淺海多節點環境參數測量數據融合方法研究
2022-05-17 05:38:56謝李祥邢傳璽張東玉吳耀文
聲學技術 2022年2期
謝李祥,邢傳璽,張東玉,吳耀文
(云南民族大學電氣信息工程學院,云南昆明 650500)
0 引 言
由于海洋環境信息源的不斷增加和及時準確獲取海洋信息的重要性,使得各種數據融合技術不斷被應用于海洋監測領域。在目前國內外的海洋環境監測設備中,各類不同的傳感器成為監測海洋的必備節點。但由于傳感器本身的測量精度、內部結構和高斯噪聲等[1]使得獲取的海洋參數存在一定的偏差,同時,監測地點的外部環境干擾也是降低數據精確度的原因之一。為了更加精準地獲取監測數據,降低傳感器測量誤差,通常通過改進傳感器硬件結構,減少采集誤差;或直接通過對采集的原始數據進行去噪處理,降低噪聲對采集數據的影響[1]。目前在上述方法的基礎上,使用多傳感器融合技術,將多傳感器獲取的數據進行濾波融合,可以得到更加穩定可靠的數據。
獲取準確的水聲信號是進行聲速剖面反演、目標檢測等[2]的首要問題,并且在進行水聲信號獲取時,需要對實驗區域的水質環境有一個全面的認識。因此,本文基于及時獲取淺海環境參數和水聲信號采集運用的背景,引入具有廣覆蓋、低成本優點的窄帶物聯網(Narrow Band Intcrnct of Things,NB-IoT)技術,并使用自適應加權融合技術和模糊綜合評價方法對采集數據進行融合。獲取到監測平臺通過NB-IoT無線傳輸模塊回傳的原始數據后,采用模糊理論中的相關性函數剔除異常數據,提高數據精度;隨后將剔除異常數據的數據集進行自適應加權融合,為下一步融合提供數據輸入;最后使用模糊綜合評價方法進行二級融合。
相比于傳統的自適應加權融合算法和算術平均算法,本文額外考慮了實際運用中水質采集偏差的影響,進行異常數據剔除,大大提高了第一級數據融合的精度,并最終以概率形式直觀地展示出水質評價結果。為海洋保護、治理與開發提供精確的數據和科學決策的依據。
1 淺海水質參數獲取平臺設計
