強噪聲下的矢量跟蹤信號故障檢測算法
2022-05-11 07:55:24王會賓程詠梅田朝旭
西北工業大學學報 2022年2期
王會賓, 程詠梅, 田朝旭
(西北工業大學 自動化學院, 陜西 西安 710072)
矢量跟蹤環路(vector tracking loop,VTL)是一種應用于全球定位系統(global position system,GPS)接收機的信號跟蹤環路[1]。異常的電離層、對流層延遲或多路徑等其他干擾會引起接收機得到的中頻信號相對無故障信號產生較大的異常偏差,這類信號故障會使得跟蹤定位結果不準確。
針對矢量跟蹤環路的信號故障檢測算法主要包括快照法[2-4]和卡爾曼濾波方法[5-7]。其中大多直接采用鑒別器輸出的碼相位或載波相位等信息來構造故障檢測統計量。然而現有的常規鑒別器只能在跟蹤誤差接近于零的小范圍內保持線性偏差輸出能力[8]。當受到異常信號干擾影響時,跟蹤通道持續存在較大的跟蹤偏差,此時鑒別器會產生不同程度的輸出失真[9]。這無疑會對接收機的跟蹤性能產生不利影響。由于鑒別器的失真,信號故障造成的較大幅值碼相位偏差輸出為較小的偏差值,使得故障檢測算法難以檢出其異常。
除此之外,量測噪聲的增大會使得偏差小的故障混入噪聲之中難以檢測,而偏差較大的故障則由于鑒別器的失真而輸出為較小的碼相位偏差值,造成故障檢測統計量無法達到故障檢測的閾值,故障檢測算法的檢測能力大大下降。這嚴重削弱了矢量跟蹤結構在強噪聲環境下的跟蹤性能。
針對上述問題,本文首先對鑒別器輸出失真的原因及其對故障檢測算法的影響進行分析,基于此提出一種適用于強噪聲環境的矢量跟蹤信號故障檢測算法。算法設計了一種專門用于故障檢測的碼鑒別器,并利用其輸出構造故障檢測函數。針對故障檢測鑒別器的輸出與導航濾波器狀態間存在非線性映射的問題,算法采用三階球面-徑向容積準則進行測試統計量及其方差的估計。最后通過不同信號環境下的故障檢測仿真實驗對本文提出算法的性能進行分析和驗證。
1 鑒別器輸出失真對故障檢測的影響
本節首先對矢量跟蹤結構的故障檢測算法原理進行了簡要介紹,在此基礎上分析了鑒別器輸出失真對矢量跟蹤結構故障檢測算法的影響。
1.1 矢量跟蹤結構下的故障檢測算法
若直接利用鑒別器輸出的碼相位偏差信息進行故障檢測,則含有故障的碼相位偏差量測的數學模型可以表示為

(1)

將(1)式中的碼相位偏差量測減去其估計值,則可以得到只包含故障信息的測試統計量

(2)
該測試統計量在無故障情況下符合均值為零的高斯分布,在有故障情況下則符合均值為bi,k=fi,k/β的高斯分布。
將所有n個跟蹤通道的測試統計量進行整理和歸一化,可得到故障檢測函數為
(3)
其輸出的故障檢測統計量λk在無故障時服從自由度為m的中心化卡方分布,在有故障時服從非中心化卡方分布。Sk為歸一化矩陣。設故障檢測的閾值為TD,則有如下判定準則
(4)
在選取故障檢測閾值時通常需滿足當前的虛警率要求PFA,此時可根據PFA和自由度m由卡方分布表得到所需的故障檢測閾值TD。

1.2 鑒別器輸出失真對故障檢測性能的影響
在接收機信號跟蹤環路中,相關器的作用主要是將中頻信號與本地參考信號進行同相和正交相(in-phase and quadraphase,IQ)信號采樣以及碼相關,然后將結果傳送給鑒別器來計算對應的偏差信息。超前、即時和滯后的同相和正交相的相關器輸出IE,k,IP,k,IL,k,QE,k,QP,k,QL,k通常可以表示為含噪聲項的碼相位、載波頻率及載波相位偏差的函數[8]:

