雙電機同步消隙伺服系統的魯棒滑模控制策略*
2022-05-19 08:16:04李方俊王生捷
現代防御技術 2022年2期
李方俊,王生捷
(北京機械設備研究所,北京 100854)
0 引言
針對某大慣量交流伺服系統,如何克服末端齒輪傳動結構齒隙對系統控制性能的影響具有十分重要的意義。在單電機驅動控制方案中,國內外眾多學者提出了許多消除齒隙影響的算法,如根據齒隙的數學模型,在反步法設計過程中對齒隙進行補償[1-4];利用狀態觀測器對齒隙大小進行估計[5-6]。但以上方法對系統模型建立精度要求較高,且算法實現復雜,傳動結構存在較大的變形與應力,故在大慣量齒輪傳動系統中常采用雙電機同步消隙驅動方案[7-9]。
常見的雙電機同步消隙伺服系統由電流環、速度環以及位置環構成,采用變偏置力矩曲線施加置電流環上對齒隙進行補償。此種方法不依賴于齒隙的數學模型,控制算法實現簡單,延長了機械結構的使用壽命[10]。同時,采用交叉耦合方式來減小兩側電機速度偏差引起的結構沖擊[11-13]。但此種控制方法仍存在不足之處,如系統響應速度較慢且對內部結構參數變化以及外部擾動魯棒能力較弱,在運行過程中產生的沖擊力將打破系統的靜態平衡,甚至引起結構的抖動。
本文提出了一種以反步控制理論為基礎,僅由位置環和電流環構成的新型雙電機同步消隙伺服系統控制方案。在控制器設計過程中引入了一種積分非奇異終端滑模面,削弱了滑模控制常見的抖動問題,使得系統在有限時間內達到平衡狀態;系統的參考位置指令采用指令濾波的方式,避免了在控制器設計中求導過程導致的控制量過大的問題。為了克服外在擾動的影響,系統引入了擴張狀態觀測器對擾動力矩進行補償。在Matlab/Simulink與Adams中的聯合仿真實驗結果,證明了本文所設計方案能有效提高雙電機同步消隙伺服系統的響應能力及魯棒性能。
1 雙電機同步消隙系統數學模型