本文設計基于的是NB-IoT的淺海環境參數獲取平臺采集所測海域的基本環境信息。該平臺將多傳感器搭載在移動浮標上[3],構成數據采集終端,數據采集終端通過 STM32F407驅動多種水文傳感器獲取水質參數,并將其存儲于自身的存儲介質中,防止數據丟失,同時使用NB-IoT無線傳輸模塊,及時地將環境參數上傳到遠程控制中心[4]。在遠程控制中心可以實時觀測獲取各項環境參數,并對控制中心保存的環境參數進行數據融合處理,為科學決策提供數據。單節點數據采集終端硬件結構如圖1所示。
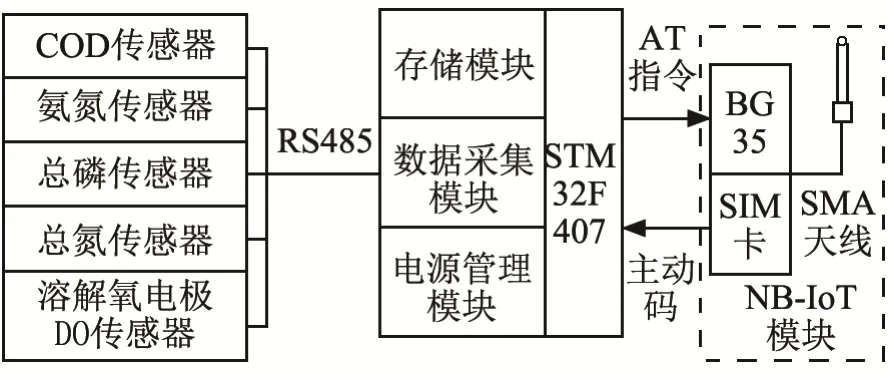
圖1 單節點采集終端硬件結構Fig.1 Hardware structure at the single node acquisition terminal
主控芯片采用具有高性能、低功耗、實時性特征的STM32F407芯片[5],該芯片具有6個串口,通過搭載SP3485芯片實現USART轉485接口,實現與各數據傳感器的通信。其主要負責驅動各傳感器獲取環境參數,并將其存儲,同時,使用NB-IoT無線傳輸模塊上傳環境參數與節點地址。電源管理模塊主要負責給整個系統供電,采用高能密度電池組,完成長時間采集;并使用太陽能板對電池組進行充電[6],實現系統的低功耗。
數據采集模塊主要負責獲取所測區域的水質環境參數。通常獲取的主要水質參數包括:溫度、PH 值、濁度、溶解氧(Dissolvcd Oxygcn, DO)和電導率(Elcctrical Conductancc, EC);營養鹽:氨氮、總磷和總氮[7];重金屬離子(銅、鋅等)和化學需氧量(Chcmical Oxygcn Dcmand, COD)等。本文主要針對溶解氧、氨氮、總磷、總氮和化學需氧量五種環境參數進行采集[8]。其中溶解氧通過 DOLE6211溶解氧傳感器連接DO6400溶解氧變送器獲取,其傳感器測量分辨率為 0.01 mg·L-1,測量誤差小于±0.1 mg·L-1;氨氮、總磷和總氮采用N-1000系列高度集成的營養鹽分析儀獲取,該傳感器可連續批量處理,測量精密度小于 3%;化學需氧量通過TK-C100型光學COD在線檢測傳感器獲取,該傳感器量程為 0.1~5 000 mg·L-1,分辨率為0.1 mg·L-1。
