高速重載車輛主動油氣懸架系統平順性控制發展綜述
2022-05-19 13:04:18郭勇張子健
科學技術與工程 2022年12期
關鍵詞:系統
郭勇, 張子健
(1.中南大學高性能復雜制造國家重點實驗室, 長沙 410083; 2.山河智能股份裝備有限公司, 長沙 410100)
車輛在不平路面行駛時,由于路面起伏變化會使車身產生一定的振動,當振動過大時可能會導致車輛的零部件磨損嚴重,車身轉向時發生側翻以及嚴重車輛的行駛平順性等問題。
平順性是指車輛在一般行駛速度范圍內行駛時,能保證乘員不會因車身振動而引起不舒服和疲勞的感覺,以及保持所運貨物完整無損的性能[1]。一般平順性的評價指標主要包括:車身加速度、車輛動載荷和懸架動撓度。對于具有高速重載底盤的工程車輛來說,這類車輛行駛的路面復雜多變,且載重量大,重心位置較高,行駛時的平順性會很差,這極大地限制了高速重載車輛的運輸效率,也嚴重影響了駕駛員的乘適性。懸架系統改善車輛行駛平順性的重要部件,其性能直接影響車輛的行駛平順性和操縱性能。油氣懸架尤其適用于載重量超過35 t的重型車輛,雖然采用油氣懸架后能夠有效地改善重型車輛行駛的平順性,但傳統的被動油氣懸架系統無法根據車輛的狀態和路面情況實時調節懸架參數,無法始終保持良好的平順性。為了使車輛適應不同的路面狀況,就需要將主動油氣懸架系統應用于高速重載車輛底盤上,以此來實時對車輛的懸架系統性能進行調節。主動油氣懸架系統是在被動油氣懸架的基礎上增設了一個可控作用力的裝置,該裝置通常包括能源系統、傳感系統、中央控制系統以及執行機構。主動油氣懸架系統可以根據車輛的運動狀態以及路況信息,動態調整油氣懸架的系統性能,使車輛在不同狀態及路況下行駛都能很好地緩和地面的沖擊。
基于此,主要針對高速重載底盤車輛的主動油氣懸架系統平順性控制研究進行綜述,對主動油氣懸架系統的性能特點以及中外研究現狀與進展進行總結與回顧,并對主動油氣懸架未來可能的發展趨勢進行闡述。
1 主動油氣懸架系統工作原理及特點
1.1 主動油氣懸架工作原理
車輛在不平路面下行駛時,由于路面激勵引起車輛的振動,油氣彈簧的活塞作上下往復運動,液壓油流經節流孔來產生節流阻尼力,節流阻尼力的大小取決于節流孔的節流面積,通過對節流孔的孔徑大小進行改變可以實現對懸架阻尼的無級調節,同時氣室中的惰性氣體壓力也隨著運動位移而變化產生彈力,此時主要依靠節流阻尼力和氣室彈力來衰減車身的振動。油氣懸架系統的剛度大小取決于蓄能器的性能參數,而懸架阻尼大小取決于節流孔大小、單向閥結構等因素[2]。
高速重載底盤車輛的主動油氣懸架系統中包含的元件主要包括蓄能器、阻尼閥、液壓缸、電磁閥、傳感器和中央控制單元。主動油氣懸架按照是否包含外部動力源可以分為全主動油氣懸架和半主動油氣懸架兩大類。全主動油氣懸架需要外加動力元件如液壓泵,實現將油液從油箱流經電磁閥壓入液壓缸,實現油氣懸架輸出力的調節。半主動油氣懸架無需主動輸入能量,只需根據車輛的行駛工況要求調節油氣懸架的阻尼和剛度來改變懸架的特性。
圖1[3]為阻尼可調的半主動油氣懸架系統原理圖,中央控制單元(electronic control unit,ECU)采集傳感器的位移、速度以及加速度信息進行處理,來調節節流閥閥口的大小,進而調節節流阻尼力。
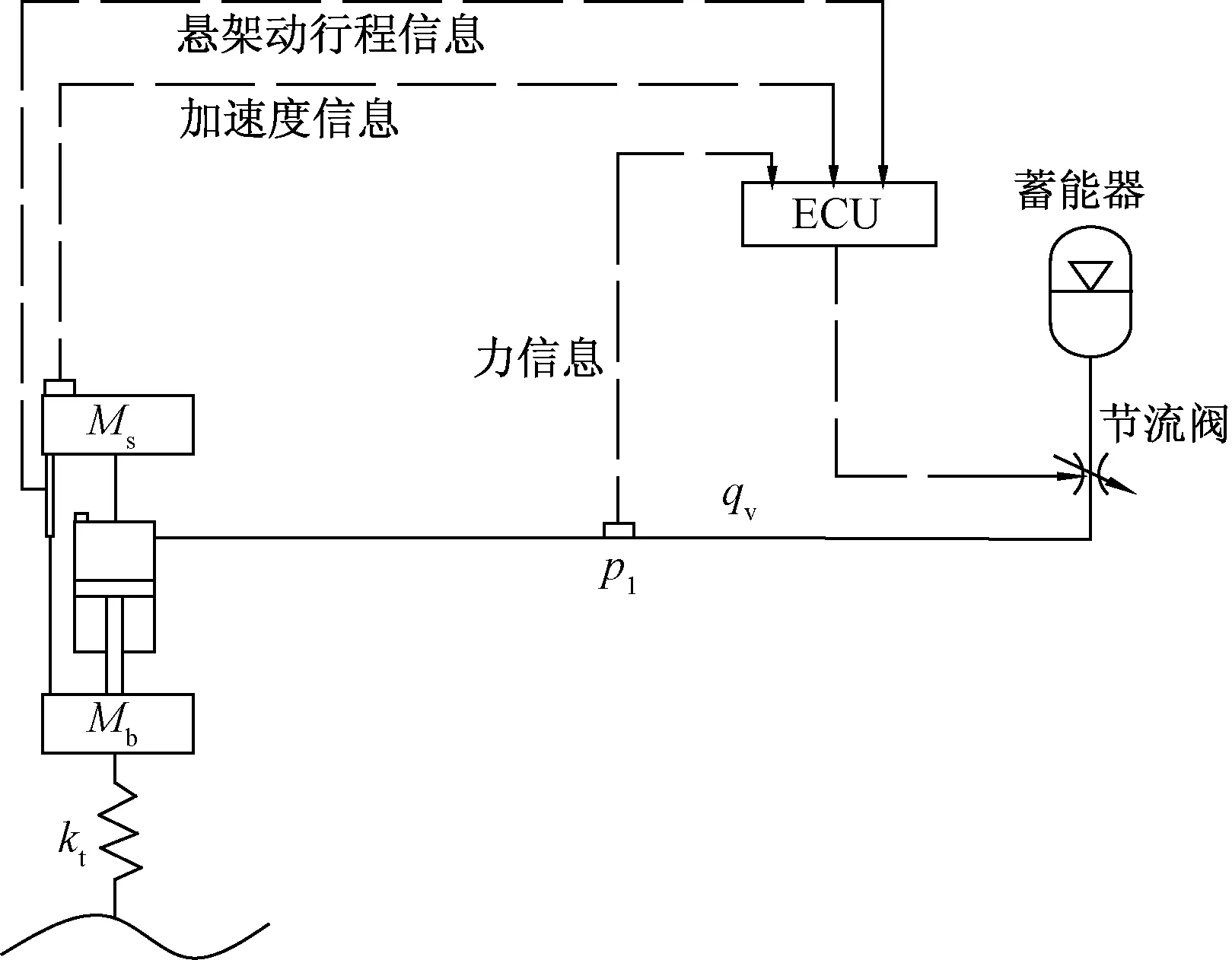
kt為輪胎剛度;Mb為簧下質量;Ms為簧上質量;p1為油路中的油壓;qv為進入液壓缸的流量圖1 阻尼可調的半主動油氣懸架系統[3]Fig.1 Adjustable damping semi-active hydro-pneumatic suspension system[3]
