基于Levenberg Marquardt 的數(shù)控機(jī)床主軸負(fù)載振動(dòng)的非線性擬合
2022-05-12 07:22:02林海森鄒朝圣廖妮蘭廖城鴻
制造技術(shù)與機(jī)床 2022年5期
關(guān)鍵詞:振動(dòng)
林海森 鄒朝圣 廖妮蘭 廖城鴻
(廈門萬久科技股份有限公司,福建 廈門 361021)
生產(chǎn)制造,從早期的人工、機(jī)械、半自動(dòng)化和自動(dòng)化,到信息化、數(shù)字化,再到現(xiàn)在的智能制造,其發(fā)展趨勢已勢不可擋,而且智能制造也是全球制造業(yè)發(fā)展的趨勢[1]。智能制造離不開數(shù)控機(jī)床,在我國“智能制造2025”的環(huán)境下,數(shù)控機(jī)床主軸振動(dòng)信號的采集、監(jiān)控與分析已經(jīng)成為了行業(yè)熱議的話題。如蘇健[2]等提出基于三次樣條函數(shù)的 FFT 優(yōu)化算法,研究了機(jī)床主軸的振動(dòng)信號;萬海波[3]等基于 HHT 的主軸振動(dòng)信號,實(shí)時(shí)監(jiān)測振動(dòng)信號的時(shí)頻分布;董鑫[4]等利用譜圖小波閾值降噪、逆變換,分析了滾刀主軸振動(dòng)信號。研究數(shù)控機(jī)床主軸振動(dòng)量,將數(shù)據(jù)可視化對于智能化生產(chǎn)與管理具有十分重要的意義。
數(shù)控機(jī)床加工時(shí),其主軸振動(dòng)量與主軸轉(zhuǎn)速、進(jìn)給速度和切削量這3個(gè)變量因素息息相關(guān),而三者與主軸振動(dòng)量是非線性關(guān)系,尋求關(guān)系函數(shù)需求解非線性方程。當(dāng)前求解非線性方程組最常用的經(jīng)典方法為牛頓法(Newton)方法,高斯牛頓法(Gauss-Newton)方法,列文伯格-馬夸爾(Levenberg-Marquardt,L-M)方法等,其中L-M算法介于牛頓法與梯度下降法之間的一種非線性優(yōu)化方法,具有梯度法和牛頓法的優(yōu)點(diǎn)[5-6]。
