連續被動式運動訓練器轉速切換協調控制方法
2022-05-19 03:34:34鄭忠文
機械設計與制造 2022年5期
胥 燕,鄭忠文
(1.成都醫學院,四川 成都 610500;2.阜陽師范大學,安徽 阜陽 236000)
1 引言
連續被動式運動訓練器主要用于手術后肩關節、膝關節、踝關節、骨關節等可動域功能的恢復,是在連續被動運動原理基礎上制成的裝置[1-2]。但目前連續式被動式運動訓練器由于動力裝置的原因,存在可靠性差、結構復雜和噪聲大的特點,為此,需要對訓練器轉速切換協調控制方法進行研究。
文獻[3]提出基于預測模型的訓練器轉速切換控制方法,該方法在動力學模型的基礎上建立控制增量形式的預測模型,建立滿足約束條件的預測控制模型,實現運動器轉速切換的控制。文獻[4]提出基于模糊補償的訓練器轉速切換控制方法,該方法采用人機協作映射關系結合模糊補償算法實現訓練器轉速切換控制。但上述方法沒有提取表面肌電信號的特征,控制所用的時間較長,存在控制效率低的問題。
為了解決上述方法中存在的問題,提出連續被動式運動訓練器轉速切換協調控制方法。通過時域分析法將信號轉換為特征值,建立連續被動式運動訓練器的運動學模型,來抑制訓練器扭振,并通過引入角速度和位置作為狀態變量,改善轉速控制的抗干擾能力;設計轉速切換協調控制器,從而提高轉速控制的精度,完成訓練器轉速切換協調控制方法的設計。通過仿真實驗驗證,該方法具有較良好的轉速切換協調控制性能。
2 表面機電信號特征提取
連續被動式運動訓練器轉速切換協調控制方法通過時域分析法將信號轉變為時間變量函數,通過濾波和整形處理獲得Wil?lison幅值、積分機電值、幅值直方圖、平均肌電值、過零次數、均方根六個特征值[5-6]。
設WAMP代表的是Willison值,其計算公式如下:

式中:N—采樣點數量;xi—肌電信號樣本值。
設AV代表的是平均肌電值,其計算公式如下:

肌電信號在不同活動程度肌肉下與基線偏離的程度都不相同,將不同幅值段中存在的SEMG 信號的采樣個數作為有效特征。在提取特征值之前需要選取一個閾值,對正負閾值間存在的距離進行劃分,獲得大小不同的幅值段,將不同幅值段中存在的SEMG采樣點個數作為肌電信號的特征值[7-8]。
設IAV代表的是絕對值積分平均值,可通過下式計算得到:

設ZC代表的是過零點數,連接數據點,并對正負穿越零點的次數進行計算:

設VAR代表的是方差,RMS代表的是均方根,std代表的是標準差,其表達式如下:

式中:xLAV—肌電信號對應的絕對積分平均值;
3 訓練器轉速切換協調控制方法
3.1 訓練器模型
連續被動式運動訓練器模型,如圖1所示。
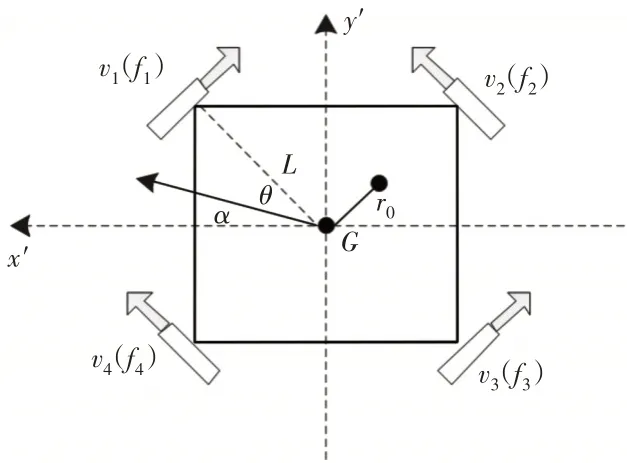
圖1 連續被動式運動訓練器模型Fig.1 Model of Continuous Passive Exercise Trainer
通過下式描述連續被動式運動訓練器的運動學模型:

可用下述公式描述上式:

在上述方程的基礎上獲得速度約束方程v1+v2=v3+v4。
通過下述公式描述連續被動式運動訓練器的運動模型:
通過下述公式描述連續被動式運動訓練器的動力學模型:

M—連續被動式運動訓練器的質量;
f1、f2、f3、f4—系統的輸入;
m—康復者對應的等效質量;
L—全方向輪與中心之間存在的距離;
I—訓練器對應的轉動慣量;
r0—訓練器的中心與重心之間存在的距離。
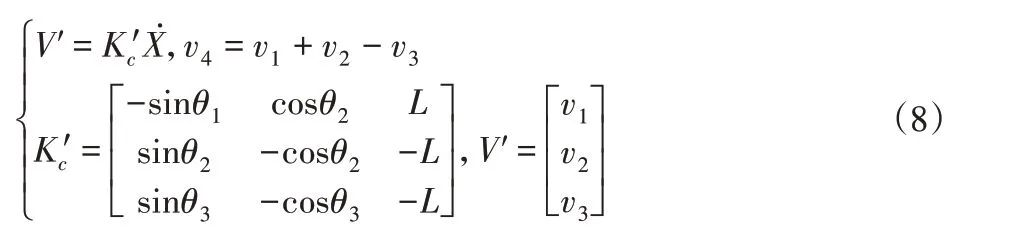
3.2 速度解耦模型
將V′=rw帶入連續被動式運動訓練器的動力學模型中,獲得下式:

式中:w=[w1w2w3]T;r—輪子半徑。
假設在連續被動式運動訓練器中存在4個輸入力,其中存在一個冗余的力,連續被動式運動訓練器在跟蹤過程中只需要3個力就可以完成轉速切換的協調控制[9-10],令f2=f4,獲得整理后的連續被動式運動訓練器的動力學模型,其中:


在數學模型的基礎上構建連續被動式運動訓練器系統的狀態方程:

選取連續被動式訓練器的角速度w和位置X作為狀態變量,獲得放射非線性系統方程:

用下述方程描述連續被動式運動訓練器系統的數學模型:

式中:u—動力學模型的新輸入控制量,可將連續被動式運動訓練器系統的輸出定義為獲得完整的連續被動式運動訓練器的仿射非線性系統模型:

3.3 控制器設計
通過設計反饋控制器實現連續被動式運動器訓練轉速切換的協調控制,根據控制與角速度之間存在的線性關系,設計轉速切換協調控制器:

式中,ei—誤差;Kpi—常數—參考角速度。
4 實驗與分析
為了驗證連續被動式運動訓練器轉速切換協調控制方法的整體有效性,需要對連續被動式運動訓練器轉速切換協調控制方法進行測試,本次測試在MATLAB軟件中進行,操作系統為Win?dows10,CPU 處理器為2.80GHz X64。其中,選取的連續被動式運動訓練器的結構,如圖2所示。
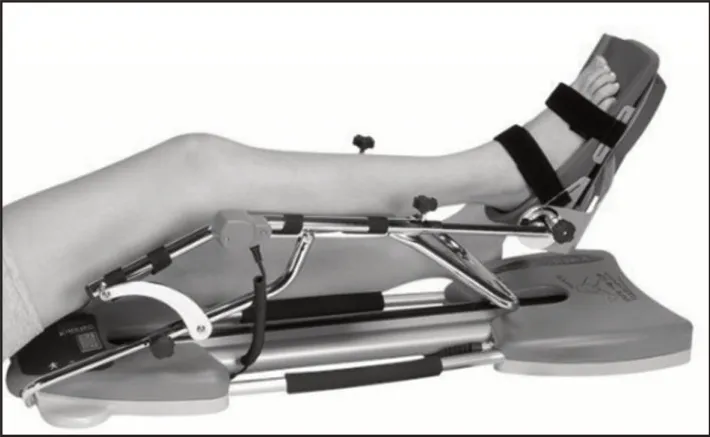
圖2 連續被動式運動訓練器結構示意圖Fig.2 Structure Diagram of Continuous Passive Sports Trainer
將轉速控制誤差作為測試指標,采用連續被動式運動訓練器轉速切換協調控制方法(方法1)、基于預測模型的訓練器轉速切換控制方法(方法2)和基于模糊補償的訓練器轉速切換控制方法(方法3)進行對比實驗,連續被動式運動訓練器系統控制的轉速對比結果,如圖3所示。
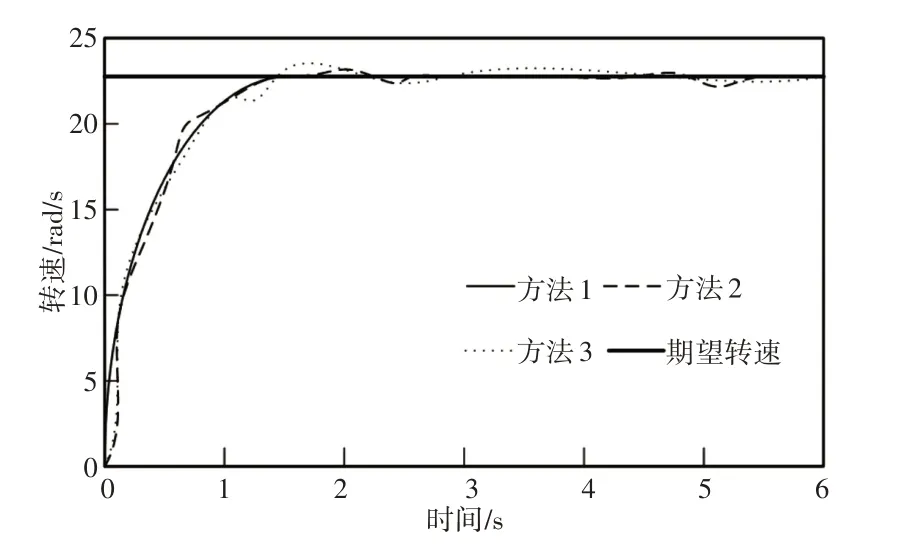
圖3 連續被動式運動訓練器系統控制的轉速對比結果Fig.3 Speed Comparison Results of Continuous Passive Sports Trainer System Control
統計三種方法下多次迭代的平均轉速控制誤差,測試結果,如圖4所示。
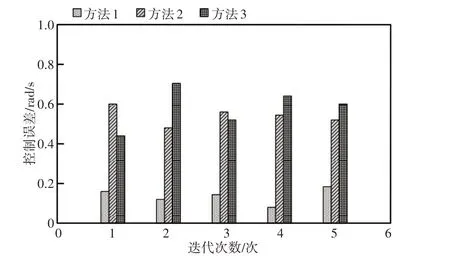
圖4 控制誤差測試結果Fig.4 Control Error Test Results