如圖1所示為雙電機驅動系統的示意圖,從圖中可看出,兩側電機輸出力矩經減速器作用后傳遞至系統末端的齒輪傳動機構,從而帶動負載運行。

圖1 雙電機驅動系統Fig.1 Dual-motor driving system
由于永磁同步電機體積小、功率密度大的特點,在交流傳動系統中得到了廣泛的應用,其數學模型可以表示為
式中:Ld,Lq為d,q軸電感;id,iq為d,q軸電流;Ud,Uq為d,q軸電壓;R為定子電阻;λf為轉子磁鏈;ωe為電角速度;np為電機極對數;Te為電磁力矩。
經減速器作用后,系統的動力學方程可表示為
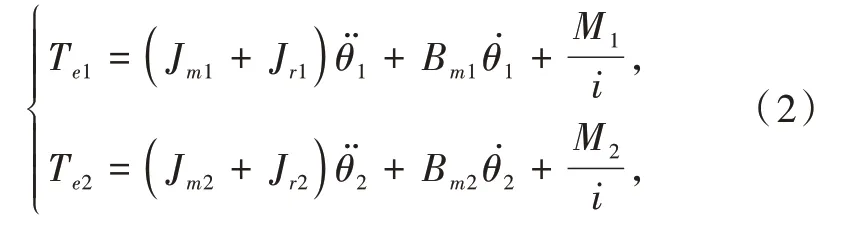
式中:Jm1,Jm2為電機轉動慣量;Jr1,Jr2為減速器轉動慣量;θ1,θ2為電機轉動機械角度;Bm1,Bm2為動摩擦因數;M1,M2為減速器輸出力矩;i為減速器傳動比。
減速器輸出至末端小齒輪結構的動力學方程為
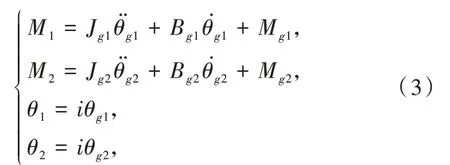
式中:Jg1,Jg2為小齒輪轉動慣量;θg1,θg2為小齒輪轉動角度;Bg1,Bg2為動摩擦因數;Mg1,Mg2為大小齒輪間的傳遞力矩。
齒輪傳動結構間的動力學方程為
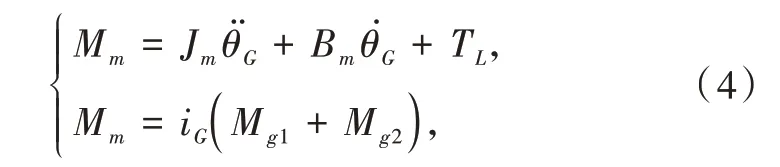
式中:Jm為大齒輪與負載的轉動慣量;θG為大齒輪的轉動角度;Bm為動摩擦因數;Mm為大齒輪與負載的驅動力矩;TL為外部擾動力矩;iG為大小齒輪的傳動比。
由于齒隙的影響,大小齒輪間的傳遞力矩變化并不連續,根據常見的齒隙死區模型,其數學模型可表示為
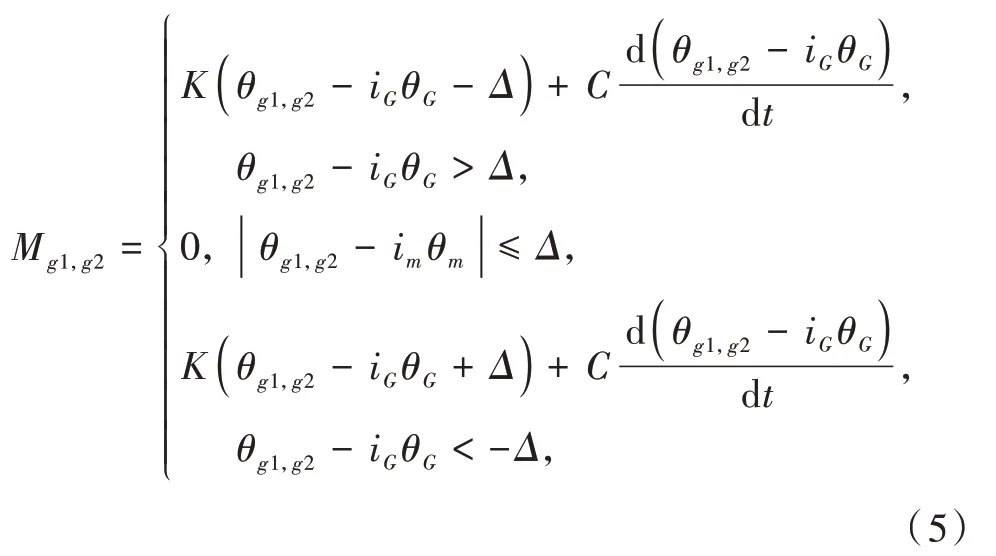
式中:Δ為齒隙的間隙大小;K為齒輪間的接觸力剛度系數;C為接觸摩擦系數。為了克服齒隙的影響,在雙電機驅動伺服系統中常采用預加變偏置力矩的方式來補償結構中的傳動間隙,原理圖如圖2所示。
如圖2所示,根據參考電流指令輸入值的大小,可將偏置電流曲線分為3部分:
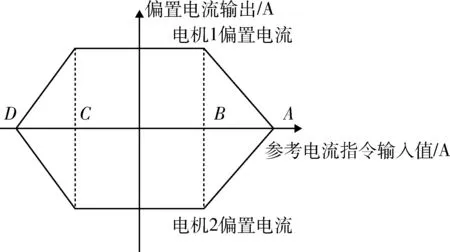
圖2 變偏置電流原理圖Fig.2 Var iable bias cur r ent schematic diagr am
(1)在BC段內,施加于兩側電機的偏置電流處于最大值且方向相反,此時雙電機處于互相出力阻礙運動狀態。
(2)在AB與DC段內,隨著負載的逐漸增加,參考電流指令絕對值也逐漸變大,這一過程中為了提高電能的利用率,將使偏置電流曲線以固定速率恒定衰減。
(3)當負載在原有基礎上進一步變大,參考電流指令絕對值已超出AB段與DC段的范圍,兩側電機偏置電流大小衰減為0。
為了保持雙電機驅動系統中兩側電機的轉速平衡,減小兩側電機轉速差異引起的結構沖擊,在雙電機同步消隙伺服系統中常采用交叉耦合均速負反饋方式設計系統的轉速閉環,系統的傳動部分控制框圖如圖3所示。
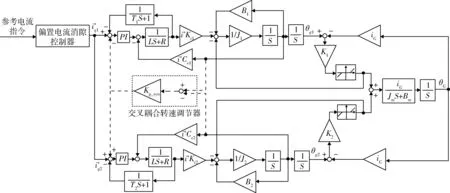
圖3 系統傳動部分控制框圖Fig.3 Control block diagram of the system transmission part

式中:T1,2為電流濾波系數;Kt1,t2為 電 機 力 矩 系 數;Ce1,e2為反電勢系數;Kp_syn為轉速同步調節器比例系數。
2 新型雙電機驅動算法設計
2.1 反步積分非奇異終端滑模(BINTSM)控制器設計
為了簡化傳統雙電機同步消隙伺服系統的控制結構,提高系統的響應能力及魯棒能力,本文基于反步控制理論設計了系統的新型控制算法,具體過程如下:
依據式(4),可將大齒輪及負載動力學方程改寫為
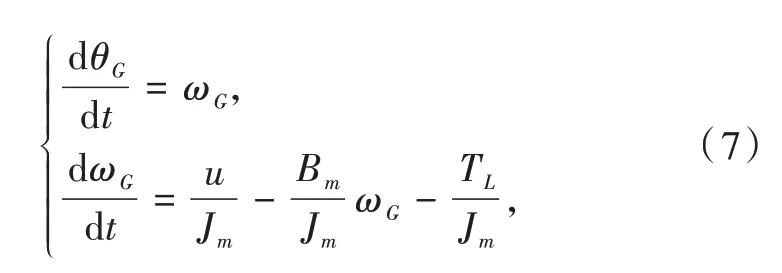
式中:ωG為大齒輪轉動角速度;u為兩側電機驅動大齒輪及負載運行的驅動力矩。
令x1=θG,x2=ωG,?=Bm Jm,Λ=TL/Jm,yr為位置指令參考值,依據反步法構造新的狀態變量z1,z2為