本文所采用的各水質傳感器均采用 RS485通信方式。RS485采用數字通信方式,具有抗干擾能力強和傳輸距離遠等優點[9],避免了長距離傳輸模擬信號導致數據誤差大,并且RS485通信采用一主多從的網絡連接方式,即STM32F407為主機,各水質傳感器為從機。同時RS485采用同名端連接方式,即各傳感器的通信線A+與主控芯片RS485串口的A+相連接,各傳感器的通信線B-與主控芯片RS485串口的B-相連接[10],具體連接示意圖如圖2所示。
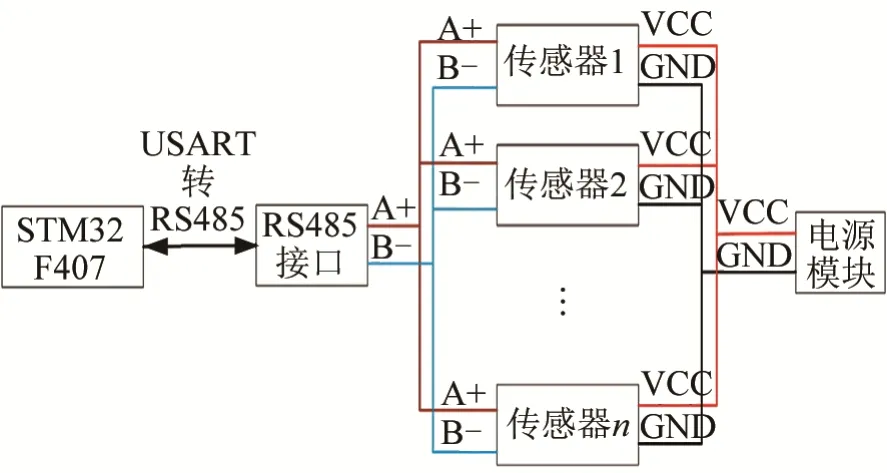
圖2 水質監測系統的連接圖Fig.2 Connection diagram of the water quality monitoring system
各水質參數傳感器均使用標準的Modbus-RTU通信協議。從Modbus-RTU通信協議的數據幀格式中可知標記從機地址的地址碼占用一個字節,故在一個RS485的通信網絡中,從機的地址為1~255,即可最多掛載255個從機,滿足系統開發需求[10]。通過Modbus-RTU通信協議數據幀格式中的功能碼依次對水質傳感器進行讀和寫操作,即可獲取各項水質參數。
無線傳輸模塊主要負責將各水質傳感器獲取的數據發送到遠程控制中心。無線傳輸模塊采用與短距離通信技術 Zigbcc、LoRa、藍牙、Z-wavc等相比較有著傳輸距離遠、低功耗、成本低等優點的NB-IoT模塊[11-12]。NB-IoT模塊主要由BC35模塊、復位電路、SIM卡槽和SMA天線組成。并且該模塊通過USART3與主控芯片相連接,主控芯片通過發送AT指令控制NB-IoT無線傳輸模塊,進行數據上傳,完成淺海環境水質參數獲取。
通過前期驗證性實現,該參數獲取平臺基本功能已完成,可實現淺海水質參數的采集、存儲及發送,滿足環境參數采集要求。
2 數據融合
數據融合也稱為多傳感器數據融合,是將多傳感器獲取的數據進行綜合分析處理,實現對監測環境科學統一的評價。即通過多種環境參數傳感器獲取到水質信息后,采用合理的去噪算法對其進行合理分析與處理,并從多方面把各項水質環境因子按照某種優化模型結合起來,產生對水質等級評價的一致性判定,并利用多傳感器的聯合操作優勢來提高整個系統的有效性[13],減少使用單一傳感器的不確定性。