圖2[4]為剛度可調的半主動油氣懸架系統原理圖,這種結構的半主動油氣懸架采用了主副兩個蓄能器,中央控制單元ECU采集各類傳感器信息進行處理來控制開關閥的開啟和關閉,實現將副蓄能器接入系統或切斷,從而實現油氣懸架的剛度可調,來改變氣室彈性力。
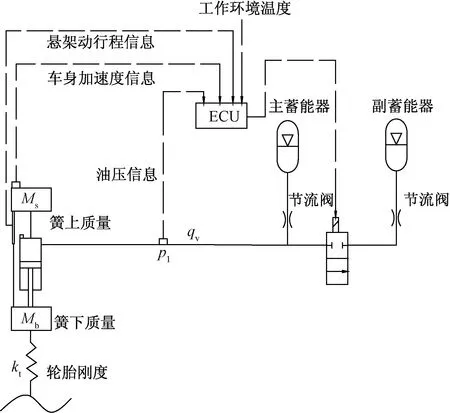
圖2 剛度可調的半主動油氣懸架系統圖[4]Fig.2 Semi-active hydro-pneumatic suspension system with adjustable stiffness[4]
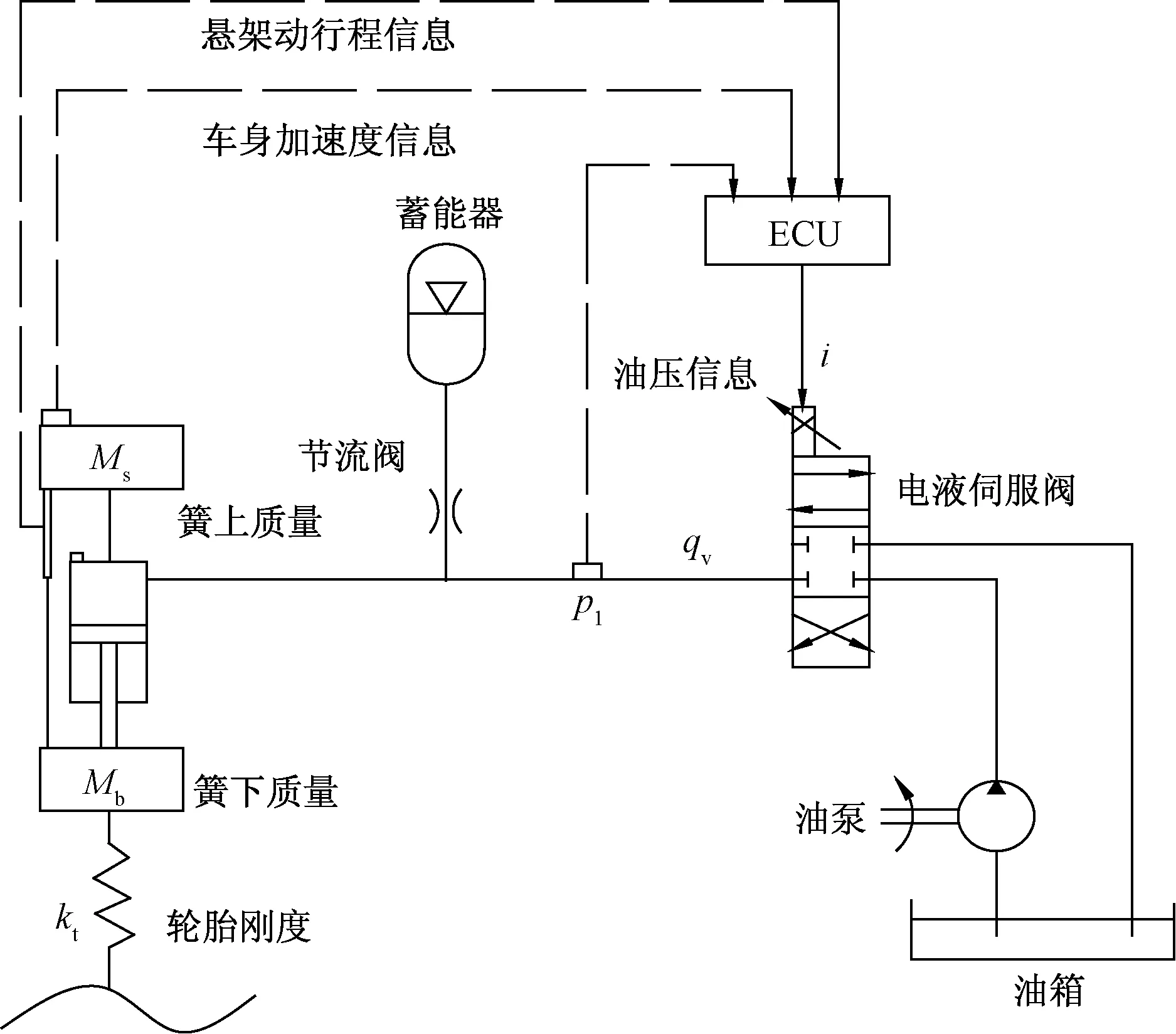
i為電流圖3 全主動油氣懸架系統[5]Fig.3 Fully active hydro-pneumatic suspension system[5]
圖3[5]為全主動油氣懸架系統模型圖,主動油氣懸架系統在被動油氣懸架系統的基礎上增加了電液伺服閥、油泵以及外部液壓源。當車輛行駛在不同路況下時,通過在車輛上安裝的傳感器將車輛的車身加速度、懸架動行程、液壓油壓力等信號反饋給中央控制單元,通過計算實際的狀態偏離目標狀態的偏差值來調節電磁伺服閥的開度,將液壓油壓入液壓缸,進而調節液壓缸的油液壓力,使油氣懸架的性能在不同路況下都能保持一個相對最優的狀態。
1.2 主動油氣懸架特點
主動油氣懸架在維持被動油氣懸架已有特點的基礎上,對車輛行駛時的性能具有更進一步的改善,其特點如下。
(1)主動油氣懸架系統優點:①具有車身姿態調節功能。當車輛進行加減速和急轉向時,對車身的姿態進行控制,主要包括車輛的側傾控制和俯仰控制;②具有懸架參數實時控制功能。主動油氣懸架系統能夠根據車速變化以及路面變化實時改變懸架的剛度和阻尼,提高車輛的適應性和行駛性能;③車身高度控制功能。通過傳感器實時檢測車速與路面信息,在高、中、低速下進行車速高度的模式切換,使車輛維持穩定行駛狀態;④車身自動調平功能。由于負載增加而使車身高度降低,此時通過主動控制液壓油從油箱泵入高壓蓄能器,由此來調節液壓缸的高度,進而調平車身,使其恢復到初始高度。
(2)主動油氣懸架系統缺點:①主動油氣懸架系統結構和控制復雜,對于硬件的要求較高、成本大;②主動油氣懸架系統需要單獨的動力源,能耗很大。
2 主動油氣懸架系統平順性控制發展現狀
中外學者對于主動油氣懸架系統的研究主要集中在:一是對主動油氣懸架的結構進行優化和創新;二是對主動油氣懸架控制策略的研究,尋求更優的算法來對油氣懸架進行控制。
主動油氣懸架系統對高速重載車輛的平順性進行改善主要是通過對油氣懸架的剛度與阻尼進行實時調節,或直接控制液壓缸的油液壓力來降低車身的振動。根據主動油氣懸架系統進行平順性控制的控制方式將其分為三類:剛度可調的半主動油氣懸架系統,阻尼可調的半主動油氣懸架系統和全主動油氣懸架系統。
2.1 剛度可控的半主動油氣懸架系統
油氣懸架系統實現剛度控制主要依靠兩種方式,一是使用儲氣式彈性元件,通過切換不同儲氣壓力的氣室來調節油氣懸架的剛度。二是通過安裝多個充氣壓力不同的蓄能器,通過接通和斷開不同數量的蓄能器來實現懸架剛度的分級調節。
Hrovat[6]于1976年首次提出可以通過改變彈簧剛度的半主動懸架系統來達到減振的目的。對于實現油氣懸架的剛度控制,主要是利用雙氣室或者多氣室實現,利用氣室容積的變化改變懸架剛度。1993—2000年,法國雪鐵龍公司研制出的第二代、第三代主動油氣懸架可以通過接通或切斷中間蓄能器來控制懸架系統的剛度,進而提高車輛的平順性。Deo等[7]基于空氣懸架提出通過開關閥的通斷來控制接入空氣懸架的輔助氣囊數量,以此來改變空氣彈簧的有效容積,從而改變懸架的剛度。