式中:α1為反步法中的虛擬控制變量,現構造第1步Lyapunov函數為

則

令α1=-c1z1(c1為正比例系數),代入式(10)可得

由式(11)可知,當z1,z2趨近于0時,能保證V?1≤0,因此V1正定,V?1負定,能保證第1步Lyapunov函數的穩定。
下一步為了提高系統的響應能力及面對結構參數變化的魯棒能力,在此步設計中引入了積分非奇異終端滑模面。相較于其他滑模面,積分非奇異終端滑模面具有控制量抖動小,收斂速度快的優點[14-15],因此可設計反步法的第2步Lyapunov函數為

這里采用指數趨近率S?=-Dsgn(S)-Ks S,D>0,Ks>0,對控制器輸出u進行計算可得
考慮到齒隙已被前文所述變偏置力矩方法所補償,可得

則最終反步積分非奇異終端滑模(backstepping integral nonsingular terminal sliding mode,BINTSM)控制器的輸出電流參考值為
2.2 穩定性證明
將式(14)代入(13)中可得

現對的穩定性進行討論:
通過選取D值可使D≥|Λ|成立,則D|S|+ΛS≥0成立;由于β,p,q,Ks均為正數,故對的正負進行分析:

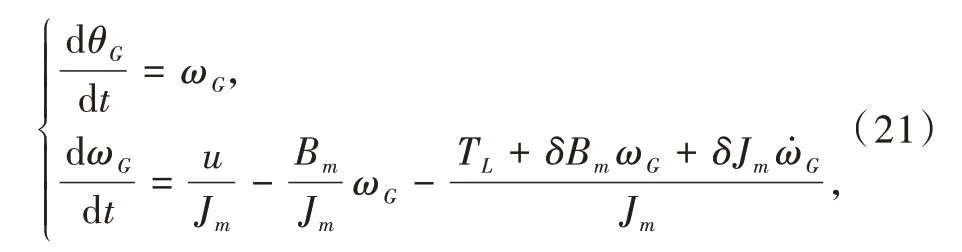
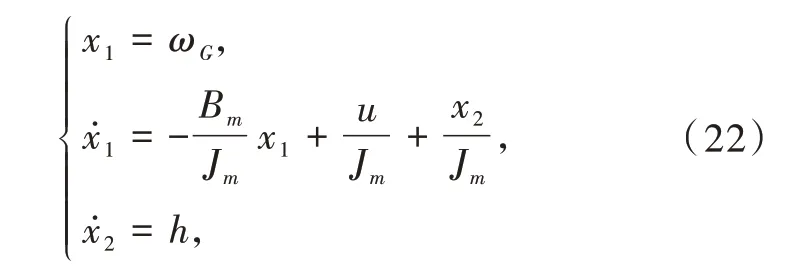
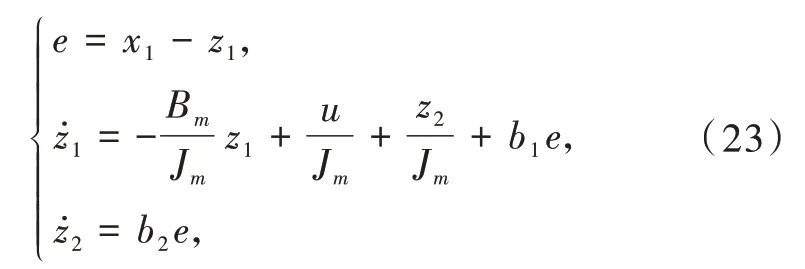
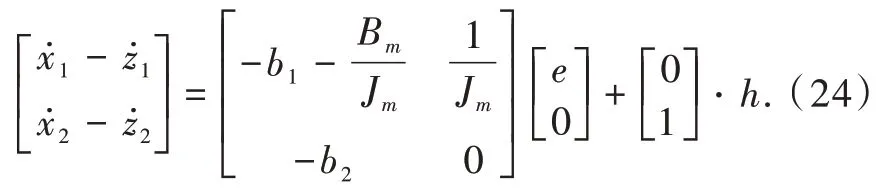
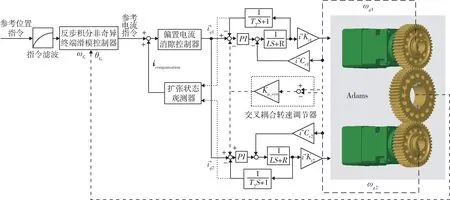
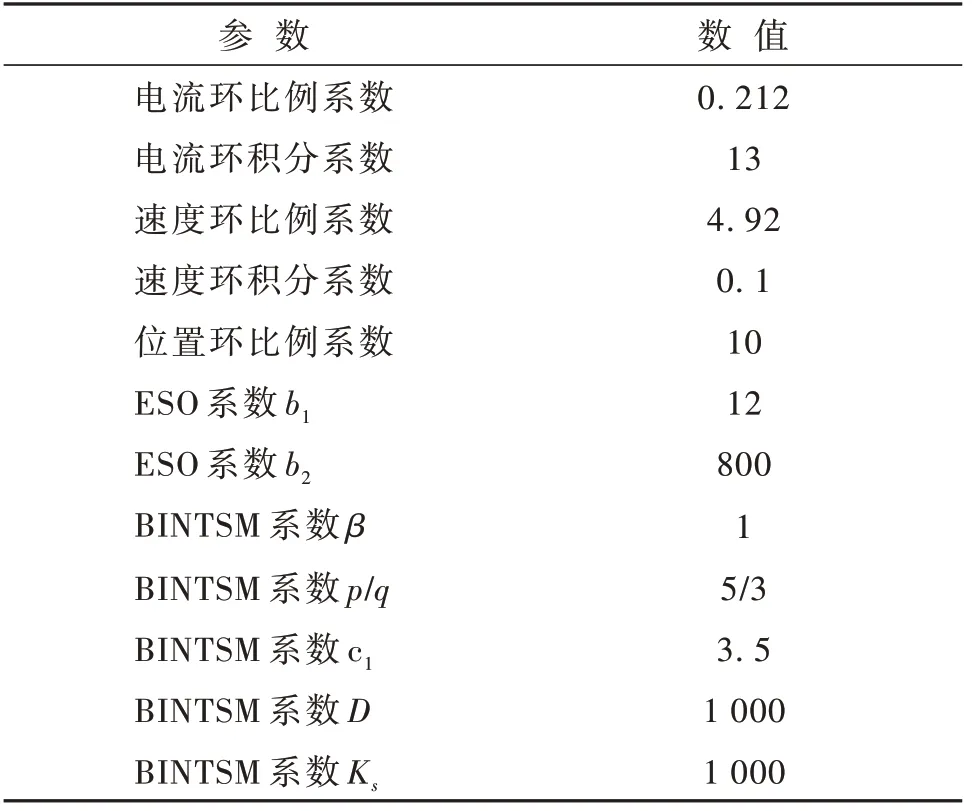
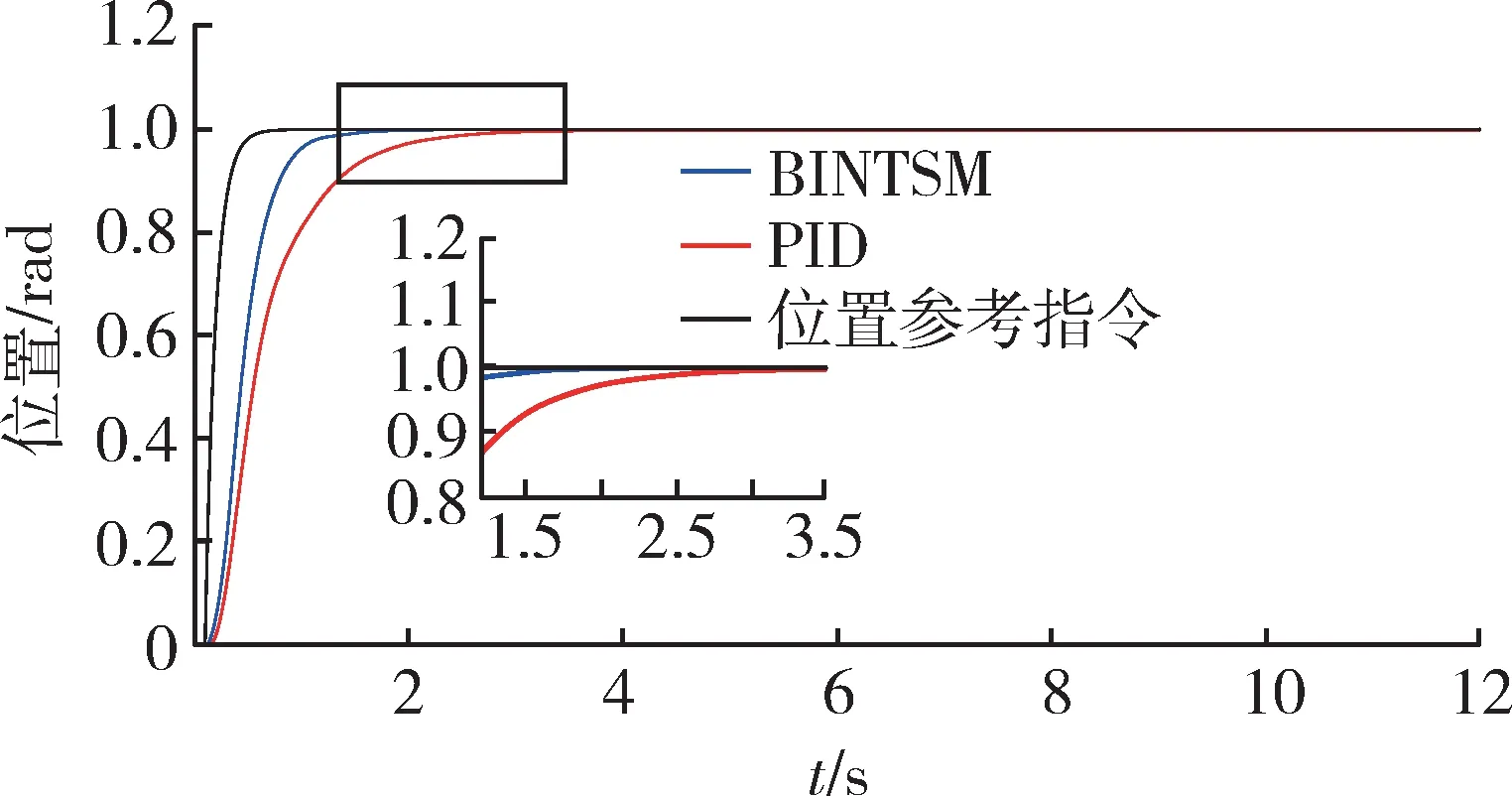
