淺談無人機班組在輸電線路運檢中工作地點的選擇
2022-05-18 06:39:46賴勇耀
江西電力 2022年4期
賴勇耀,劉 暉
(國網贛州供電公司,江西 贛州 341000)
0 引言
近年來,國家電網有限公司全面推廣直升機、無人機和人工協(xié)同的輸電線路立體巡檢新模式,輸電線路無人機巡檢得到快速發(fā)展和應用[1]。多旋翼無人機具有體積小、成本低、操作簡單、起降方便等優(yōu)勢,應用于220 kV 及以下輸電線路巡檢具有很大優(yōu)勢,并可深入班組規(guī)模應用,隨著續(xù)航能力的不斷提升,具有廣闊應用前景[2]。無人機巡視相較于傳統(tǒng)人工巡視,巡視效率和質量都有巨大的提升。根據(jù)現(xiàn)場對同一路相同桿段每小時工作時間進行對比,傳統(tǒng)人工巡視只能完成3~4 基桿塔的到桿到位巡視,而采用無人機巡視可以完成15~20 個通道巡視。由此可見無人機在輸電線路運檢中極大地提升了巡視效率[3]。
但是使用無人機巡視單個飛行架次通常只能實現(xiàn)約3.5 km 的通道巡視或者約2 km 的樹障巡視,然后需要轉場到下一個工作地點繼續(xù)執(zhí)行巡視任務。尤其是在山區(qū)進行轉場,由于道路情況復雜,轉場需要花費大量時間。如果工作地點選擇不當,轉場時間將大大增加,無人機巡視的效率也會因此大打折扣[4]。
為有效解決這個問題,國網贛州供電公司輸電管理中心運維一班(以下統(tǒng)稱無人機班)結合以往的無人機飛行經驗,通過多種軟件的輔助,總結出一套切實可行的工作地點及轉場路徑的選擇方法,大大縮短了無人機巡視的轉場時間。
1 導航地圖
無人機巡視的工作地點一般在電子地圖軟件中提前選定,贛州公司無人機班采用奧維互動地圖與高德地圖(百度地圖)相結合的方法進行工作地點的選定。奧維互動地圖是集成Google 地圖、衛(wèi)星圖、地形圖、位置分享、指南針等功能與一體的電子地圖軟件[5](如圖1)。在奧維互動地圖中無人機班主要使用谷歌衛(wèi)星混合圖,其特點是能查看各個地點的地形,找到高德地圖(百度地圖)中沒有收錄的小路、山路的特殊路徑,這些特殊的路徑通常是轉場的捷徑,可以極大縮短轉場時間;奧維互動地圖還可以在生成的桿塔標簽之間進行測距,方便無人機巡視的任務規(guī)劃[6]。高德地圖(百度地圖)是可以實現(xiàn)在線導航、實時路況的等功能的電子地圖軟件(如圖2),其特點是能實時更新路況、智能導航,許多在奧維互動地圖中找不到的新修的道路可以第一時間在地圖上更新,在城區(qū)工作地點之間進行轉場時尤為實用[7]。
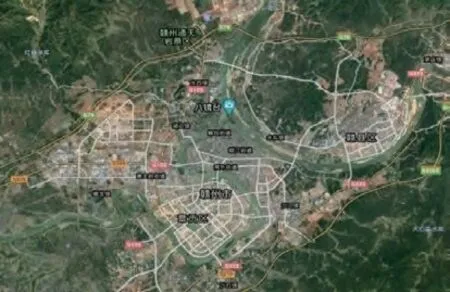
圖1 奧維互動地圖

圖2 高德地圖
無人機班的巡視工作地點通常覆蓋城區(qū)與山區(qū),這兩款電子地圖在Windows、Android 以及IOS 終端都可以進行安裝使用,在實際工作中互為補充,從而選擇最優(yōu)工作地點以及轉場路徑,可以大大縮短轉場時間。
2 選擇工作地點
無人機班在工作前會先將需要進行巡視的線路桿塔坐標信息導入奧維互動地圖中,在奧維互動地圖中可以生成直觀的標簽信息,方便對工作地點進行選擇。無人機巡視單個飛行架次可以實現(xiàn)約3.5 km 的通道巡視或者約2 km 的樹障巡視,然后前往下一個工作地點接續(xù)上一個地點的巡視桿塔進行通道巡視或者樹障巡視。以樹障巡視為例,無人機班通常先在奧維互動地圖中測量出需要巡視線路約2 km 的飛行桿段,以規(guī)劃桿段末端為第一個工作地點(如圖3),車輛到達此地點后就可以進行無人機起降,完成約2 km 的樹障巡視任務。第二個工作地點則是以第一個工作地點的桿段末端為起點,在奧維互動地圖中測量出約2 km 的飛行桿段,以此次規(guī)劃的桿段末端做為第二個工作地點(如圖4),以此類推。

