車輛隊列行駛的空氣動力學性能研究進展
2022-05-10 09:19:12劉學龍王海洋王曉鳴
汽車實用技術 2022年8期
秦 青,劉學龍,王海洋,王曉鳴
(1.中汽研(天津)汽車工程研究院有限公司,天津 300300; 2.天津科技大學 機械工程學院,天津 300222)
汽車人均保有量的迅速增長在便利人們的生活的同時引發了能源緊張、交通事故頻發以及道路擁堵等問題。因此,節能減排、改善交通安全以及平衡道路通行流量已成為現代交通運輸業面臨的巨大挑戰。為解決這些難題,歐美及日本等諸多發達國家展開了智能交通系統的研究,其中車輛隊列行駛作為其中一個重要的組成部分,在實現交通運輸業的安全、高效和綠色發展等方面具有重大意義。
車輛隊列行駛技術始于20世紀80年代,是指多個車輛通過無線通訊方式進行信息融合,保持一定速度和間距行駛。該項技術的提出,不僅有效緩解了交通擁堵問題,還在提高運輸效率、減少交通事故等方面具有顯著作用,因此,該項技術受到更廣泛地關注。研究人員在該領域的研究熱點主要集中在隊列的信息融合技術和智能駕駛輔助技術等幾個方面。近幾年,隨著計算機技術和流體力學在汽車行業的快速發展,逐漸有人開始研究隊列行駛的空氣動力學性能。這對于提高車輛隊列行駛的穩定性、操縱性和燃油經濟性具有重大意義。
車輛隊列行駛空氣動力學性能的研究是一個復雜多變的問題,如圖1所示,根據其組成結構可以分為車輛、隊列和環境三部分,這三部分相互獨立又彼此關聯。因此,研究隊列行駛的空氣動力學性能不僅需要關注單個車輛的影響因素,還需要關注整個隊列的組成結構對整體空氣動力學性能的影響,同時還需要根據不同的行駛環境,對隊列結構進行實時的調節。這些復雜多變的影響因素導致車輛隊列行駛的空氣動力學模型具有非線性、強耦合、非完整約束等特點,導致其理論模型異常復雜,從而成為一個不易解決的難題,阻礙了車輛隊列行駛的應用與發展。因此,研究不同因素對空氣動力學性能的影響規律,對構建相對完善的隊列行駛空氣動力學模型,具有重要的理論研究意義和工程應用價值。
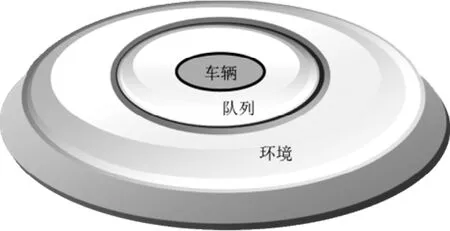
圖1 隊列行駛的組成結構
本文以隊列空氣動力學性能的影響因素為主要研究對象,根據影響因素的來源進行歸納分類,主要包括隊列內部因素和隊列外部因素兩個方面。如圖2所示,隊列內部因素包括車輛和隊列結構兩部分,其中,車輛的影響因素主要為車輛造型和行駛速度;隊列結構的影響主要體現在車輛數量、間隔距離、隊列形式等。而隊列外部因素主要是指環境變化造成的影響,根據因素類型的不同,可以分為自然環境和道路環境兩種,其中自然環境是指尤其天氣變化等原因產生的雨天、大風、側風、氣旋等因素;而道路環境主要是指隊列行駛通過橋梁、隧道、懸崖、建筑群等環境時產生的流場變化。在不同時期,研究人員通過采用風洞試驗、道路試驗或數值仿真等方法對不同因素產生的影響規律進行了研究。本文針對不同因素的研究內容和方法,總結和闡述了所得到的影響規律,旨在為了解隊列行駛的空氣動力學模型提供依據,為以后改善車輛隊列行駛的空氣動力學性能的研究方向提供參考。
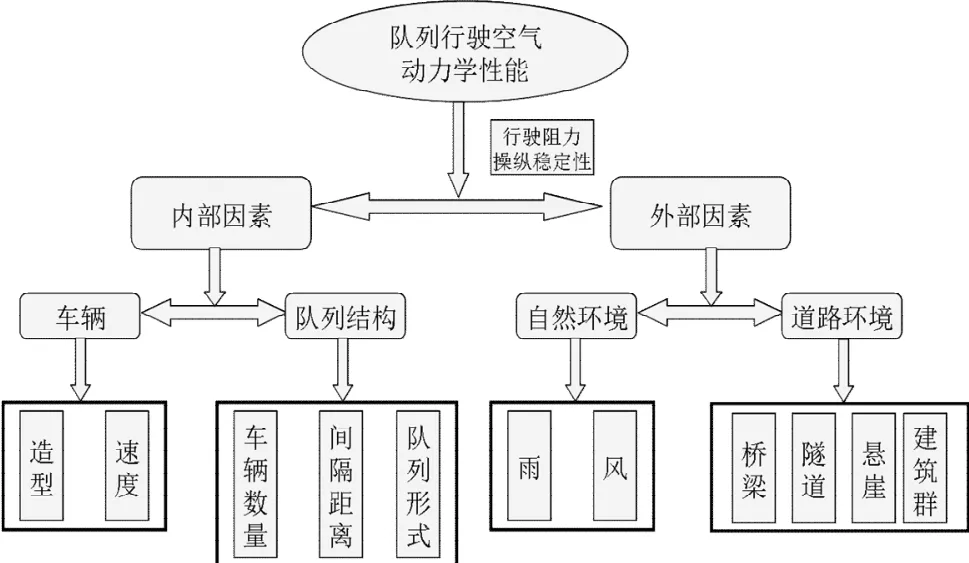
圖2 車輛隊列空氣動力學性能影響因素分類框架
1 行駛隊列內部影響因素研究進展
1.1 車輛自身狀態影響規律分析
車輛有很多自身狀態參數,如行駛速度、汽車質量、輪胎摩擦系數等等,其中與空氣動力學性能直接相關的參數主要包括行駛速度和車輛造型兩個因素。車輛空氣動力學的研究歷史悠久,主要是針對單個車輛的空氣動力學性能進行分析,研究成果頗豐。在車輛隊列行駛中,車輛自身狀態對隊列空氣動力學性能的影響分析是廣大研究人員最先開展的領域之一。
1.1.1 車輛行駛速度影響規律分析