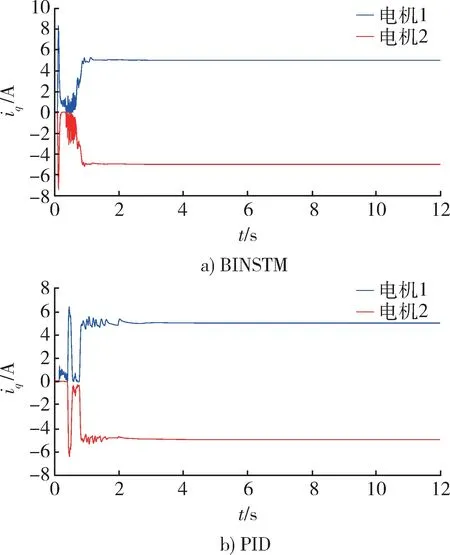
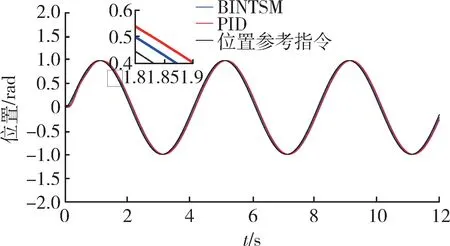
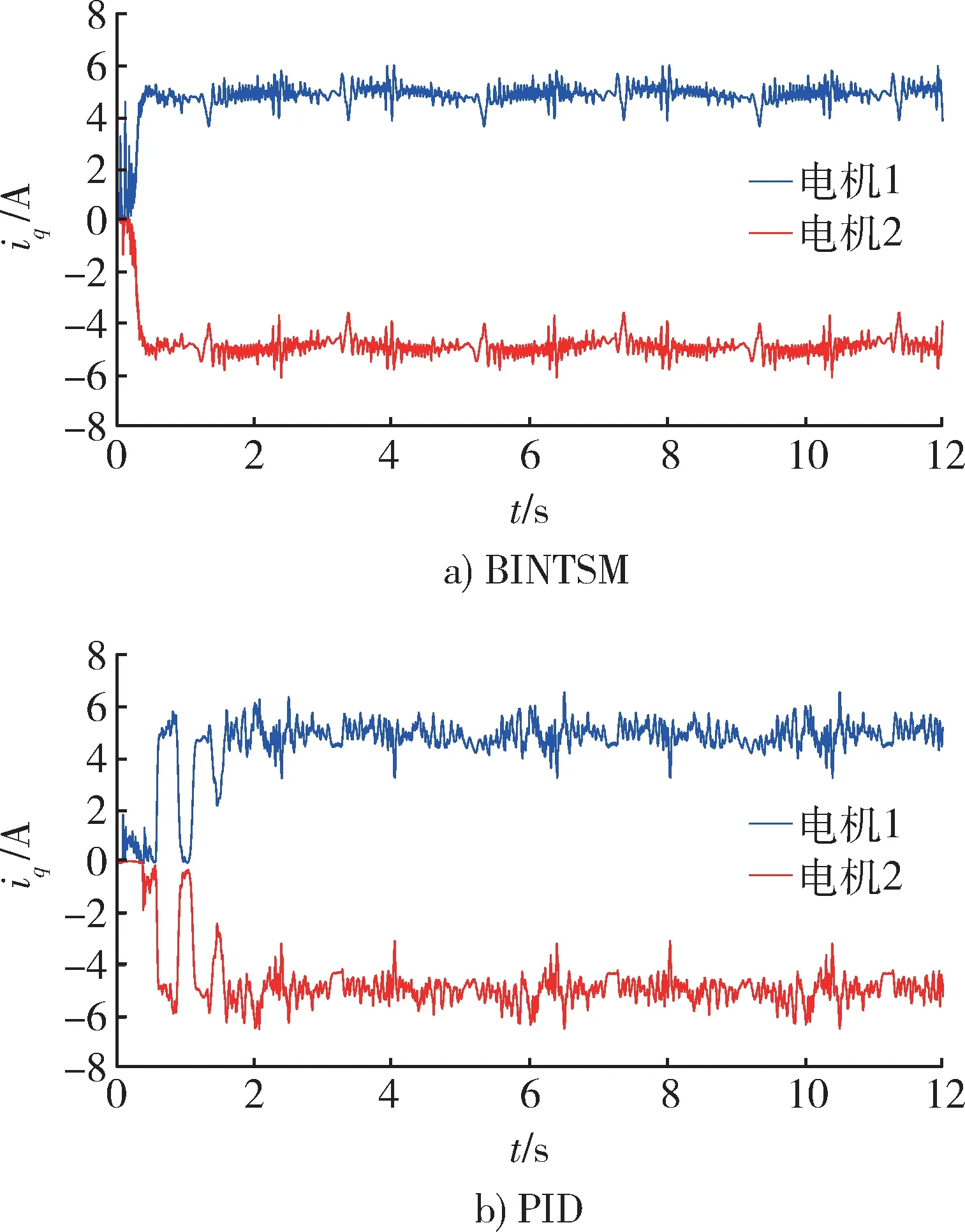
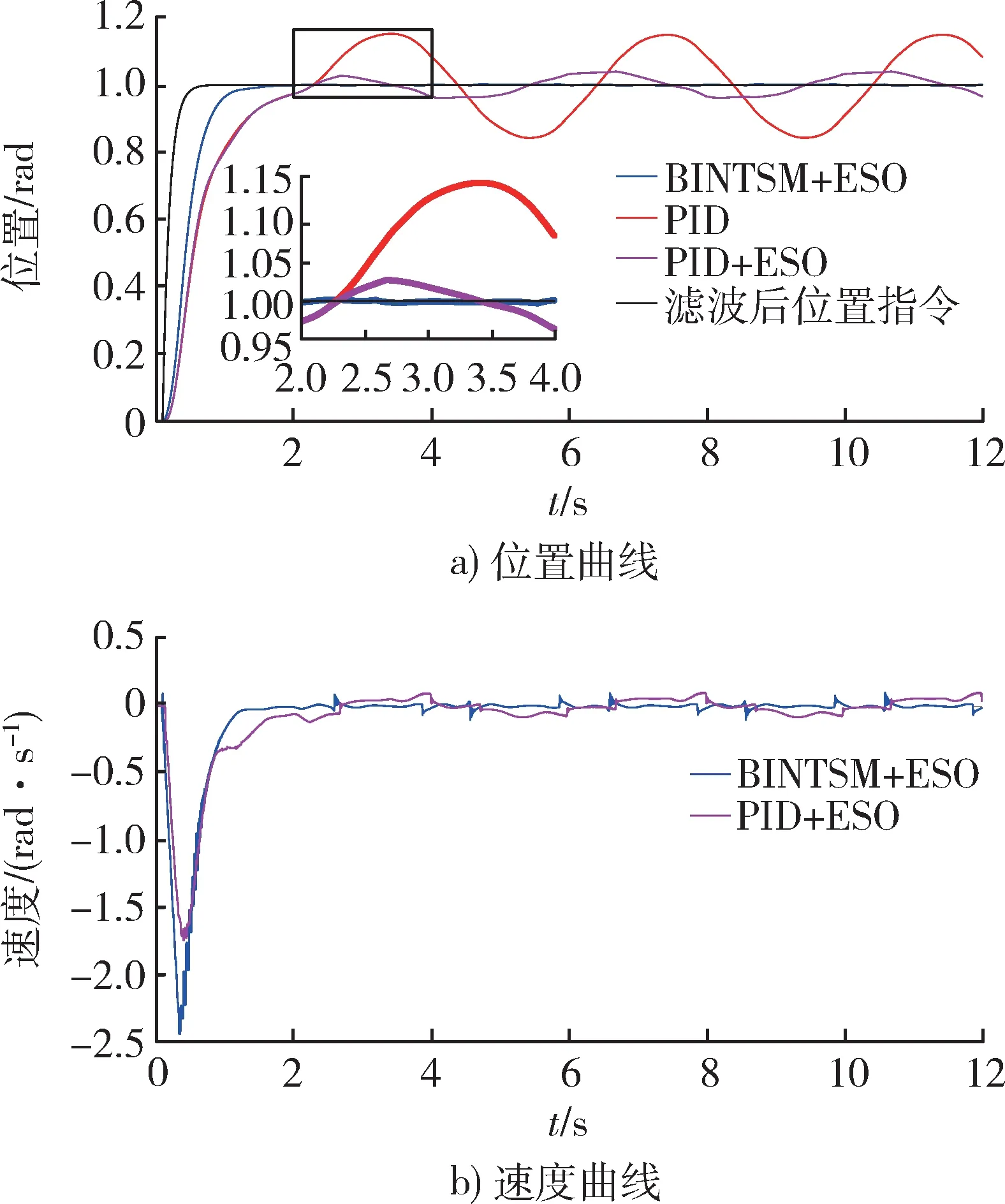
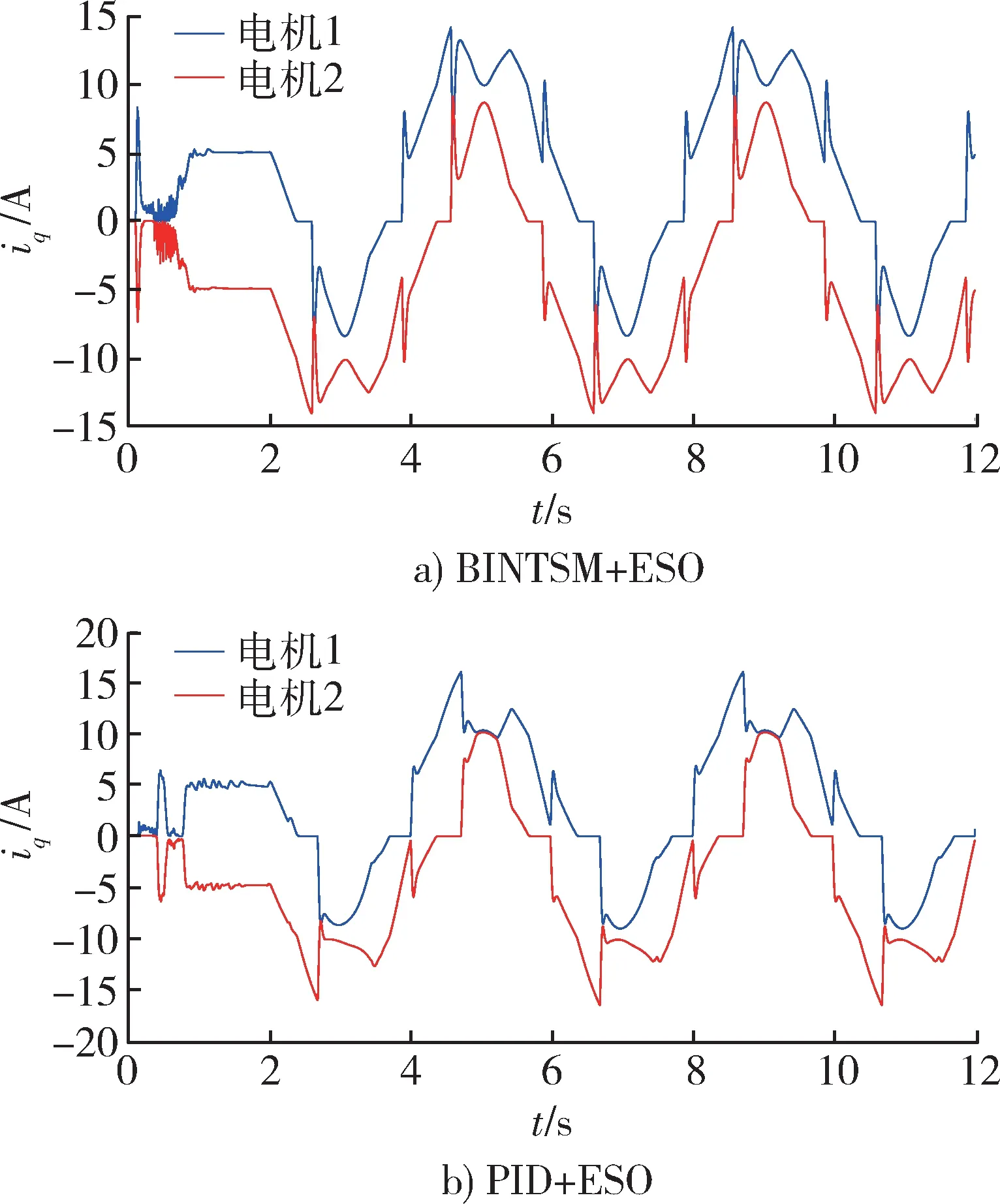
由于p,q均為奇數且q 可知反步法所設計第2步Lyapunov函數V2穩定性成立,故積分非奇異終端滑模面將在有限時間內收斂至0,此時狀態變量z2也將保持為0狀態,則第1步Lyapunov函數V?1≤0成立,狀態變量z1將在有限時間內趨于0狀態,系統實際位置到達指令位置。根據式(12)中的控制器輸出表達式,符號函數sgn()的不連續性將使控制量存在高頻抖動部分,可能會激發系統的高頻特性從而影響系統的穩定,故本文在算法中針對符號函數做如下處理,選擇飽和函數sat()來取代符號函數: 這樣將使控制量連續變化,削弱其高頻抖動部分;針對在控制率中對參考位置指令求一階導數甚至二階導數的計算,為了避免如階躍信號求導后引起控制量過大的問題,本文采用指令濾波的方式對位置參考信號進行了平滑處理。 由于雙電機同步消隙伺服系統中存在著各種擾動力矩,如摩擦力矩、沖擊干擾力矩等,本文為了有效抑制這些擾動因素采用了擴張狀態觀測器(ex?tended state observer,ESO)對 這 些 擾 動 進 行 補償[16-17]。擴張狀態觀測器能將系統的各種擾動總和進行處理,無需依賴系統的精確模型,具有很強的實用性。根據式(7)且考慮到系統結構參數的變化,可將大齒輪及負載動力學方程重寫為 令x1=ωG,則式(21)可重寫為 式中:h為總擾動的變化率;現可設計線性擴張狀態觀測器(liner ESO,LESO)為 則根據式(22)與式(23)可得觀測誤差矩陣為 式中:λ為誤差矩陣特征值;I2為二階單位矩陣;ωf為設計觀測器的帶寬。 