基于滑模變結構的高速動能彈制導控制算法*
2022-05-19 08:15:26焦思洋潘濤孔哲劉寶寧
現代防御技術 2022年2期
關鍵詞:結構
焦思洋,潘濤,孔哲,劉寶寧
(西安航天動力技術研究所,陜西 西安 710025)
0 引言
高速動能導彈作為一種新型現代防御武器,其作戰目標是地面裝甲坦克,采用飛行高度10 m左右的低空貼地式飛行,其戰術特點是利用自身高速度、大動能直接碰撞摧毀目標[1]。與傳統反坦克導彈有所不同,高速動能彈的馬赫數高達5,需采用響應速度更快的脈沖發動機直接力控制策略[2]。當脈沖發動機在低空環境中點火工作時,會引起周圍流場發生劇烈變化[3-4]。由于高速動能彈本身的高速度大動能、氣動參數偏高,劇烈的流場變化會產生較大的干擾力矩,采用傳統控制方法可能會造成控制精度不佳[5]。因此,本文選擇魯棒性相對較強的滑模變結構控制方法,設計出一種新型基于滑模變結構的高速動能彈制導控制方法,來實現對目標的精準打擊。
1 彈體模型建立
1.1 彈體結構模型建立
本文談論的高速動能導彈彈體前端采用陣列式脈沖發動機,共7排從彈體頭部往后排列,彈體尾部無氣動舵,依靠脈沖發動機進行姿態控制。其結構布局如圖1所示。

圖1 彈體結構示意圖Fig.1 Str uctur e diagram of missile
1.2 高速動能彈動力學模型建立
高速動能彈為滾轉導彈,在分析彈體運動時,在建立常用的地面系Oxyz、彈體系Ox1y1z1、彈道系Ox2y2z2、速度系Ox3y3z3之外,通常引入2個新的坐標系:準彈體系Ox4y4z4、準速度系Ox5y5z5。根據滾轉導彈運動方程組,建立高速動能彈動力學模型。
2 基于滑模變結構的高速動能彈控制算法