車輛在道路上行駛時,克服氣動阻力的功率是發動機所做功中較大的一部分,如式(1)所示。對于相同的車輛,其所受空氣阻力與車速的二次方呈正比,消耗功率與車速的三次方呈正比,因此,隨著車速的增加,氣動阻力和消耗于氣動阻力的功率也迅速增加。研究表明,當車速為80 km/h時,氣動阻力與滾動阻力幾乎相同;當車速為 150 km/h時,氣動阻力約為滾動阻力的2~3倍。因此,車輛行駛速度對隊列行駛的空氣動力學性能具有重要影響。
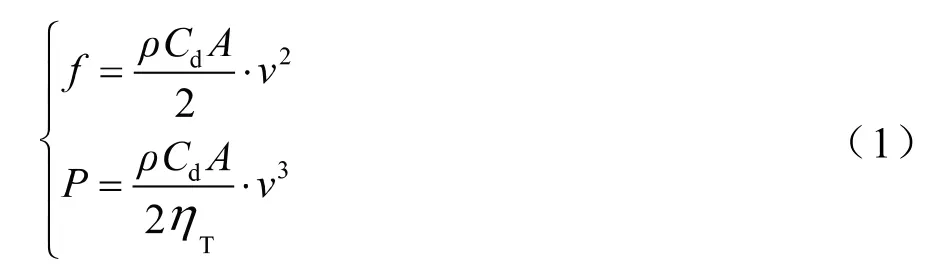
式中,為車輛所受空氣阻力;為車輛克服空氣阻力所需功率;為空氣密度;為車輛的阻力系數;為車輛的正投影面積;為車輛的行駛速度;為車輛傳動系效率。
李姝紅以階背式DrivAer模型為研究對象,模型如圖3所示,研究了兩車間距為1倍車長內,頭車和跟隨車輛節油率隨速度變化規律,如圖4所示。當車速在16 m/s~34 m/s變化時,頭車節油率約為0.7%~1.8%,跟隨車節油率約為2.6%~5.8%,平均節油率約為1.6%~3.8%。

圖3 階背式DrivAer模型示意圖[30]
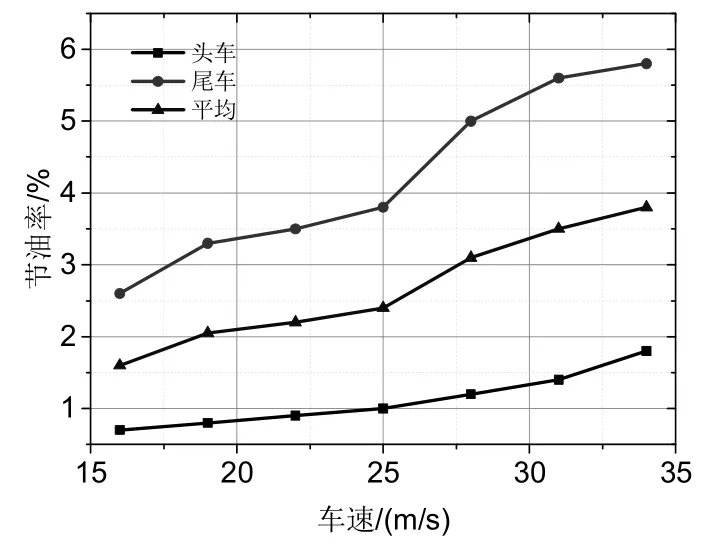
圖4 階背式DrivAer模型節油率隨車速變化關系圖[30]
由圖4知,頭車的節油率在低速情況下,速度的增加幅度不高,對車速的敏感性不高;但是,隨著車速的繼續增加,對車速的敏感性呈現突增,整體的節油率與車速的平方成正比。對于尾車,車速對節油率呈現不規則的影響,近似于多段對數關系;存在幾個臨界車速(該模型中為25 m/s),在臨界車速附近,節油率對車速的敏感性將會發生突變,因此,對于乘用車來說,隊列行駛時需要提前規劃經濟安全速度,該速度建議高于臨界車速。
BONNET等人以商用車為研究對象,對兩車間距6 m~14 m以內不同速度下的燃油消耗進行研究,當車速分別為60 km/h和80 km/h時車輛的節油率如圖5所示,其中頭車節油率約為4%~8%,跟隨車輛節油率約為15%~20%。通過以上研究可知,隨著車速的增大,對隊列行駛頭車和跟隨車輛的節油率均有不同程度的提升,且隊列行駛形式對后車的節油率影響更加顯著。
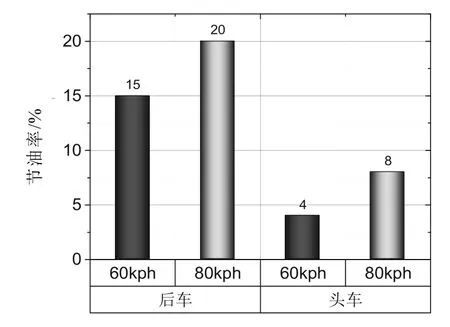
圖5 頭車和尾車在不同速度下節油率變化圖[31]
通過對比圖4和圖5可以看出,商用車在列隊行駛中節油率要比乘用車更加明顯,商用車的節油率對速度的變化也更加敏感,因此,推行商用車的列隊行駛,將對節能環保具有重大意義。
1.1.2 車輛造型影響規律分析
行駛中的車輛所受氣動阻力的主要組成部分為壓差阻力,其中車身前端壓差阻力約占9%,車身尾部壓差阻力約占91%,且當車身長度發生變化時,該比值也會相應產生變化。根據氣動阻力形成機理,渦流阻力約占壓差阻力40%左右,它的大小主要取決于車輛尾部流場結構。當車輛成隊列行駛時,后車會進入前車尾流區,相鄰車輛間的外流場會產生相互影響,尤其是不同造型車輛所產生的尾部流場結構存在較大差異,因此,會對隊列整體氣動性能產生不同影響。
賀寶琴等人以階背式、快背式和直背式SAE模型為研究對象,探究了不同造型車輛氣動性能隨車輛間距變化規律,三種車輛隊列平均減阻率DR與車輛間距和車輛長度比值之間變化規律如圖6所示,其中,階背式轎車隊列平均減阻率約為30%,快背式轎車隊列平均減阻率約為17%,直背式轎車隊列平均減阻率約為24%。在一倍車長間距內,不同造型車輛平均減阻率均有較明顯改善,且階背式和直背式轎車整體減阻效果更佳,因此,針對不同造型車輛進行隊列行駛控制策略制定時,需考慮不同造型對隊列整體氣動性能的影響,以獲得整體最佳效果。