解式(25)可得 為了避免噪聲的影響,觀測器帶寬ωf不宜設計過大,且考慮到雙電機同步消隙伺服系統中的齒隙已被變偏置力矩所補償,則觀測器輸入可表示為 觀測器輸出反饋至系統電流環的補償值為 根據式(5)中所示的齒隙數學模型,可知在運行過程中齒隙間傳遞力矩大小是會隨著齒隙變化而變化。如何更精確地對齒隙模型進行仿真且考慮到齒隙變化的動態過程,本文提出了基于Matlab/Simulink與Adams的聯合仿真方式,即在Simulink中運行控制算法與邏輯,在Adams中進行動力學的仿真。在三維建模軟件中創建好模型后導入至Ad?ams,在Adams中對齒輪結構添加接觸力約束,以物體嵌入深度與速度作為接觸力大小計算的依據,故在Adams中對齒輪傳動機構的仿真更符合實際工況。建立好的新型雙電機同步消隙伺服系統控制框圖如圖4所示。 圖4 新型雙電機同步消隙伺服系統控制框圖Fig.4 Control block diagram of the new dual-motor synchronous anti-backlash servo system 仿真所用表貼式永磁同步電機、齒輪傳動結構參數如表1所示。 設定仿真對比實驗為PID型常規雙電機同步消隙伺服系統、PID+ESO型擾動補償雙電機同步消隙伺服系統和BINTSM+ESO型新型雙電機同步消隙伺服系統。將分別對各方案的系統響應能力及抗擾動能力進行仿真實驗分析,對于各方案中共有的偏置電流消隙控制器和交叉耦合轉速調節器,其參數設置如下:偏置電流幅值為5 A,參考電流為0;交叉耦合轉速調節器參數Kp_syn為2。電指令值大小為7.5 A時開始衰減,直至10 A時變流環濾波系數T1,2為0.01,電流參考指令限幅值為30 A,各方案控制器參數設計規則如表2所示。 