基于最優時間間隔的足式機器人足端軌跡規劃*
2022-05-12 07:15:08辛玉紅章永年
制造技術與機床 2022年5期
關鍵詞:優化
辛玉紅 章永年
(①金陵科技學院機電工程學院,江蘇 南京 211169;②南京農業大學工學院,江蘇 南京 210031)
足端軌跡直接影響足式機器人的運動平穩性[1-2],是國內外學者的研究熱點。利用笛卡爾坐標表示的足端軌跡易于實現地面接觸檢查、避障等功能[3-4],因此目前足端軌跡規劃研究主要集中在足端軌跡曲線對運動平穩性的影響。如Cho J等[5]考慮到地面對足端的支持力影響,對垂直地面方向的足端軌跡曲線進行了規劃,提高了機身穩定性。Chae K G等[6]優化了gallop步態的騰空相軌跡,降低了運動能耗。王立鵬等[7-8]提出一種零沖擊的足端軌跡規劃改進算法,減小了換相時的地面沖擊力。Gao M等[9]通過優化入地角和足端軌跡曲率來提高機器人運動性能。
進行足端軌跡規劃時,一般在任務空間產生一系列滿足足端速度、加速度等約束條件的等時間間隔的離散數據點(任務空間),再進行運動學反解后得到各關節電機角度(關節空間),發送給各關節驅動器,使其按照要求運動。然而,足式機器人任務空間和關節空間存在非線性映射關系[10],僅僅在任務空間內規劃得到的軌跡可能會導致機器人關節運動不平穩,但目前的足端軌跡規劃算法基本沒有考慮到這個問題。