L-M算法與最小二乘方法關(guān)系密切,能有效解決多元非線性曲線擬合,估算函數(shù)的未知參數(shù),在工程應(yīng)用中很有實(shí)用價(jià)值。其使用信賴域,修正阻尼因子u,當(dāng)u很小時(shí),步長取牛頓法(Newton)的最優(yōu)步長,當(dāng)u很大時(shí),步長取梯度下降法(Gradient Descent)的最優(yōu)步長,得到合適的值,在迭代更新過程使方程有效收斂,最終達(dá)到求解結(jié)果[6-7]。
本文使用三維度的速度傳感器(VB-300)分別收集數(shù)控機(jī)床主軸負(fù)載時(shí)的振動(dòng)速度量與主軸轉(zhuǎn)速、進(jìn)給速度和切削量3個(gè)因素的關(guān)系數(shù)據(jù),以L-M算法為基礎(chǔ),進(jìn)行多元非線性曲線擬合求得最終關(guān)系函數(shù),實(shí)現(xiàn)數(shù)控機(jī)床主軸負(fù)載時(shí)振動(dòng)量的估測,以及對加工過程中出現(xiàn)異常的報(bào)警。
1 檢測系統(tǒng)方案設(shè)計(jì)
本文選取速度傳感器(VB-300),具有三維度的速度檢測,用于采集機(jī)床主軸振動(dòng)信號,速度傳感器安裝于機(jī)床主軸右側(cè),不影響加工,其整體布局效果如圖1所示,系統(tǒng)框架圖如圖2所示。
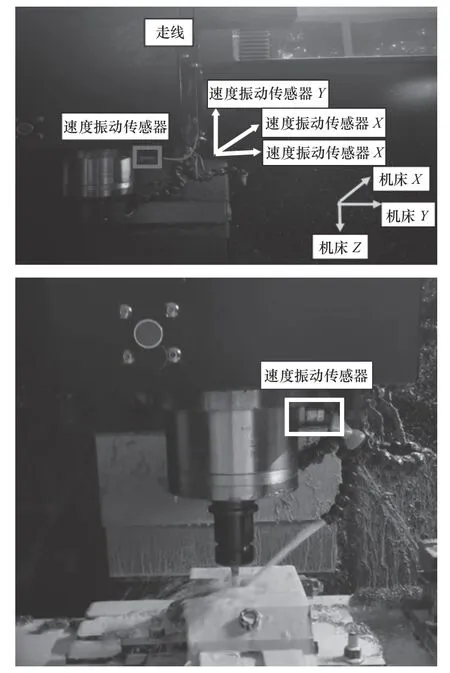
圖1 速度傳感器布置
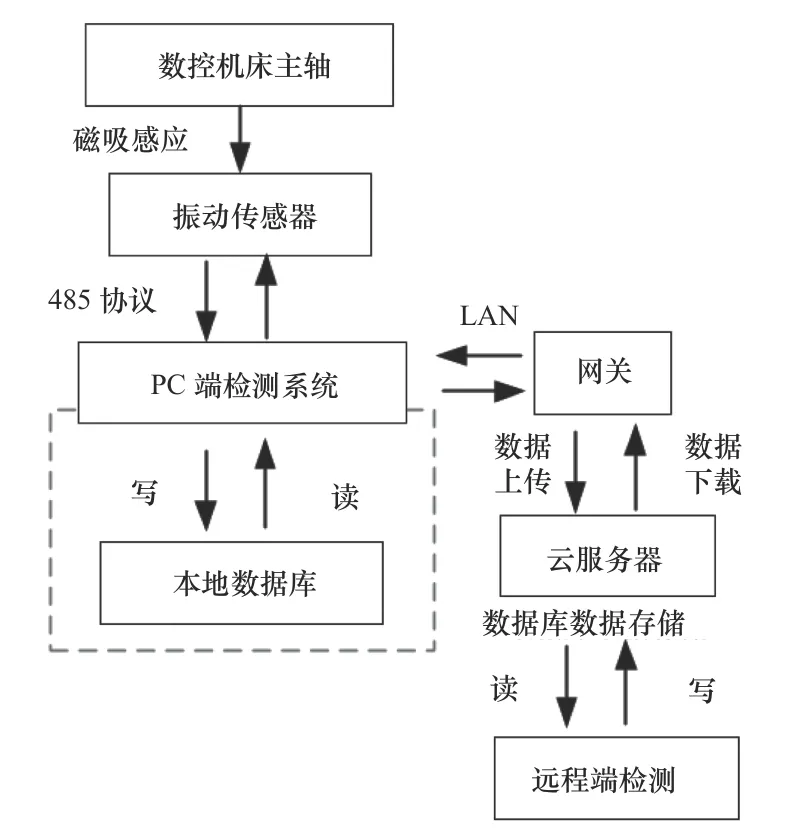
圖2 系統(tǒng)框架圖
2 多元非線性擬合
2.1 主軸振動(dòng)與因變量關(guān)系
數(shù)控機(jī)床主軸負(fù)載時(shí),其振動(dòng)幅度與主軸轉(zhuǎn)速x1、進(jìn)給速度x2、切削量x3的變量因素相關(guān),當(dāng)變量因素都不變的情況下,加工過程中隨著時(shí)間t的變化,主軸在3個(gè)方向的振動(dòng)值Y在應(yīng)許的容差內(nèi)波動(dòng),呈現(xiàn)水平分布,如圖3所示。

圖3 主軸振動(dòng)與時(shí)間關(guān)系圖