表2 控制器設計參數Table 2 Controller design parameters 現給定系統空載條件下0.4 s到達1 rad的階躍位置指令信號,得到各方案下系統狀態響應曲線如圖5,6所示。 圖5 空載階躍位置指令響應曲線Fig.5 Response of the step position command with no load 從以上的階躍位置信號響應圖可以看出,在空載條件下,以反步積分非奇異終端滑模(BINTSM)控制器為核心的新型雙電機同步消隙伺服系統能得到更快的響應速度,比常規PID型雙電機同步消隙伺服系統提高約2 s的到位時間;從電流信號的變化也可看出,BINTSM控制方法能得到更快的力矩響應,到達穩態時2種方式下兩側電機電流值大小均為5 A,符合消隙控制器的設計要求。 圖6 空載階躍位置指令電流響應曲線Fig.6 Current response of the step position command with no load 現再給定空載條件下周期4 s幅值為1 rad的正弦位置指令信號,得到的系統狀態響應如圖7,8所示。 從圖7可以看出,BINTSM控制方法具有更快的跟蹤速率,且位置曲線變化平滑,不受齒隙的影響。 圖7 空載正弦位置指令響應曲線Fig.7 Response of the sinusoidal position command with no load 在保持同樣的階躍位置指令輸入后,在2 s時給系統施加周期4 s幅值為1 000 N·m的擾動力矩,可得到系統的響應曲線如圖9,10所示。 圖8 空載正弦位置指令電流響應曲線Fig.8 Cur r ent response of the sinusoidal position command with no load 圖9 正弦擾動力矩作用下位置速度響應曲線Fig.9 Position and velocity response curve under sinusoidal disturbance torque 從周期擾動力矩加載實驗可以看出,PID算法位置波動范圍為0.84~1.15 rad,PID+ESO算法位置波動范圍為0.96~1.03 rad,BINTSM+ESO算法位置波動范圍為0.997~1.002 rad。