高速動能彈控制系統主要由制導站、慣性測量單元、制導控制算法、執行機構(脈沖發動機)等單元組成,其結構如圖2所示。本文主要針對高速動能彈的制導控制算法進行設計研究。高速動能彈通常以低空貼地飛行的方式打擊地面裝甲武器,采用三點法導引更加簡單易行且抗干擾性能好。三點法的原理是:作戰過程中導彈始終處于制導站與目標的連線上,以此方式導引彈體命中目標[6]。本文將設計出一種三點法導引的滑模變結構制導控制算法,實現彈體對目標的精確打擊。
圖2 高速動能彈控制系統結構示意圖Fig.2 Str uctur e diagram of hyper velocity kinetic energy missile’s control system
2.1 滑模變結構控制
滑模變結構控制的控制原理是:在系統x?=f(x)的狀態空間中,設計一個切換面s(x)=0將狀態空間分為s>0及s<0 2個部分。通過控制策略的設計,使得系統在s(x)=0兩側擁有不同的結構,這種結構的變化迫使切換面以外的點均運動趨近于切換平面,隨后在切換平面附近進行小幅度的振蕩運動[7],通過這種方式達到控制系統狀態的目的。
2.2 基于滑模變結構控制的控制算法推導
以俯仰通道為例,制導過程中的導彈、目標位置關系如圖3所示,O為地面制導站位置,M為導彈當前位置,T為打擊目標位置,直線OT為飛行過程中的基準線,θt為制導站與目標的連線與水平面的夾角。

圖3 導彈與目標位置關系示意圖Fig.3 Position schematic of missile and target
設e為導彈縱向位置(ym)與基準線OT的縱坐標差值,即e=ym-xmtanθt。因高速動能導彈打擊的地面目標一般為地面固定目標或是移動速度較慢的目標,假設θt的值不會隨時間變化而變化。可以進一步推導得出:

式中:vx,vy和ax,ay分別為彈體x,y方向的速度和加速度。