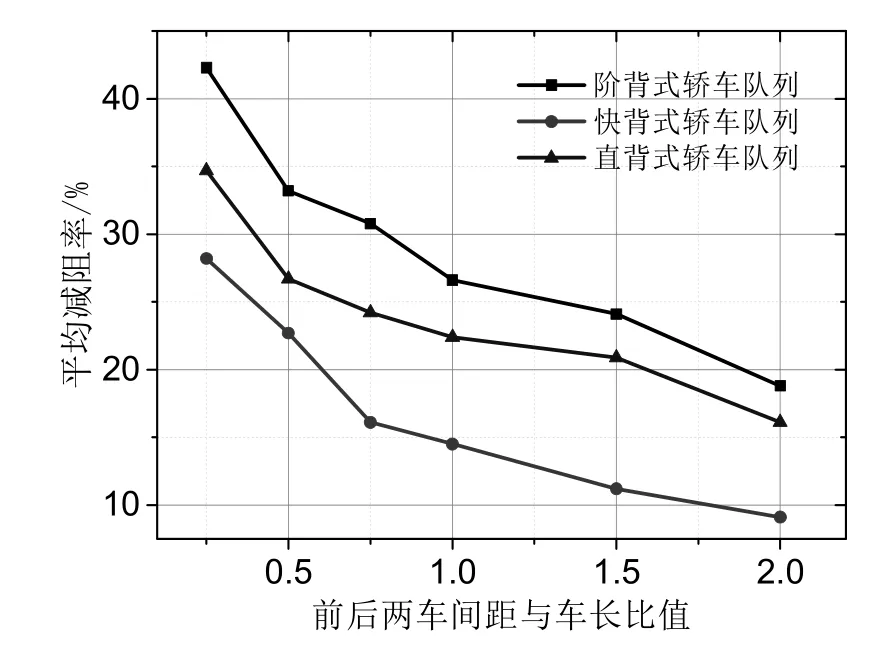
圖6 三種SAE造型車輛隊列減阻率隨車輛 間距變化關系圖[34]
此外,文中對階背式單車和隊列中任一車輛的尾流結構進行研究,以揭示隊列行駛的減阻機理。如圖7和圖8所示,階背式轎車單車尾流中包括上下兩個反轉渦流且強度較大,當車輛呈隊列行駛時,尾渦中上下兩個渦流和為一體且強度有所降低,因此,隊列中車輛的氣動阻力系數一定程度的降低。
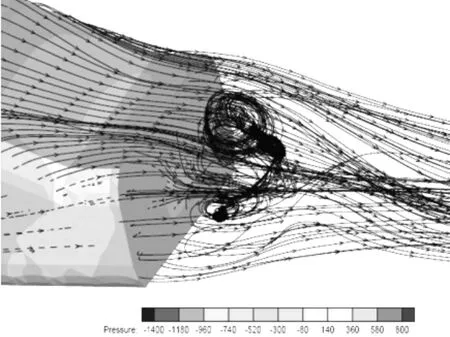
圖7 階背式轎車單車尾流結構[34]
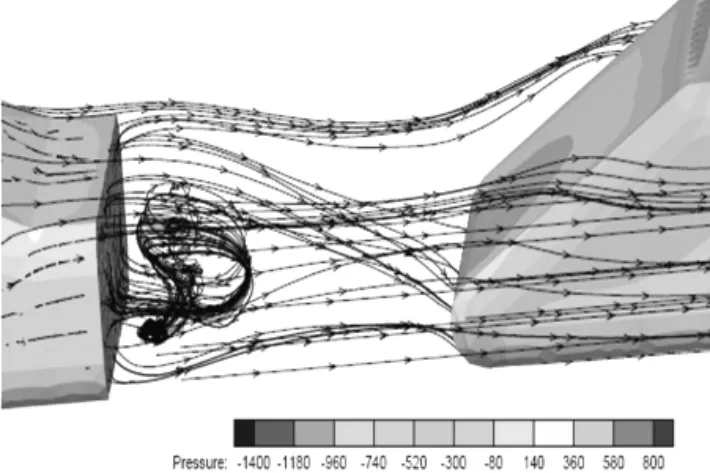
圖8 階背式轎車隊列行駛時車輛尾流結構[34]
SCHITO等人以背部角度為0°和30°Ahmed模型為研究對象,所用幾何模型如圖9所示。研究發現背部角度0°Ahmed模型在以0.25倍車長間距至6倍車長間距隊列行駛時,風阻系數均有不同程度降低;背部角度30°Ahmed模型僅在車輛間距為0.5倍車長內略有降低,當車輛間距大于0.5倍車長,風阻系數基本無降低,部分間距下風阻系數甚至略有變化。為進一步對產生以上結果的原因進行研究,對背部角度0°和30°Ahmed模型的尾部流場結構進行分析,背部角度0°Ahmed模型車輛尾渦較大,在隊列行駛時,車輛相互之間流場結構易產生積極影響,使整體的氣動性能獲得優化,背部角度30°Ahmed模型車輛尾渦較小,在隊列行駛時,車輛相互之間流場結構會產生不良影響,導致整體氣動性能不能改善或產生惡化,因此,對于類似0°Ahmed模型的商用車,其在進行隊列行駛時,改善整體氣動性能,進而降低油耗。
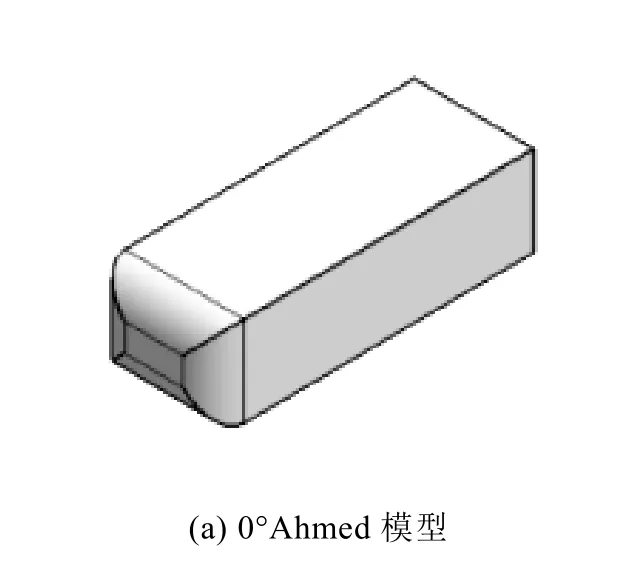
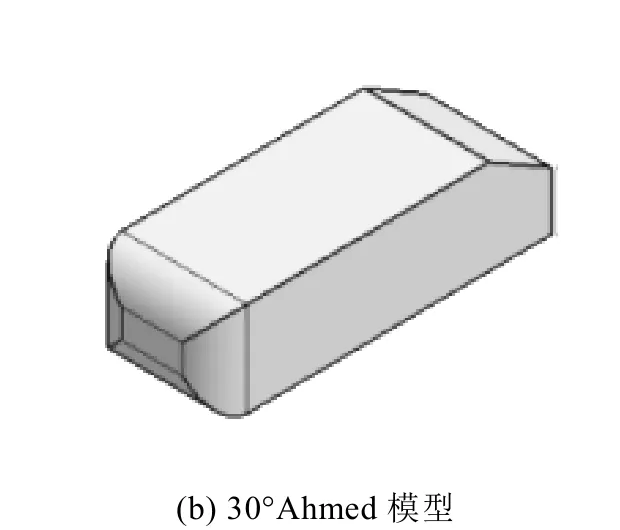
圖9 Ahmed 幾何模型[35]
同樣,為了驗證造型尾部結構對隊列行駛時氣動性能的影響,GEOFFREY等人以Windsor模型為研究對象,該模型幾何如圖10所示。研究所用三種模型的背部角度分別為0°、10°和25°,以模擬不同的尾部流場結構。通過對三種造型車輛不同排列組合形成的27種隊列進行研究發現,車輛造型及不同造型車輛所處位置均對隊列整體氣動性能產生不同影響,受車輛尾部角度影響,隊列整體風阻系數降低程度不同。其中,隊列整體降阻最佳組合為頭車背部0°模型、中間及尾部車為背部25°模型,各車及整體平均降阻分布如圖11所示,整體降阻效果最差組合為頭車背部25°模型,中間及尾車為背部0°模型,各車及整體平均降阻分布如圖12所示。此外,隊列中部分車輛風阻系數與單車相比并未降低。
圖10 Windsor模型幾何模型[36]
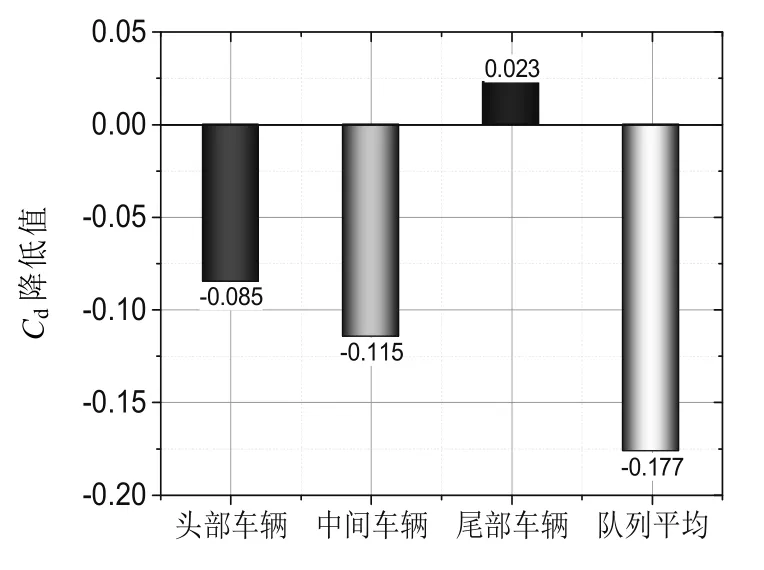
圖11 Windsor模型最佳降阻組合隊列各車及 平均降阻分布圖[36]
通過以上研究可看出,當不同造型車輛進行隊列行駛時,造型對隊列的氣動性能會產生不同的影響,為獲得整體最佳氣動性能狀態,需采用不同的優化控制策略對不同造型車輛位置分布等進行調節。
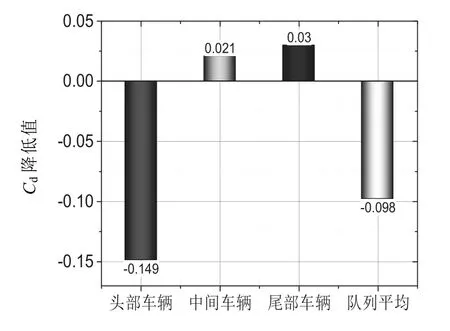
圖12 Windsor模型最差降阻組合隊列各車及 平均降阻分布圖[36]
根據目前研究成果,自身風阻較大車輛在隊列行駛時,整體風阻性能會有不同程度改善,而自身風阻系數較小車輛在隊列行駛時,整體風阻性能會存在惡化風險。為進一步研究低風阻車輛隊列行駛時氣動性能變化規律,GEOFFREY等人又以低風阻“MSM”模型及基于“MSM”改造的多種不同造型模型組成的隊列進行研究,圖13為模型造型,其中(a)為“MSM”模型,(b)—(d)為基于“MSM”調整后模型。