(5)
在(5)式中,τk,δfca,k和δφca,k分別為矢量延遲鎖定環、矢量頻率鎖定環和矢量鎖相環3種矢量跟蹤環路各自需要估計的碼相位偏差、載波頻率偏差和載波相位偏差。在無故障且環路跟蹤穩定時以上各偏差信息會收斂至零值附近。本文僅討論偽距偏差故障對矢量延遲鎖定環的影響,此時認為載波頻率偏差和載波相位偏差均穩定在零值附近。Ak是k時刻信號的幅值。R(x)是PRN序列之間的碼相關函數,d是超前和滯后參考信號之間的碼相位偏移,通常取值在1碼片以內。Dk是積分運算過程中接收到信號的數據位,對于沒有調制導航電文的衛星信號而言該項可以忽略。T是積分時間,單位為s。ωIE,k,ωIP,k,ωIL,k,ωQE,k,ωQP,k和ωQL,k是各相關器輸出中的零均值高斯白噪聲,標準差均為σIQ,k,且同相和正交相輸出的噪聲之間,超前和滯后輸出的噪聲之間均為互不相關。
以文獻[8]中的超前減滯后功率(early-minus-late power,ELP)型碼鑒別器為例,鑒別器函數可以表示為
式中,υco,k為根據(5)式推導得到的零均值噪聲,其方差為
為了從鑒別器函數中提取所需的碼相位偏差信息,通常將其乘以歸一化函數
(8)
此時ELP型碼鑒別器的輸出可以表示為
當跟蹤環中的碼相位偏差趨近于零時,(9)式為碼相位偏差的無偏估計。即:
OELP=τk+υELP,τk∈(-d/2,d/2)
(10)
然而當碼相位偏差在較大范圍內變化時,歸一化誤差也會隨之而產生。ELP型碼鑒別器歸一化以后的輸出與碼相位偏差之間的對應關系如圖1所示。

圖1 ELP型碼鑒別器輸出與碼相位偏差的關系
在無故障發生時碼相位偏差可以維持在較小的范圍內,由圖1可知,此時碼鑒別器的輸出還可以較為準確地反映碼相位偏差信息。但當故障發生使得碼相位偏差超出d/2碼片的線性輸出范圍后,不僅碼鑒別器的輸出逐漸偏離了理想輸出,使得故障檢測統計量無法準確反映故障偏差信息,更重要的是碼鑒別器的輸出隨著碼相位偏差的增加而逐漸減小,這表示無論故障造成的碼相位偏差如何,其相應的碼鑒別器輸出最大只能達到d/2碼片。其他幾種常見的碼鑒別器也存在這種輸出峰值的現象。這在量測噪聲較大的環境下對故障檢測性能會有更嚴重的影響。
根據(4)式的故障檢測判定準則可知,當故障發生時,故障檢測統計量λk的值越大,越容易超過故障檢測閾值TD,使故障被檢測到。而根據(3)式,故障檢測統計量λk的大小主要由測試統計量rk和歸一化矩陣Sk決定。圖1中碼鑒別器輸出峰值的現象使得故障發生時測試統計量rk的值被限制在峰值以內。在強噪聲環境下,量測噪聲的增大引起歸一化矩陣Sk相應增大,因此進一步降低了故障檢測統計量λk可達到的上界。這樣的后果是,當量測噪聲增大到一定程度,故障檢測統計量λk可達到的上界將始終小于故障檢測閾值TD,故障檢測算法無法再對任何偏差大小的信號故障進行可靠檢測。
因此,如何選取合適的鑒別器來構造故障檢測函數,使鑒別器的輸出失真不對故障檢測效果產生過大影響,成為了提高故障檢測算法在強噪聲環境下檢測性能的一個難點。
2 強噪聲下的矢量跟蹤信號故障檢測
2.1 適用于強噪聲環境的矢量跟蹤故障檢測結構
要降低1.2節中提到的鑒別器輸出失真問題的影響,關鍵在于提高鑒別器的正相關響應范圍。為此本節提出一種新的矢量跟蹤故障檢測結構,如圖2所示。在該結構中常規碼鑒別器的輸出只傳輸給導航濾波器導航定位而不用于故障檢測。能夠在更大范圍內反映故障碼相位偏差的故障檢測鑒別器被用來構造新的故障檢測函數。