為了解決油氣彈簧的剛度無法調節的問題,吳志成等[8]設計了一種可控剛度的油氣彈簧裝置,其系統原理簡圖如圖4[8]所示,該裝置通過中央控制單元ECU控制開關閥的開關來實現副儲氣室與工作油缸間的通斷,以此來改變儲氣室的總體積,進而改變油氣彈簧的剛度。王剛等[9]提出了一種雙油室剛度可調節的油氣彈簧,該裝置可根據車輛的載重情況調節油嘴注入或排出油液的體積,來調節油氣彈簧的剛度。劉金強等[10]對懸掛缸傾斜安裝的連通式油氣懸架的剛度特性進行了研究,通過改變懸掛缸的安裝角度來研究油氣懸架的剛度特性變化,經過仿真和實驗結果表明,隨著懸掛缸傾斜角的增大,連通式油氣懸架的側傾剛度會降低,而垂向剛度會增加。
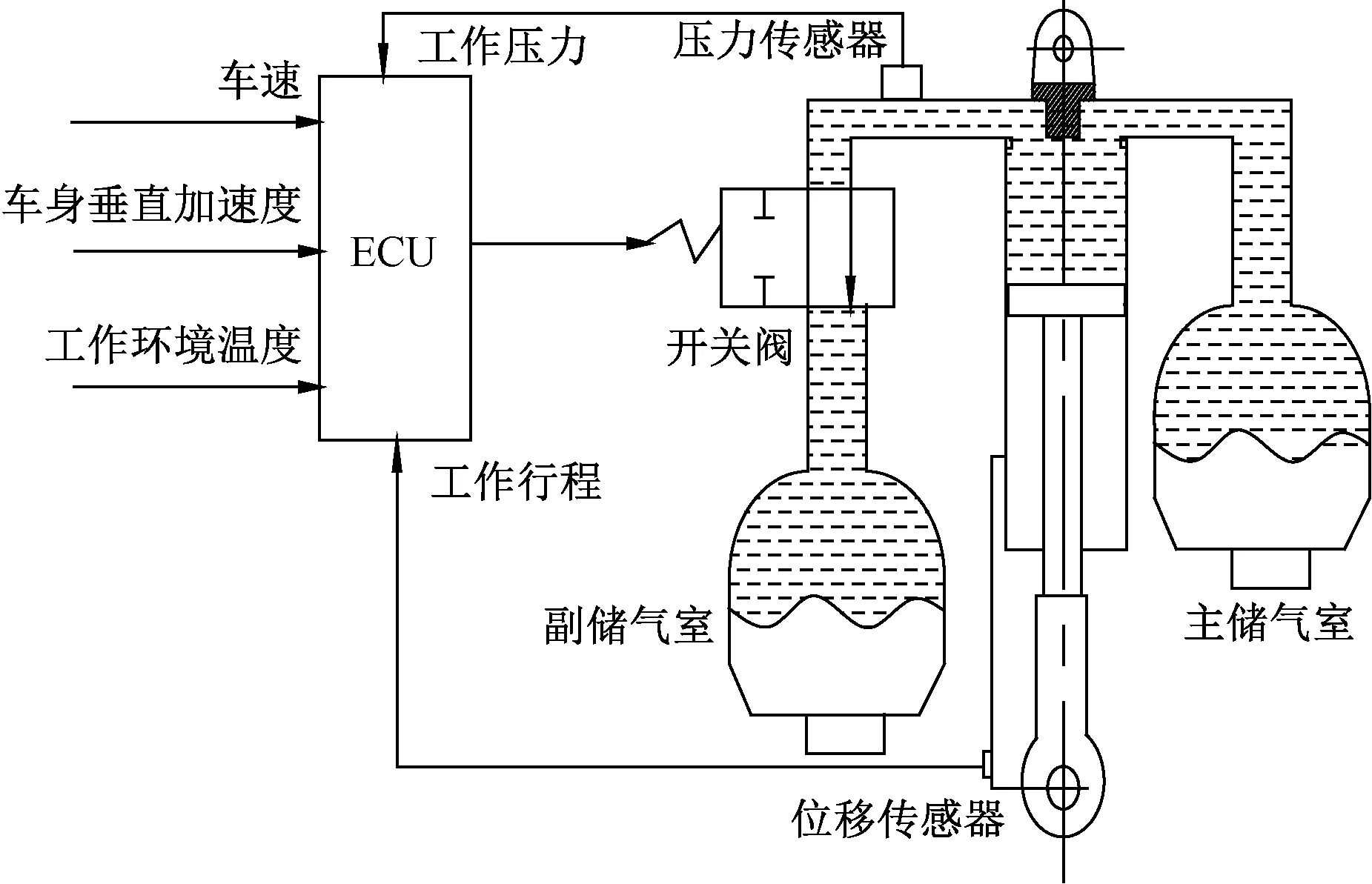
圖4 可控剛度油氣彈簧原理簡圖[8] Fig.4 Fully active hydro-pneumatic suspension system[8]
2.2 阻尼可控的半主動油氣懸架系統
阻尼可控的半主動油氣懸架系統主要是根據車輛狀態實時調節阻尼閥的閥口通流面積來控制阻尼力大小,以此來提高車輛的平順性。由于實現剛度控制需要的系統結構相對復雜,而且剛度調節需要消耗大量的能量,比實現阻尼可控更加困難,成本更高,故目前大部分研究集中于對阻尼的控制,阻尼控制技術的應用也相對更加成熟。根據調節節流口面積的方式不同,可以將油氣懸架阻尼控制的方法分為以下幾類:
2.2.1 機械式阻尼調節
機械式阻尼控制不依賴于任何傳感器或電子控制單元,完全依靠系統自身狀態,通過巧妙地設計機械結構,達到阻尼按照期望規律變化的目的[11]。
2000年,德國的ZF薩克斯公司研究出一種氣調可變阻尼系統,該系統將空氣懸架的氣囊中的壓力作為控制信號,通過機械裝置控制阻尼閥來實現無級調控阻尼力,該系統無需依靠電子控制元件即可實現懸架的阻尼隨氣壓的變化而變化。由于阻尼閥內置會出現嚴重的散熱問題,因此阻尼閥一般都是采用外置安裝方式,以改善散熱的情況。陳思忠等[12]發明了一種油氣懸架外置機械感應式可調阻尼閥,該可調阻尼閥通過油氣懸架油缸的壓縮和伸張使油液推動浮動閥閥體滑動來調節阻尼力,該機械式可調阻尼閥無需使用任何電子控制元件即可根據路況實時調節阻尼,且成本低,可靠性高。趙景波等[13]提出了一種車身高度可調與阻尼可調的集成控制主動懸架系統,利用阻尼分級可調的減振器來實現阻尼模式切換,解決了阻尼可調范圍有限的問題。
機械式阻尼控制方式的成本最低,可靠性高,能夠滿足多種路況和車況下車輛對懸架性能的要求,但是受到機械結構的限制,不能滿足所有工況下的懸架性能要求,具有一定的局限性。
2.2.2 電子控制阻尼調節
電子控制實現阻尼調節主要是通過中央控制單元接收傳感器采集的路面信息和車身信息,經過計算得出理想阻尼值后通過驅動執行機構來改變阻尼孔的節流閥的閥口面積。楊杰等[14]研究出一種外置電磁閥式三級阻尼可調油氣懸架,該裝置可以通過電磁閥的通電和斷電來改變油液的總節流面積,或者控制開閥壓力來調節阻尼力。王勛[15]設計了一種電控旋轉滑閥,該閥能夠通過調節節流面積來對懸架的阻尼等級進行調節。為了解決礦車在不同路面下行駛時的振動問題,王建明等[16]發明了一種礦車的油氣懸架阻尼控制方法。該方法事先建立了模擬工況下的阻尼孔徑值數據庫,在實際工況下,通過中央處理器處理傳感器檢測到的實際路面情況,與數據庫進行比對后,選擇并切換成對應的阻尼孔徑,以此來適應礦車行駛的不同路面,提高礦車的行駛平順性。陳龍等[17]提出了一種基于阻尼多模式切換減振器的方法來實現半主動懸架的阻尼控制,該方法通過控制兩個電磁閥的開關可以實現4種阻尼工作模式的切換。圖5為該型減振器的結構原理圖[17]。