多傳感器數據融合按照融合級別可劃分為:數據級融合、特征級融合和決策級融合三個等級[13]。同時,由于多傳感器融合算法的特點和適用范圍不同,因此在實際運用中通常將兩種或兩種以上的算法集合在一起進行數據融合,按照集合方式可分為:串聯型數據融合、并聯型數據融合和混聯型數據融合[14]。根據水質環境監測的具體運用和獲取參數的方式,將水質環境監測的數據融合結構設計為:兩級并聯型數據融合,其融合過程如圖3所示。其中,每組傳感器均使用5個同類傳感器進行數據采集。
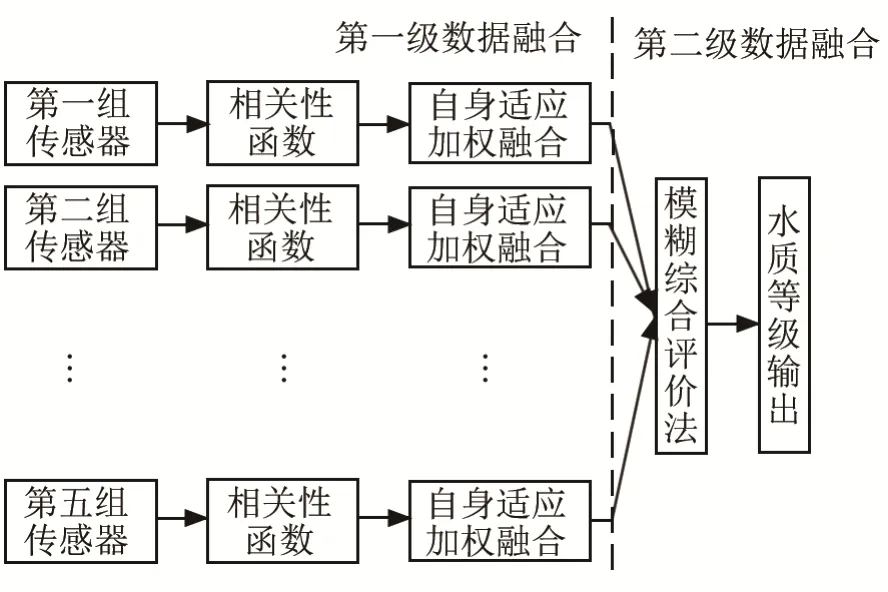
圖3 采集數據融合過程示意圖Fig.3 Schematic diagram of fusion process of acquisition data
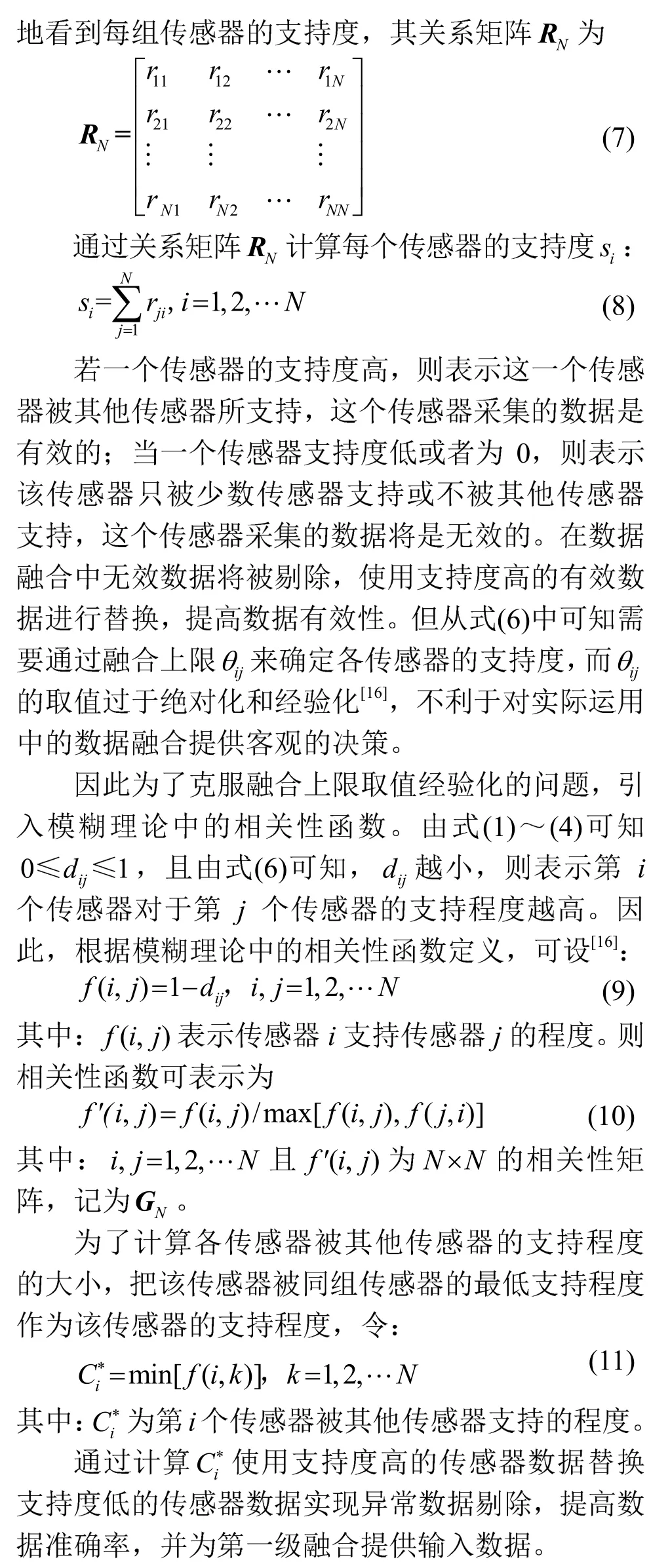
2.1 相關性函數

2.2 自適應加權融合算法
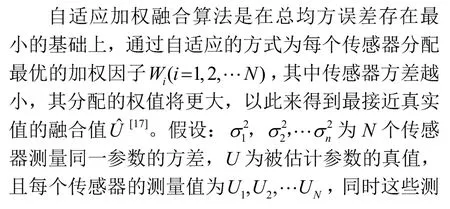
自適應加權融合算法的基本結構如圖4所示。

圖4 自適應加權融合算法結構Fig.4 Structural diagram of adaptive weighted fusion algorithm

2.3 模糊綜合評價方法
模糊綜合評價方法即使用模糊數學隸屬度的理論,將對受到多種因素影響事物或對象做出一個綜合的評價[19]。它能夠給出一個清晰的評價結果,其評價結果以概率形式展現,能夠很好地克服模糊性和難以量化的問題。其基本步驟是首先構建綜合評價指標,即根據某一標準確定評價等級;然后需要確定對應評價等級的影響因子,即在具體運用中采集到的數據集;在獲取到不同的數據集后,需要根據每類參數的重要程度確定權重向量;再通過合適的隸屬度函數建立模糊關系評價矩陣;最后將模糊關系矩陣與權重向量合成,輸出最終的評價結果[19],其流程如圖5所示。
圖5 模糊綜合評價方法流程Fig.5 Procedure of the fuzzy comprehensive evaluation method