圖2 強噪聲下的矢量跟蹤故障檢測算法結構示意圖
2.2 故障檢測鑒別器設計
本節采用一種改進的ELP型(ELPE)碼鑒別器函數對碼相位偏差的故障進行檢測。已知ELP型碼鑒別器函數的模型如(6)式所示。為提高碼鑒別器輸出對碼相位偏差τk的正相關響應范圍,選取d=2時超前和滯后的同相和正交相相關器輸出IE,k|d=2,IL,k|d=2,QE,k|d=2和QL,k|d=2構建鑒別器函數:
(11)
其輸出在(-1,1)區間內可表示為
(12)

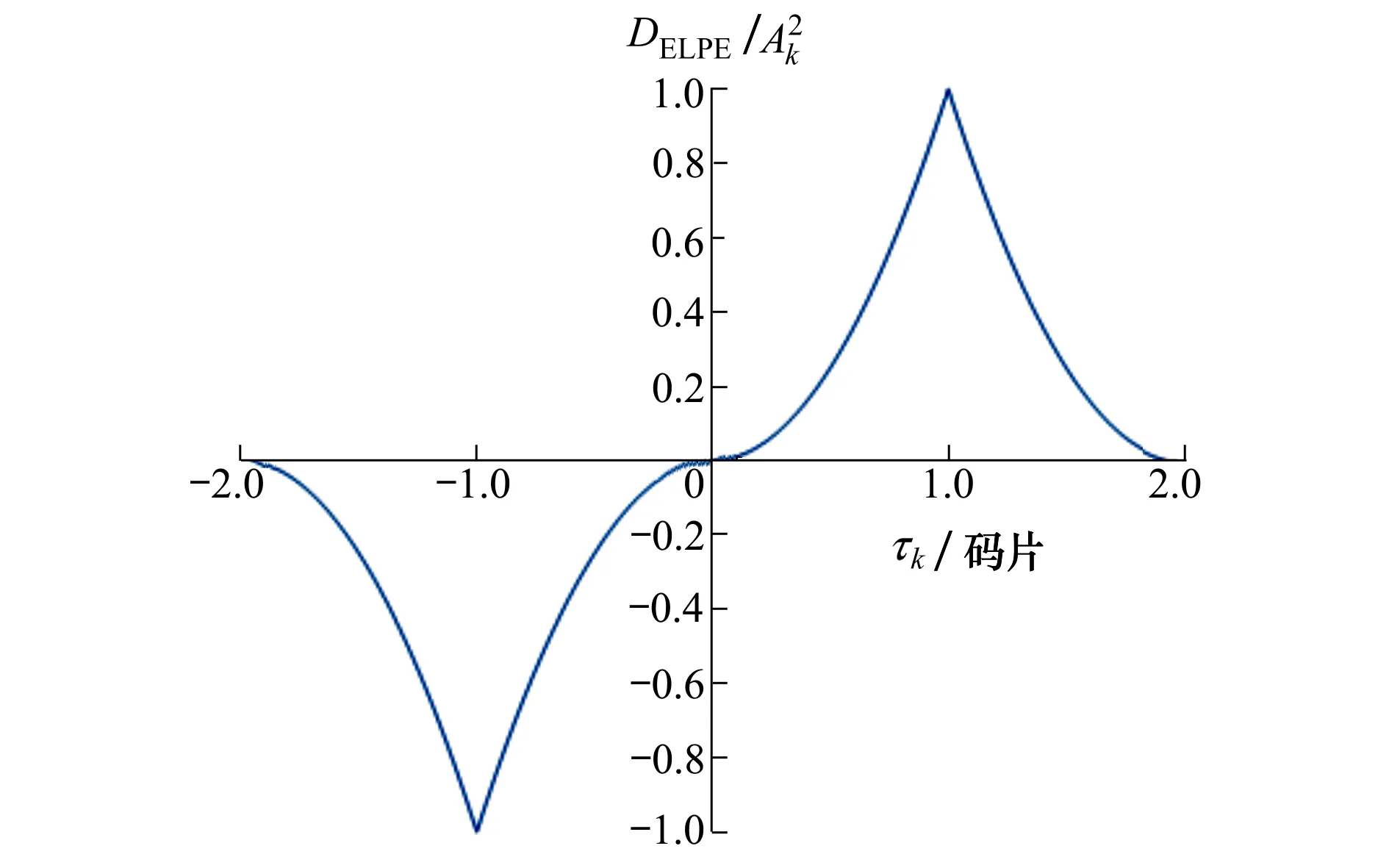
圖3 故障檢測鑒別器函數與碼相位偏差的關系
本文選取該ELPE碼鑒別器函數作為故障檢測鑒別器。相對于常規的ELP型碼鑒別器,其優勢主要體現在2個方面:①對碼相位偏差具有更大的正相關響應范圍。當故障造成的碼相位偏差超過d/2時,常規ELP型碼鑒別器的輸出由于失真開始衰減,而該故障檢測鑒別器可以保持對(-1,1)范圍內碼相位偏差的準確響應,因而可以檢測大于d/2的碼相位偏差故障。②具有更高的輸出峰值。根據1.2節的分析可知,故障檢測統計量所能達到的最大值與鑒別器輸出的峰值正相關,與量測噪聲的方差負相關。也就是說,更大的輸出峰值能使得故障檢測算法在量測噪聲更大的環境下檢測故障,而不至于因故障檢測統計量的最大值低于故障檢測閾值而完全失去檢測功能。
當無故障發生且環路跟蹤穩定時,碼相位偏差通常遠小于1碼片,此時故障檢測鑒別器函數中噪聲的方差根據(7)式可表示為