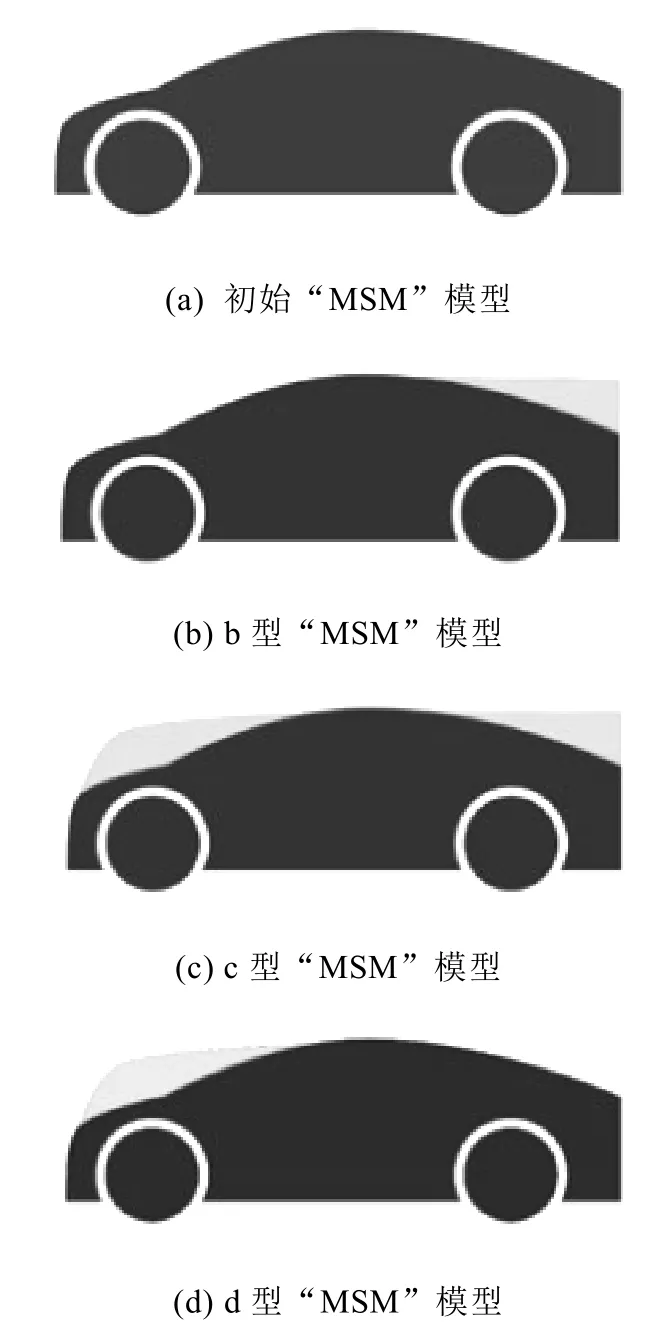
圖13 “MSM”及“MSM”調整模型幾何模型[37]
GEOFFREY等人通過研究發現,自身風阻系數較小的車輛成隊列行駛時,單車及整體氣動性能容易惡化,如圖14所示,以4輛“MSM”模型組成的隊列,頭車及各跟隨車輛風阻系數均有不同程度增大。通過風洞試驗中的煙流試驗可看出,如圖15,對于該類車型,其呈隊列行駛時,前車尾流直接作用于后車頭部區域,導致其正壓顯著增大,因此,整體風阻系數增大。為改善隊列整體氣動性能,需對不同位置處車輛造型進行一定調整。

圖14 “MSM”隊列各車風阻系數變化分布圖[37]
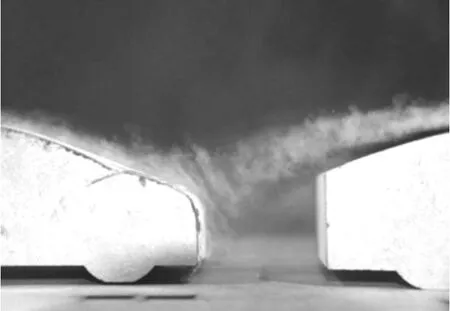
圖15 “MSM”模型風洞煙流試驗
通過對多組隊列進行研究,發現最佳降阻組合隊列形式如圖16所示,其中頭車為b型“MSM”模型,中間三輛車為c型“MSM”模型,尾部車 輛為d型“MSM”模型。隊列中各車輛風阻系數變化分布如圖17所示。該隊列中,通過對頭車尾部結構進行改型,避免頭車尾流向下流動直接沖擊跟隨車輛頭部,跟隨車輛頭部及尾部通過改型可引導氣流盡量緊貼隊列上方流動,當氣流流動至隊列尾部,僅需要對車輛頭部進行改型,尾部結構對氣流進行引導,防止其分離嚴重,進而導致整體風阻系數增大。

圖16 基于“MSM”調整最佳隊列組合示意圖[37]
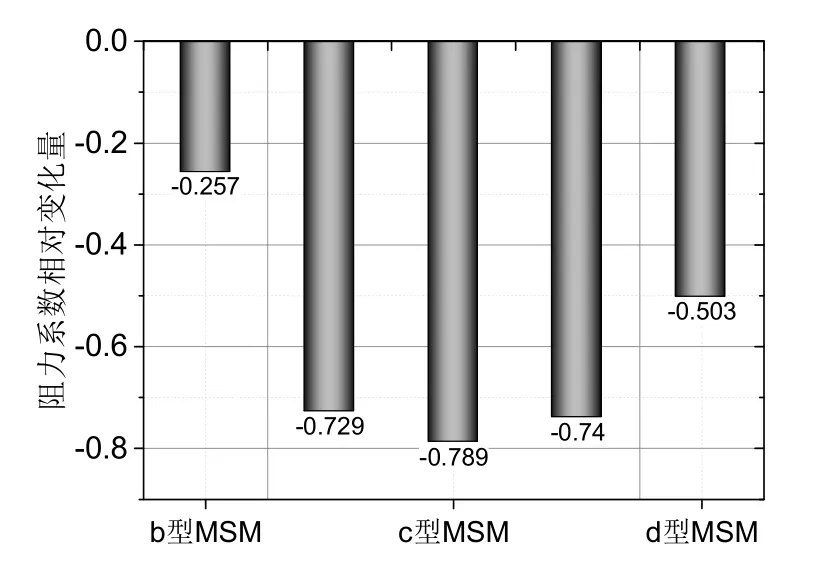
圖17 最佳降阻組合隊列各車風阻系數變化分布圖[37]
以上成果為當下車輛造型設計和隊列行駛技術研究提出了新的方向,如果低風阻車輛以隊列形式行駛,整體風阻性能容易有惡化趨勢,只有通過對跟隨車輛造型進行實時調整才能保證車隊整體風阻性能得到優化,因此,為保證未來車輛進行隊列行駛時空氣動力學性能處于較優狀態,車輛的設計必然需要考慮較多可主動控制部件或一定的變形能力。
1.2 隊列結構狀態影響規律分析
在智能交通環境下,為最大程度發揮隊列行駛模式的積極作用,不僅需要對單車自身狀態進行調整,隊列結構對整體氣動性能的影響也具有顯著影響。隊列結構狀態對整體氣動性能的影響因素主要包括隊列中車輛數量、車輛間隔距離以及隊列形式,其中,隊列形式主要是指乘用車和商用車等不同車型在隊列前后及左右分布狀態。
1.2.1 車輛數量影響規律分析

圖18 隊列平均風阻系數與車輛數目、 間距之間變化關系[38]
智能交通系統如何能夠根據道路通行車輛數目制定實時控制策略,對于實現隊列行駛模式下燃油經濟性的提升具有重要影響。通過研究不同 車輛數目對隊列整體氣動性能影響的變化規律,可為智能交通實時控制系統提供理論支撐依據。ZABAT等人采用1/8轎車模型進行風洞試驗,研究了等車速下兩車、三車和四車隊列行駛時風阻系數與車輛數目之間的變化規律,如圖18所示,在相同車輛間距下,隨著車輛數目的增加,隊列平均風阻系數可降低10%~35%。
傅立敏等人以階背式SAE模型為研究對象,通過計算流體力學(Computational Fluid Dynamics, CFD)技術手段研究了車輛數量對隊列氣動性能影響的變化規律,如圖19所示,在固定車輛間距下,隨著車輛數目的增加,隊列平均風阻系數可降低20%~30%,且隊列中間位置車輛的風阻系數最低。受限于仿真或試驗資源,現在尚未開展數量較大的隊列行駛研究,根據目前研究成果可看出,當隊列中車輛數量增加時,整體平均風阻系數均有不同程度降低,當車輛數目大于4輛時,整體風阻系數變化趨勢不再顯著。隨著將來仿真計算能力的提升和智能網聯技術的進一步發展,需要開展車輛數目更為龐大的仿真計算或道路試驗,為將來隊列行駛技術的大規模應用提供理論基礎。
