深海生物原位保溫保壓裝置設計方案研究*
2022-05-20 08:07:04趙飛虎周鑫濤
機械研究與應用 2022年2期
許 可,趙飛虎,周鑫濤,羅 升
(中國船舶科學研究中心 深海載人裝備國家重點實驗室,江蘇 無錫 214082)
0 引 言
深海生物科學研究、深海資源勘探等深海作業活動變得日趨頻繁,從而引領水下裝備的快速發展,其中纜控潛器(ROV)和載人潛水器是當前海洋探索研究最主要的工具,其可搭載各種探測設備快速、精確地到達各種深海復雜環境,進行高效勘探、科學考察和近海底取樣作業[1-2]。然而目前通過深海潛器采集的各類深海生物存儲在采樣籃后,隨著深海潛器的回收,樣品也隨其從深海提升至水面母船上,由于深海潛器從深海回收至水面母船大都需要耗費數小時的時間,并且在深海潛器從深海回收至水面的過程中,深海生物所處的外界海水壓力在逐漸下降,溫度在逐步上升,造成轉移過程中深海生物的生物學特性已經發生了改變,失去了生物的原位特性,甚至喪失了試驗室觀測、培養及研究的價值[3]。現階段國內外科學家在深海生物原位保真取樣的技術領域僅實現了微生物的半主動保壓和被動保溫的技術突破[4-5],但該項技術的局限性較明顯,無法實現多深度樣品及長周期的保真存儲。深海生物原位主動保壓及主動保溫技術的突破可以實現深海采集的各類樣品從采集開始至提取到地面實驗室分析前始終維持其原位特性,從而為深海生命科學探索和生物資源開發利用提供新的技術手段。
筆者重點研究了深海生物原位主動保壓和主動保溫的技術方法和工作流程,通過對該裝置存儲耐壓結構的計算分析以及溫控系統、保壓系統和監控系統的設計,得出了基于潛水器搭載的深海生物原位保溫保壓裝置的技術方案,為潛水器多深度采集的生物樣品的長周期原位保真存儲提供了參考。
1 深海生物原位保溫保壓裝置主要組成
深海生物原位保溫保壓裝置主要由耐壓殼體、啟閉艙口蓋、溫控系統、保壓系統、監控系統組成如圖1所示,其中耐壓殼體是深海生物原位保溫保壓裝置最主要的存儲容器結構,承受外側及內部高壓海水的壓力,并承載所有掛載設備和儀器的重量,是整個裝置的主體;啟閉艙口蓋可以實現自動開啟、關閉和鎖緊,啟閉艙口蓋的鎖緊和密封是整個裝置保溫和保壓效果實現的關鍵;溫控系統主要實現裝置的保溫功能,其工作原理為熱電制冷,利用半導體制冷片進行控溫,主要用來精確控制殼體內的海水及樣品溫度,以維持原位采集樣品的溫度特性;保壓系統主要由以充滿高壓氮氣的補償器和連接電磁溢流閥的儲水箱構成,前者可以在裝置采樣上浮后補償耐壓殼體內降低的壓力,后者能在裝置采樣下潛時卸掉耐壓殼體收縮導致的內部增大的壓力。