(13)
已知無故障時碼相位偏差與導航濾波器狀態間的對應關系為τi,k=1/β×Hi,kΔXk,因此通道i的故障檢測鑒別器輸出DELPE,i,k與導航濾波器狀態ΔXk間的對應關系為

(14)
所有通道故障檢測鑒別器輸出構成的碼相位偏差故障檢測量測向量DELPE,k與導航濾波器狀態ΔXk間的對應關系為
2.3 基于三階球面-徑向容積準則的故障檢測函數
上一節分析了故障檢測鑒別器的輸出與碼相位偏差的對應關系。由于故障偏差隱含在碼相位偏差信息中,根據1.1節中故障檢測算法的原理,將故障檢測鑒別器的輸出減去其估計值,則可以得到包含故障偏差信息的故障檢測測試統計量。

(16)

類似的,構造故障檢測函數
(17)

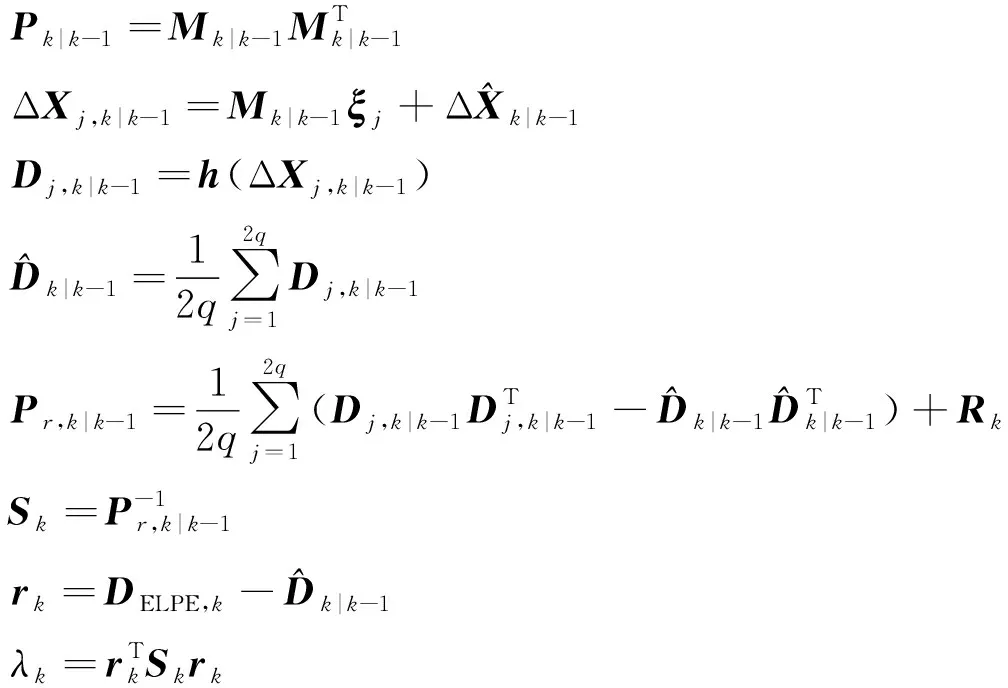
(18)