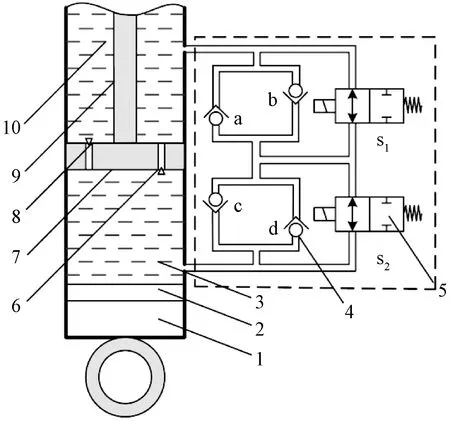
1為氣室;2為浮動活塞;3為壓縮腔;4為液壓閥;5為開關電磁閥;6為復原閥;7為活塞;8為壓縮閥;9為活塞桿;10為復原腔;a、b、c、d為4個單向止回閥;s1、s2為兩個開關電磁閥圖5 多模式減振器結構原理圖[17]Fig.5 Multi-mode shock absorber structure schematic diagram [17]
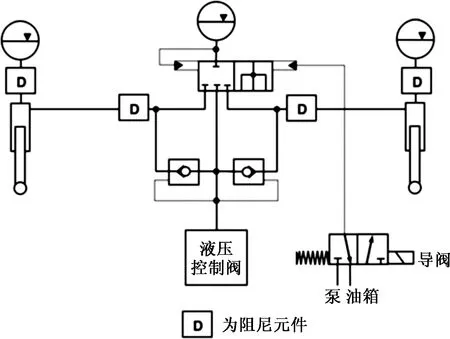
圖6 雪鐵龍公司第一代主動油氣懸架系統原理圖[18]Fig.6 Schematic diagram of Citroen’s first generation active hydro-pneumatic suspension system[18]
2.3 主動油氣懸架系統
雪鐵龍公司是最早開始對油氣懸架進行主動控制進行研究的。1989年,雪鐵龍公司研制出了第一代主動油氣懸架系統,系統原理圖如圖6[18]所示,該系統相比于被動油氣懸架,在其左右兩側的油氣彈簧之間增設了一個懸架控制模塊,同時在前后懸架的液壓油路增加了一個電磁閥,通過控制電磁閥的開關狀態來實現油液與油氣缸的連通與切斷,由此改變懸架的“軟”“硬”狀態。
1989年,豐田Ceilica車型上裝置了真正意義上的主動油氣懸架系統[19]。在高速重載車輛的主動油氣懸架系統平順性控制方面,研究對象主要包括重型礦用車輛以及一些軍用型高速越野車輛。如美國Hummer“蜂鳥”輪式車輛、英國“蝎式”輕型坦克上均安裝了主動油氣懸架系統,經過實地實驗表明,在崎嶇地形路面上行駛的高速重載車輛能夠承受來自地面的強烈沖擊,極大提升了車輛的行駛平順性。
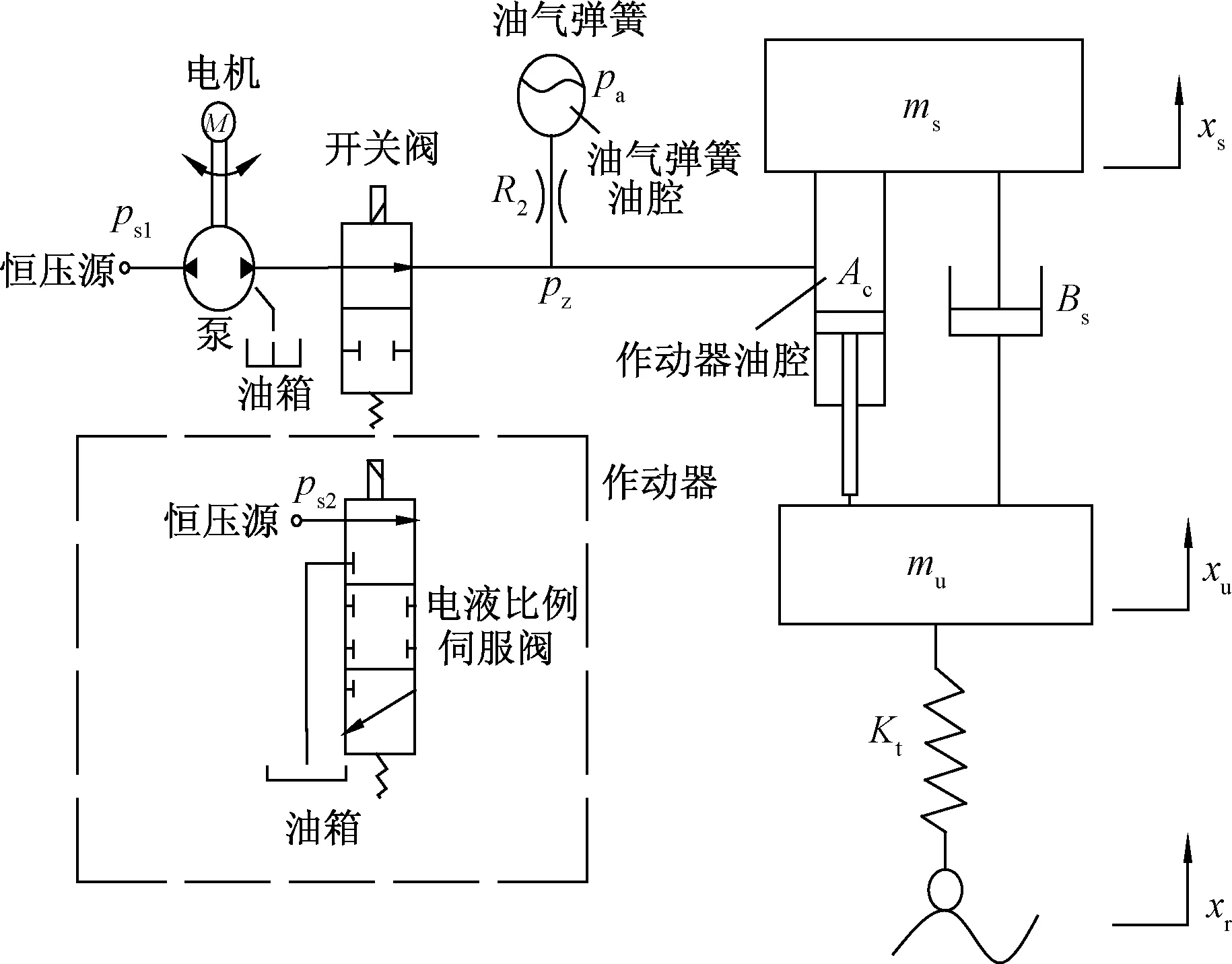
mu為非懸掛質量;ms為懸掛質量;xr為路面輸入的位移;xu為非懸掛質量的位移;xs為懸掛質量的位移;Bs為阻尼系數;Kt為輪胎剛度;Ac為無桿腔有效面積;pa為油氣彈簧氣室壓力;R2為油液的液阻;ps1和ps2為恒壓源壓力;pz為油腔壓力圖7 泵驅動的主動油氣懸架系統原理圖[22]Fig.7 Schematic diagram of pump-driven active hydro-pneumatic suspension system[22]
對于油氣懸架的主動控制策略進行應用與優化也是改善車輛平順性的熱點。 El-Demerdash[20]對油氣懸架的線性最優控制策略進行研究,設計出一種有限帶寬主動油氣懸架控制器,能夠有效降低車身的振動加速度,但是建立的模型中沒有考慮油氣懸架的非線性特性,具有一定的局限性。為了改善重型車輛在不同路面下行駛時的平順性以及適應路面的能力,樂文超等[21]對某重型車輛的油氣懸架控制方法進行研究,采用模糊比例積分微分(proportion integration differentiation,PID)控制算法對主動油氣懸架系統中的電液伺服閥進行控制,通過控制閥口的開度來調節懸架輸出力的大小,仿真結果表明,基于Fuzzy-PID控制的主動油氣懸架使得車輛的加速度均方根值下降了約19%。由于主動油氣懸架系統獲取車身以及路面的信息需要依靠傳感器,有些車身參數可能無法直接從傳感器上獲得,并且精度和可靠性受傳感器的影響。對此,霍東東[22]對泵驅動的主動油氣懸架系統進行了研究,主動油氣懸架系統原理圖如圖7[22]所示,從系統的動力學建模、主動控制算法以及狀態觀測算法3個方面對其進行研究,基于狀態觀測器的主動油氣懸架系統取消了對傳感器的依賴,并進一步提高了主動油氣懸架系統對路面的適應能力,提高了系統的穩定性。