針對高速動能彈的彈體特性,可采用俯仰通道擾動方程組最簡形式[8]:
式中:?為俯仰角;θ為速度傾角;α為攻角;δz為舵偏角(在不含氣動舵的直接力控制系統中表示縱向直接力);Fgy,Mgz為y向干擾力和z向干擾力矩;a22,a24,a25,a26,a34,a36為動力系數。
暫不考慮干擾影響,由上述方程組可得,

式中:v為俯仰通道合速度。
設滑模變結構算法中的切換函數為s=ce+?,其中c為常數。則
式中:d為因模型簡化、高速動能彈脈沖噴流形成干擾等原因導致的?變化量,假設d的取值會在一個界值范圍內,即|d|≤D,
?=0時,
若要滑模算法穩定,必須保證?<0。取η>D,設計滑模控制律為
定義李雅普諾夫函數為

則
當s>0時,
可證系統漸進穩定。
2.3 參數設定
2.2 節推導出的滑模控制律即式(7)中有2個參數c和η需要設計確定。在滑模變結構算法中,c的取值影響位置誤差在控制算法中的權重,同時也決定了收斂速度;η則用來克服干擾誤差項造成的影響。這2個參數選取不當會造成控制系統精度不夠、抖振加劇等問題[9]。本文將根據高速動能彈自身的彈體特性及作戰目標需求,來對滑模控制算法相關參數的設計進行整定。
由式(7)可以推導出關于η的關系式為

初步選取一個參數c的數值,對高速動能彈作戰飛行時的相關數據進行取值:脈沖發動機的最大推力為400 N,故取δz為400 N;根據經驗分析動能彈的運動規律,對俯仰角速度?和角加速度?取期望的最大值。通過式(12)對參數η進行實時計算,選取整個過程中的最大值,作為算法中參數η的取值。
將整個系統控制框圖簡化后如圖4所示,計算求出彈體開環回路的傳遞函數,得到開環傳遞函數的開環增益。滑模制導控制算法中c為位置誤差項系數,當輸入位置誤差項為1時,輸出的位置誤差為Kc。現設定彈體飛行過程中允許的最大位置誤差(輸出位置誤差)為2 m,可以反推出參數c的取值。之后再次進行對η的迭代設計,可以達到更加精細化的結果。最終推算得出針對本文研究的高速動能彈的參數c取值為1.8,η取值為20。