實際上,在工業機器人的軌跡規劃中也存在類似的問題。一般地,研究人員將任務空間軌跡離散為若干離散點,再在關節空間內規劃出過這些點的關節運動平穩的軌跡。如Gasparetto A等[11]在考慮運動學限制的前提下,采用五次B樣條曲線進行規劃,進而采用優化算法得到加工時間和加加速度加權和最小[12-13]的目標軌跡。Liu H等[14]、Olabi A等[15]和Alatartsev S等[16]對關節空間的運動平穩性進行了優化,但犧牲了離散點間的運動精度。這種軌跡規劃算法適用于對軌跡精度要求不高的情況。
考慮到任務空間內足端軌跡曲線對運動性能的影響,本文在保證任務空間離散點軌跡不變的前提下,分析任務空間和關節空間速度間的非線性映射關系,對已經規劃好的離散點所對應的時間間隔進行重新規劃,構建機器人關節空間、任務空間運動性能指標與離散點時間間隔的關系,利用改進的遺傳算法獲取最優的時間間隔,使其滿足兼具任務空間、關節空間的平穩性運動要求。
1 機器人模型分析
本文中所采用的機器人(如圖1所示)為內膝肘式,機器人的4條腿具有相同的機械結構,每條腿具有3個關節,每個關節由1個直流伺服電機控制。
對于圖1所示的機器人三段式腿部結構,有研究表明人及大型的四足動物腿部結構中大腿、小腿和足部的腿節比例為0.39∶0.45∶0.16,小型哺乳類動物常見的腿節比例為0.33∶0.33∶0.33,這樣的構形配置可以為它們帶來較大的工作空間及較好的加速性能。因此本文也采用這樣的腿節比例,具體的尺寸參數如表1所示。
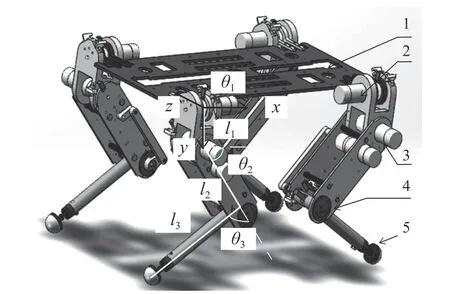
圖1 四足機器人三維模型
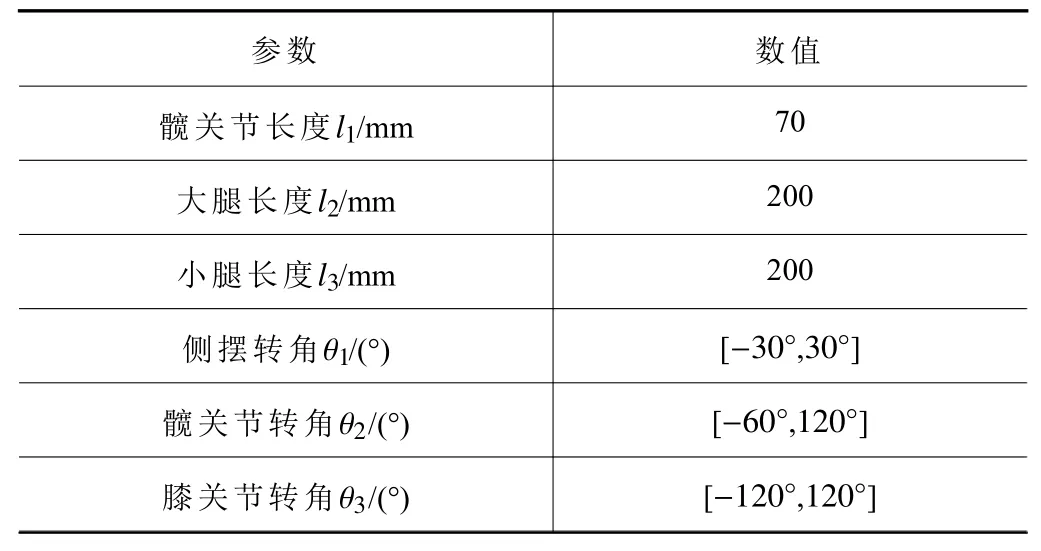