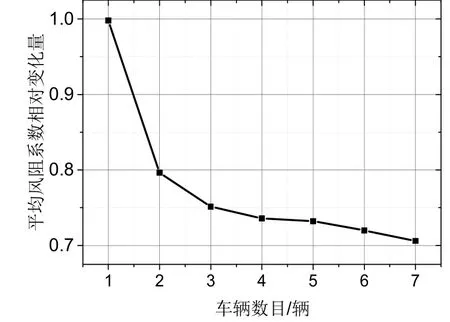
圖19 隊列平均風阻系數與車輛數目之間變化關系[39]
1.2.2 車輛間距影響規律分析
對于車輛隊列的空氣動力學性能,當后車進入前車的尾流區域,兩車流場相互產生影響時, 隊列整體的氣動性能才會發生改變。PATRICK等人用兩輛實車進行道路試驗,隊列平均風阻系數隨車輛間距變化如圖20所示,隨著車輛間距的降低,隊列平均風阻系數可降低15%~38%。
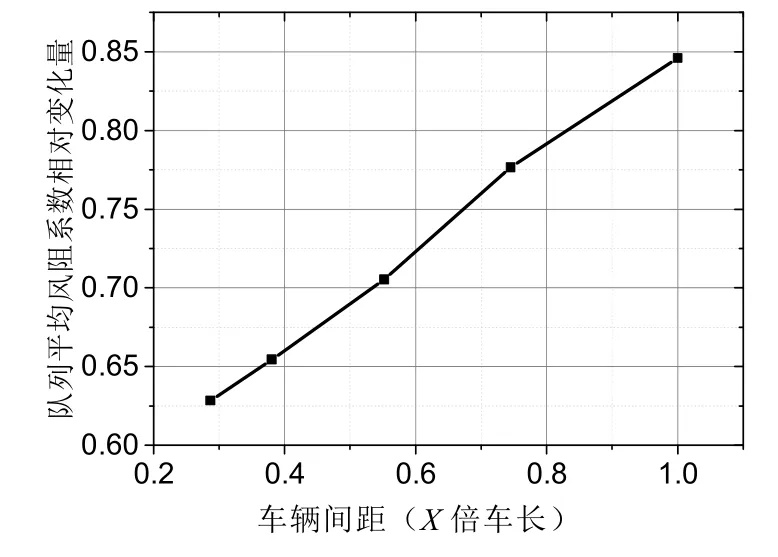
圖20 隊列平均風阻系數隨車輛間距變化關系圖[40]
王靖宇等人以階背式MIRA模型為研究對象,通過CFD技術手段,研究了三車隊列等間距和非等間距對隊列整體空氣動力學性能的影響。在等間距工況下,風阻系數隨車輛變化規律如圖21所示,隨著車輛間距的減小,隊列平均風阻系數可降低0.015 1至0.032 8。在非等間距工況下,平均氣動阻力仍有所降低,且后兩車距離的改變對中間位置車輛的影響較大。
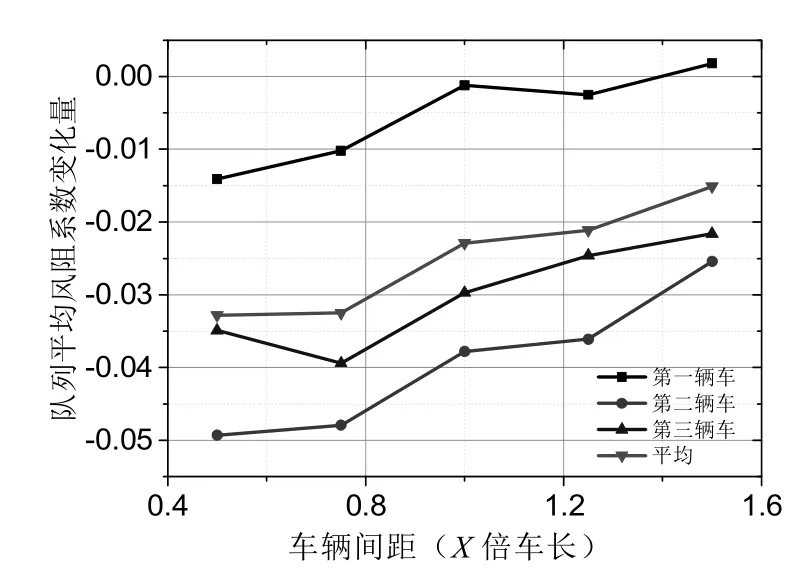
圖21 隊列車輛風阻系數隨車輛間距變化圖[41]
圖22和圖23分別為等間距和不等間距情況下,隊列行駛的三輛車車頭前部的壓力分布曲線,當車輛相對位置不同時,三車壓力分布均相似,且后車與前車相比,其正壓區的壓力值有了一定程度的降低,從而使跟隨車輛受到的氣動阻力降低。
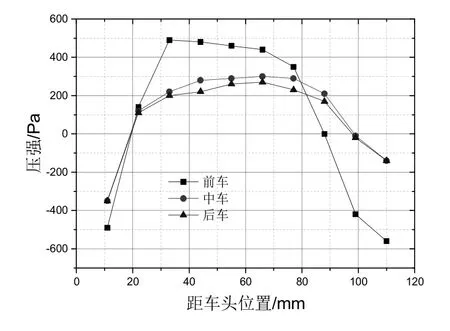
圖22 等間距隊列各車頭前部壓力分布曲線[41]
基于目前已有研究成果,對于乘用車隊列,間距在0.5~2倍車長以內,隊列平均風阻系數可降低10%~20%。因此,在隊列行駛時,為保證整體具有良好的節油效果,在保證安全行駛的前提下,應盡量縮小兩車跟隨距離。
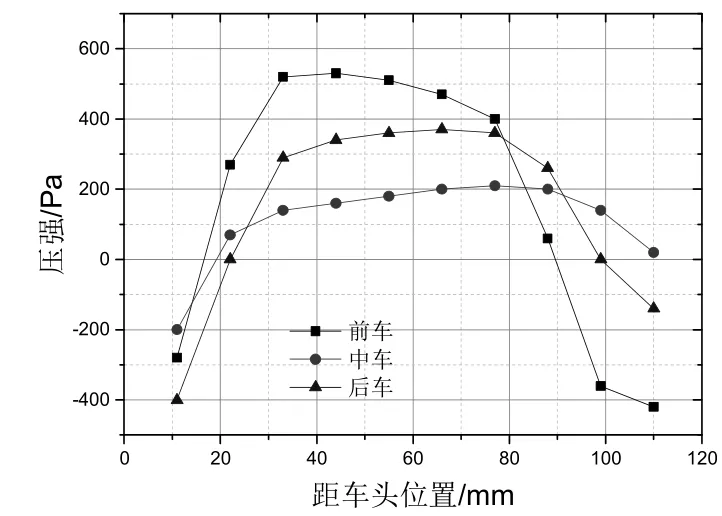
圖23 不等間距隊列行駛時,各車頭前部壓力分布曲線[41]
對于商用車隊列,BROWAND等人在2000年—2004年對基于空氣動力學性能的商用車隊列節油率變化規律進行了大量探索,以兩車隊列為研究對象,當車輛間距為3 m~4 m時,隊列平均節油率約為11%,當車輛間距為8 m~10 m時,隊列平均節油率約8%,其中當車輛間距分別為4 m和10 m時,頭車及跟隨車節油率變化規律如圖24所示。
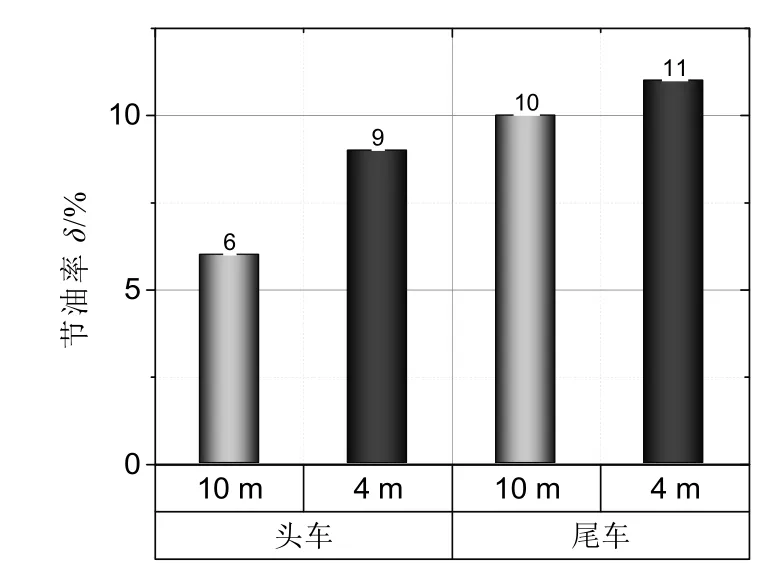
圖24 商用車兩車隊列頭車及尾車燃油消耗隨 車輛間距變化分布圖[42]
TSUGAWA等人在日本Energy ITS項目支持下也做了大量商用車隊列行駛研究,以三車隊列為例,空載狀態下隊列各車節油率隨車輛間距變化如圖25所示,當車輛間距為10 m時,隊列平均節油率約為13%,而相同間距下,車輛正常裝載時,隊列平均節油率約為8%。
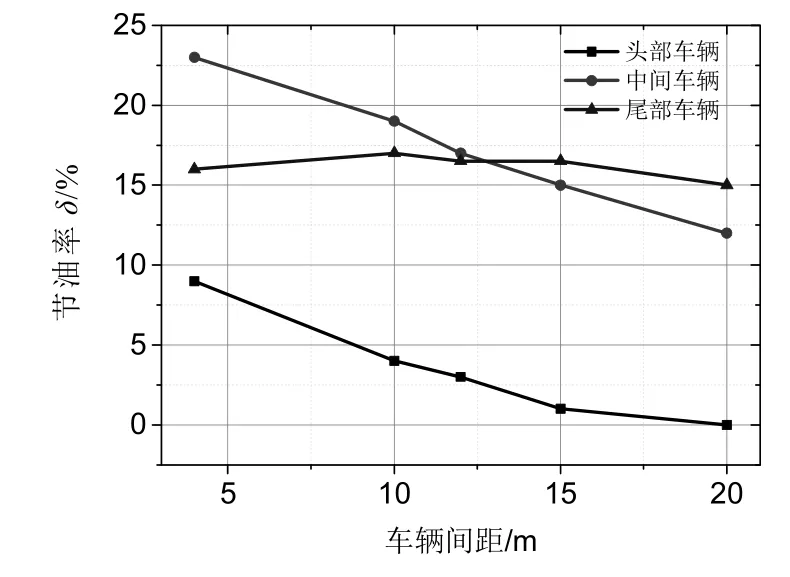
圖25 空載狀態下各車節油率隨車輛間距變化圖[43]
此外,由德國發起的CHAUFFEUR項目(1996—2004年)、KONVOI項目(2005—2009年)、美國PATH項目(1986年—)、日本Energy ITS 項目(2008年—)、加拿大發起的e TV項目(2013—2014年)等也分別開展了商用車隊列行駛時,隊列燃油消耗隨車輛間距變化規律的研究。基于現有技術成果,商用車隊列行駛間距在8 m~10 m以內時,頭車節油率約為6%左右,跟隨車節油率約為14%左右,隊列的平均節油率大約為10%左右。
1.2.3 隊列形式影響規律分析