圖1 深海生物原位保溫保壓裝置組成
2 主要技術指標及功能要求
2.1 主要技術指標
工作深度:0~1 500 m;保壓范圍:0~15 MPa;保溫范圍:0~10 ℃。
2.2 功能要求
深海生物原位保溫保壓裝置在深海特定深度完成采樣后,能夠對采集的樣品進行存儲,并持續保溫和持續保壓。為實現上述功能,裝置需具備可調節溫度范圍的保溫功能,具備樣品原位壓力的保持功能,以及具有一定容積的樣品存儲功能,并具有內部壓力和內部溫度的實時監測功能,同時裝置需具備艙口蓋的自動啟閉功能。
3 技術方案
3.1 耐壓殼
耐壓殼是深海生物原位保溫保壓裝置最主要的耐壓結構,承受外側及內部高壓海水的壓力,并承載所有掛載設備和儀器的重量,是整個裝置的主體,外形呈球狀,底部焊接有安裝基座。外形如圖2所示。
耐壓殼內部直徑:φ1 200 mm;艙口蓋開孔透光直徑:φ450 mm;穿艙件開孔透光直徑:φ200 mm;耐壓殼材料:00Cr25Ni7Mo4N(雙相不銹鋼2507),屈服強度550 MPa,抗拉強度795 MPa,彈性模量200 GPa,泊松比0.3。
深海生物原位保溫保壓裝置的最大工作水深是1 500 m,而耐壓殼既承受內壓也承受外壓,所以取計算壓力為1.5倍最大工作壓力,即22.5 MPa。按GJB/Z21A-2001規范《潛艇結構設計計算方法》,球形耐壓結構最小厚度計算見下式:
tm=PjRc/(0.8σs)
(1)
式中:tm為球殼最小厚度;Pj為計算壓力;σs為屈服強度;Rc為球殼部分的中面半徑,600+0.5tm。
因此,計算可知最小厚度為31.5 mm,設計厚度同樣取31.5 mm。
在Abaqus軟件中對耐壓殼體進行有限元計算,為便于計算,降低模型復雜程度,在幾乎不影響整體計算結果的前提下,對整體模型進行了適當的結構簡化,模型采用C3DR8實體單元進行計算分析,并保證所有厚度方向單元個數不少于4個,單元尺寸小于20 mm。載荷邊界條件:整體模型非開孔位置施加計算壓力,開孔位置壓力載荷采用面積等效辦法在開孔周邊密封面等安裝面施加等效壓力載荷,如圖3所示。