2.3.1 構建綜合評價指標
評價指標即是評價者通過綜合多種影響因子,對某一事物做出一致性評價等級的集合。本文依據GB3838—2002《地表水環境質量標準》[20]將綜合評價指標劃分為T={Ⅰ類, Ⅱ類, Ⅲ類, Ⅳ類, Ⅴ類},其評價指標越大水質環境越差。
2.3.2 確定評價對象因素集
評價對象因素集即為影響評價指標的各因子的集合X={xi} ,i=1 ,2,…n,其中n表示評價對象因素集的個數,即綜合n個影響因子來確定最終的綜合評價等級。在本文中根據獲取到的水質環境參數,將評價對象因素集設置為X={x1,x2,x3,x4,x5},其中x1到x5分別表示水質環境參數獲取平臺采集的DO、氨氮、總磷、總氮和COD的數值。
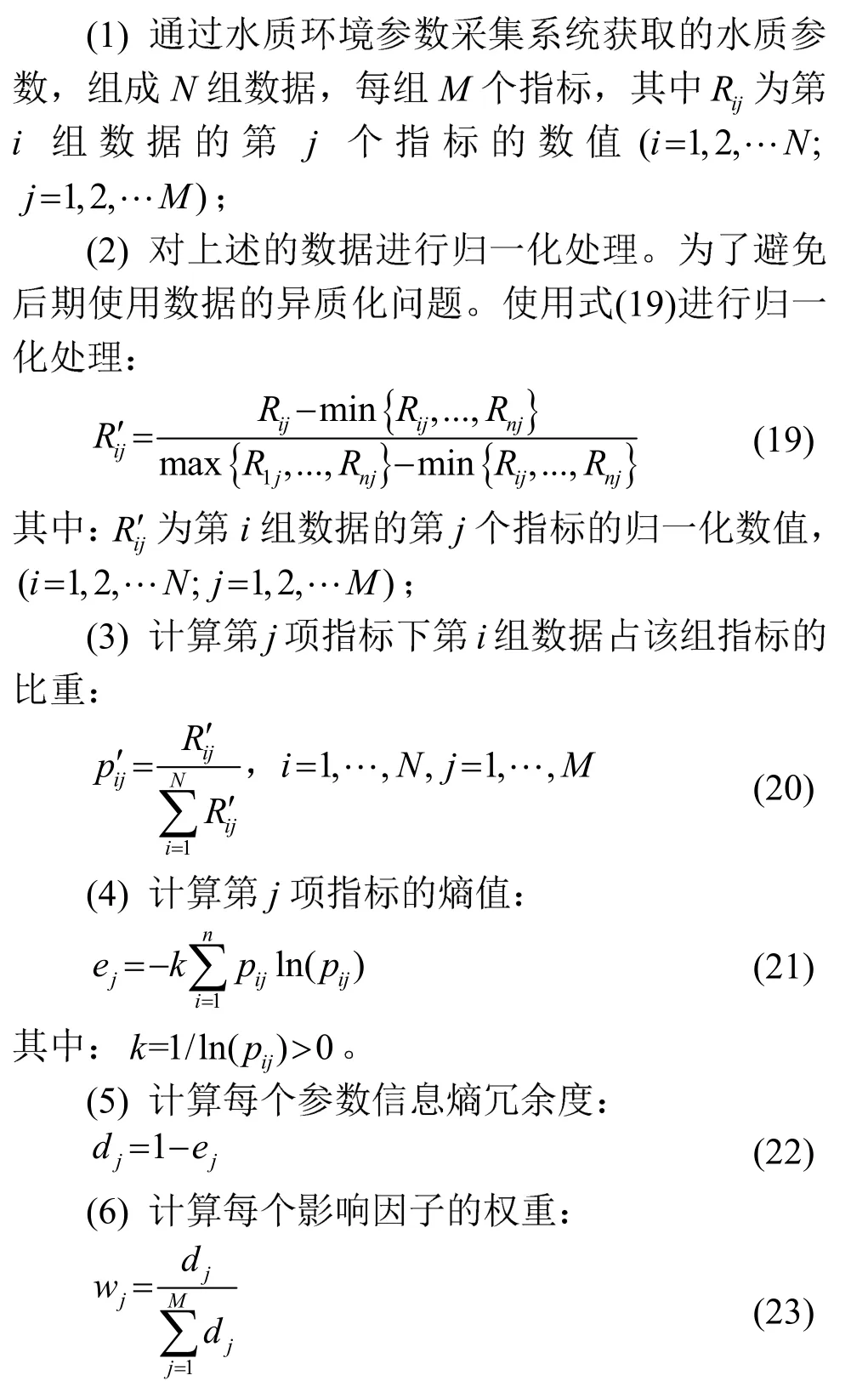
在本文中確定權值即是確定各影響因子(溶解氧、氨氮、總磷、總氮和化學需氧量)對于水質環境質量評價等級影響程度的強弱。在實際的運用中,權重的取值直接影響著最終評價結果的優劣,所以確定一個合理的權值向量十分重要。在實際運用中經常采用專家經驗法、層級分析法和熵值法進行權值的確定,但專家經驗法與層級分析法主觀因素較重,使得獲取的權值經驗化和片面化,使得評價結果具有隨機性。熵值法可以得到某個指標的離散程度。進而通過不同指標的離散程度來確定對于綜合評價指標的影響程度。在信息論中,通過計算熵值來判斷某一指標的無序程度,熵值越小,則無序程度越低,離散程度越大,對于綜合評價指標的影響程度也越大,故對應的權值越大[21]。熵值法通過評價因子的離散程度來確定各影響因子的權重,避免了專家經驗法與層級分析法的主觀性,提高了權重向量的準確性與客觀性,同時由于本文水質參數獲取平臺采集的數據均為離散型數據,滿足熵值法使用條件,因此本文采用熵值法確定權值向量W,具體步驟如下:
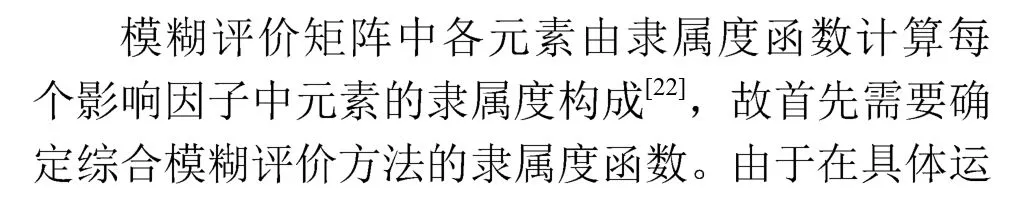
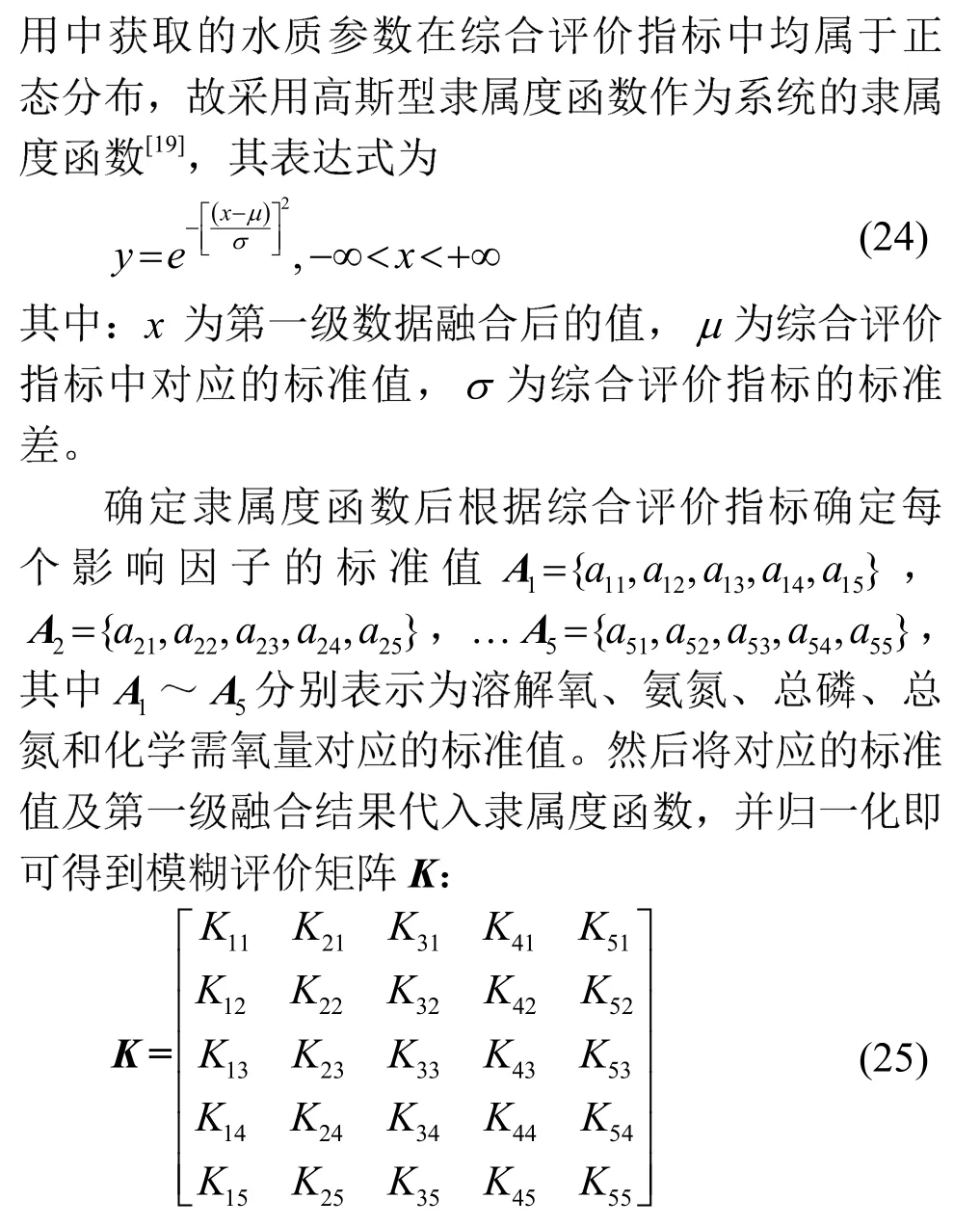
2.3.4 建立模糊評價矩陣
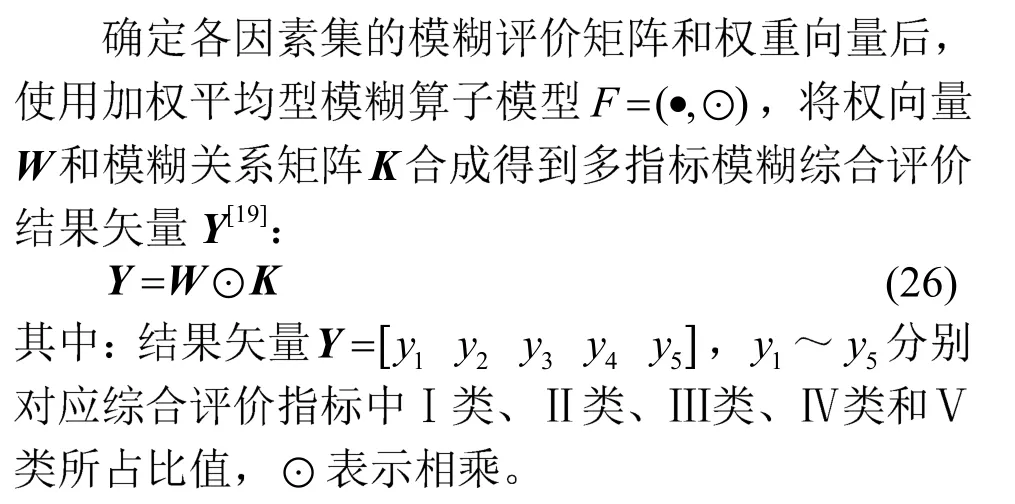