除了對油氣懸架的剛度和阻尼進行主動調節來提高車輛的平順性,還可以通過調平車身在行駛過程中的姿態以及調節車身的高度來間接改善平順性。Serrier等[23]對裝備油氣懸架的車輛進行主動側傾控制裝置研究,該裝置基于層次控制策略,使用了一個監督器、一個前饋回路和一個反饋回路,且采用非整數階魯棒控制器(commande robusted’order non entire,CRONE)來合成魯棒控制器,由于該裝置取消了防傾桿,在有效抑制車輛側傾的同時也提高了車輛行駛時的平順性。柯歡歡[24]針對大型重載車輛的主動油氣懸架姿態控制進行研究,采用結合PID控制和滑模控制算法的雙閉環控制策略對車身的姿態進行調節,實現了對車身高度和姿態快速、平穩的調節,有效降低了車輛在轉向時的側傾角度,也進一步提高了車輛行駛的平順性。劉爽等[25]對主動油氣懸架系統的電液伺服系統進行了研究,并提出了一種自適應滑模控制來對懸架系統的剛度進行自適應調節。
相比于半主動油氣懸架系統,全主動油氣懸架系統對路面的適應能力更強,平順性改善能力也更好,但是其實現需要加入外部動力元件,耗能大,成本更高,系統的結構更加復雜。被動油氣懸架、半主動阻尼可控油氣懸架、半主動剛度可控油氣懸架、主動油氣懸架的性能對比如表1所示。
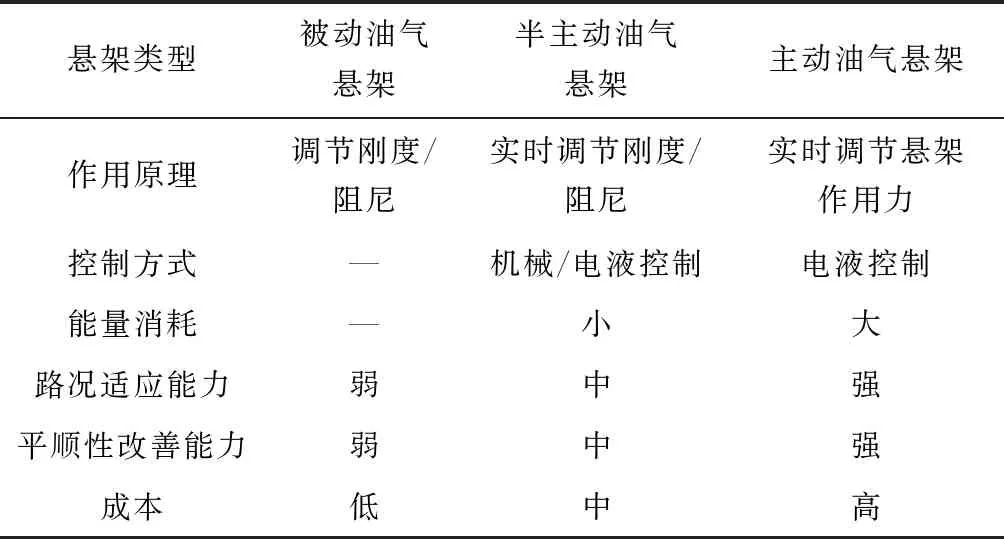
表1 油氣懸架性能對比Table 1 Performance comparison of hydro-pneumatic suspension
3 油氣懸架主動控制策略
主動油氣懸架系統控制性能的好壞很大程度上取決于控制器的控制效果,不同控制策略會對油氣懸架的性能有不同程度的改善。目前,對于油氣懸架系統的主動控制策略理論較多,其中應用廣泛的幾種控制策略主要包括天棚控制[26],模糊控制[27-29]、線性最優控制[30-32]、PID控制[33-34]、預瞄控制[35-36]及神經網絡控制[37]等。
Karnopp等[38]于1974年首次提出了天棚控制策略。天棚阻尼控制是一種基于懸架速度的負反饋最優控制方法,具有控制結構簡單、能耗低、阻尼切換速度快等特點,并且具有一定的魯棒性。Dugard等[39]提出了一種改進的線性天棚控制策略,該方法能夠基于車身的振動速度對阻尼進行線性調節。雖然天棚控制算法能夠有效地提高車輛的平順性,抑制車身的側傾和俯仰運動,但也存在一定的缺點。天棚控制算法只是對簧載質量作用阻尼力,而非簧載質量則不提供阻尼力,因此天棚控制會增大動載荷[40]。針對此缺點,Shik等[41]和Mehdi等[42]對天棚控制算法進行了改進。張磊等[43]設計了一種阻尼可調的天棚阻尼控制器,該控制器能夠有效抑制車體的垂向速度,進而間接的抑制垂向加速度,提高平順性。周創輝等[44]提出了一種改進型天棚阻尼控制算法來對饋能式半主動懸架進行控制,計算結果表明,該改進型天棚阻尼算法相比于傳統型天棚阻尼算法改善效果更明顯,且有效地提升了懸架的饋能功率。王小龍等[45]提出了一種天棚阻尼控制方法,該方法基于阻尼力進行閉環控制,通過獲取車身振動速度得到期望阻尼力。