從速度變化曲線可看出,在施加周期擾動后,BINTSM+ESO算法速度變化范圍始終在零速較小區間范圍內變化,而PID+ESO算法速度曲線與零速有較大的偏差值。從以上加載仿真實驗電流曲線也可看出,本文所設計的BINTSM+ESO算法電流響應較快,且與其他控制算法相比,電流變化范圍一致,未出現滑模控制常見的抖動情況。 圖10 正弦擾動力矩作用下電流響應曲線Fig.10 Current response curve under sinusoidal disturbance torque 本文在反步控制理論的基礎上,設計了一種雙閉環結構的新型雙電機同步消隙伺服系統控制方案,在控制器設計過程中引入了積分非奇異終端滑模面,并利用擴張狀態觀測器對系統未建模動態及擾動進行補償,仿真實驗結果證明: (1)采用反步積分非奇異終端滑模控制理論對雙電機同步消隙伺服系統進行設計,能簡化系統的控制結構,并提高系統的響應能力;積分非奇異終端滑模面的引入能減小滑模控制常見的抖動問題,采用指令濾波的方式避免了控制器設計過程中求導過程導致的輸出控制量過大。 (2)利用擴張狀態觀測器對系統總擾動進行補償,增強了雙電機同步消隙伺服系統的魯棒能力,且相較于PID+ESO的擾動補償方案,本文提出的BINSTM+ESO的控制策略有明顯的優越性。
2.3 基于擴張狀態觀測器(ESO)的擾動補償



3 系統仿真實驗
3.1 系統仿真模型建立
3.2 空載階躍信號仿真實驗
3.3 空載正弦信號仿真實驗
3.4 正弦干擾力矩加載仿真實驗
4 結論
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56