為了便于推算擬合的函數(shù)關(guān)系式,根據(jù)主軸負(fù)載時(shí)的振動(dòng)數(shù)據(jù),分別取3組數(shù)據(jù)進(jìn)行擬合,可得數(shù)控機(jī)床的主軸轉(zhuǎn)速x1、進(jìn)給速度x2、切削量x3與主軸振動(dòng)幅度關(guān)系分別呈現(xiàn)指數(shù)函數(shù)關(guān)系(y=eAx+B)。同時(shí),考慮擬合效果,主軸轉(zhuǎn)速數(shù)值縮小1 000倍進(jìn)行擬合,即取7.2~9.6 r/min,其曲線分布如圖4~6所示。

圖4 主軸轉(zhuǎn)速與主軸振動(dòng)值關(guān)系圖
2.2 基于L-M的多元非線性曲線擬合
本文基于L-M算法,分析了機(jī)床主軸負(fù)載時(shí)的振動(dòng)與主軸轉(zhuǎn)速x1、進(jìn)給速度x2和切削量x3三者的關(guān)系,估測主軸的速度振動(dòng)值。確立初始函數(shù)關(guān)系的主流程,如圖7所示。
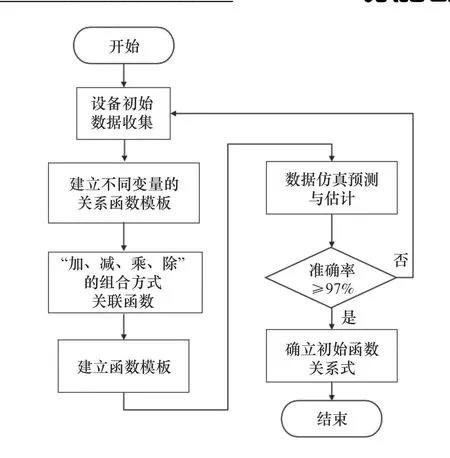
圖7 確立函數(shù)關(guān)系式流程圖
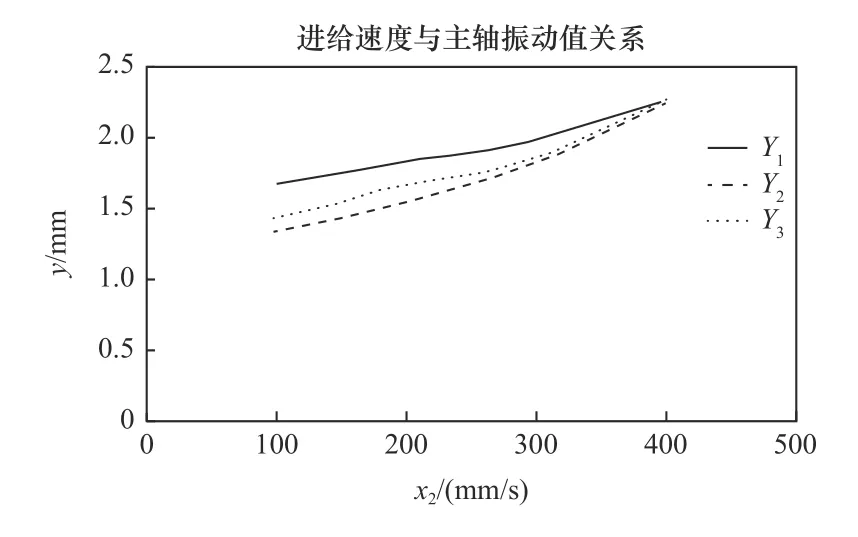
圖5 進(jìn)給速度與主軸振動(dòng)值關(guān)系圖
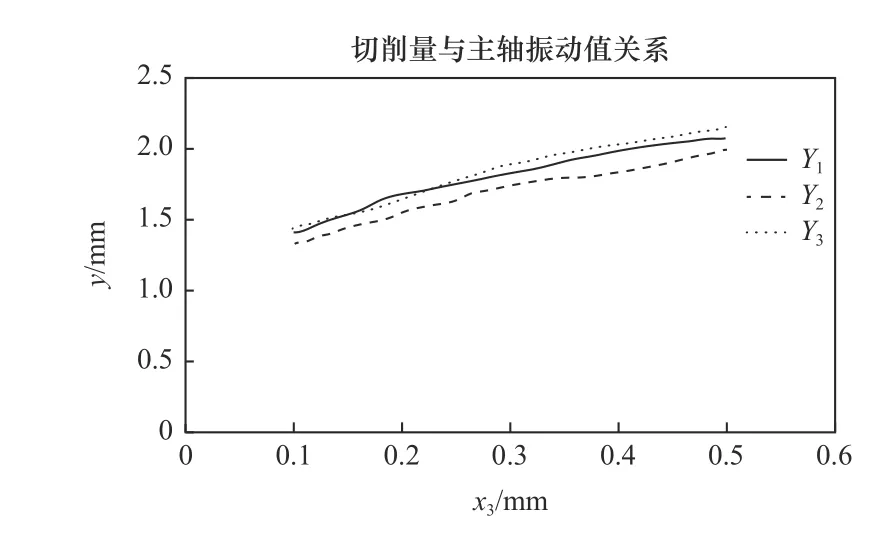
圖6 切削量與主軸振動(dòng)值關(guān)系圖
多元非線性曲線擬合實(shí)現(xiàn)過程如下:
(1)求取參數(shù) β=(β1,β2,β3,β4,β5)的初始函數(shù)Yi=f(Xi,β),結(jié)合上述2.1內(nèi)容中確定的不同變量的關(guān)系函數(shù)模板,進(jìn)行“加、減、乘、除”方式組合,
確立初始函數(shù)關(guān)系式為

以下以Yi=f(Xi,β)進(jìn)行表示計(jì)算。
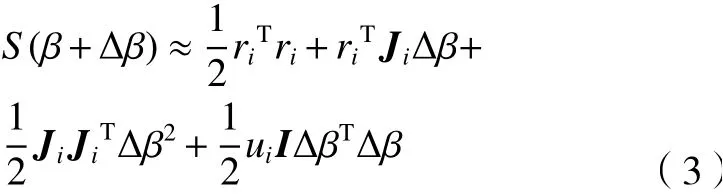
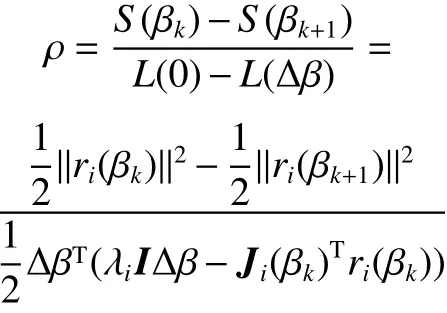
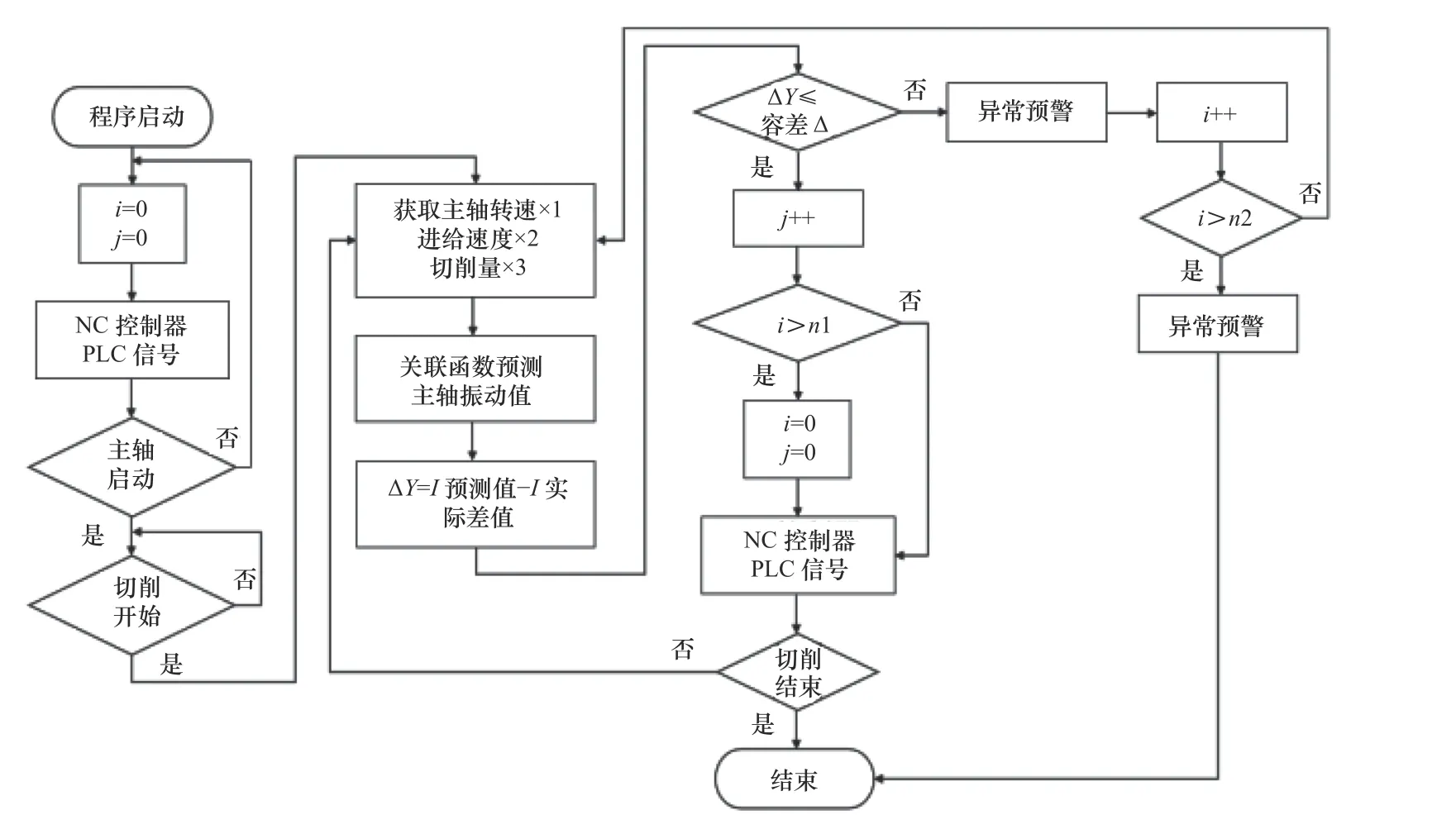