在獲得故障檢測統計量λk之后,結合(4)式中的判定準則即可對矢量延遲鎖定環進行故障檢測。
3 仿真及結果分析
本節通過仿真實驗對本文提出的適用于強噪聲環境的矢量跟蹤故障檢測算法在不同噪聲環境下的緩變和突變故障檢測能力進行分析驗證。
3.1 不同噪聲環境下的突變故障檢測
仿真過程中GPS接收機以20 m/s的速度均速直線移動60 s。期間可見衛星保持為9顆且各衛星信號的載噪比(carrier to noise power density ratios,C/N0)穩定在40 dBHz,此時故障檢測閾值TD=39.34(給定PFA=10-5)。初始20 s不注入故障,使各衛星信號通道的環路跟蹤能夠收斂并保持穩定。從20 s開始分別向編號PRN 11的衛星注入偏差為0.5,1,1.25碼片的突變故障(對應146,293,366 m的偽距突變故障)。在此過程中記錄利用1.2節所述ELP型碼鑒別器輸出直接進行故障檢測的算法(簡稱傳統算法)與本文提出的采用故障檢測鑒別器進行故障檢測的算法(簡稱本文算法)的故障檢測統計量,如圖4所示。
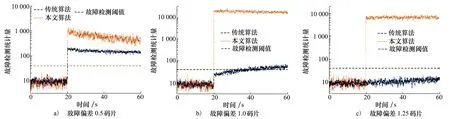
圖4 40dBHz下不同偏差突變故障的故障檢測統計量
當故障造成的碼相位偏差在0.5碼片以內時,2種碼鑒別器的輸出均可以如實反映碼相位偏差信息。同時由于環境中量測噪聲很小,故障檢測統計量的期望值較大,2種故障檢測算法均可以很容易地檢出故障,見圖4a)。當故障造成的碼相位偏差超過0.5碼片時,常規鑒別器的輸出開始產生失真。在碼相位偏差達到1碼片時,常規鑒別器的輸出甚至遠小于0.5碼片,使得故障難以被檢測出來。作為對比,故障檢測鑒別器的輸出仍能正確反映碼相位偏差信息,故障檢測統計量也遠大于0.5碼片時的對應值,保持了對1碼片偏差突變故障的快速檢測,見圖4b)。當突變故障造成的碼相位偏差達到1.25碼片時,常規鑒別器輸出對應的故障檢測統計量已基本與無故障時持平。而故障檢測鑒別器的輸出雖然也略有失真,但仍能保持大于0.5碼片時的對應值,故障檢測算法也能迅速檢出故障,見圖4c)。
當環境中信號噪聲增加時,故障檢測統計量的幅值也會隨之下降,使得故障檢測能力降低。為此統計在不同噪聲環境下、注入不同偏差的突變故障后,故障檢測統計量的統計均值(50次蒙特卡洛仿真),如表1所示。此時2種算法的故障檢測閾值仍為39.34,若故障檢測統計量的均值超過故障檢測的閾值,表示此時故障檢測算法能夠較為可靠地檢出故障,對應的數值在表中用粗體表示。
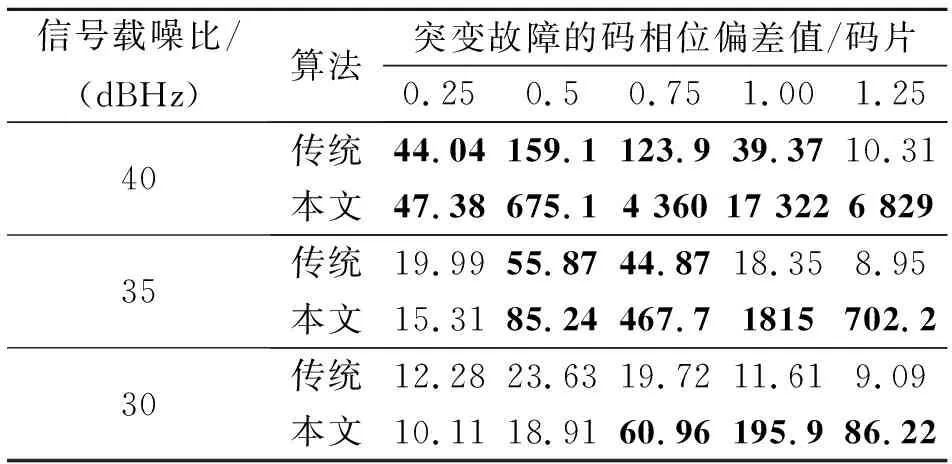
表1 不同噪聲環境下突變故障時故障檢測統計量的均值
