基于智能數據融合的車內噪聲主動控制算法*
2022-05-21 13:04:04劉寧寧孫躍東王巖松孫裴郭輝
汽車技術 2022年5期
劉寧寧 孫躍東 王巖松 孫裴 郭輝
(1.上海理工大學,上海 200093;2.上海工程技術大學,上海 201620)
主題詞:車內噪聲 噪聲主動控制 智能數據融合 參考信號
1 前言
傳統的被動控制技術對車內中高頻(≥500 Hz)噪聲控制十分有效,但無法控制低頻噪聲。主動噪聲控制(Active Noise Control,ANC)基于信號的相消干涉原理實現,十分適合控制低頻噪聲,已被很多車型采用。ANC 系統根據是否有參考信號可分為前饋系統和反饋系統。常用的ANC 前饋系統利用一個參考傳感器接收初級噪聲源的信號,信號經噪聲主動控制器濾波后,由揚聲器發出振幅相同、相位相反的次級聲源來降低初級噪聲,再利用誤差傳感器接收殘余噪聲信號,傳遞至控制器的濾波器進行自適應調整,從而保證誤差傳感器的區域噪聲降至最低。
ANC 系統不僅可降低車內噪聲,還可改變噪聲頻譜,完善車內聲品質。目前ANC 的研究主要集中在新型控制算法的開發和算法性能優化上,使算法收斂速度、計算復雜度和均方誤差間的匹配達到最優。在ANC系統中,時域最小均方(Least Mean Square,LMS)算法及其改進算法應用最為廣泛,如變步長LMS(Variable Step-Size LMS,VSS-LMS)算法、濾波-x LMS(Filter-x LMS,FxLMS)算法、變步長FxLMS(Variable Step-Size FxLMS,VSS-FxLMS)算法等。這些改進算法在平穩和非平穩噪聲的處理中具有簡單、魯棒和有效的特點,能夠自適應地跟蹤環境的變化,但均建立在準確提供參考信號的基礎上。參考信號作為主動控制算法的重要輸入之一,直接影響算法的控制效果。汽車ANC 系統中傳統的參考信號獲取方法是在乘員耳側安裝傳聲器,此方法不可避免地引入了次級聲源的二次污染,不利于系統的快速收斂。車輛怠速或低速行駛時車內噪聲源主要為發動機,ANC 系統多以發動機轉速作為參考信號;車輛中速行駛時車內噪聲源主要來自輪胎與路面的激勵即路噪,針對路噪,ANC系統多以副車架或懸架系統上的振動信號作為參考信號。但隨著車速的提高,車內噪聲源中風激勵即風噪的比例逐漸增大,針對風噪,ANC系統參考信號目前還沒有較好的實現方案。
本文采集車輛在不同工況下的車內外噪聲、振動、發動機轉速等信號,根據前期研究基礎判斷不同工況下與駕駛員耳側噪聲相關性大的測點信號,然后根據發動機轉速信號和車外測點信號進行數據融合作為參考信號,再利用IVS-FxLMS 算法對駕駛員耳側噪聲進行主動控制。
2 IVS-FxLMS算法

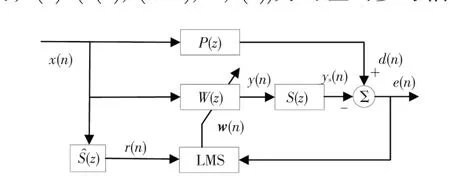
圖1 FxLMS算法框圖
FxLMS 算法以()的最小均方為準則,依據最速下降法的原理進行迭代。控制器的輸出信號為:

式中,()=((1),(2),…,())為濾波器的系數向量;為其長度;()=((),(-1),…,(1))為對應的參考信號。
控制器的輸出信號()傳遞至誤差傳感器處時,有:

式中,*表示線性卷積運算;()為()的單位脈沖響應。誤差信號()可表示為:

控制器的輸入信號即濾波參考信號()為:

自適應更新濾波器()的系數為:

式中,為步長因子,使得濾波器系數向目標函數的梯度反方向更新迭代一步。
的選擇會影響算法的收斂速度和最小均方誤差,其收斂范圍為:

式中,為濾波器輸入信號向量()自相關矩陣的最大特征值。
在主動控制算法中,步長參數選取越大,算法收斂速度越快,但是相應的算法穩態誤差也會增大,如果選用較小的步長參數,算法穩態誤差得以減小,但算法收斂速度會相應變慢。針對這一問題,研究人員提出了許多變步長ANC算法和思想。由于車內噪聲環境具有時變復雜性,ANC 算法容易受噪聲影響。為了彌補這一不足,文獻[16]建立了步長參數與迭代次數間的非線性函數,設計了迭代變步長FxLMS(Iterative Variable Step-size FxLMS,IVS-FxLMS)算法。算法中的步長參數隨迭代次數的增大而逐漸減小,從而避免噪聲等因素的影響。步長參數()與迭代次數的函數式為:
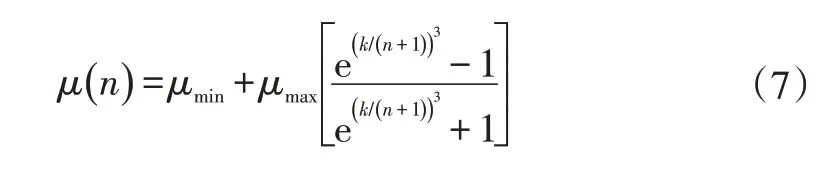
式中,、分別為根據算法收斂條件設置的步長參數最小、最大值;為根據控制結果的不同需要設置的調整參數,控制步長參數隨迭代次數變化的快慢程度。
假設=0.05,=0.9,分別取10、50 和100 時,()與的函數曲線如圖2所示。從圖2中可以看出,步長參數隨迭代次數單調遞減,決定曲線遞減的速度,、需要通過試驗確定最優值。
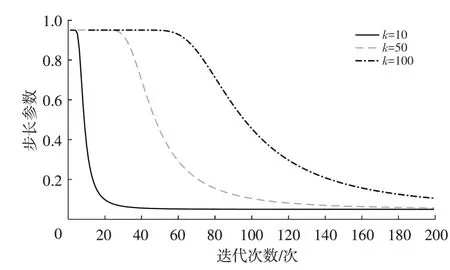
圖2 迭代變步長參數變化曲線
綜上,IVS-FxLMS自適應濾波器權系數迭代公式為:

3 基于智能數據融合的主動控制算法
智能數據融合是基于現代計算機技術,通過將布置在不同位置的不同類型的傳感器信號和信息源數據加以組合分析,發揮組合優勢,對所需對象做出準確估計的復雜處理過程。本文將發動機轉速信號、振動信號和麥克風噪聲信號進行融合作為參考信號。
如圖3 所示為基于智能數據融合的主動控制FxLMS算法框圖,首先根據傳遞路徑分析(Transfer Path Analysis,TPA)結果從眾多傳感器中選出與車內乘員耳側噪聲相關性大的信號,(),(),…、(),(),…表示信號傳遞至乘員耳側路徑的單位脈沖響應,則參考信號可表示為:
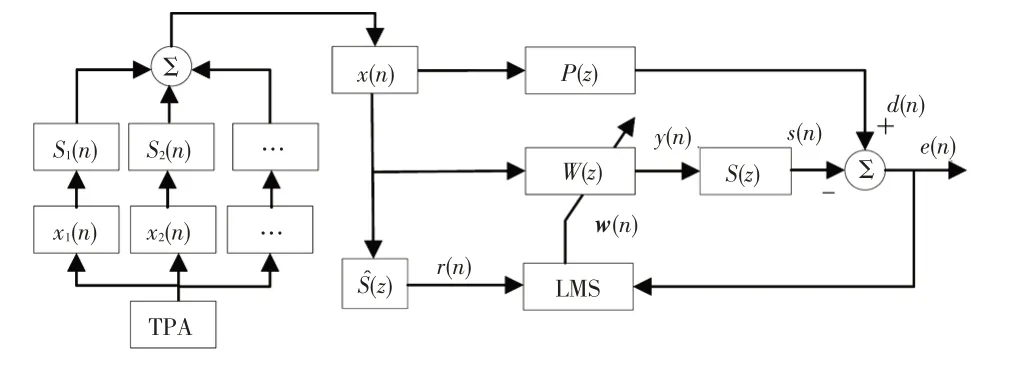
圖3 基于智能數據融合的FxLMS算法框圖