(2)初始給定一組數(shù)量為m的經(jīng)驗(yàn)數(shù)據(jù)(Xi,Yi),0 (3)求取最優(yōu)參數(shù)β,可由偏差ri(β)的 平方S(β)和最小求得,用最小二乘法方式表示有 (4)由于雅克比矩陣 根據(jù)一階泰勒展開有 結(jié)合式(1)有 (5)L-M算法使用了一種帶阻尼的高斯-牛頓方法,式(2)引入阻尼項(xiàng),有 其中:I為單位矩陣,正阻尼因子ui=||ri(βk)||2全局收斂[8],0 (6)求偏差的最小值,則對式(3)求偏導(dǎo),并令為0,則有 (7)若 ||gi(βk)||∞≤ε1則退出迭代,否則繼續(xù),常數(shù)值 ε1=10-15。 (8)若 | |Δβ||2≤ε2(||βk||2+ε2),則退出迭代,否則繼續(xù),常數(shù)值ε2=10-15。 (9)更新 βk+1=βk+Δβk。 (10)計(jì)算增益比 (12)重復(fù)(6)到(11)的步驟,直至迭代結(jié)束。 本文通過擬合的曲線進(jìn)行估測主軸的振動(dòng)值,與實(shí)際值比較,當(dāng)超過應(yīng)許的容差時(shí),判斷為異常,主軸停止并報(bào)警處理,保證機(jī)床加工的穩(wěn)定性。實(shí)現(xiàn)異常報(bào)警的程序流程圖,如圖8所示,其中n1為每組數(shù)據(jù)的數(shù)量、n2為數(shù)據(jù)異常的數(shù)量。 圖8 異常判斷流程圖 根據(jù)上述步驟,擬合曲線方程為確立初始函數(shù)關(guān)系式為 本文相關(guān)測試設(shè)備組成如表1所示,其測量的振動(dòng)值對應(yīng)的容差參考值如表2所示,其他變量條件: 表1 主要設(shè)備 表2 容差參考表 主軸轉(zhuǎn)速7 200 r/min≤x1≤9 600 r/min;進(jìn)給速度100 mm/s≤x2≤ 400 mm/s;切削量0.1 mm≤x3≤0.5 mm。 隨機(jī)選取3組數(shù)據(jù)進(jìn)行估測比較,其實(shí)驗(yàn)結(jié)果如表3所示。 表3 實(shí)驗(yàn)數(shù)據(jù)表 綜上所述,在數(shù)控機(jī)床主軸負(fù)載時(shí),有: (1)主軸轉(zhuǎn)速間隔800取一組,共4組;進(jìn)給速度間隔100取一組,共4組;切削量間隔0.1取一組,共5組。