模糊控制是一種基于規則的并且可以用模糊語言來表達的算法,可以允許被控對象沒有精確的數學模型,具有很強的魯棒性[46]。模糊控制適用于模型復雜或難以精確描述的系統,適合對非線性懸架系統進行控制,且控制精度較高。由于油氣懸架的結構較為復雜且具有非線性特性,故模糊控制策略也很適用于油氣懸架。很多的研究學者對于油氣懸架的模糊控制研究都選擇車輛的振動加速度作為控制目標,但是由于加速度的論域變化范圍大,模糊控制中選取的一組量化因子只能得到針對某種特定路面情況或車速情況較好的控制效果,當路況或車身發生變化時,控制效果會變差,因此量化因子不能固定的選取為一組。Zhang等[47]采用模糊控制來解決車輛的懸架系統中存在的不確定性問題,使得車輛在保持系統穩定性的同時還能提高車輛的行駛平順性,圖8[47]為一種基于模糊控制的車輛1/4懸架系統模型。
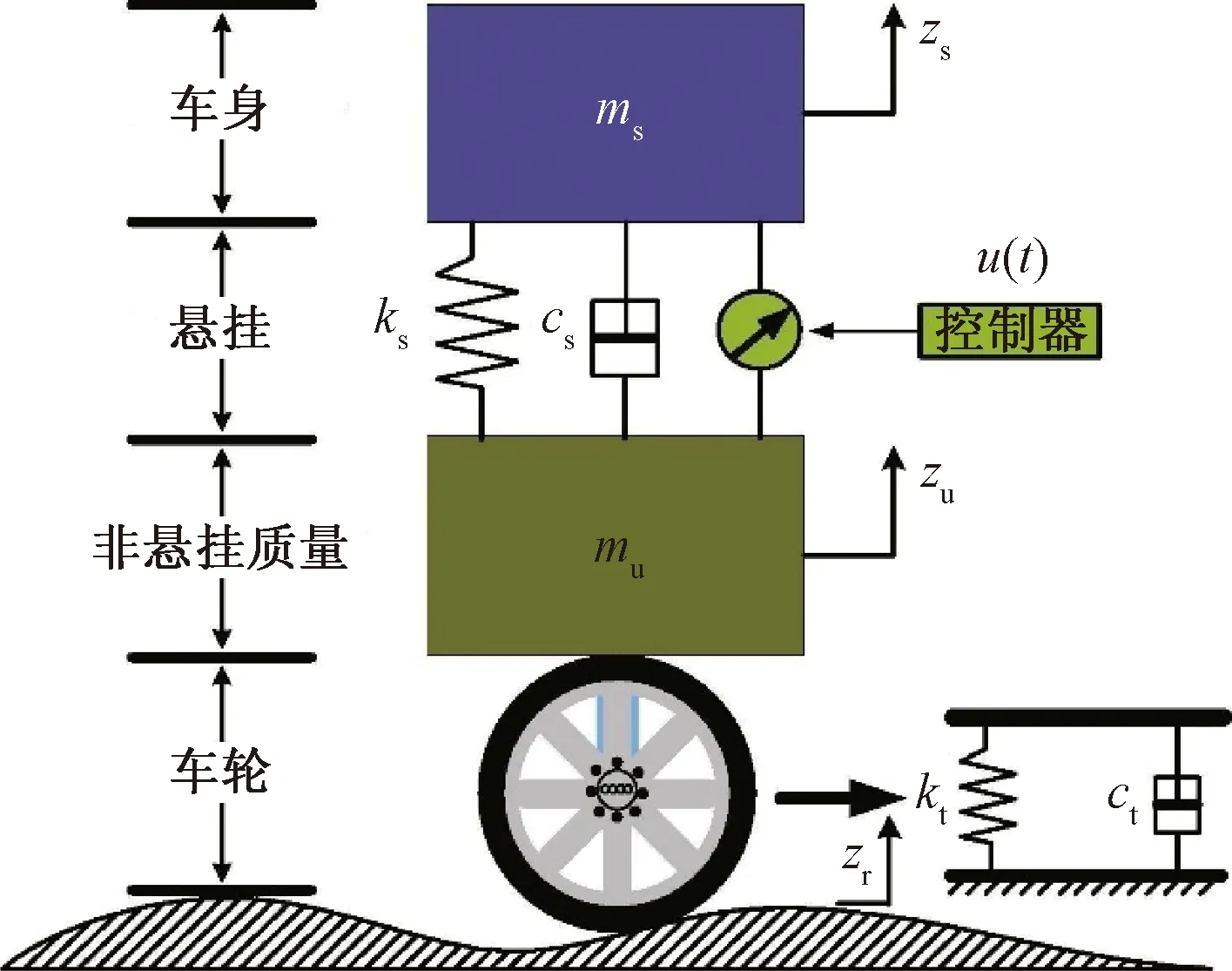
zr為路面輸入位移;zu為非懸掛質量的位移;zs為懸掛質量的位移;ks為懸掛剛度;cs為懸掛阻尼;kt為輪胎剛度;ct為輪胎阻尼;u控制力;t為時間圖8 一種基于模糊控制的車輛1/4懸架系統[47]Fig.8 A vehicle 1/4 suspension system based on fuzzy control[47]
姚行艷[48]基于自適應模糊控制設計了一種半主動懸架容錯控制器,該控制器能夠對車輛運行中出現的懸架阻尼器增益故障進行診斷,能夠更好地改善車輛的行駛平順性。劉曉昂等[49]將模糊控制與PID控制結合來進行半主動懸架控制,解決了單一PID控制參數固定的問題,并且對于車輛的穩定性改善效果明顯提升。
線性最優控制是建立在系統較為理想的模型基礎上,采用受控對象的狀態響應與控制輸入的加權二次型作為性能指標,同時保證受控結構動態穩定性條件下實現最優控制[50]。線性最優控制可以同時考慮多個變量對系統的影響,因此適用于需要對懸架進行多目標控制的情況。鄭帥等[51]、朱龍英等[52]均對具有非線性特性的半主動油氣懸架進行線性化建模處理,利用線性最優控制算法改善了車輛的平順性和操縱性。由于油氣懸架具有非線性、時變性等特點,所以實際的系統會偏離理論模型,此時線性最優控制難以達到預期的控制效果。黃興惠等[53]為了研究存在系統模型誤差以及不確定擾動下系統的穩定性,對利用線性最優控的懸架系統進行魯棒性分析,并提出使用回路傳輸方法可以恢復線性二次調節器(linear quadratic regulator,LQR)控制算法的魯棒穩定性。趙強等[54]為了解決懸架系統的實際狀態難以測量的問題,基于最優控制方法建立了全維觀測器以及狀態反饋系統,該方法能夠有效測量狀態量,使得懸架模型更加準確穩定。黃英博等[55]提出了一種基于參數估計誤差信息的自適應最優控制方法,并且引入了神經網絡對最優性能指標進行調節,仿真結果表明,該方法能夠有效提升懸架系統的綜合性能。
PID控制具有控制結構簡單,實時性好,易于實現的特點,在工程領域被廣泛應用[56]。PID控制的優點在于控制精度較高,而且魯棒性好,但是缺點在于自適應調節能力差,對于復雜的非線性系統的控制能力弱。毛強[57]將車身垂直加速度的誤差值作為控制器的輸入,設計了負反饋PID控制模型,仿真結果表明PID控制對車身的加速度具有明顯的抑制作用。但是由于系統運行時,PID控制的調節參數無法修改,導致車輛系統在外界干擾或自身運動狀態發生改變的情況下,控制效果會變差,因此應用于油氣懸架的主動控制時,會將PID控制和其他的智能算法相結合來使用,如神經網絡、線性控制等控制算法相結合,以此來提高PID控制的控制效果。李小偉等[58]為了解決重型底盤車輛在受到垂向干擾后難以快速恢復車身平穩狀態以及車身姿態穩定的問題,將反饋線性化控制理論與PID控制結合,極大提高了重型底盤車輛在特殊工況下的穩定行駛性能。朱玉剛等[59]將單一PID控制和Fuzzy-PID控制進行對比仿真,仿真結果表明,單一PID控制和Fuzzy-PID控制均對懸架性能有明顯改善,且相比于單一PID控制,Fuzzy-PID控制的自適應能力更好,更加適合于非線性、多時變的被控系統。