圖2 耐壓外殼 圖3 邊界條件及載荷情況
耐壓殼體在22.5 MPa外壓作用下的應力響應結果如圖4所示,從圖中可看出耐壓殼體整體在22.5 MPa外壓作用下,最高應力為407.2 MPa,主要分布在出入艙口蓋圍欄與球殼連接處艙內側,其余連接開孔等連接過度處的典型位置應力水平均小于309.6 MPa。耐壓殼體在22.5 MPa內壓作用下的應力響應結果如圖5所示。
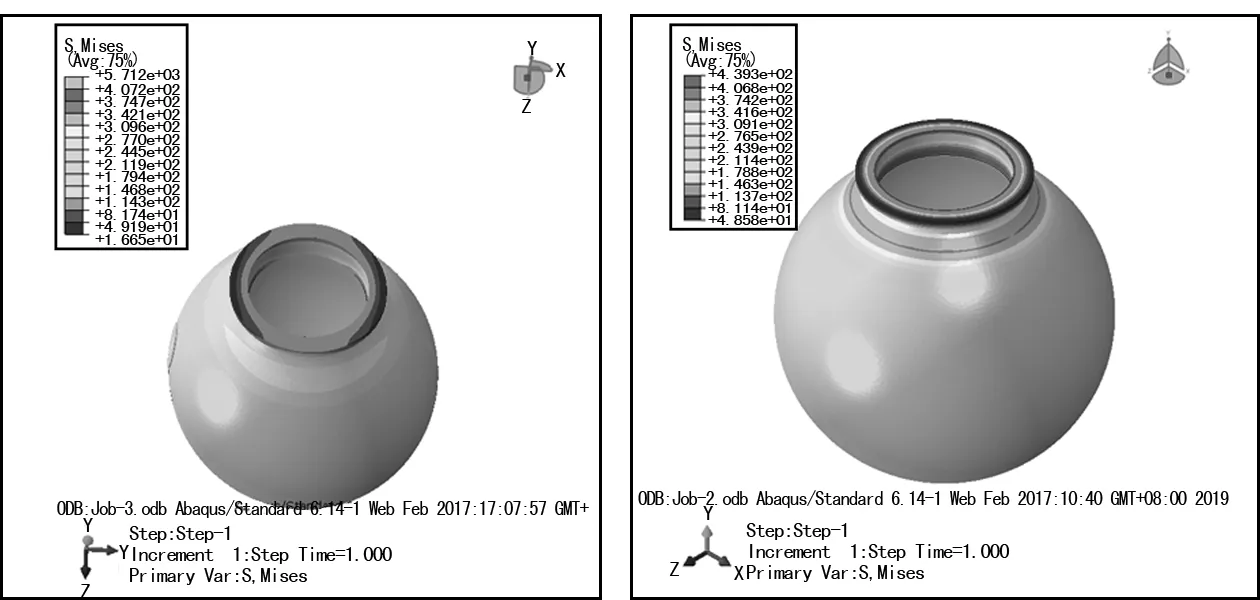
圖4 22.5 MPa外壓下應力云圖 圖5 22.5 MPa內壓下應力云圖
從圖中可看出耐壓殼整體在22.5 MPa內壓作用下,最高應力為439.3 MPa,主要分布在出入艙口蓋圍欄與球殼連接處艙內側,其余連接開孔等連接過度處的典型位置應力水平均小于309.1 MPa。從分析的結果可以看出耐壓殼體在承受22.5 MPa內壓和外壓下,最高應力為439.3 MPa,滿足小于1.15σs(632.5 MPa)的要求。
3.2 啟閉艙口蓋
啟閉艙口蓋主要由球冠形蓋板、壓緊環、密封件、回轉支撐板、回轉軸座、鎖緊環、鎖緊電動缸、電動缸基座I、基座齒圈、回轉軸、回轉臂、啟閉電動缸、電動缸基座II、啟閉接近開關和鎖緊接近開關組成,通過驅動啟閉電動缸和鎖緊電動缸可以實現艙口蓋的啟閉和鎖緊與解鎖,并根據到位接近開關的反饋信號判斷艙口蓋是否關閉到位和鎖緊到位。啟閉艙口蓋的系統組成如圖6所示。

圖6 啟閉艙口蓋系統組成圖1.球冠形蓋板 2.壓緊環 3.密封件 4.回轉支撐板 5.回轉軸座 6.鎖緊環 7.鎖緊電動缸 8.電動缸基座I 9.基座齒圈 10.回轉軸 11.回轉臂 12.啟閉電動缸 13.電動缸基座II
工作原理:啟閉艙口蓋具有自動啟閉功能和自動鎖緊功能,自動啟閉功能由啟閉電動缸、回轉臂、回轉軸、回轉支撐板和球冠蓋板組成的“曲柄導桿”機構實現的,通過啟閉電動缸的伸縮完成球冠蓋板的開啟和關閉動作;自動鎖緊功能由鎖緊電動缸、鎖緊環和基座齒圈組成的“曲柄導桿”機構實現的鎖緊環旋轉,進而控制鎖緊環與球冠蓋板相應螺旋齒面的接觸與分離,從而達到密封件的壓縮與恢復的目的,完成啟閉艙口蓋自動鎖緊和解鎖動作。
啟閉艙口蓋解鎖與開啟狀態如圖7所示,關閉與鎖緊狀態如圖8所示。

圖7 開啟時狀態 圖8 閉合時狀態