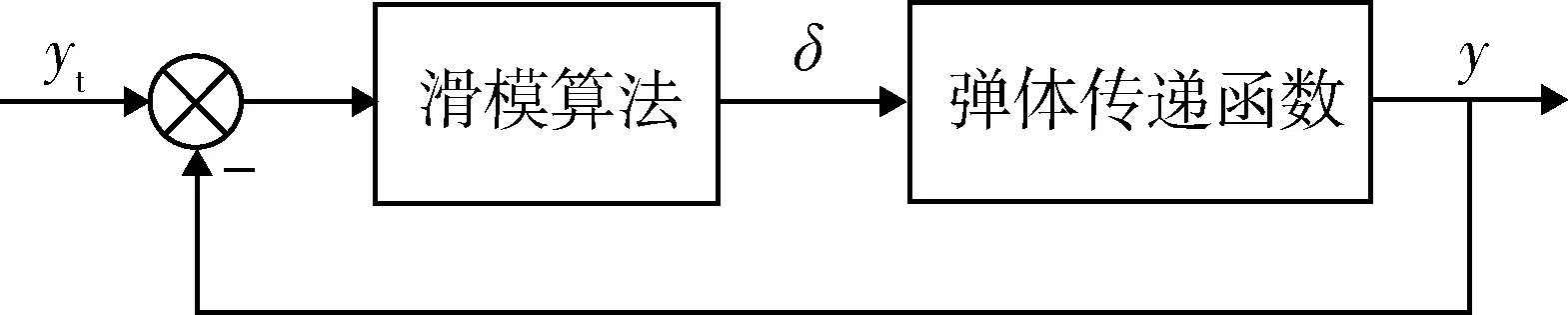
圖4 系統簡化框圖Fig.4 Simplified block diagr am of the system
設定導彈起始位置為(0,3)m,位置目標為(4 000,0)m,在仿真軟件中對導彈進行彈道仿真。用設計推算出的滑模變結構制導控制算法對彈體進行控制,仿真得到相關結果如圖5~8所示。
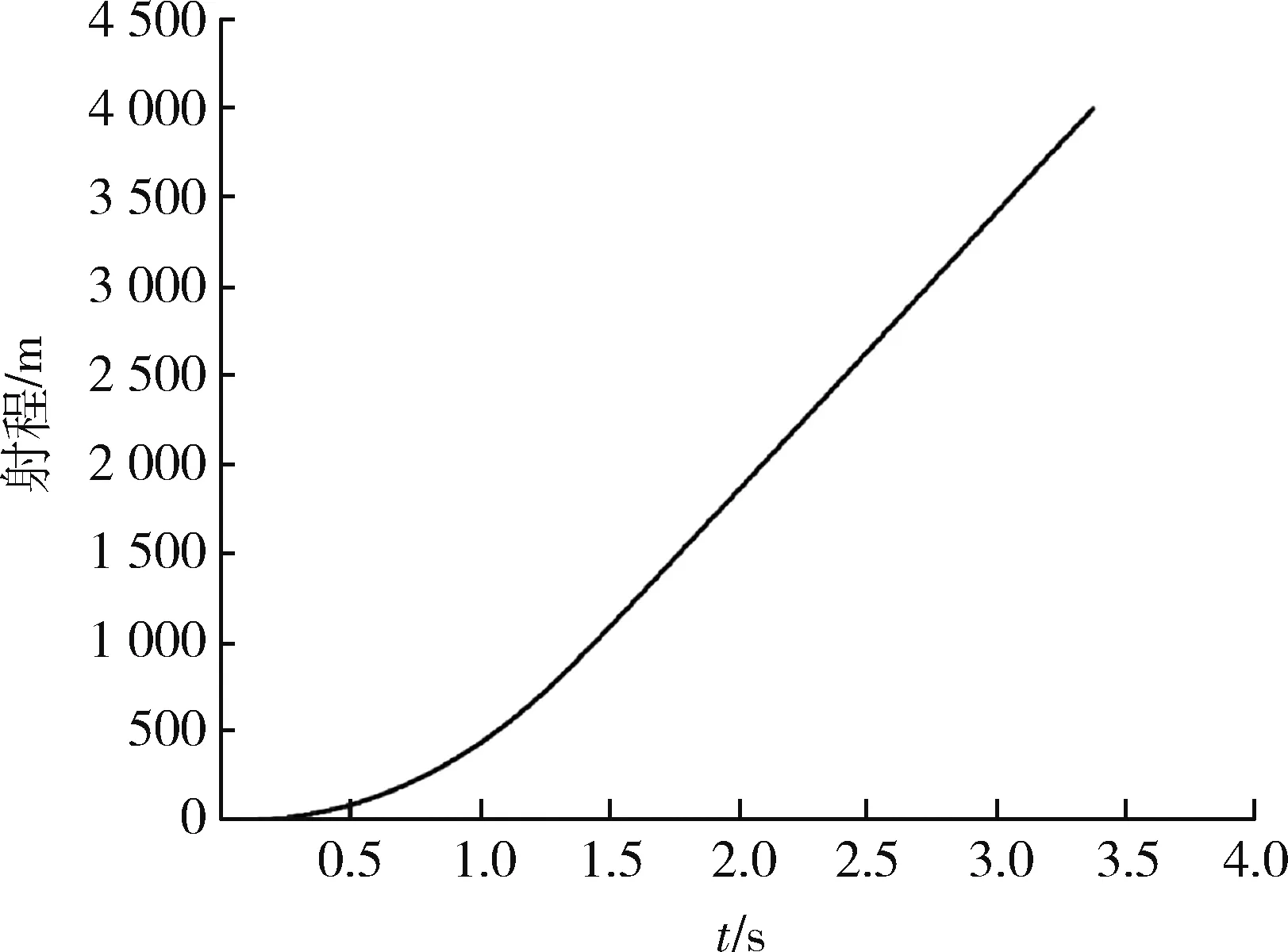
圖5 射程隨時間的變化圖Fig.5 Range-time
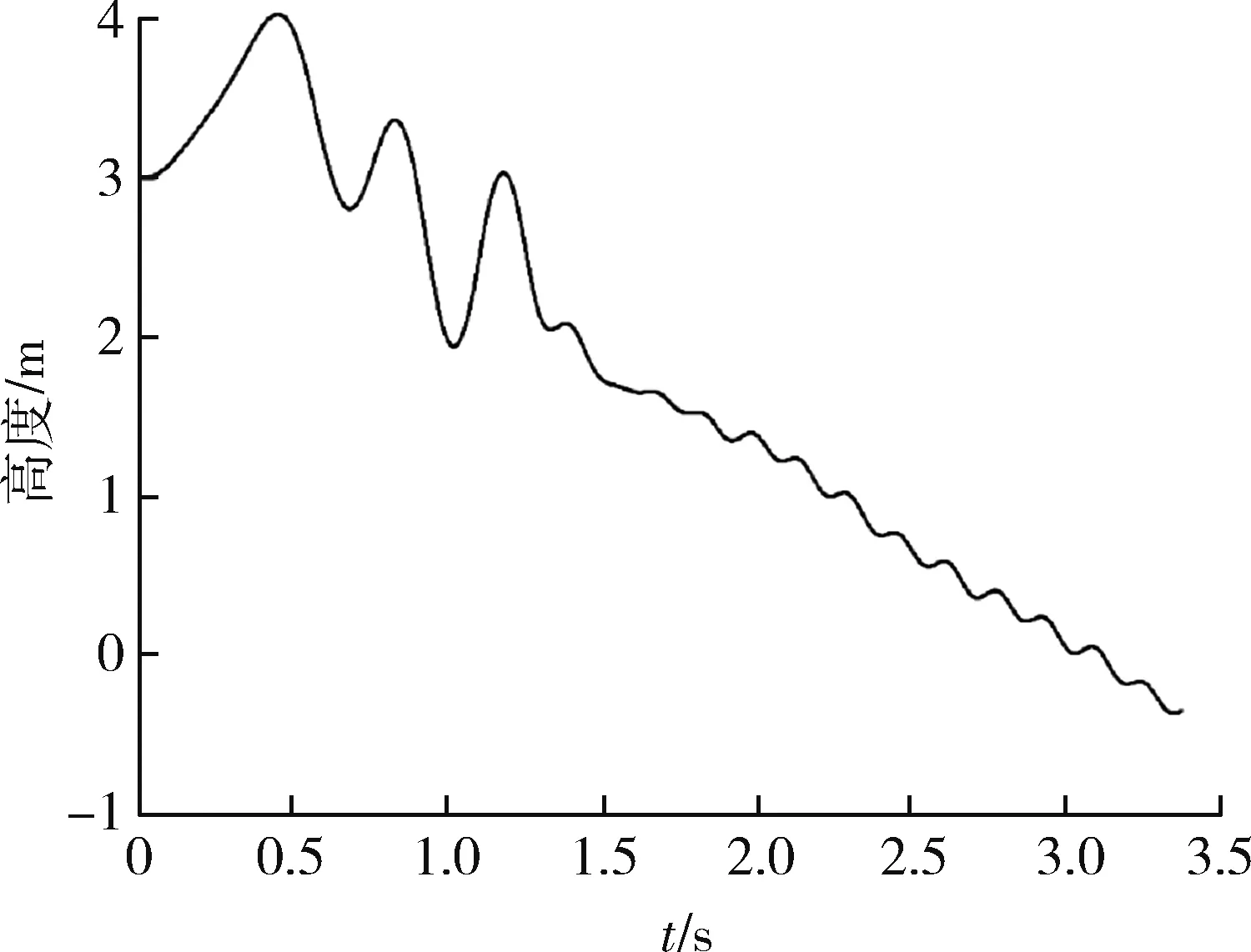
圖6 高度隨時間的變化圖Fig.6 Height-time
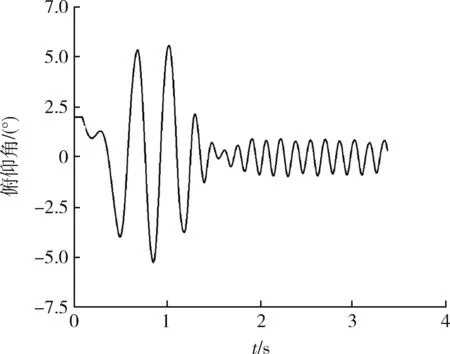
圖7 俯仰角隨時間的變化圖Fig.7 Pitch-time
從仿真結果可以看出,彈體的落點坐標為(4 000,-0.3)m,表明本文設計的滑模變結構制導控制算法能夠控制彈體命中目標。但俯仰角和俯仰角速度的變化曲線表明,穩定后的滑模抖振幅度較大。
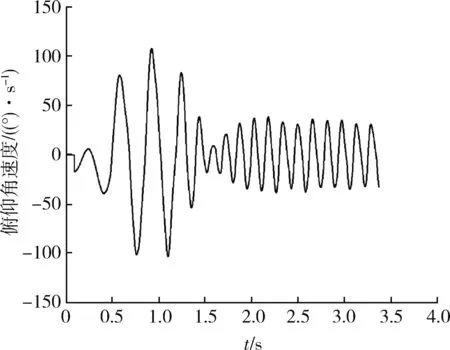
圖8 俯仰角速度隨時間的變化圖Fig.8 Pitch angular velocity-time
2.4 滑模變結構抖振問題研究
從理論的角度來看,控制算法的滑動模態可以根據任務需求進行設計,并且系統的滑模運動與外界的干擾因素及自身參數變化無關,這也就是滑模變結構控制相比于傳統控制方法魯棒性更強一些的原因[10]。