預瞄控制能夠根據車輛當前的行駛狀態和前方路面干擾等因素來提前調節被控懸架[60]。預瞄控制可以分為軸間預瞄和軸前預瞄。其中軸間預瞄控制的原理主要是將前輪懸架受到的激勵作為輸入,來預瞄后輪懸架。軸間預瞄的原理是依靠雙目相機或者其他傳感器來預先獲取前方道路信息,將道路信息作為輸入量,來預瞄前后懸架。由于軸前預瞄是依靠前輪懸架被動受到的激勵來調節后輪懸架,因此該方法適用于低速車況下。而軸前預瞄的控制效果主要依賴于傳感器獲取路面信息的精度以及實時計算能力,因此應用范圍更為廣泛。陳兵等[61]對軍用車輛的懸架預瞄控制技術的現狀和發展趨勢進行了研究,并提出實現懸架預瞄控制的關鍵技術包括傳感器技術,路面辨識算法以及高性能的微處理器,圖9[61]為一種前軸預瞄控制懸掛系統原理圖。
很多研究學者針對主動懸架預瞄控制開展了研究[62-63]。但是僅考慮車輛的前后輪時間上的滯后,尚未考慮控制器的控制時滯,因此會影響控制系統的穩定性。宋剛等[64]對車輛主動懸架的隨機預瞄控制進行研究,并考慮了控制器的控制時滯問題。王剛[65]提出了一種基于視覺預瞄的方法對半主動懸架的阻尼力進行控制,將采集到的圖像數據與加速度傳感器采集的數據進行融合后輸入到控制器中,控制效果優于自適應阻尼控制策略,減小了懸架控制器的時滯效應。秦東晨等[66]采用機器視覺處理的方法提出了一種完全預瞄懸架控制系統,基于OpenCV檢測典型路面,對路面進行識別、跟蹤及測距,再結合車輛狀態信息進行懸架控制。實驗結果表明,使用該懸架預瞄控制系統能使車輛在不同車速下的懸架性能均有所提升,且車速越高改善效果越好,同時解決了懸架系統的控制時延問題。
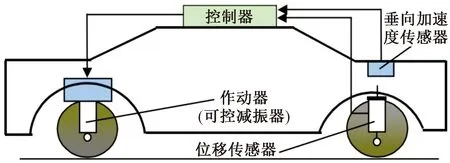
圖9 前軸的預瞄控制懸掛系統原理圖[61]Fig.9 Schematic diagram of front axle preview control suspension system[61]
神經網絡具有自學習、自適應的能力,能夠逼近任意非線性函數。神經網絡控制是解決非線性、不確定系統問題的一條新思路[67-68]。神經網絡的自學習能力和自適應能力強的特點使得它能夠適用于多種工況下的懸架控制,但缺點在于神經網絡控制的收斂速度較慢。Moran等[69]將神經網絡應用于辨識非線性車輛的動態特性,通過訓練神經網絡來識別前方的干擾路面,改善懸架響應性能。Sharp等[70]將神經網絡控制算法用于主動懸架中,通過建立神經網絡結構,不斷的實驗和修改參數來使主動懸架系統的性能達到最優。由于神經網絡具有很強的自適應性,因此經常會和其他算法相結合使用來改進其他算法的缺點。孫齊超[71]為了保證起重機在不同路面情況下的平順性能都較好,使用RBF神經網絡對PID參數進行在線調整,使PID控制具有自主調節能力。Zhang等[72]提出了一種基于神經網絡的動態曲面控制策略來控制懸架,該方法利用神經網絡的基函數性質對懸架系統中的未知函數進行逼近,采用動態曲面控制降低了控制器的復雜度,仿真結果表明,該控制策略具有優越的控制效果。李雅琦等[73]、申愛民等[74]將徑向基函數神經網絡控制應用到車輛懸架控制中,利用徑向基函數神經網絡強大的逼近能力和自學習能力來調節懸架控制系統,進而保證懸架系統的穩定性和收斂性。除了上述的常用主動油氣懸架控制策略,車輛的主動油氣懸架系統還有一些其他的控制策略,如自適應控制[75-76]、滑模控制[77-78]以及魯棒控制[79-80]等。油氣懸架的主動控制策略特點對比情況如表2所示。