2.3.5 輸出多指標綜合評價
3 算法實現與環境判決方法
為了驗證本文方法的可行性與可靠性,將數據采集終端通過移動浮標放置于某湖泊中進行驗證性實驗,現場測試圖如圖6所示。
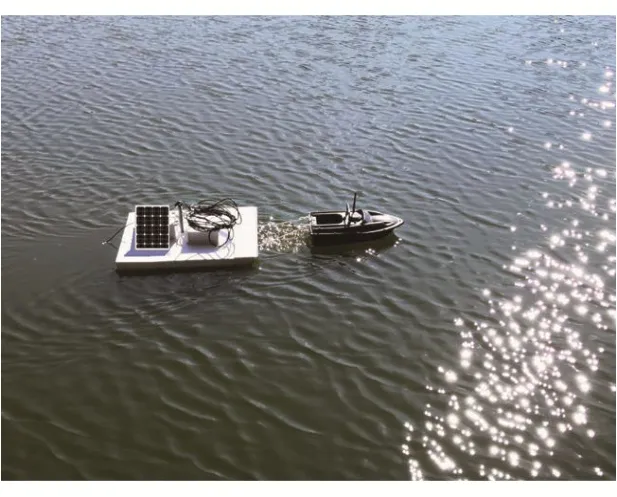
圖6 現場測試圖Fig.6 Picture of field test
水質傳感器放置于水下1 m處,每10 min采集一次,每次采集5組數據,每組數據包括5個同類水質傳感器獲取的數據,共采集 50次。最后將每次采集的數據通過NB-IoT無線傳輸模塊上傳到遠程控制中心,在遠程端使用LabVIEW軟件實現環境參數的實時觀測與數據存儲,采集完成后對存儲的數據進行融合,提高淺海環境觀測實時性,其遠程端可視化界面如圖7所示。同時,本文采集所需數據的時間僅為8.4 h,與文獻[23]相比有更短的采集周期,進一步提高了觀測實時性與融合實時性。
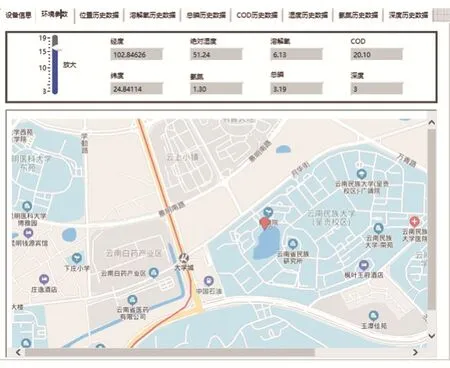
圖7 可視化界面Fig.7 Visual interface
數據融合具體步驟如下:
(1) 對每一組同類水質傳感器進行剔除異常數據操作和數據融合操作,即第一級數據融合,為下一級數據融合提供輸入。本文以營養鹽分析儀獲取的氨氮數據進行驗證與分析,其余數據處理方法均一致。
① 獲取到氨氮數據之后,先將5個傳感器數據的均值與方差計算出來,便于后續操作,具體數據如表1所示。
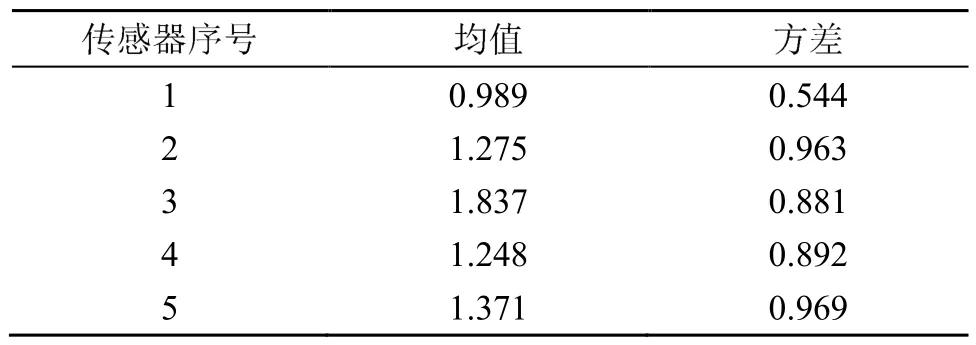
表1 各傳感器測量的氨氮數據均值與方差Table 1 Mean and variance of ammonia-nitrogen data measured by each sensor
將表1中的數據代入式(1)、(3)可得置信矩陣DN為
3.提高了民主管理程度,黨風廉政建設卓有成效。廠務公開的推行,使一號煤礦的黨建工作、企業文化、隊伍建設、內部管理得到加強,領導班子成員的大局意識和責任意識有所提升,多種形式加強領導干部民主評議工作,干部作風得到改進;加大公開選拔干部的力度,增強了職工的向心力和凝聚力,也促進了企業內部和諧氛圍的營造及各項工作的順利開展,民主管理的有效推行使得一號煤礦的企業黨風廉政建設卓有成效,干部職工上下齊心,干群關系融洽,以優良的品質、過硬的作風為一號煤礦的發展貢獻力量。