理想的滑模變結構控制算法,假設結構變換過程中無時間和空間的滯后即具有理想的開關特性,且所有狀態量均精確無誤,滑動模態可以實現光滑運動且漸進穩定于原點[11](即不會產生抖振)。但實際中,系統的軌跡到達切換面時具有一定的速度,由于開關的時間、空間滯后,算法對狀態的控制作用有一定的延遲時間,故運動點會在慣性的作用下穿越切換面,最終導致滑模抖振。因此,滑模抖振問題不可避免[12],需要采取一定的措施對其進行削弱。本文將采取邊界層法和指數趨近律法2種方法對抖振問題進行處理。
2.4.1 邊界層法
由上文分析知,滑模變結構控制算法理想的開關切換特性在實際中根本無法存在,通常在切換平面附近設計一個邊界層Δ,在邊界層外時,使用切換控制,使系統狀態能快速趨于滑動模態;在邊界層內時,使用線性化反饋控制[13]。具體做法為:用飽和函數sat(s)代替滑模變結構控制算法中符號函數sgns。
式中:k=,則經邊界層法處理后的滑模控制律表達式為
2.4.2 指數趨近律法
趨近律法的整體思路是通過使整個系統狀態軌跡能夠較為平滑地通過滑動模態,從而避免不斷切換控制結構所造成的系統抖振[14]。本文采用目前常用的指數趨近律法[15]:

式中:s?=ks為指數趨近項,其解為s=s(0)e-kt,為指數形式。
因此,當系統狀態距離切換平面較遠時,能夠快速趨近于切換面;而當運動逐漸接近切換平面時,趨近速度會大大降低,從而在快速趨近的同時適量削弱抖振。增加s?=-εsgns項的作用在于,當s接近0的時候,趨近速度不會為0而是ε,能夠確保在有限時間內到達切換面。
將式(14)代入上文關于s?的表達式(5)中,得

則滑模控制律為

由于干擾項d的值未知,無法直接應用,需對其進行設計處理。取控制律為
將控制律式(16)代入關于s?的表達式(5)中,得