其中出入艙口的透光直徑為φ450 mm,球冠形蓋板頂部的半徑R設計取值1 200 mm,艙口蓋的材料采用00Cr25Ni7Mo4N(雙相不銹鋼2507),其名義屈服強度ReH為550 MPa,彈性模量E=200 GPa,工作壓力為15 MPa,安全系數取1.5,計算壓力Pj=22.5 MPa。按照《潛水系統與潛水器建造與入級規范》[6]第16章 潛深大于500 m的潛水器的補充規定:在初步設計階段,封頭的極限承壓可按《潛水系統與潛水器建造與入級規范》中4.6.4確定。殼體厚度t具體計算過程如下:
(2)
式中:Pj為計算壓力,MPa;R為蓋板殼體外半徑,設計取值1 200 mm;ReH為屈服強度,MPa。
考慮腐蝕余量1.5 mm和板的厚度偏差等因素,并從艙口蓋的可靠運行角度出發,取一定的安全裕度,艙口蓋的殼板厚度取值t=34 mm。
接下來對艙口蓋蓋板的穩定性進行校核,艙口蓋蓋板穩定性校核公式為Pcr=CSCZPe≥Pj,查《潛水系統與潛水器建造與入級規范》確定C值:

查《潛水系統與潛水器建造與入級規范》確定CS、CZ值:

蓋板穩定性校核:Pcr=CSCZPe=70.95 MPa,該值大于Pj=22.5 MPa,滿足穩定性校核公式。
3.3 溫控系統
溫控系統的功能是控制取樣后裝置內溫度為取樣深度的原位溫度。溫控系統制冷原理為熱電制冷,利用半導體制冷片進行控溫。圖9為制冷單元在裝置耐壓殼體外的上半球部分布置圖,上下半球共布置18套制冷單元(每套:TEC制冷片4片、散熱翅片1個、吸熱冷板1個、外殼1個、補償器1個),每個制冷單元4個制冷片串聯工作。圖10為制冷單元內部結構圖,外殼為導熱系數較高及防腐蝕性能較好的錫青銅材質,殼體內充滿22#抗磨液壓油,外殼上部裝配有滾動膜片式壓力補償器。制冷片冷面連接銅質吸熱冷板,銅質吸熱冷板與裝置耐壓殼體做共形設計,使整個制冷單元與裝置外殼貼合;制冷片熱面連接散熱翅片,通過液壓油、錫青銅殼體向外界海水散熱。為防止制冷片冷熱端通過液壓油導熱導致效率極低,制冷片中間充滿環氧樹脂,并配隔熱板或PN結外涂水基陶瓷材料做隔熱。深海生物保溫保壓裝置的耐壓殼體內外分布溫度傳感器,實時檢測內外海水溫度,當原位保溫保壓裝置開始存儲樣品時,監控系統的PLC通過采集溫度傳感器記錄的外界海水溫度作為溫控指標,通過控制不同并聯制冷單元的通斷來控制耐壓殼體內溫度。
