上,完成從動(dòng)剪刀片運(yùn)動(dòng)結(jié)合處滑動(dòng)槽的設(shè)計(jì),如圖3所示;(4)DMU仿真運(yùn)行剪刀機(jī)構(gòu),調(diào)整各裝配件。
1.2 角度自調(diào)式結(jié)構(gòu)設(shè)計(jì)
樹(shù)上采摘水果時(shí),需要時(shí)常調(diào)整采摘角度,同時(shí)不同的果樹(shù)樹(shù)枝韌性有所區(qū)別,這需要采摘器具有可以調(diào)整轉(zhuǎn)動(dòng)力的功能,因此需要設(shè)計(jì)開(kāi)發(fā)一套角度自調(diào)式結(jié)構(gòu)。具體裝配如圖4所示。該機(jī)構(gòu)由彈簧、摩擦輪組和轉(zhuǎn)動(dòng)軸組成。
工作原理:摩擦輪1與轉(zhuǎn)動(dòng)軸通過(guò)銷(xiāo)釘連接,銷(xiāo)釘限制在軸上槽里滑動(dòng),摩擦輪2與網(wǎng)兜剛性連接,轉(zhuǎn)動(dòng)軸與連接桿由半月槽限制轉(zhuǎn)動(dòng)。當(dāng)螺母擰緊,摩擦輪1、2間摩擦力增大,即增加網(wǎng)兜轉(zhuǎn)動(dòng)力,反之減小網(wǎng)兜轉(zhuǎn)動(dòng)力。
1.3 柔性輸送布袋
為能夠快速、有效摘取樹(shù)上果子,輸送到果籃內(nèi),設(shè)計(jì)了一款水果柔性輸送布袋。在布袋內(nèi)側(cè)加入一套錐形收縮口布袋,布袋選材具有摩擦力大、具有一定彈性的布料,布袋口上裝上松緊帶,使其具有調(diào)節(jié)錐形口大小的功能,能夠根據(jù)水果實(shí)物大小,進(jìn)行相應(yīng)布袋口大小的調(diào)整;由于采摘的高度不同,伸縮桿的長(zhǎng)度在不斷變化,布袋的長(zhǎng)度也要隨時(shí)更改,因此布袋的結(jié)構(gòu)實(shí)現(xiàn)了拆裝的效果,布袋與布袋之間的連接通過(guò)拉鏈完成。如圖5所示。
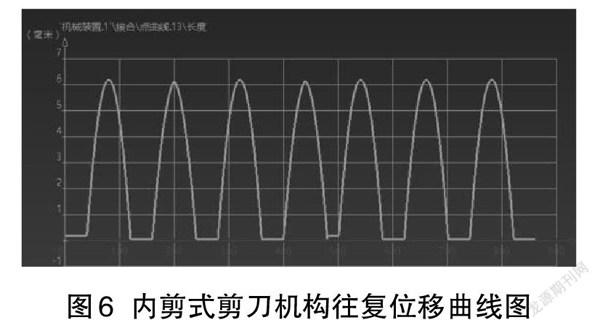
2? 虛擬樣機(jī)運(yùn)動(dòng)分析
應(yīng)用CATIA軟件下的DMU模塊,對(duì)該水果采摘器進(jìn)行虛擬樣機(jī)運(yùn)動(dòng)分析,構(gòu)建之間各部件均以實(shí)物制作要求進(jìn)行約束定義。通過(guò)軟件檢查運(yùn)動(dòng)干涉,輸出內(nèi)剪式剪刀機(jī)構(gòu)和網(wǎng)兜支架旋轉(zhuǎn)機(jī)構(gòu)運(yùn)動(dòng)曲線圖。如圖6-7所示,內(nèi)剪式剪刀機(jī)構(gòu)位移曲線順滑過(guò)度,位移約0~6 mm,與鉚接點(diǎn)軌跡位移基本一致。
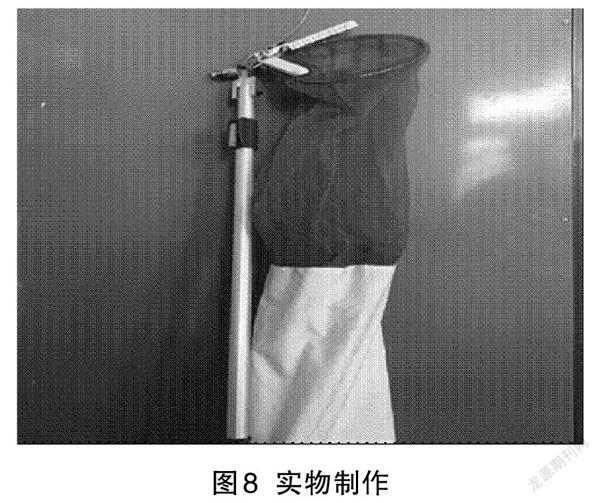
3? 實(shí)物驗(yàn)證
依據(jù)虛擬樣機(jī)1:1比例制作出如圖8所示實(shí)物。經(jīng)實(shí)地采摘驗(yàn)證,發(fā)現(xiàn)采摘如蘋(píng)果、梨和柑子等大個(gè)體水果時(shí),樹(shù)枝較密處,網(wǎng)兜支架旋轉(zhuǎn)控制有難度,內(nèi)剪式剪刀剪水果蒂效果較好;對(duì)于采摘如枇杷、橘子和棗子等小個(gè)體水果時(shí),因水果生長(zhǎng)密集,不容易單個(gè)摘下,經(jīng)常需要將小樹(shù)枝一起剪下。
4? 結(jié)論
(1)利用CAITA軟件DMU模塊、二次曲線開(kāi)發(fā)、虛擬仿真和機(jī)構(gòu)運(yùn)動(dòng)分析等功能,可以快捷、有效進(jìn)行機(jī)械產(chǎn)品結(jié)構(gòu)設(shè)計(jì)和優(yōu)化;
(2)通過(guò)實(shí)物多次驗(yàn)證,該采摘器運(yùn)行平穩(wěn),能為廣大果農(nóng)采摘樹(shù)上水果提供一種有效采摘輔助工具,具有一定推廣價(jià)值;
(3)網(wǎng)兜支架過(guò)大,輸送布袋容易被樹(shù)枝勾住,導(dǎo)致采摘樹(shù)枝密集處水果時(shí),容易被樹(shù)枝阻擋,需要調(diào)小網(wǎng)兜支架,尋找不容易被樹(shù)枝勾住的光滑布料作為輸送布袋外部材料。
收稿日期:2021-12-05
作者簡(jiǎn)介:木海達(dá)(1988—),男,浙江溫州人,本科,浙江人馳汽車(chē)配件有限公司總經(jīng)理、工程師,研究方向:機(jī)械設(shè)計(jì)與制造;趙錫鋒(1982—),男,浙江紹興人,碩士,浙江工貿(mào)職業(yè)學(xué)院副教授,研究方向:機(jī)械設(shè)計(jì);陳哲權(quán)(1993—),男,浙江溫州人,碩士,浙江工貿(mào)職業(yè)技術(shù)學(xué)院助教,研究方向:機(jī)械設(shè)計(jì)。