表1 機器人單腿結構參數

式中:J為速度雅克比矩陣,由下式確定。

由于任務空間與關節空間的存在非線性的速度映射關系,因此僅在任務空間內進行足端規劃可能會導致關節電機的速度、加速度超限或發生突變,影響機器人的運動平穩性。
2 機器人足端軌跡的多目標優化算法
與單目標優化問題一樣,多目標優化問題包括目標函數,決策變量和約束條件[17],其一般結構如下
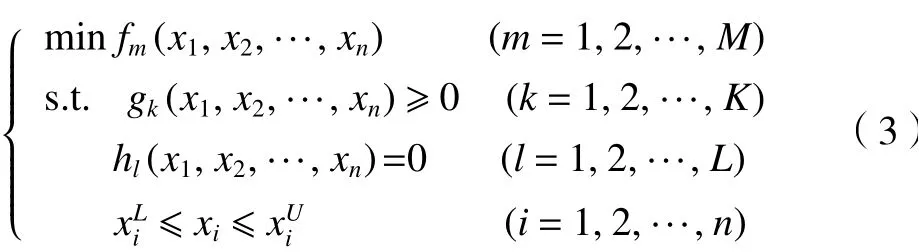
式中:X?Rn為 決策空間,集合顯然可行為變量上下界。同時該多目標問題的可行域域 Ω?X。
2.1 設計變量
由于機器人控制器產生步態軌跡離散點的方法各異,為了保持本文算法的普適性,在這里不改變已經離散好的軌跡點Pi,只是更改離散軌跡點之間的時間間隔 Δti,從而對各關節速度、加速度進行調整。因此,該機器人軌跡規劃的多目標問題的設計量為x=(Δt1,Δt2,···,Δtn), 其中n為1個步態周期內足端軌跡的離散點個數。
2.2 約束條件
(1)步頻約束
優化前后機器人的運動速度保持不變,記T為機器人步態周期,有

(2)任務空間運動學約束
足式機器人在任務空間的運動平穩性會影響機器人與地面的接觸力,因而足端軌跡在任務空間也必須保持平穩運動,有

式中:vi、ai分 別為第i個足端軌跡點的速度、加速度,vmax、amax為其許用的最大速度、加速度。
(3)關節空間運動學約束
每個關節均受到關節最大速度、加速度、加加速度的限制,即