在未來智能交通環境下,車輛隊列的組成會包括多種形式,除單一的乘用車、商用車隊列,在實際道路行駛時,更多的是由不同類型乘用車和商用車組成的混合車型隊列。與單一車型組成的隊列相比,商用車和乘用車組成的混合隊列其氣動特性變化更加復雜,且需要耦合考慮的影響因素更多。
SCHITO等人以卡車、階背式轎車、緊湊型轎車和廂式貨車組成的三種不同隊列進行研究,隊列形式如圖26所示,其中隊列(a)依次為卡車、緊湊型轎車、階背式轎車;隊列(b)依次為廂式貨車、緊湊型轎車、階背式轎車;隊列(c)依次為階背式轎車、緊湊型轎車、廂式貨車。當車輛間距為0.5 m時,各隊列車輛風阻系數變化如圖27所示,當隊列頭車為正投影面積較大車輛時,跟隨車輛風阻系數降低幅度較大,當隊列頭車為正投影面積較小車輛時,跟隨車輛風阻系數降低幅度相對較小。
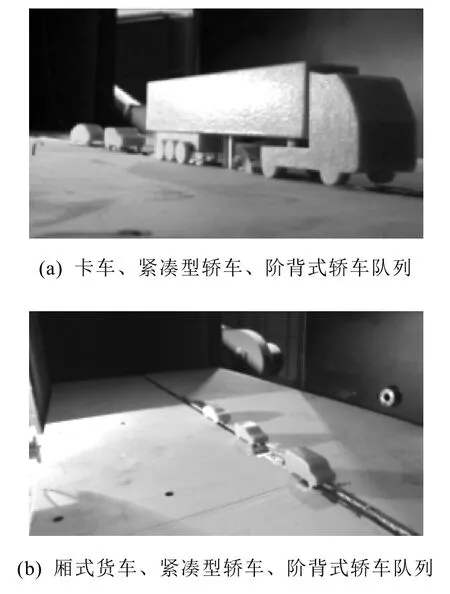
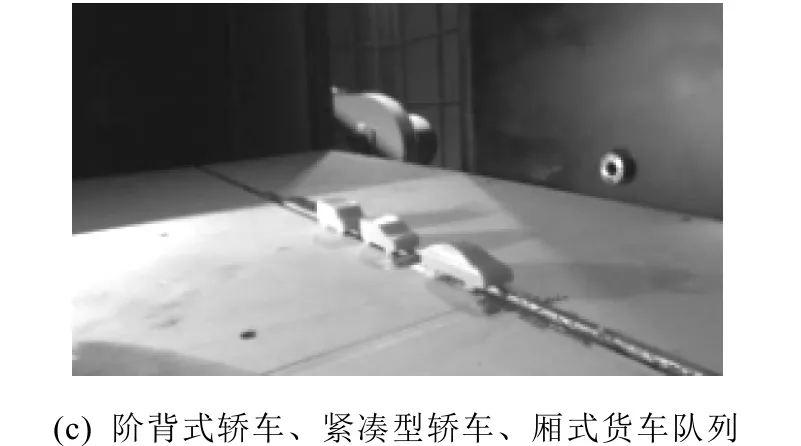
圖26 不同隊列形式組合示意圖[35]
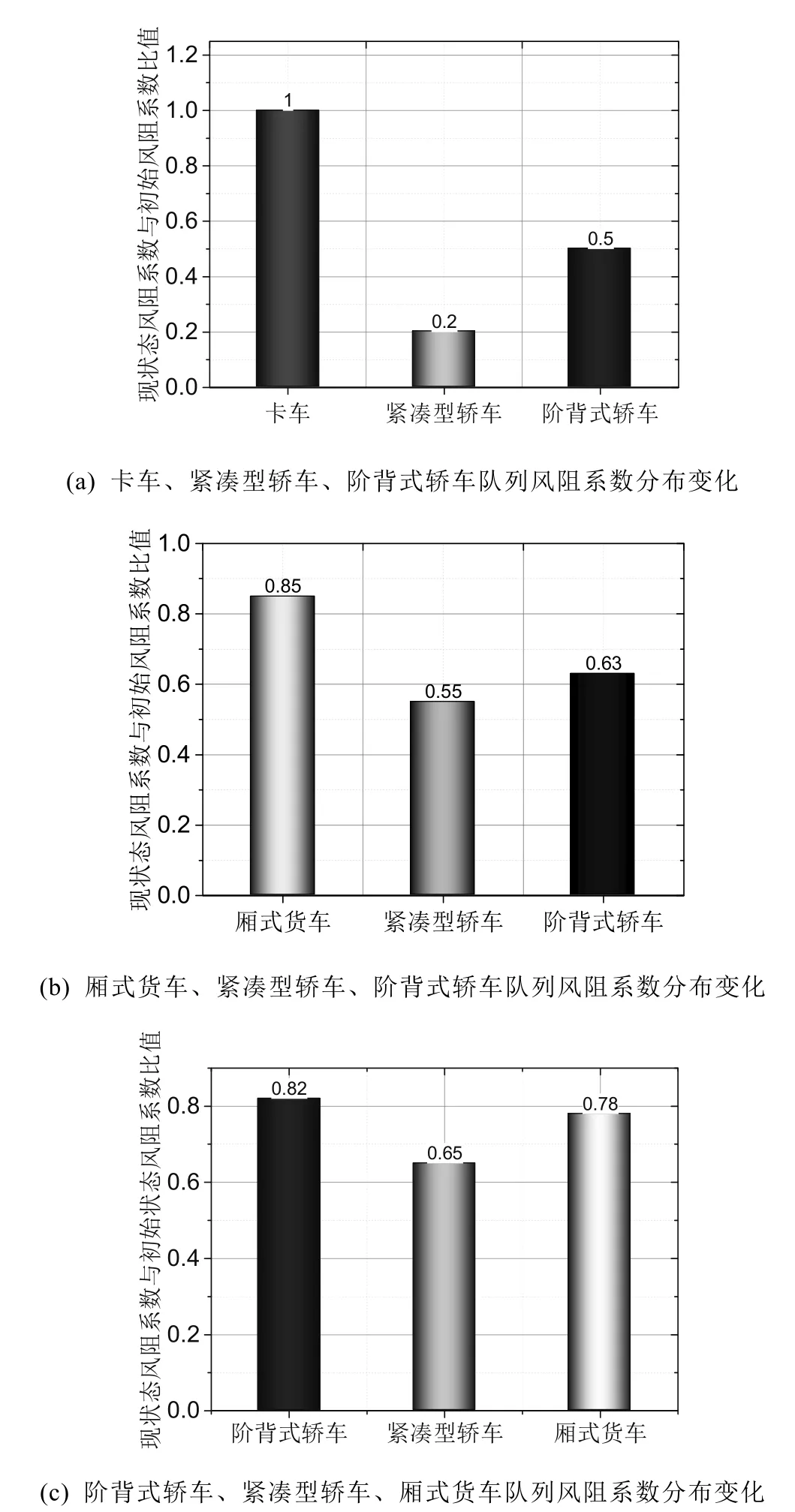
圖27 不同隊列形式各車輛風阻系數變化分布圖[35]
DAVILA等人以前兩車為商用車和后跟隨車為三輛乘用車組成的隊列為研究對象,探究了隊列各車節油率隨車輛間距的變化規律,如圖28所示,在5 m~15 m間距內,不同位置車輛的節油率均有不同程度的提升,且第四輛和第五輛車節油率變化規律較為相似。

圖28 隊列中不同位置車輛節油率隨車輛間距變化圖[49]
MCAULIFFE等人以重型、中型商用車、轎車以及SUV組成的單車道和雙車道不同隊列形式進行研究,各類型車輛比例模型如圖29所示,同時探究了不同隊列形式下重型商用車氣動套件(包括貨箱側裙板和尾部導流板)的減阻效果變 化規律,套件結構如圖30所示。在不同的隊列形式下,重商商用車風阻系數能降低1%~16%,且氣動套件最大能產生20%的降阻效果。
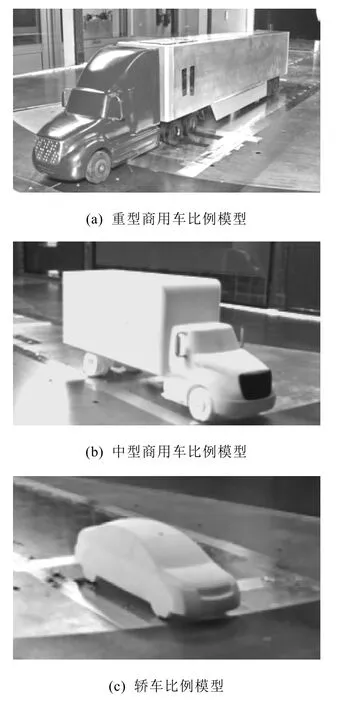

圖29 各類型車輛比例模型幾何示意圖[50]

圖30 重型商用車氣動套件結構示意圖[50]
谷正氣等人采用CFD技術手段,對轎車尾隨集裝箱貨車過程的流場結構進行分析,研究發現隨著兩車間距的減小,轎車風阻系數呈現先減小后增大的規律,如圖31所示,其中車輛間距為轎車長的整數倍距離,為轎車單車風阻系數,為轎車尾隨貨車時的風阻系數,當兩車間距為兩倍轎車長時,轎車風阻系數可降低25%左右,節油率約為13.7%。因此,對于轎車跟隨貨車工況,需選擇合適的車輛間距作為跟隨距離以獲得良好的節油效果。
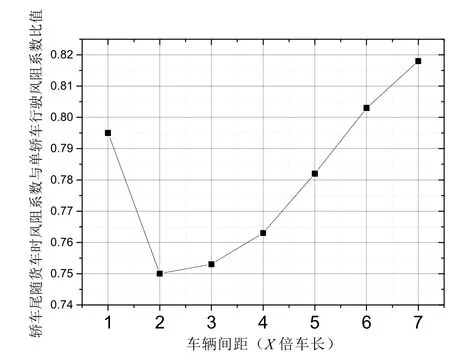
圖31 轎車尾隨貨車行駛時,車輛風阻系數隨間距變化圖[51]
對于未來智能交通環境下隊列行駛工況,從空氣動力學性能改善方向考慮,要綜合考慮不同類型車輛需以不同的隊列形式行駛,以保證隊列整體的氣動性能獲得改善。
2 隊列行駛外部影響因素研究進展
車輛隊列行駛時,周圍環境也會實時對其氣動性能產生重大影響。環境對車輛隊列行駛的影響主要來源于自然環境和道路環境。其中自然環境影響主要為自然狀態下,由于空氣流動所形成的風對車輛氣動性能所產生的影響。自然風的流動方向及湍流狀態均具有強烈的非定常性,對車輛產生的影響也具有較大的不確定性。道路環境的影響主要為自然風在遇到障礙物時,其風向、大小等產生變化后,對車輛氣動性能所產生的影響,上述障礙物包括自然環境中的山體、丘陵、人工環境中的隧道、橋梁、隔離帶、高層建筑物以及突然發生的超車會車等。車輛在受到以上環境因素影響時,很容易發生側滑、橫擺、甚至側翻等失穩現象,進而影響到車輛的操縱穩定性及行車安全。