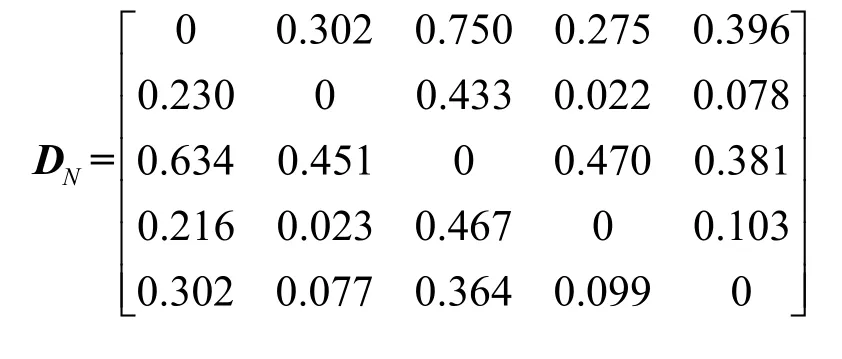
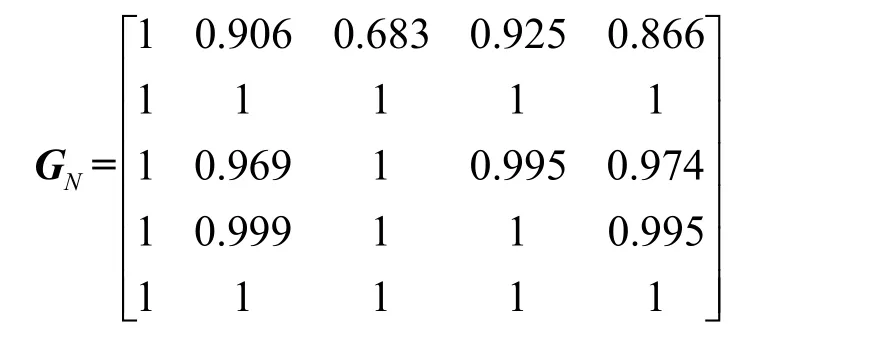
根據式(9)、(10)可得相關性矩陣GN為
② 使用剔除異常數據后的新數據進行自適應加權融合,首先通過式(17)計算出各組傳感器對應的權值W=[0.240 0.135 0.240 0.146 0.240],然后將權值代入式(13)(式中的Ui在此處為傳感器數據的均值)即可獲得第一級的數據融合值。
(2) 通過第一級的數據融合之后,5組傳感器分別輸出對應的第一級數據融合結果;然后將剔除異常數據的各組數,據根據熵值法確定5組傳感器對應的權值w=[0.160 0.238 0.192 0.236 0.174];
獲得第一級融合結果和各組傳感器對應權值后,根據GB3838—2002《地表水環境質量標準》[20]確定對應評價指標的標準值,并根據標準值計算出對應的標準差,結果如表2所示。
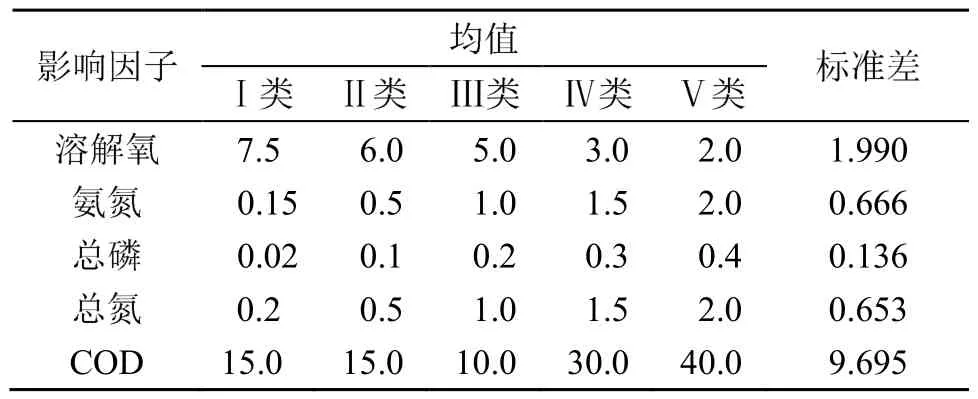
表2 影響因子均值及標準差Table 2 Standard values and standard deviations of impact factors
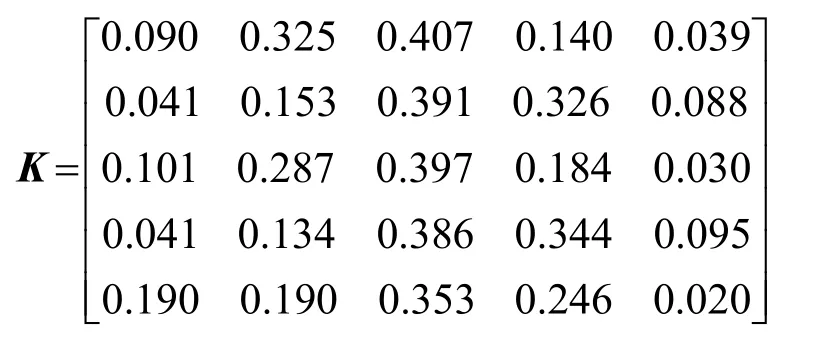
然后根據隸屬度函數式(24),并歸一化后得到模糊評價矩陣K:
最后將權值向量w和模糊評價矩陣K代入模糊算子模型F中,將得到最終的評價結果,如圖8所示。
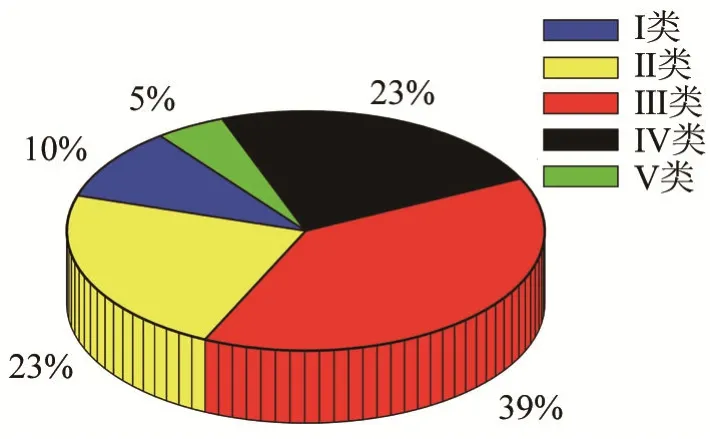
圖8 水質等級評價結果Fig.8 Result of water quality grade evaluation