式 中:Vk,i、Ak,i、Jk,i分 別 代 表 第k個 關 節 在 第i個 足端軌跡點的速度、加速度及加加速度,Vk、Ak、Jk代表第k個關節許用的最大速度、加速度及加加速度。
2.3 目標函數
無論在關節空間還是任務空間,機器人的運動都應具備良好的運動平穩性。對運動平穩性的衡量可以表征為速度、加速度變化小,也就是系統具有較小的平均加速度和較小的平均加加速度。于是機器人任務空間的平穩性能子目標函數為
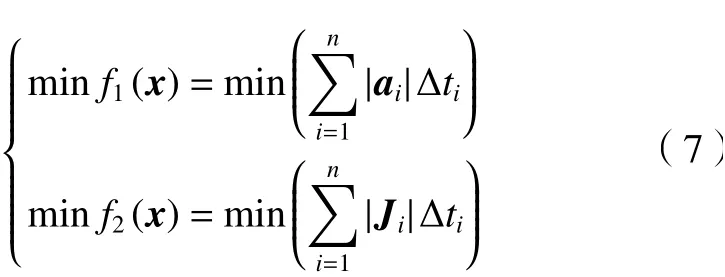
每個機器人關節的關節空間平穩性性能子目標函數為
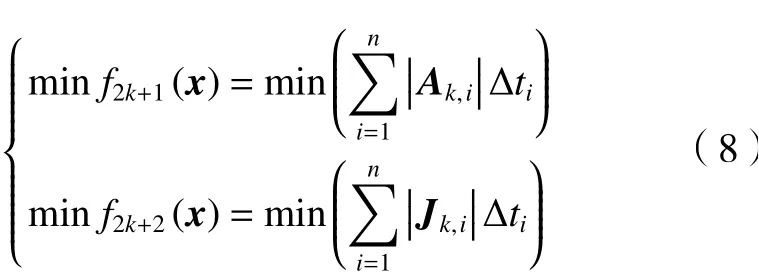
單腿含有3個關節,因此關節空間平穩性性能子目標函數一共有6個。基于上述的約束條件和子目標函數的分析,建立足端軌跡的多目標優化模型

3 遺傳算法
3.1 歸一化處理
首先對各個獨立的分目標函數求最大值和最小值,再將實際的目標函數轉換為0~1之間的一個無量綱數。即

為了將不同的性能因素在目標衡量中的相對重要程度定量化,設Wm為幾種性能指標的權比,該值采用層次分析法計算得到,這樣統一的目標函數為

3.2 改進遺傳算法
待優化單目標函數式(11)是一個非線性優化問題,運用標準優化算法很難解決,這里采用改進遺傳算法來求解。其算法流程圖如圖2所示。
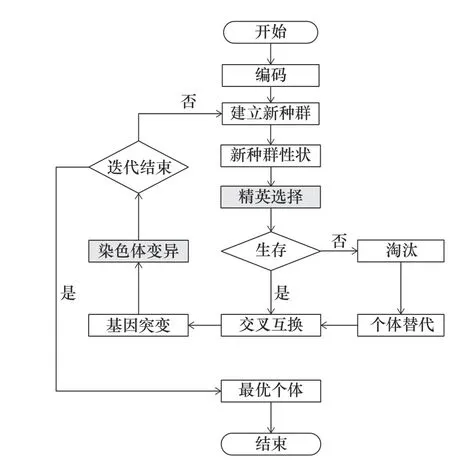
圖2 GA流程圖
與常規染色體變異[18]不同,本文對單個染色體上多個基因組進行變異。具體過程如下:
(1)基因組劃分