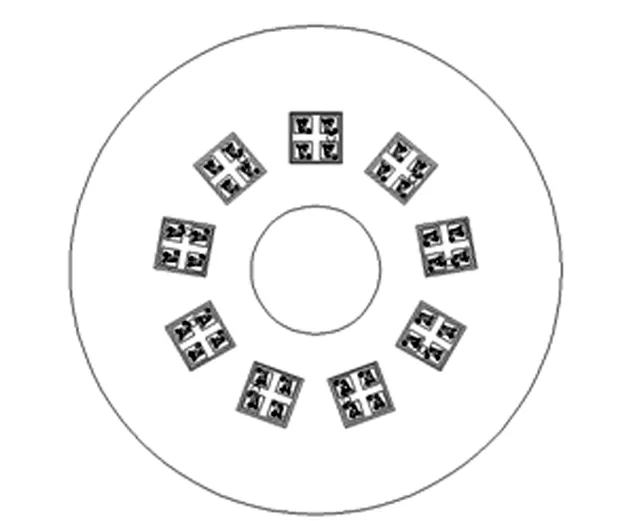
圖9 制冷單元布置圖(上半球)

圖10 制冷單元內部結構圖
3.4 保壓系統
保壓系統主要由補壓系統和卸壓系統組成。補壓系統主要用于裝置采樣后上浮過程中補償耐壓殼體內降低的壓力。主要是因為深海生物保溫保壓裝置采完樣并隨著潛水器上浮后,由于外界海水壓力逐漸降低,導致耐壓殼體向外擴張,導致內部壓力下降。補壓系統包括補壓罐、高壓氮氣瓶、充氣頭、放氣閥、活塞、電動調節閥等部件,如圖11所示。卸壓系統主要用于裝置采樣后繼續隨著潛水器下潛過程中卸掉耐壓殼體收縮導致的內部增大的壓力。卸壓系統主要由電磁溢流閥、儲水箱、手動放水閥等部件組成,如圖12所示。

圖11 補壓系統

圖12 卸壓系統
整個保壓系統工作流程如圖13所示。樣品放入耐壓殼體后艙口蓋隨即關閉和鎖緊,艙口蓋關閉和鎖緊時觸發接近開關動作,整個保壓系統開始進入工作狀態。補壓系統和卸壓系統根據內置于耐壓殼體內的壓力傳感器反饋的壓力數據而適時切換工作:當潛水器采完樣繼續下潛時,外界水壓增大壓迫耐壓殼收縮,耐壓殼體內壓力增大,超過采樣點壓力值,此時電磁溢流閥開啟,耐壓殼體內海水流入儲水箱直至耐壓殼體內海水壓力降至采樣點壓力值,這個過程即是卸壓系統的工作流程;當潛水器采完樣上浮時,外界水壓減小耐壓殼膨脹,耐壓殼體內壓力降低,低于采樣點壓力值,此時電動調節閥工作,放氣閥開啟,高壓氮氣將活塞右側的高壓海水壓入耐壓殼體內,直至耐壓殼體內的海水維持在采樣點海水壓力值,這個過程即是補壓系統的工作流程。
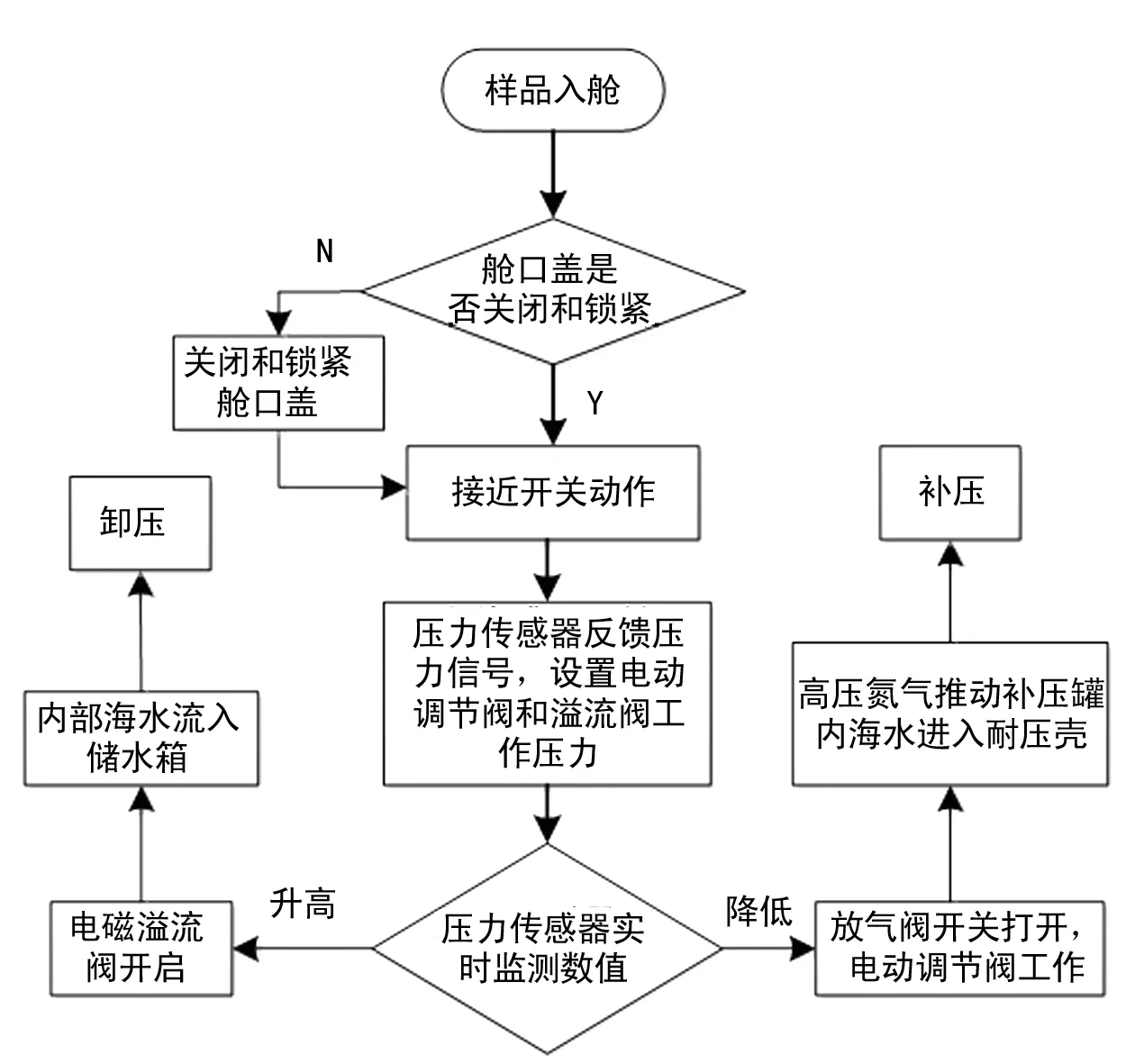
圖13 保壓系統工作流程圖
3.5 監控系統
根據深海生物原位保溫保壓裝置的功能需求,結合自身的設備狀態,監控系統主要包含兩部分:操控臺和驅動電子罐。操控臺放置于載人潛水器的載人艙內或者放置在ROV的工作母船上,主要包括電源變壓模塊、監控主機和操作面板;操控臺上設有所有執行機構的動作按鈕、參數顯示模塊以及液晶顯示屏,實現深海生物原位保溫保壓裝置的所有操作和狀態參數顯示;驅動電子罐與深海生物保溫保壓裝置集成在一起,隨著裝置一起下潛,驅動電子罐內集成工業交換機、控制器、罐載安全傳感器、視頻服務器等。驅動電子罐主要根據實時檢測的傳感器反饋參數,完成裝置的艙口蓋啟閉與鎖緊動作控制和保溫保壓過程中各閥的邏輯控制,監控系統架構如圖14所示。