假設干擾項d的取值范圍為:dL≤d≤dU。為了保證ss?<0,可選取

當s>0時,?=dL-d-εsgns-ks<0,
當s<0時,?=dU-d+ε-ks<0.
滿足滑模收斂條件,確保系統穩定。
3 仿真分析
3.1 算法仿真
對滑模變結構制導控制算法分別采用邊界層法和指數趨近律法進行抖振削弱,使用軟件對其建模仿真,仿真結果如圖9~15所示。
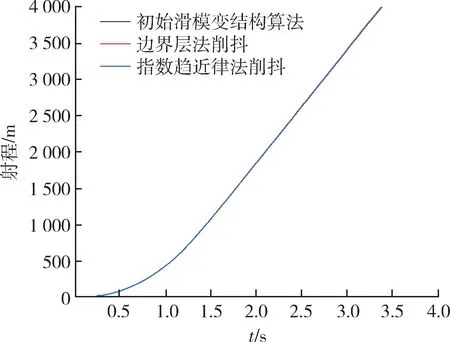
圖9 射程隨時間的變化圖Fig.9 Range-time

圖10 高度隨時間的變化圖Fig.10 Height-time
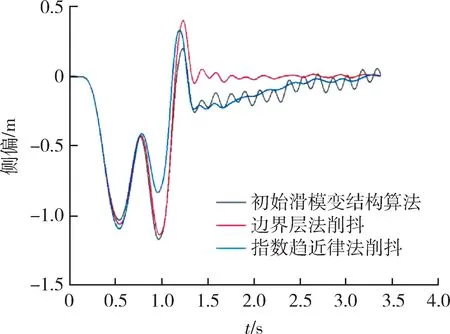
圖11 側偏隨時間的變化圖Fig.11 Yaw-time
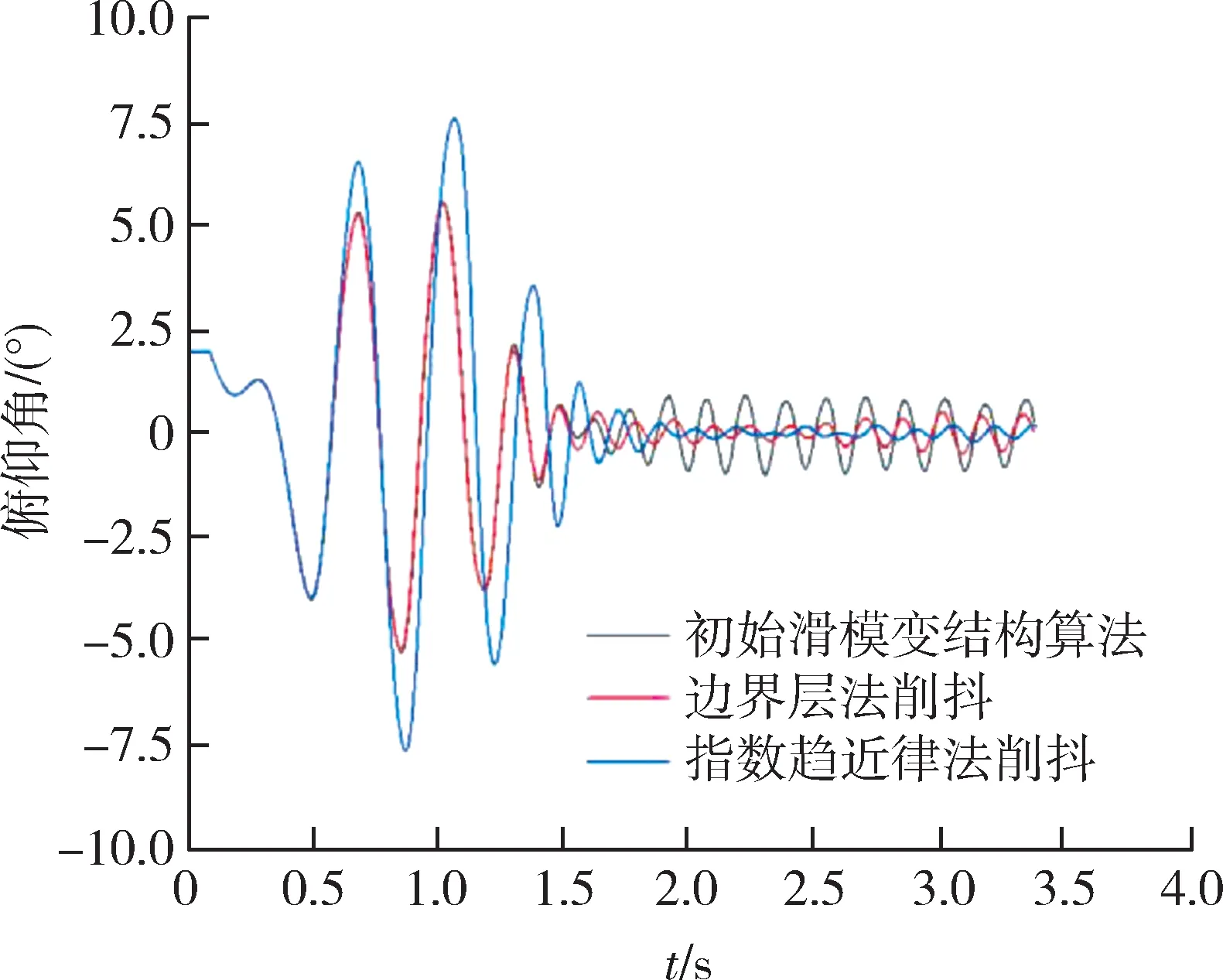
圖12 俯仰角隨時間的變化圖Fig.12 Pitch-time
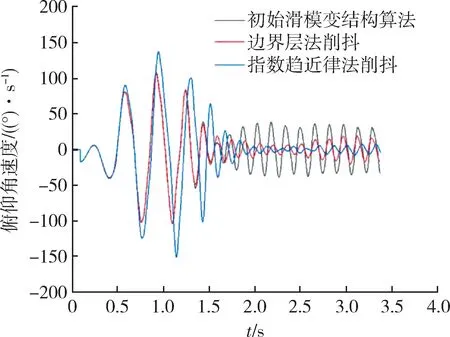
圖13 俯仰角速度隨時間的變化圖Fig.13 Pitch angular velocity-time
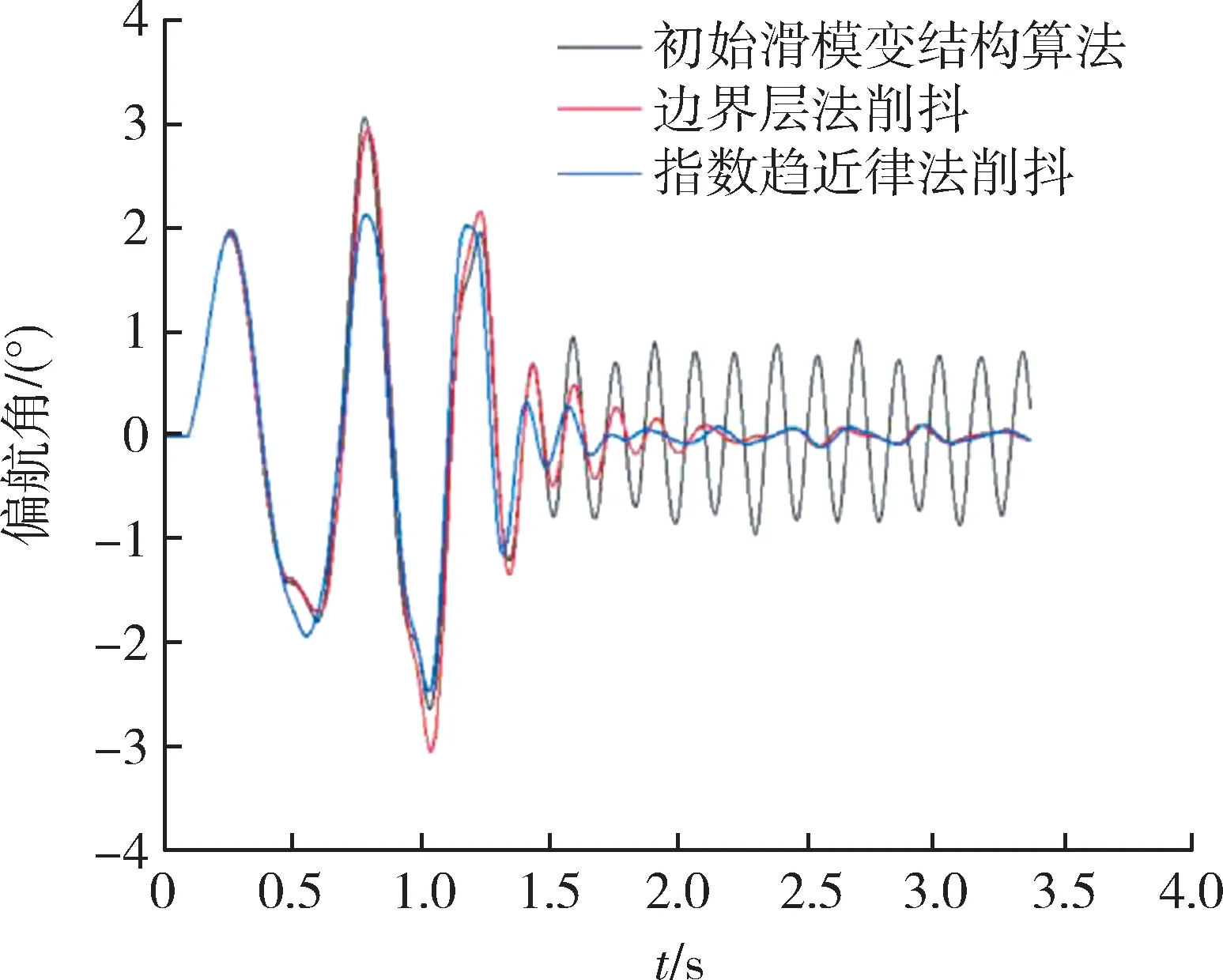
圖14 偏航角隨時間的變化圖Fig.14 Yaw angle-time
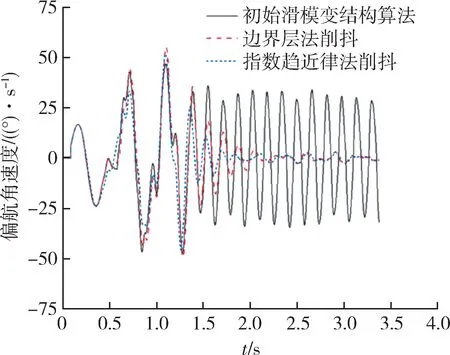
圖15 偏航角速度隨時間的變化圖Fig.15 Yaw angular velocity-time