從圖8中可以看出,39%的占比為水質等級Ⅲ類,是水產養殖區等漁業水域及游泳區,與實際情況相符,且由最終的評價結果為Ⅲ類,可得影響因子氨氮對應的標準值為 1.0,通過上述計算得到第一級數據融合結果,而使用未考慮實際運用中水質參數采集偏差的傳統自適應加權融合算法和算術平均算法得到的第一級數據融合結果分別為1.304和1.344,則對應的相對誤差分別為Y2、Y3:
其中:Y1為剔除異常數據后使用自適應加權融合算法的相對誤差。
從式(27)中可明確觀測到本文考慮實際采集偏差算法的相對誤差僅為 6.5%,滿足第一級融合要求,且明顯優于后兩種傳統融合算法。同時最終的評價結果相對于通過單一傳感器和人為觀測水質環境,更加準確直觀地提供了水質監測結果,為科學決策和環境治理提供了可靠有效的數據來源。
4 結 論
本文基于傳統水質監測設備觀測不及時、使用單一傳感器觀測水質片面及評價水質不合理的缺點,設計了一套基于NB-IoT組網的數據回傳水質監測平臺,并在遠程控制中心引入多傳感器數據融合算法,使得監測數據能夠及時上傳到遠程控制中心,避免了人工回收數據成本高和處理不及時的缺點。同時使用多傳感器數據融合算法,能有效克服使用單一傳感器觀測水質的局限性,并在具體運用過程中,使用模糊理論中相關性函數確定各傳感器支持程度,剔除異常數據,和使用熵值法確定權值向量,使得本文融合方法更加合理。最后經試驗證明:該水質監測設備能及時準確地反饋監測水域水質參數,多傳感器數據融合算法能合理簡潔地反映所測區域水質等級,滿足淺海環境水質監測需求。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
今日農業(2021年19期)2022-01-12 06:16:36
石油瀝青(2021年4期)2021-10-14 08:50:44
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
當代水產(2019年1期)2019-05-16 02:42:04
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
河南科技(2014年23期)2014-02-27 14:19:07
河南科技(2014年18期)2014-02-27 14:14:54