分析圖4 中的數據可知,采用方法1 對運動訓練器轉速進行協調控制時在多次迭代中的控制誤差均控制在0.2rad/s以下,采用方法2和方法3對運動訓練器轉速進行協調控制時,獲得的控制誤差分別在第1 次迭代和第2 次迭代中高達0.6rad/s 和0.7rad/s,方法1進行協調控制的誤差較低,因為方法1獲取了表面肌電信號,并提取了表面肌電信號的特征,降低了方法1的控制誤差。
設置穩定性系數φ,在區間[0,1]內取值,穩定性系數越高,表明控制方法的控制穩定性越好,測試結果,如圖5所示。
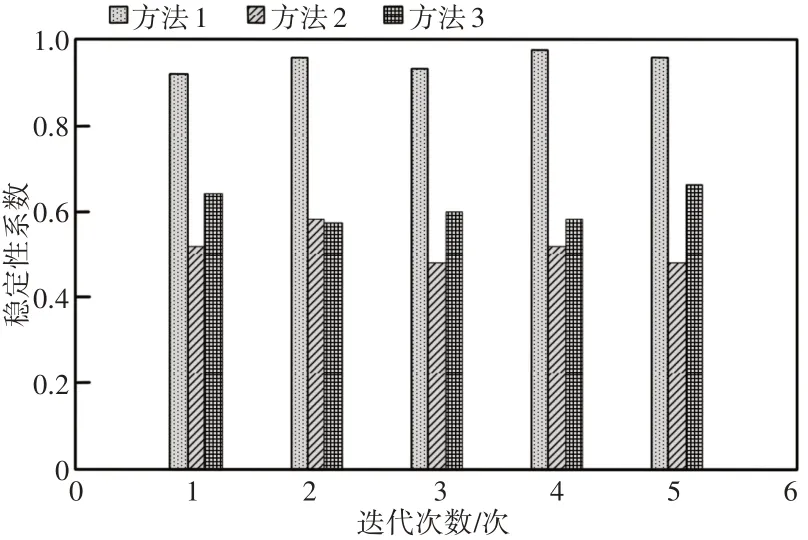
圖5 穩定性系數測試結果Fig.5 Test Results of Stability Coefficient
對圖5中的數據進行分析可知,采用方法1對運動訓練器的轉速切換進行控制時,在多次實驗過程中獲得的穩定性系數均在0.9以上,方法2和方法3對運動訓練器的轉速切換進行控制時,在多次實驗過程中獲得的穩定性系數分別在0.5和0.6附近波動,方法1的穩定性系數遠遠高于方法2和方法3的穩定性系數,因為方法1根據獲取的表面肌電信號特征構建了連續被動式運動訓練器系統的動力學模型,提高了控制穩定性。
將控制效率作為測試指標,采用方法1、方法2和方法3進行測試,通過控制時間對比不同方法對運動訓練器轉速切換控制的效率,測試結果,如圖6所示。
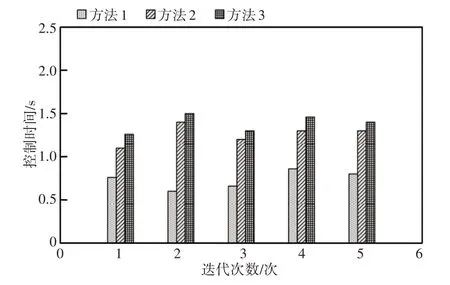
圖6 控制效率測試結果Fig.6 Control Efficiency Test Results
通過圖6可知,在多次控制實驗過程中,方法1將控制時間保持在1.0s之內,方法2和方法3的控制時間均高于1.0s。方法1控制運動訓練器轉速切換所用的時間較少,因為方法1獲取了表面肌電信號,根據表面肌電信號的特征在較短的時間內建立轉速切換協調控制器,提高了方法1的控制效率。
5 結束語
這里提出連續被動式運動訓練器轉速切換協調控制方法,獲取表面肌電信號,并提取信號特征,根據提取的特征構建轉速切換控制器,實現連續被動式運動訓練器轉速切換。通過仿真實驗證明,設計方法的轉速控制誤差保持在0.02rad/s之內,穩定性系數在0.9以上,控制時間保持在1s之內,整體轉速切換協調控制性能較好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