式中,,,…為信號幅值調節系數。
每個幅值調節系數的值需要根據試驗獲得,選取的每個參考信號對應目標點噪聲信號的不同頻段,根據該頻段降噪的效果調節幅值大小,直至獲得最優的控制效果。
TPA通過對機械系統中的能量傳遞路徑分析來確定各路徑的激勵源對響應位置的噪聲(振動)貢獻量,是一種分析噪聲源貢獻大小的有效方法,不僅可以找到噪聲源,而且可以通過貢獻量排序找到其中主要的噪聲。
4 仿真分析
4.1 噪聲數據采集和分析
本文根據ISO 5128:2014、GB 1495—2002、GB/T 18697—2002等標準和文獻[20]制定試驗方案。車內噪聲測點在乘員耳側,車外噪聲測點選取風噪聲較為集中的A柱、后視鏡等位置,振動測點選取發動機懸置點,數據采集過程中同時記錄發動機轉速信號。數據采集試驗包括高速公路試驗和半消聲室試驗。高速公路試驗采集怠速、60 km/h、80 km/h、100 km/h、120 km/h 勻速工況下車外噪聲和振動測點激勵源信號,以及車內人員耳側噪聲信號。半消聲室試驗采集車外選定測點到車內人員耳側路徑的全局傳遞函數。測點布置如圖4所示。
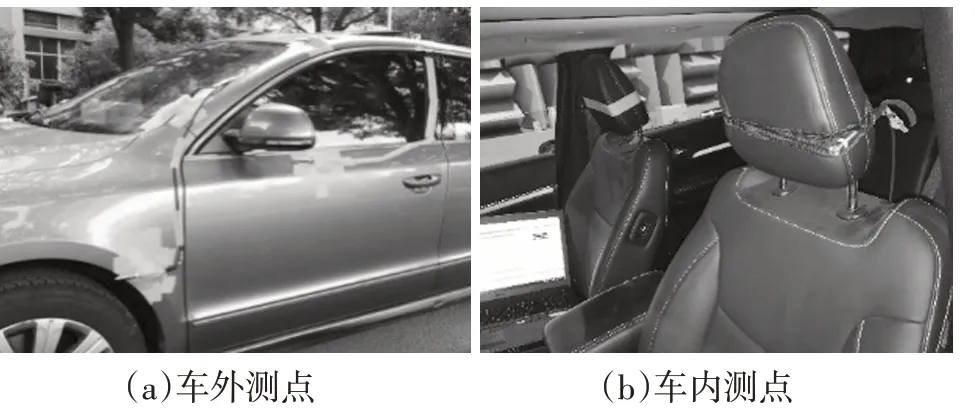
圖4 測點設置
對采集到的數據進行處理分析,圖5所示為不同工況下駕駛員右耳側噪聲頻譜。從圖5中可以看出,當車輛處于不同速度工作狀態時,耳側噪聲能量主要集中在中低頻(500 Hz以下),100~500 Hz頻率段有明顯的小波峰,頻帶分布特征適合采用噪聲主動控制方法。
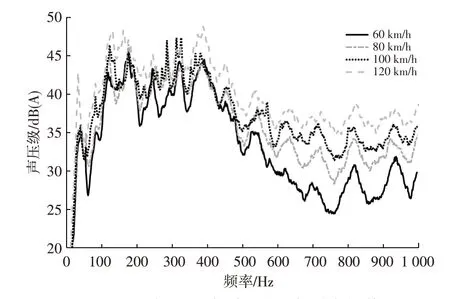
圖5 不同工況下駕駛員右耳側噪聲頻譜
對采集到的數據進行傳遞路徑分析,結果表明:隨著車輛從低速進入高速狀態,乘員耳側噪聲的主要聲源由發動機噪聲變為A 柱風噪聲和輪胎輻射噪聲。汽車高速行駛時,A 柱、后視鏡、輪轂的風噪以及輪胎輻射噪聲是乘員耳側峰值頻率噪聲的主要噪聲源。在噪聲能量集中頻段(20~2 000 Hz),前輪、A 柱和后視鏡風噪對乘員耳側噪聲貢獻量較大,而且隨著車速的提高,其在總貢獻量中的占比逐漸增大。圖6 所示為車速80 km/h 工況下各噪聲源對駕駛員耳側噪聲的貢獻量譜。從圖6中可以看出,左、右A柱底端和左、右后視鏡位置對乘員耳側噪聲貢獻量較大。
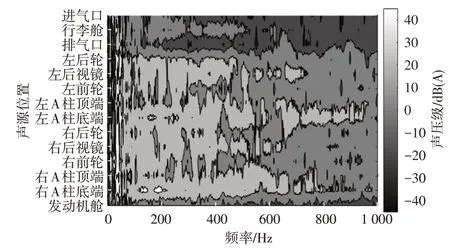
圖6 80 km/h車速下各噪聲源對駕駛員耳側噪聲的貢獻量頻譜
4.2 主動控制結果分析
根據算法利用MATLAB 編寫程序對采集的車內噪聲進行主動控制仿真。次級路徑通過低通濾波器模擬獲得,如圖7所示為模擬得到的長度為512的次級路徑單位脈沖響應,圖8為其頻域特性。
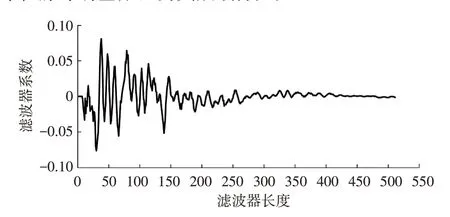