2.1 自然環境影響因素分析
自然環境產生的氣流具有強烈的非定常性,通常采用風譜特征對其進行描述,而風譜特征的獲得則需借助統計學。因此,自然環境對車輛氣動性能影響的研究難度較大,通常需要做一定的假設或簡化。
隗海林等人以CFD技術手段,研究了車輛間距和側風來流角度對隊列風阻系數和節油率變化的規律,在0°~20°來流角度范圍內,頭車和跟隨車節油率隨來流角度變化規律如圖32所示,通過研究表明前車節油率受側風影響較小,而后車節油率受側風影響較大,當側風來流角度為20°時,與無側風相比,后車節油率降低15.55%,為更直接明了的對車輛間距、側向風和風阻系數之間的關系進行說明,文中繪制了三者之間關系的三維圖,如圖33所示,間距較小時,前車對側風敏感性較高,隨著來流角度和車距的增大,風阻系數變化不再顯著,但整體仍較高,后車對來流角度和車距的敏感性均較高,因此,在有側風工況下進行隊列行駛時,需多關注跟隨車輛行駛狀態,通過調整車速、車輛間距等,以提升跟隨車輛節油率。
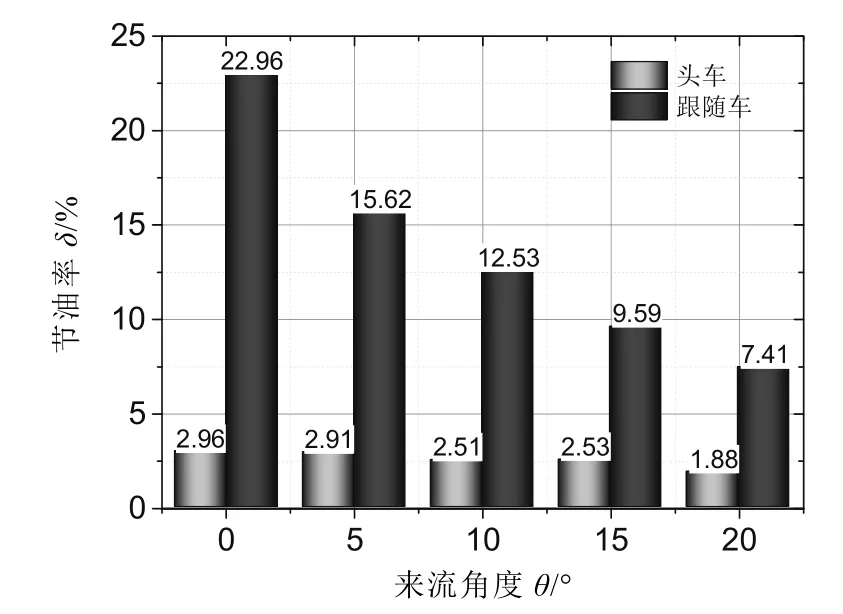
圖32 隊列中頭車和跟隨車節油率隨來流角度變化圖[57]
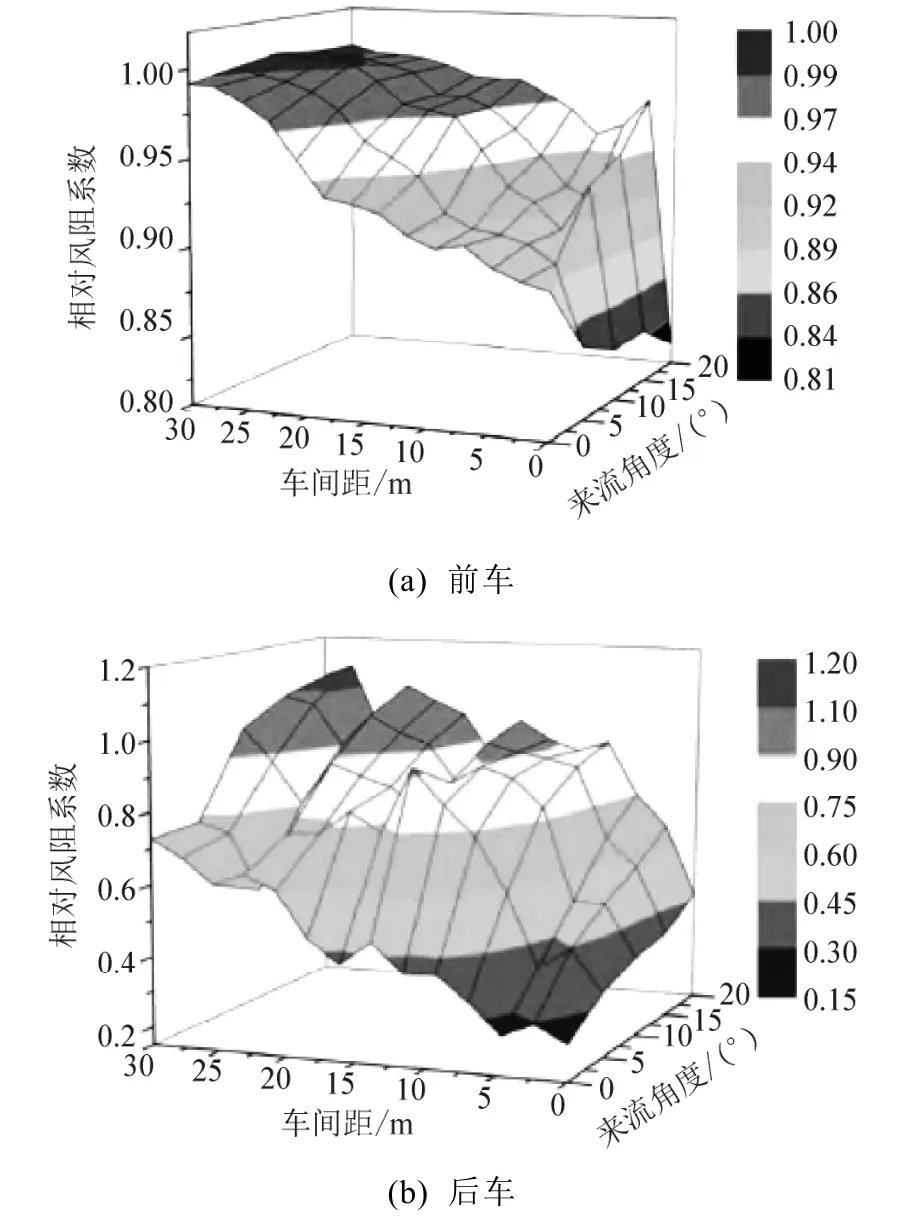
圖33 兩車間距、來流角度及相對風阻系數關系圖[57]
VEGENDLA等人對兩車在同車道跟隨行駛及相鄰兩車道跟隨行駛時側風對隊列氣動性能的影響進行研究,車輛相對位置如圖34所示。通過對橫擺角0°和±6°下前后車輛的節油率進行平均,可得出頭車和跟隨車輛平均節油率隨車輛間距變化,如圖35和圖36所示。
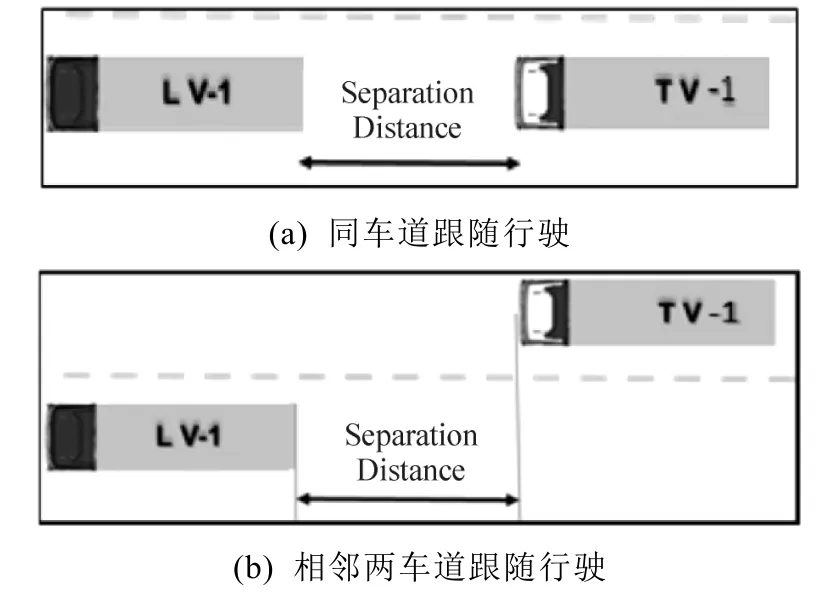
圖34 車輛相對位置示意圖[58]
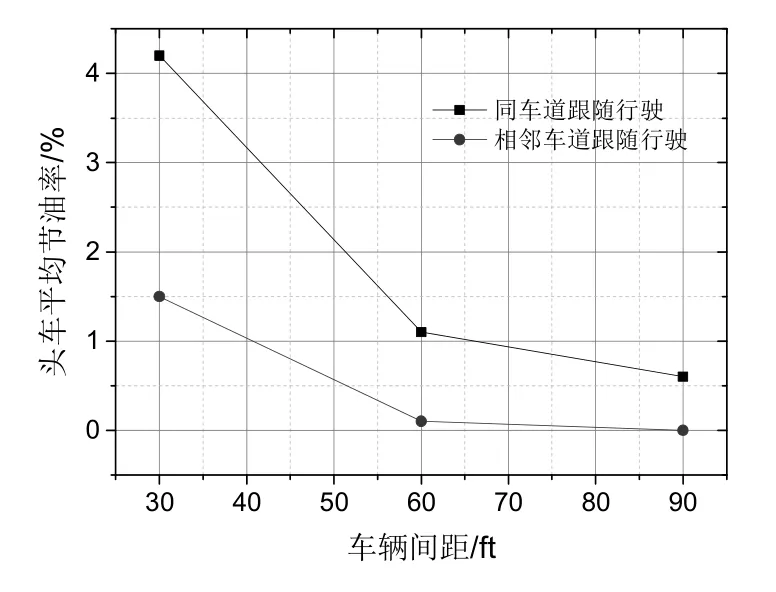
圖35 頭車不同偏航角下平均節油率隨車輛間距變化圖[58]
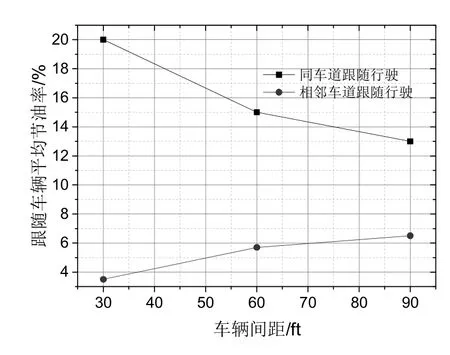
圖36 尾車不同偏航角下平均節油率隨車輛間距變化圖[58]
根據圖35和圖36所示,同車道跟隨行駛對于頭車和跟隨車平均節油率均有一定提升,但隨著車輛間距的增大,平均節油率均有不同程度降低,這與無橫擺角時節油率變化規律一致,相鄰車道跟隨行駛時,各車平均節油率均大幅下降,但隨著車輛間距增大,跟隨車輛節油率則會產生小幅度提升,此外,通過對車輛相鄰車道跟隨行駛時外流場進行分析,當車輛產生橫擺時,兩車流場相互影響顯著,尤其當橫擺角為6°時,前車氣流分離對后車影響較大,導致整體風阻系數增大。因此,在側風工況下行駛時,相鄰車道車輛應盡量保證較大車輛間距,這對提升行車安全和節油效果會產生不同程度影響影響。
GHEYSSENS借助CFD的手段對GETS模型進行研究,模型如圖37所示,探究了側風工況對不同車頭圓角半徑下隊列氣動性能的影響。
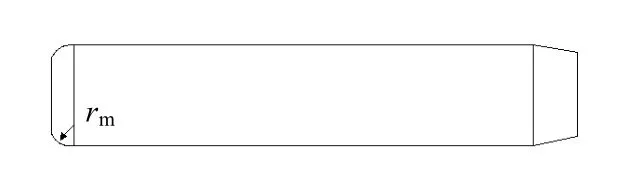
圖37 GETS模型示意圖[59]
如圖38和圖39所示,在不同車頭圓角半徑下,側風對隊列中各車氣動性能影響不同,側風對大車頭圓角半徑中間車輛影響較小,對頭車和尾部車輛影響較大。對于小車頭圓角半徑車輛,側風對隊列中不同位置車輛影響均較大。因此,為提升隊列車輛側風穩定性,在設計車輛造型時,可考慮適當增大車頭迎風部位圓角半徑。
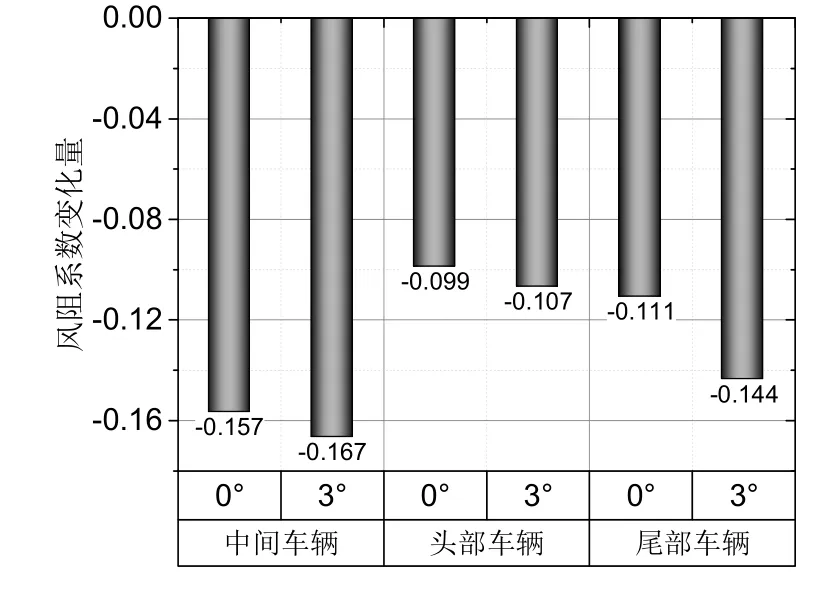
圖38 R=0.135 m時隊列各車輛風阻系數隨 橫擺角變化圖[59]
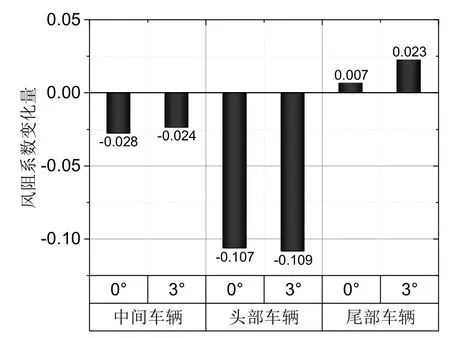
圖39 R=0.27 m時隊列各車輛風阻系數隨橫擺角變化圖[59]
