機床用基于加性分解PMSM的滑模控制*
2022-05-12 07:20:04劉慧博陳豪鑫
制造技術與機床 2022年5期
劉慧博 陳豪鑫
(內蒙古科技大學信息工程學院,內蒙古 包頭 014010)
永磁同步電機(PMSM)因為其高可靠性,高效率和高性能而常被用于各業中,像在陸地交通(如機床)、航海交通(如船舶推進)和軍事(如自行火炮)等領域已司空見慣。然而,PMSM是一個變量多、非線性、強耦合的系統[1],并且機床運行中會受到許多外部干擾,負載轉矩會不斷改變,讓PMSM控制變得尤為復雜。傳統V/F控制技術已沒法適應現代機床對轉速、轉矩持續穩定調控和抗干擾能力要求。隨后,出現了一種可以把交流電機類似簡化成直流電機的控制-磁場定向控制(field oriented control,FOC),因其擁有動態的高速響應、全速波動小及靈便控制等優點,現被廣泛應用于PMSM控制上。其控制調節通常包括轉速環和電流環,且都能根據相應指令實時跟蹤,對外部干擾具備較強的魯棒性。電流環內部電流控制回路直接影響驅動系統的性能,需要精確的跟蹤性能[2]。對此采用電流雙閉環進行跟蹤控制,該結果能很好地控制機床的運行狀態。對于轉速外環系統,會受到動態的變速和變載等不確定性外部干涉,要達到轉速持續調穩目的較為困難。為此,文獻[3]采用滑模轉速控制器替代傳統型的PI速度調節器,增強了系統的魯棒性,拓寬了系統的調速范圍,但抖振較大。文獻[4]設計了基于新型指數趨近律的滑模變結構速度控制器,仿真和實驗結果表明,該速度控制器的高頻抖振略微減弱,也有效地提高系統的靜態、動態特性與魯棒性。
加性分解(additive decomposition,AD)理論,是一種可以使復雜大系統分解為兩個簡易小系統的疊加,這樣就能很好地在簡易小系統內完成各自問題,進而實現復雜的原始系統控制。文獻[5]將該理論實現在風力機變槳控制器設計中,使原復雜的非線性系統,分解為2個簡單的控制問題。文獻[6]策略是將跟蹤子任務分配給主系統,將穩定子任務分配給輔助系統,因此主系統可以使用頻域或時域中的標準設計方法,而輔助系統就可以采用許多非線性穩定控制方法。光電跟蹤系統作為典型的伺服系統,已被證明可運用加性分解理論對其進行主、輔系統控制,進而完成對目標的高精度追蹤。而永磁同步電機控制系統也是一個典型的伺服系統,因此對其控制任務可分為:轉速環的穩定控制和電流環的跟蹤控制。
綜上所述,本文將基于加性分解理論對PMSM控制系統進行分解成主系統和輔系統,將電流矢量位置跟蹤控制和轉速環穩定控制對應在主、輔系統內完成。因為機床運行狀況一般是低速行駛和受負載擾動,經以往實驗經驗知道滑模控制抗干擾力優于PI控制(如文獻[3]),所以將采用速度滑模調節器。再對比傳統速度滑模控制方法,驗證了所設計的改進滑模控制方法能夠對PMSM進行更高效穩定控制。
1 基于加性分解的數學模型
機床伺服控制系統主要由PMSM、驅動電路、編碼器、平臺框架系統及電源組成。其機電系統動態模型可以表示為:

式中:Ja為 系統的轉動慣量;ζa為系統的阻尼系數;u(t)為 系統的控制輸出;fext表示外部干擾。因此,PMSM驅動控制系統的狀態方程可表示為


其中的 ζfext(t)可完全展開為:

將原系統與主系統相減得輔系統,即
最后,可看出用加性分解理論對系統進行分離后,可以將外部干擾穩速問題和跟蹤問題分開處理,進而實現高效控制。基于加性分解PMSM控制系統框圖如圖1所示。
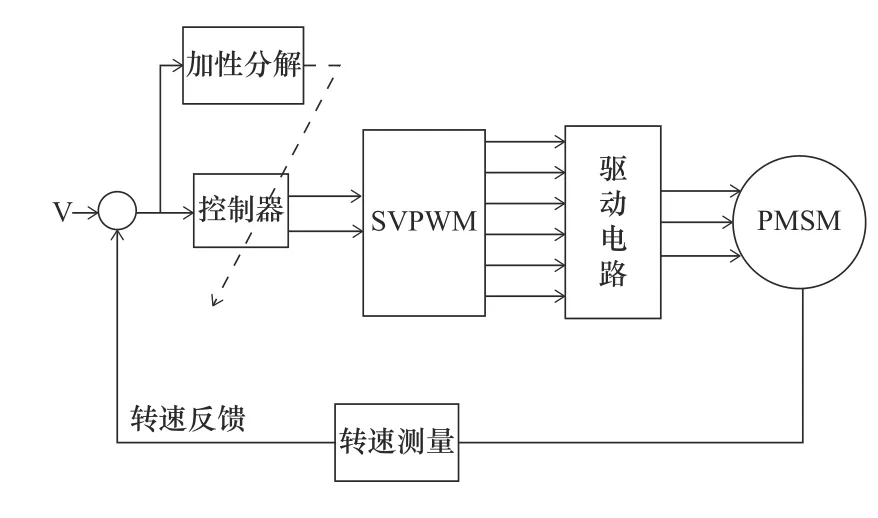
圖1 基于加性分解PMSM控制系統框圖
2 基于加性分解的控制策略
為了實現PMSM的穩速控制(steady speed control,SSC),從系統給定轉速出發,針對輔系統模型首先設計基于滑模的轉速調節器。主系統為了完成電流矢量精確控制,也就是電流跟蹤控制(current tracking control,CTC),設計采用雙閉環電流跟蹤控制器。經加性分解后的控制器框圖如圖2所示,其中r(t)是給定轉速信號,通過與轉速反饋閉環比較后,經過SSC后實現對系統轉速上的穩定調節。后由輔系統調節產生的電信號流經CTC,主系統對其交直軸電流進行有效分配,實現對電流矢量的精確控制,從而完成控制器的有效輸出y(t),最后實現對PMSM的高性能控制。
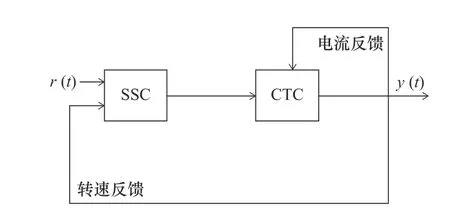
圖2 加性分解后的控制器框圖
3 輔系統控制器設計
3.1 傳統速度滑模控制器的設計
滑模控制(SMC)可以使系統在一定條件下沿規定的狀態軌跡作小幅、高頻率的上下運動,這就是所謂的“滑動模態”[7]。這種滑動模態是可以設計的,并且與系統的參數和擾動無關[1]。所以,滑模控制的強魯棒性就是這么而來。
為了設計滑模速度調節器,由圖2知,令輸入為 Δw, 輸出為iq。 首先定義調節器的狀態變量為x1=wr-w,x2=x˙1, 其中wr為 參考輸入,w為真實轉速。于是可得到:


式中:a為設計參數,a> 0。對式(12)兩邊求導,則有:

為了實現控制調節器優良的動態響應,摒棄一般趨近率而采用指數型的( ε>0),所以得滑模控制器的表達式為:

于是通過積分計算可得到iq的參考值為 :

由李雅普諾夫(Lyapunov)定理和滑模到達條件s˙s<0,證明系統是漸進穩定的。根據PID理論知,控制器中含有積分,可使抖振削弱些,也就可減小穩態誤差;但抖振依然明顯,所以下節將進行改進滑模的設計。
3.2 改進速度滑模控制器的設計
滑模的抖振是肯定會存在的,若是完全消除那也就會消除SMC的強魯棒性,因此只能盡可能削減。其產生抖振現象的主要緣由是非理想的切換、慣性影響和測量誤差,而 ε還決定動態滑模的運動品質。
所以本文改進速度滑模控制器主要是針對ε進行優化,將傳統控制器中切換項系數改進為其中 λ為待調節參數,這里將切換項引入誤差絕對值項 |e|,在系統逐漸趨于滑模面時,誤差絕對值逐漸到0,將切換項占比拉低,繼而削弱系統產生的抖振程度。又因系統運行時是不斷地變化、權重更新,所以也提高系統的自適應能力。依據上述推論,基于改進滑模控制時的控制量最終表達式如式(16)所示。

4 主系統控制器設計
機床伺服驅動控制系統既要考慮轉速還要考慮電流的轉矩輸出能力,而且對電流環的跟蹤作用也能使系統具有良好的動態響應效果。所以對交直軸電流進行跟蹤分配,這樣做能夠提升系統的動態響應,又可以增加單位電流輸出轉矩的能力。
設定子電流is與d軸的夾角為β,則d、q軸電流可以表示為