圖14 監控系統結構圖
監控系統的控制邏輯如下:深海生物原位保溫保壓裝置搭載于潛水器上,在隨潛水器下潛過程中連接在耐壓殼體上的通海平衡閥保持開啟,保持內外壓平衡。至預定作業深度,監控系統根據外部壓力傳感器的反饋數值,控制艙口蓋鎖緊電動缸動作,解鎖艙口蓋,之后控制艙口蓋啟閉電動缸動作,開啟艙口蓋,ROV將采集的樣品從原位保溫保壓裝置的頂部放入耐壓殼體內,艙口蓋隨即關閉和鎖緊,通海平衡閥關閉。艙口蓋啟閉與鎖緊接近開關反饋該關閉狀態,并啟動溫控系統開始工作,將艙內樣品保持在原位溫度區間。上浮過程中,由于內外壓力差的不斷增大,艙內原位壓力開始降低,壓力傳感器實時監測艙內壓力數值,并控制保壓系統啟動工作,打開放氣閥,高壓氮氣推動高壓海水流入艙內完成補壓過程。下潛過程中,當壓力傳感器檢測到耐壓殼內壓力升高時,控制泄壓系統啟動工作,打開電磁溢流閥,耐壓殼體內部高壓海水流入儲水箱完成卸壓過程。
4 結 語
文中提出了一種深海生物的原位保溫保壓裝置的設計研究方案,可通過載人潛水器或纜控潛器搭載并下潛至預定深度,進行深海生物(包括微生物樣品、宏生物樣品)的取樣和存儲,并可對采集的各類樣品進行原位壓力和原位溫度的保持,從而保持了所采集樣品的原位物理、化學及生物學特性。根據該裝置的基本功能及工作模式,重點闡述了裝置各系統組成和特點,完成了主要部件的計算設計以及溫控系統、保壓系統和監控系統工作原理介紹。文中設計的深海生物原位保溫保壓裝置可應用于深海生物及深海海底礦物質的保真取樣,所研究內容對于提升深海生物原位研究以及深水作業能力拓展均具有重要的意義。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
工業設計(2022年8期)2022-09-09 07:43:20
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
軍事文摘(2020年20期)2020-11-28 11:42:50
航空世界(2020年10期)2020-01-19 14:36:20
裝備制造技術(2019年12期)2019-12-25 03:06:46