本文的染色體由 Δti按序排列而成,如圖3所示。

圖3 單個染色體
當軌跡點Pi運動學參數不滿足任務空間運動學約束或關節空間運動學約束時,該點即為染色體上基因組分割點,據此劃分得到基因組如圖4所示。
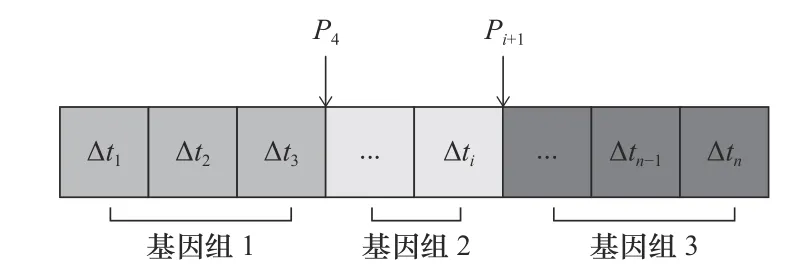
圖4 基因組劃分圖
(2)變異過程
完成基因分組后,在軌跡點不變的情況下,增大某軌跡點Pi附近的時間長度可以降低關節空間速度、加速度、加加速度和足端速度、加速度的大小及突變程度。但若只對Pi點附近的時間長度作調整,可能會導致附近其他軌跡點出現峰值,使得優化效果有限,甚至更差。故而將調整目標擴展到基因組。將該基因組進行整體縮放,同時乘以染色體片段突變 系 數Ci, 實 現 增 大 Δti的 目 的。
4 試驗結果與分析
試驗用四足機器人樣機如圖5所示,驅動裝置選用Maxon的RE35直流有刷電機及LT1100直流伺服驅動器。
圖5 機器人樣機
機器人行走時應該盡量滿足行走平穩、關節沖擊小、跨步迅速和軌跡圓滑等要求,因此足端軌跡選用北京理工大學提出的一種零沖擊足端軌跡[7],步態采用速度快、穩定性好的對角步態。設置步距100 mm,步高40 mm,步態周期4 s,離散點總數為100,得到圖6所示的待優化的離散點序列Pi。足端軌跡位于xy平面內,相鄰2個離散點之間的時間間隔均為0.04 s。
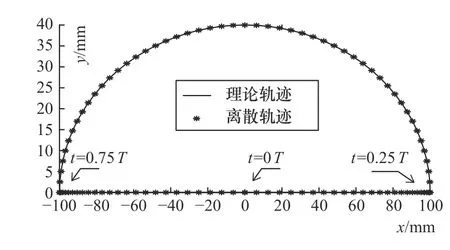
圖6 四足機器人橢圓足端軌跡
利用改進的遺傳算法對離散點序列進行軌跡優化,其算法參數如表2所示。