設定導彈初始位置為(0,3,0)m,目標位置為(4 000,0,0)m。從仿真結果來看,彈體的落點位置在(4 000,-0.2,0.1)m,表明滑模控制算法能夠控制彈體命中目標。俯仰通道上,穩定后的俯仰角在±1°之間振蕩,俯仰角速度在±45(°)/s之間振蕩;偏航通道上,穩定后的偏航角在±1°之間振蕩,偏航角速度在±45(°)/s之間振蕩,抖振幅度都較大。經邊界層法處理的算法能使穩定后俯仰角、俯仰角速度、偏航角、偏航角速度的振蕩浮動分別處于±0.5°,±15(°)/s,±0.04°,±1.5(°)/s之間;經指數趨近律法處理的算法能使穩定后俯仰角、俯仰角速度、偏航角、偏航角速度的振蕩浮動分別處于±0.3°,±10(°)/s,±0.05°,±1.8(°)/s之間,且2種方法均能控制導彈命中目標點附近。證明經邊界層法和指數趨近律法處理過后的滑模抖振問題,可以得到較好的抑制。
3.2 大擾動環境下仿真分析
高速動能彈飛行方式為貼地飛行,當脈沖發動機在低空中工作時,會引起周圍氣流發生強烈變化,由于彈體本身的高速度、大動能,氣動系數偏高,流場的劇烈變化會產生較大的干擾力矩。
高速動能彈在高速飛行過程中,受到的干擾力矩變化快,范圍波動大,測量難度較大。為驗證彈體在大擾動力矩的影響下是否依舊能夠命中目標:以縱向平面為例,對彈體縱向依次添加大小為0,50,80,100,120,130 N·m的脈沖干擾力矩,分別使用傳統PID(proportional integral derivative)控制方法和本文所設計的滑模變結構制導控制算法對高速動能彈進行控制仿真。
假設目標坐標為(4 000,0)m,使用傳統PID控制方法的彈體仿真結果如圖16,17所示。
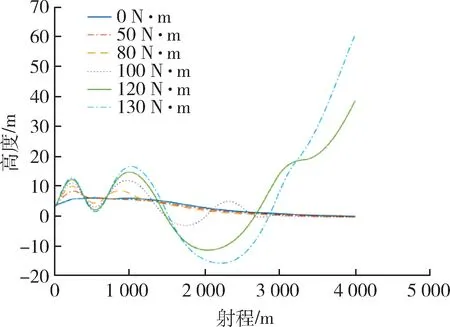
圖16 導彈位置變化圖Fig.16 Mission position change
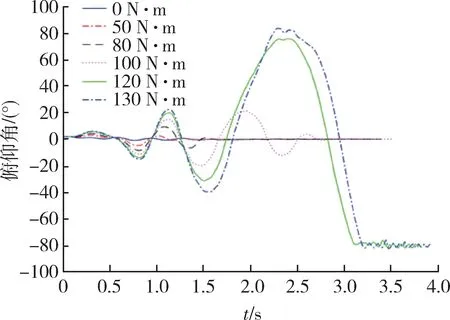