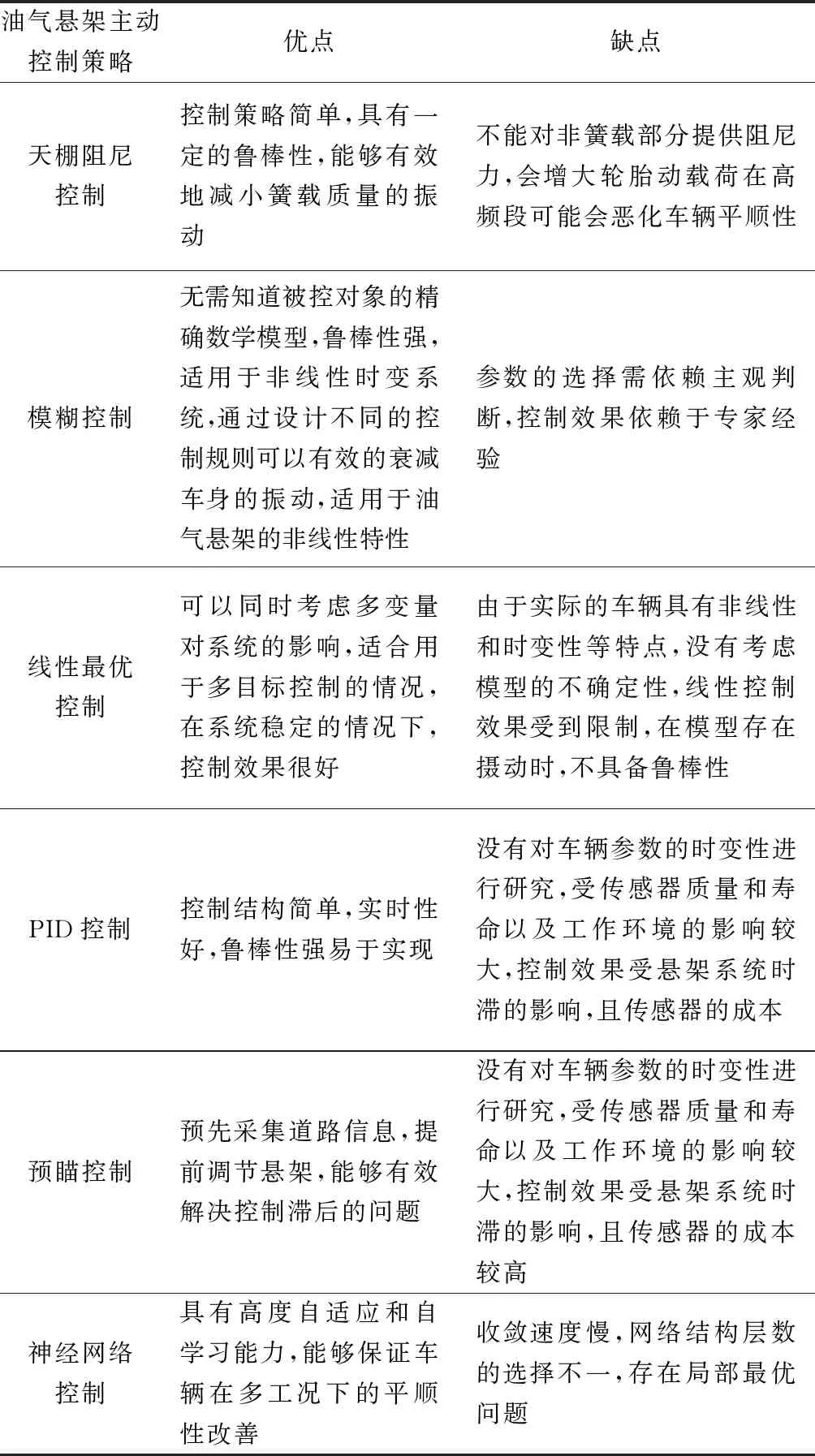
表2 油氣懸架主動控制策略特點對比Table 2 Comparison of active control strategy characteristics of hydro-pneumatic suspension
4 結論與展望
現階段,中外學者對于高速重載車輛的油氣懸架半主動及主動平順性控制研究主要是針對油氣懸架的系統結構優化和控制策略改進方面,經過大量理論研究與實際應用表明,半主動油氣懸架系統和主動油氣懸架系統均能對高速重載車輛的平順性進行有效改善,提高車輛對不同路面和車況的適應能力,提高車輛穩定性。目前由于半主動油氣懸架系統結構簡單、控制效果好,能量耗散低等特點,其實際應用多于主動油氣懸架系統,但主動油氣懸架控制的車輛的路況和車況的適應性能更好,適應范圍更廣。
主動油氣懸架能夠動態的調整懸架的系統性能,適應不同路面和工況,能夠極大的改善車輛在不平路面行駛時的平順性,還能通過調整車身姿態及高度提高車輛的通過性與穩定性。未來高速重載車輛的主動油氣懸架系統的研究發展方向主要包括以下3個方面。
(1)對主動油氣懸架系統結構設計與參數優化設計上。由于目前的主動油氣懸架系統存在結構復雜,占用空間大等問題,如何在保證主動油氣懸架性能的前提下減小主動油氣懸架系統的布置空間和簡化系統結構成為研究的重點。同時主動油氣懸架系統中不同液壓元件的結構參數不同會對油氣懸架的剛度特性和阻尼特性有很大的影響,例如單向閥和阻尼孔的直徑變化會對油氣懸架阻尼特性產生很大的影響,因此如何對結構參數進行優化得到最優值以改善懸架系統性能也十分重要。
(2)對主動油氣懸架系統控制策略的改進上。目前比較成熟的控制算法包括模糊控制,線性最優控制、PID控制、神經網絡控制、預瞄控制以及各種復合控制算法,單一的控制算法一般都會存在一定的局限性,不能兼顧油氣懸架的多方面性能,因此,對于控制策略的研究重點在于如何結合不同的控制算法來克服單一控制算法的局限性,以及結合各種控制策略的特點來進一步優化控制效果。所以對于油氣懸架進行主動控制時,為了取得更好的控制效果,選擇使用復合控制算法成為該方向的發展趨勢。例如神經網絡模糊控制算法,在模糊控制的基礎上建立神經網絡模型,使得模糊控制具有自學習的特點,能夠實現模糊控制器的校正因子以及模糊規則的優化,使得模糊控制系統具有在線學習的能力,該復合控制方法能夠更好的適應多工況多路面下的復雜環境,提高車輛的綜合性能。
(3)對主動油氣懸架系統控制目標的選擇上。目前大部分對于懸架系統控制的研究存在控制目標單一,懸架綜合性能控制效果不佳的問題,該方向的難點在于如何對懸架系統進行多目標控制來改善懸架系統的綜合性能,進而提高車輛的綜合性能。如只對車身的振動加速度進行控制,或只對懸架動撓度進行控制,僅對單一目標進行控制在優化了該目標的同時可能會惡化其他的目標的問題,后續的研究可以考慮使用主動油氣懸架對車輛的多目標進行控制,例如對車身振動加速度和懸架動撓度進行雙目標控制,此外,可以考慮設計分層控制回路來實現對多控制目標的控制,綜合多方面的因素來改善車輛的平順性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32