圖3 第一工作地點的選擇
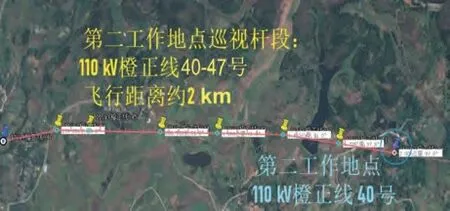
圖4 第二工作地點的選擇
2.1 城區(qū)工作地點的選擇
城區(qū)工作地點之間一般都有路況較好的公路,因此在奧維互動地圖中選擇好工作地點后可以直接人工規(guī)劃轉場路徑,但是部分新修建的道路奧維互動地圖無法做到實時更新。另外一種方法是在奧維互動地圖中選擇好工作地點后使用高德地圖(百度地圖)進行導航,高德地圖(百度地圖)將智能規(guī)劃時間最短的路徑,根據(jù)導航引導實現(xiàn)兩個工作地點之間的快速轉場。
2.2 山區(qū)工作地點的選擇
山區(qū)工作地點之間一般路況較差,而且部分地區(qū)沒有網絡信號無法使用高德地圖(百度地圖)進行在線導航,因此主要使用奧維互動地圖進行工作地點及轉場路徑的選擇。由于城區(qū)路況較好可以實現(xiàn)約3.5 km 的通道巡視或者約2 km 的樹障巡視,但是如果在山區(qū)工作機械套用這個方法,可能出現(xiàn)規(guī)劃的工作地點在大山里車輛無法到達或者前往規(guī)劃的工作地點的路況非常差,增加轉場時間的情況。因此山區(qū)工作地點需要靈活變通。在規(guī)劃飛行桿段時,不一定要固定3.5 km 的通道巡視或者2 km 的樹障巡視桿段,而需要根據(jù)飛行桿段末端也就是擬定的工作地點靈活調整飛行距離(由于無人機電池容量固定盡量不要延長飛行距離)。如果發(fā)現(xiàn)下一個規(guī)劃的工作地點車輛無法到達或者路況非常差的地方,可以適當減少飛行距離,以保證方便車輛進行轉場。
下面以某次樹障巡視任務為例進行說明。如圖5,如果機械套用樹障巡視2 km 的飛行距離,那么此次工作地點將會定在220 kV雷車Ⅱ線38號桿。但是根據(jù)奧維互動地圖可知,220 kV 雷車Ⅱ線38 號桿在山里,車輛無法直接到達;而且無人機飛行到該桿塔距離較遠,無人機到達桿塔時可能沒有圖傳信號,無法啟動樹障巡視任務。所以將該桿塔作為工作地點不是最佳選擇。

圖5 錯誤工作地點
此時我們應該適當縮短飛行距離,如圖6,將此次巡視桿段定為220 kV 雷車Ⅱ線33-37號桿,飛行距離約為1.65 km,這樣工作地點將會定在220 kV 雷車Ⅱ線37 號桿,車輛可以到達桿塔附近,無人機啟動樹障巡視任務時將有良好的圖傳信號,能確保啟動樹障巡視任務。不僅減少了一點飛行距離,而且可以提高無人機班組的巡視效率。

圖6 正確工作地點
3 結語
輸電線路無人機巡檢已經得到廣泛研究和應用。基于人機協(xié)同巡檢的輸電智能運檢模式,實現(xiàn)運檢數(shù)據(jù)的精準分析和可控預警,為運檢管理決策提供有力支撐,實現(xiàn)生產指揮及決策的高度智能化和集約化,大幅提升設備狀態(tài)管控能力和班組管理穿透力。贛州公司對無人班組在輸電線路巡視中工作地點的選擇問題進行了深入的調查研究,總結出了一套高效科學的方法,這套方法的總體原則是:
1)工作地點盡量選擇在車輛可以通行的地方;
2)選擇路況較為理想、消耗時間較短的轉場路徑。把握這兩個工作地點及轉場路徑選擇的大方向,再根據(jù)實際巡視情況靈活變通,就能進一步提高無人機班組的巡視效率。