三者之間自由組合,共80組,保證數(shù)據(jù)的可靠性。 (2)容差值與主軸振動(dòng)幅度值正相關(guān),可減少誤差放大,提高數(shù)據(jù)估測的準(zhǔn)確性。 (3)隨機(jī)性抽取多組數(shù)據(jù)驗(yàn)證,合格率超過97%,保證數(shù)據(jù)估測的有效性。 因此,本文所述算法能很好地?cái)M合估測主軸振動(dòng)量與主軸轉(zhuǎn)速、進(jìn)給速度和切削量三者的關(guān)系,保證數(shù)控機(jī)床加工的穩(wěn)定性。 本文基于Levenberg Marquardt算法,多元非線性擬合,確立主軸轉(zhuǎn)速、進(jìn)給速度和切削量三者與機(jī)床主軸速度振動(dòng)量的函數(shù)關(guān)系。在數(shù)控機(jī)床加工中,實(shí)時(shí)監(jiān)測主軸振動(dòng)狀態(tài),判斷主軸是否異常和刀具是否斷裂,保證數(shù)控機(jī)床加工的穩(wěn)定性,提高生產(chǎn)效率。實(shí)驗(yàn)結(jié)果表明,該方式能有效地預(yù)估主軸的速度振動(dòng)量,準(zhǔn)確率超過97%。同時(shí),對于后續(xù)數(shù)控機(jī)床主軸的平衡性、撞擊和刀具壽命管理等有很大的參考價(jià)值。






2.3 異常報(bào)警監(jiān)測
3 實(shí)驗(yàn)結(jié)果




4 結(jié)語
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48天天愛科學(xué)(2020年6期)2020-09-10 07:22:44瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40船海工程(2015年4期)2016-01-05 15:53:26噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44計(jì)算物理(2014年2期)2014-03-11 17:01:44鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