圖17 俯仰角隨時間的變化圖Fig.17 Var iation of pitch angle with time
使用滑模變結構制導控制算法的彈體仿真結果如圖18,19所示。
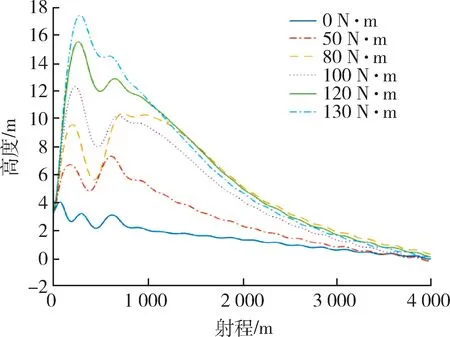
圖18 彈體位置變化圖Fig.18 Mission position change
對不同干擾力矩影響下的導彈落點進行整理,結果如表1所示。
表1 導彈落點位置表Table1 Missile landing point coordinates m
觀察比對以上數據可以發現,傳統控制方法在不加干擾力矩及小力矩影響下,彈體可以很好地命中目標坐標。但隨著擾動力矩增大,俯仰角的幅值變得越來越大,當擾動力矩達到120 N·m之后,會出現彈體失控、位置發散,導彈無法命中目標。反觀使用滑模變結構算法控制的彈體,在加入相同大小的擾動力矩時,俯仰角最終都可穩定在1°以內;導彈落點均可命中目標坐標。
圖19 俯仰角隨時間的變化圖Fig.19 Var iation of pitch angle with time
當高速動能彈以高速度在低空飛行時,會有劇烈的流場變化,產生強度較大的干擾力矩。相比于傳統控制方法,本文設計的滑模變結構制導控制算法在大擾動力矩的干擾下精度更高,魯棒性更強。故高速動能彈使用滑模變結構制導控制算法時控制效果更加出色。
4 結束語
本文推導出了一種新型基于滑模變結構的高速動能導彈制導控制算法,并對滑模變結構算法存在的固有抖振問題進行了相應處理。仿真結果表明,本文提出的新型制導控制算法能夠控制彈體準確打擊目標,經處理后的滑模抖振問題也能得到一定的削弱;且比傳統方法在大力矩擾動情況下精度更高,具有一定的工程應用前景。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50