圖7 次級路徑單位脈沖響應
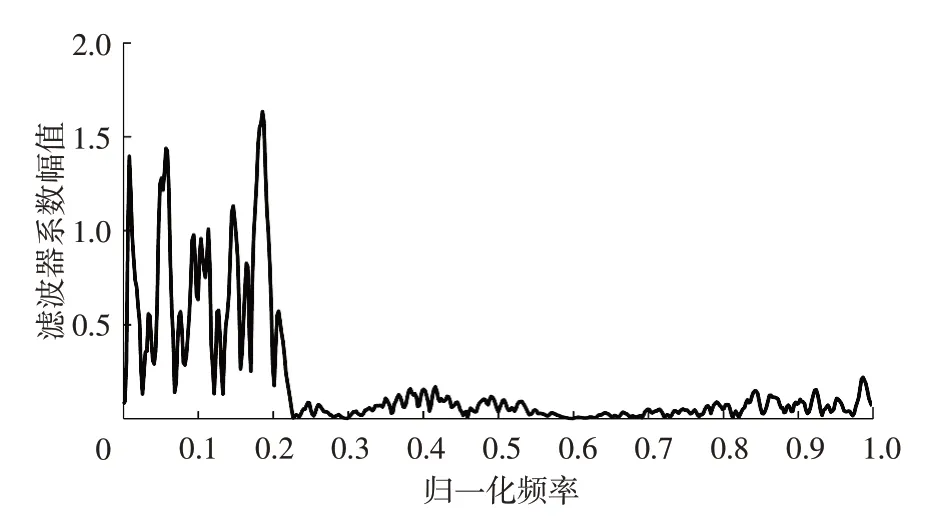
圖8 次級路徑單位脈沖響應頻域特性
針對80 km/h 的車速工況,選取駕駛員右耳側為主動控制目標點進行仿真。分析此工況下的噪聲頻譜特征,根據發動機轉速信號判斷發動機的2階噪聲頻率為54 Hz(4階和6階噪聲不明顯),根據階次頻率生成正弦信號作為參考信號。調整IVS-LMS 算法中的參數,直到算法對目標點信號的控制效果達到最佳狀態,此時=0.04,=0.4,=40。經主動控制后,原始噪聲信號和殘余噪聲信號頻域對比如圖9所示。從圖9中可以看出,54 Hz 處的峰值消失,其他頻段噪聲基本沒有變化。雖然54 Hz 處的峰值降低了約15 dB(A),但由于其他峰值基本沒有變化,因此總的聲壓級控制前、后沒有變化。
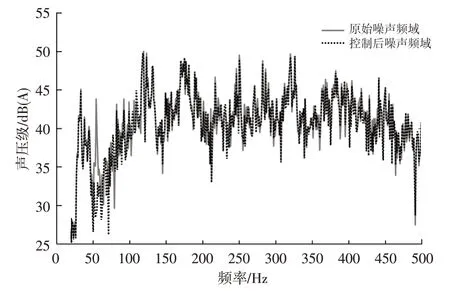
圖9 發動機轉速作為參考信號的主動控制效果
按照本文提出的基于智能數據融合的主動控制FxLMS 算法編寫MATLAB 控制程序。首先根據傳遞路徑分析結果選出在80 km/h車速工況下與駕駛員右耳側噪聲相關性大的信號(左A柱底端、右A柱底端、左后視鏡、右后視鏡、發動機噪聲),根據這些信號和式(9)擬合出參考信號,設置各信號的幅值調節系數為1,然后根據控制后的各頻率段降噪效果調整幅值系數,最終左、右A柱底端幅值調節系數為0.3,左、右后視鏡幅值調節系數為0.2,發動機噪聲根據轉速信號判斷階次噪聲頻率。主動控制達到最優效果時,IVS-FxLMS 算法中=0.03,=0.5,=40。經主動控制后,原始噪聲信號和殘余噪聲信號頻域對比結果如圖10所示。從圖10中可以看出,500 Hz內的峰值頻段明顯降低。主動控制后噪聲總聲壓級降低了4.4 dB(A)。

圖10 數據融合作為參考信號的主動控制效果
5 結束語
在車內噪聲主動控制過程中,為解決參考信號在車內容易受到次級聲源污染和以發動機轉速信號作為參考只能控制發動機階次噪聲的問題,本文提出了基于車輛不同工況和車外測點信號進行智能數據融合作為參考信號的噪聲主動控制方法。對某車輛不同工況下車內、車外測點信號進行數據采集,利用MATLAB編寫控制程序,以80 km/h車速工況下駕駛員右耳測點信號為控制目標點進行仿真。采用發動機轉速信號擬合的參考信號只對發動機2階54 Hz處噪聲有較好的控制效果,主動控制前、后噪聲總聲壓級沒有變化。采用本文所提出的算法擬合的參考信號,500 Hz以下噪聲峰值頻率點都有明顯的控制效果,并且主動控制后噪聲總聲壓級降低了4.4 dB(A),證明本文所提出的算法能夠抑制汽車車內噪聲。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