再結合式(18)的電磁轉矩公式

得到電磁轉矩電流比,即

此時對控制轉矩角的條件求解可轉換為數學問題,即根據式(19)對β求偏導,可得
5 仿真結果和分析
為驗證用加性分解PMSM的改進滑模控制方法的有效性,構建了如圖3所示的控制系統結構框圖。
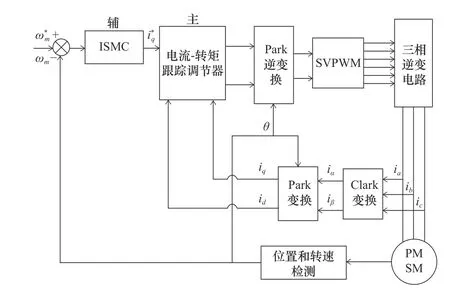
圖3 基于加性分解PMSM的控制系統結構框圖
在Matlab環境下建立了系統仿真模型仿真,仿真中所用電機的參數設置為:極對數4,Ld=5.25mH,Lq=12mH,定子電阻R=2.87 Ω,磁鏈是0.175 Wb,轉動慣量J=0.003 k g·m2, 阻尼系數為0.008 N·m·s。
輸入低轉速100 r/min,初始時刻空載運行,在時間0.2 s時突施10 N·m的轉矩TL,仿真如圖4所示。由圖4可知(右邊是經過加性分解結構的,左邊是未經加性分解的),明顯對比出傳統SMC控制經加性分解后具有更好的動態響應和穩態性能;尤其是在突施負載時,后者掉速明顯比較小且恢復時間較短,因此效率更快。由圖5也看出,經加性分解控制后的轉矩波動更小,抗干擾能力強。
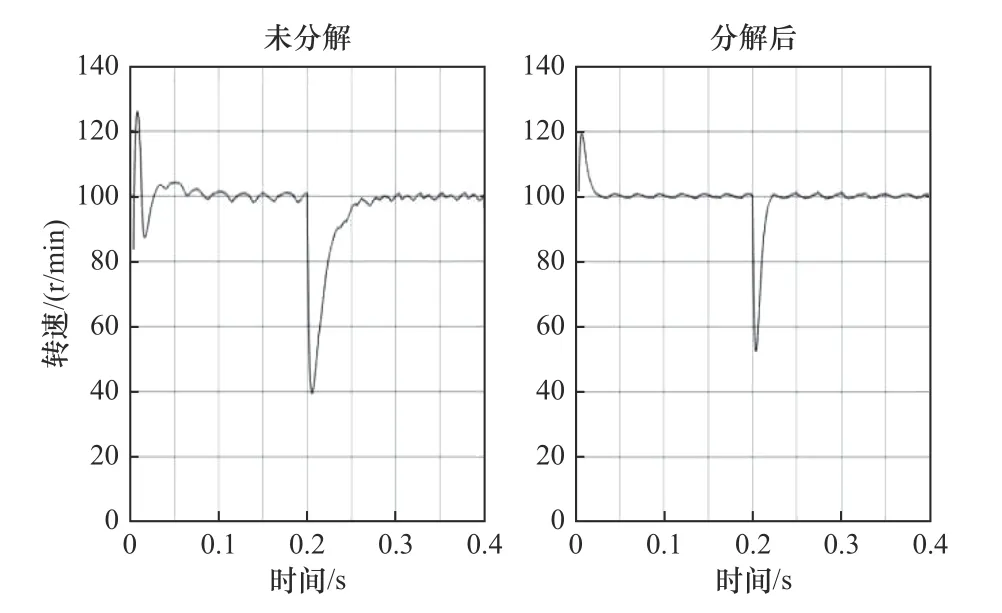
圖4 轉速響應曲線

圖5 電磁轉矩響應曲線
盡管如此,還是解決不了傳統SMC固有的抖振問題,因此進一步分析了改進滑模控制。如圖6所示為改進SMC后的轉速響應曲線,再由其圖7的改進前后對比分析知,在結合加入誤差絕對值反饋后,改進滑模控制器在系統運行時持續調整,提高系統的自適應能力,削弱了傳統SMC的抖振問題,平滑運行,印證了所提方法的有效性。
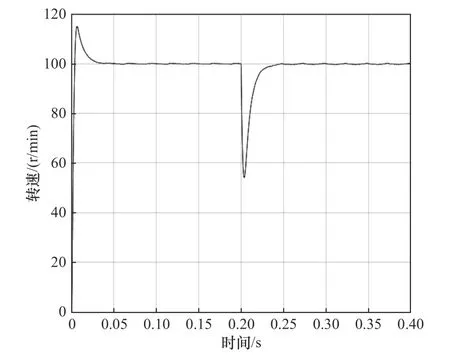
圖6 改進SMC轉速響應曲線
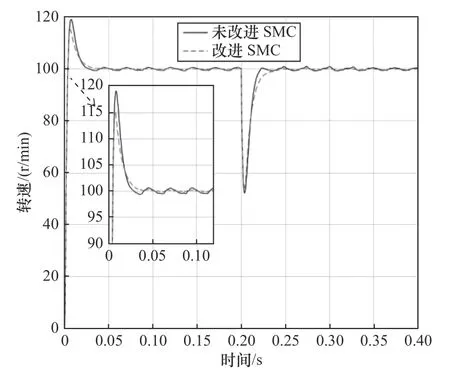
圖7 改進SMC前后對比
6 結語
本文設計了一種基于加性分解原理的PMSM控制方法,將系統的控制任務分別在主系統和輔系統內完成。該方法在保證系統穩定的基礎上,不僅簡化了控制過程,而且可以提高對PMSM控制精度以及系統的動態品質。仿真試驗證明,本文所提的結構復合控制方法,拓寬了調速范圍,增強了帶載能力和抗干擾能力,削弱了傳統滑模所固有的抖振,符合機床電機運行要求。該方法簡單實用,易于實現,對工程應用具有一定參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