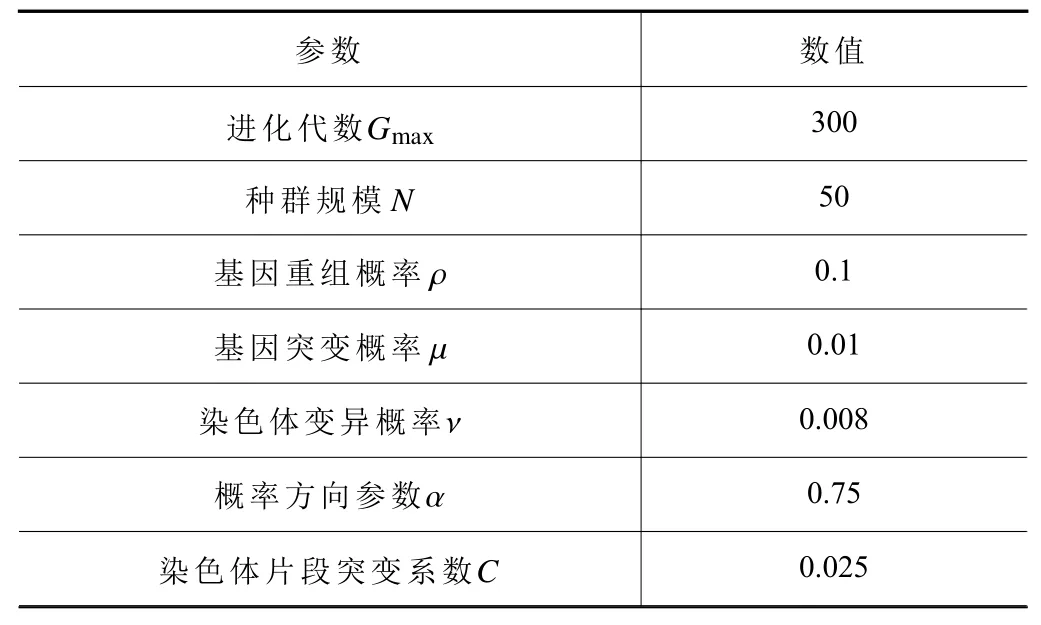
表2 算法參數
由于足端軌跡在Z方向沒有變化,因而優化前后橫擺關節的角度保持不變。將優化前后的各關節PVT信息發送至驅動器,得到實物樣機髖、膝關節速度、加速度和加加速度的情況如圖7所示。
從圖7可以看出,優化前的足端軌跡在1 s、3 s附近時速度、加速度和加加速度均有不同程度的突變,此時足端軌跡位于支撐相與騰空相的轉換之中,由于整個足端軌跡曲線在支撐相與騰空相轉換的位置處僅為C1連續,因而在進行軌跡規劃時容易在此處發生速度突變,影響運動的平穩性。
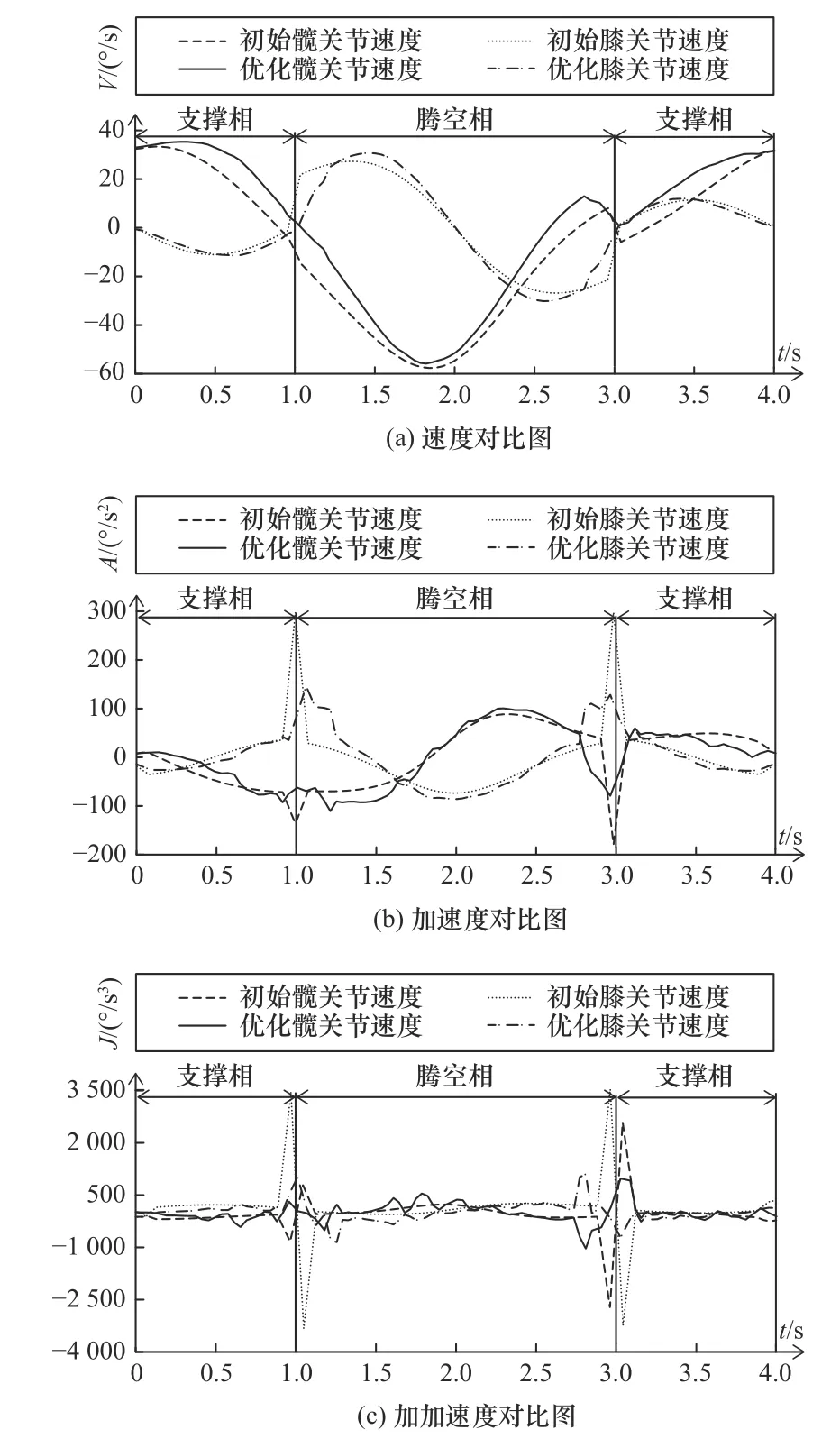
圖7 優化前后關節空間性能對比圖
優化后的速度曲線比優化前的速度曲線更加平滑,換相點處的速度突變現象也得到了很大的改善。優化后的加速度、加加速度峰值均不同程度的降低,提高了運動的平穩性,具體的性能指標如表3所示。
從表3可以看出,無論是騰空相還是支撐相,髖關節和膝關節的峰值加速度和峰值加加速度都比優化前有所下降,最高降幅達77.15%,最低降幅也有37.22%。另外除了膝關節的平均加速度較原來提高10.89%外,髖關節的平均加速度、兩個關節的平均加加速度均比優化前有所下降。從而可以表明優化后關節空間的運動平穩性能得到大幅提升。
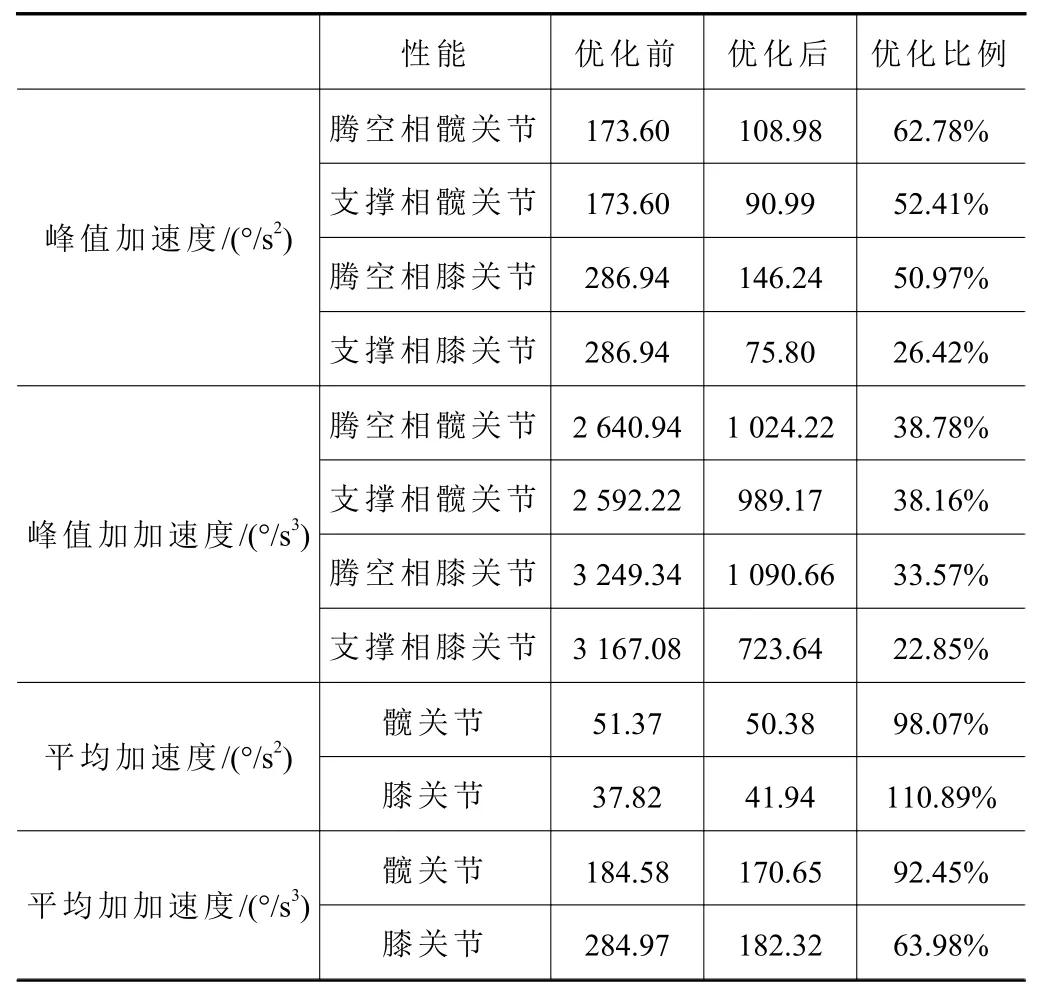
表3 優化前后性能對比