在信號載噪比為40 dBHz時,傳統算法對1.25碼片的大偏差故障容易漏檢,本文算法可以檢出0.25~1.25碼片內的所有突變故障。隨著信號噪聲增大至35 dBHz,0.25碼片的小偏差故障容易被噪聲淹沒,傳統算法對大于0.75碼片的突變故障已經不敏感,本文算法則保持了對0.5~1.25碼片內突變故障的可靠檢測。當載噪比低至30 dBHz時,傳統算法對不同幅值的突變故障已基本無法區分,本文算法仍保持了對0.75~1.25碼片內突變故障的可靠檢測。
3.2 不同噪聲環境下的緩變故障檢測
本組實驗采用與3.1節類似的仿真環境,只是改為在20 s時向衛星PRN 11注入斜率為20 m/s的緩變故障。在不同噪聲環境下仿真實驗50次,統計傳統算法和本文算法對20 m/s的緩變故障從注入到告警平均所需時間及檢測成功率,如表2所示,其中檢測成功率定義為成功檢出故障的次數與總仿真次數的比值。
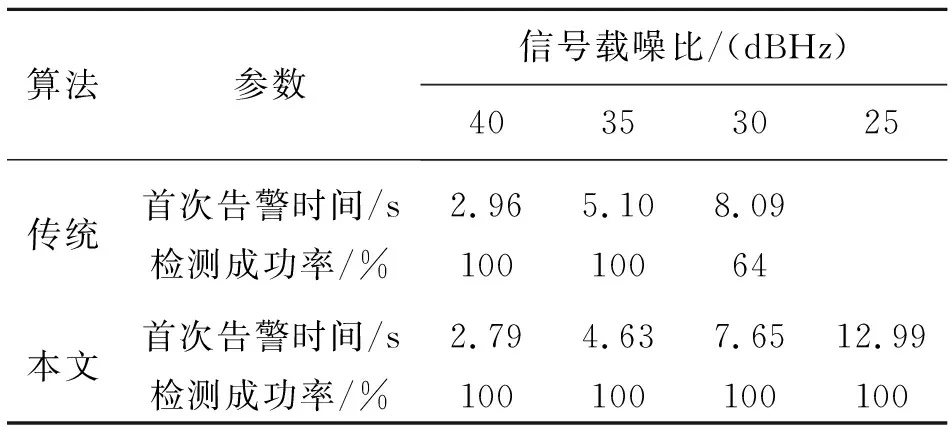
表2 不同噪聲環境下緩變故障檢測所需告警時間
可以看出,在40 dBHz時,2種算法對緩變故障的響應時間十分相近,當信號噪聲增大至35 dBHz時,2種算法的告警響應時間都有所增加,其中本文算法的平均告警響應時間略快于傳統算法。當信號噪聲增大至30 dBHz時,傳統算法只能保證64%左右的檢測成功率,本文算法可以在100%檢出故障的同時實現平均告警響應時間快約0.4 s。當信號噪聲增大至25 dBHz時,傳統算法完全失去了對20 m/s緩變故障的檢測能力。本文算法可以在告警響應時間有所增加的情況下以100%的檢測成功率檢出緩變故障。
4 結 論
本文提出一種基于故障檢測鑒別器的矢量跟蹤故障檢測結構,該故障檢測鑒別器對跟蹤通道中的碼相位偏差具有更大的正相關響應范圍,因而可以在強噪聲環境下對更大偏差的緩變和突變故障具有檢測能力。隨后利用三階球面-徑向容積準則計算故障檢測統計量,實現了強噪聲下的矢量跟蹤信號故障檢測。
在不同噪聲環境下對緩變和突變故障的故障檢測仿真實驗結果表明,本文算法在40 dBHz載噪比環境下具有與傳統算法相當的小偏差故障檢測能力,并能保持對0.5碼片以上偏差故障的可靠檢測。與此同時,算法能對強噪聲環境比如25~30 dBHz環境下的緩變故障保持一定的檢測能力。總體上,本文提出的采用故障檢測鑒別器的矢量跟蹤信號故障檢測算法提高了矢量跟蹤環路對較大偏差突變故障的檢測能力和其在強噪聲環境下的可用范圍。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年11期)2019-01-07 01:28:02
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