足式機器人在任務空間的運動平穩性會影響機器人與地面的接觸力,因而在提高關節空間的運動平穩性能同時,其任務空間的運動平穩性也應基本保持不變甚至有所提升。圖8給出了優化前后任務空間的加速度對比。
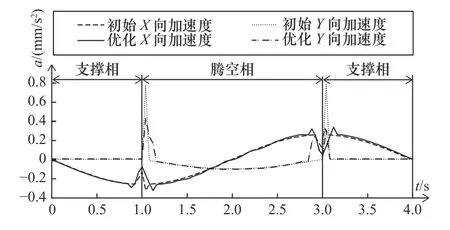
圖8 優化前后任務空間性能對比圖
從圖8可以看出,優化前后X向的加速度曲線變化不大,可以看出本文提出的遺傳算法由于采用了分段染色體變異的策略使得能選擇性保留原有比較優秀的加速度曲線。而優化前Y向在換相點處存在較大的加速度突變,經過優化后,在1 s、3 s時刻最大沖擊分別減小了45.83%和61.82%,由于機器在行走過程中,Y方向上的沖擊是機身造成翻轉和傾覆的主要影響因素,因而能大大減小行走沖擊,提高機器人行走的穩定性。
5 結語
本文提出了一種優化四足機器人足端軌跡的新方法。在不改變已經離散好的軌跡點的前提下,在關節空間、任務空間運動學約束條件下,以任務空間和每個機器人關節的關節空間平穩性性能為評價指標,利用遺傳算法優化軌跡點之間的時間間隔使得評價指標達到最優。試驗結果顯示:
(1)機器人各關節的峰值加速度、峰值加加速度都比優化前有所下降,表明關節電機受到較小沖擊。
(2) 除膝關節的平均加速度較原來提高外,髖關節的平均加速度、2個關節的平均加加速度均比優化前有所下降,表明關節電機的運動平穩性得到提升。
(3) 豎直方向在換相點處加速度比優化前有所下降,減小了行走沖擊,提高機器人行走的穩定性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