然而,自然環境中風的流向和大小均是實時進行變化的,對隊列車輛產生的影響也是一個動態變化的過程。目前受限于計算機硬件及軟件技術限制,研究多針對單車工況,對車輛在受到瞬態側風時的氣動特性和車輛動力特性進行耦合計算,得出瞬態側風作用下,風與車輛之間實時的相互作用以及產生的影響,隨著未來計算技術及風洞測試技術的發展,通過運用大規模計算資源,獲得瞬態側風對隊列氣動性能動態影響的變化規律,對指導實際道路環境下,隊列如何對環境風進行感知并作出相應相應具有重要意義。
2.2 道路環境影響因素分析
車輛在道路行駛時,除受到自然風的直接影響,當其遇到障礙物時,其風向和大小均會產生不確定的變化,當其作用在車上時,對車輛的氣動性能又會產生不同的影響。對于復雜道路環境下車輛的空氣動力學性能研究起步較晚,研究內容主要集中在橋梁、隧道以及高層建筑等建筑物對車輛的氣動性能影響和超車、會車對車輛的氣動性能影響。
李莉等人對廂式貨車在兩車并列、尾隨進入隧道過程等多種情況下的瞬態空氣動力學性能進行研究,如圖40和41所示當兩車并列行駛時,風阻系數和側向力系數均有增大,尾隨行駛時,前車和后車的風阻系數則均有不同程度降低側向力系數則在小范圍內振蕩變化。
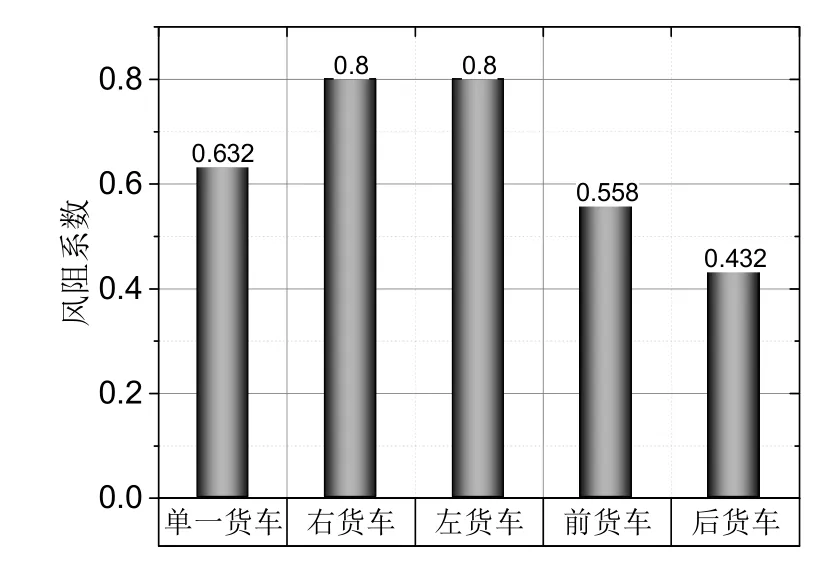
圖40 車輛不同相對位置行駛時各車輛風阻系數分布圖[68]
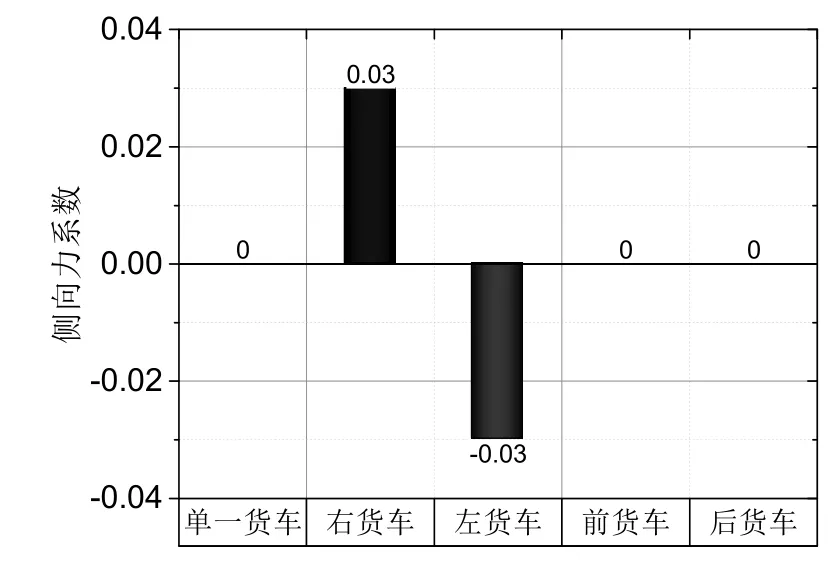
圖41 車輛不同相對位置行駛時各車輛 側向力系數分布圖[68]
當兩車并列行駛至隧道口及進入隧道過程中,兩車風阻系數和側向力系數均發生劇烈變化,兩車并列行駛時,前方正壓區域增大,后部尾流相互干擾,導致整體風阻系數增大,當兩車尾隨行駛通過隧道時,前車尾流對后車車頭正壓區域產生作用,使后車正壓區壓力減小,后車風阻系數產生一定程度降低,因此,對于多車進出隧道時,應盡量避免兩車并列行駛工況,采用隊列尾隨形式通過隧道并保持適宜車輛間距,這對于提高整體氣動性能和行車安全均均有重要意義。
AHMED等人通過風洞試驗對兩車并列行駛和超車過程中的氣動力變化進行研究,在兩車并列行駛及超車過程中,車輛周圍流場的變化會導致兩車產生一定的側向滑移趨勢,整個過程中兩車所受側向力及橫擺力矩均會產生一定變化,因此,為保證車輛的行駛安全,需保持一定的橫向及超車間距。
TSUEI等人對單車超車4車隊列過程中的氣動性能變化進行研究,超車車輛與隊列相對位置如圖42所示,研究發現超車車輛與隊列之間橫向間距、相對速度及車輛造型均對兩者之間的氣動性能有顯著影響,在單車超過隊列行駛過程中,隊列中各車風阻系數均有顯著增大,且側向力方向不斷發生變化。當單車與隊列之間相對速度減小時,隊列中各車所受氣動力均有所增大。因此,從空氣動力學的角度研究車輛隊列行駛技術不僅對提高燃油經濟性有著重大意義,對研究其操穩性和安全性也能夠提供重要參考。
圖42 單車經過四車隊列相對位置示意圖[70]
通過眾多研究結果研表明受道路環境影響形成的瞬態風對車身所受氣動力和力矩會產生顯著影響,這主要是由于瞬態風速度梯度變化較大,對于行駛中的車輛而言,其作用變化也非常明顯,進而導致車輛在行駛過程中出現失穩現象。由于環境對車的影響較為復雜,目前研究成果主要集中在單車或兩車方面,因此,在不同環境下進行隊列行駛時,隊列-環境-風之間的動態耦合計算以及對相互之間動力學響應的判斷也將會是隊列行駛技術的研究重點。
3 發展趨勢與展望
縱觀國內外基于空氣動力學性能的車輛隊列行駛技術研究成果,車輛隊列行駛時,車與車之間以及車與環境之間的相互作用均對其整體的氣動性能有著顯著影響。合理的隊列行駛規劃不僅能有效提高車輛的燃油經濟性,對其操縱穩定性和安全性的提升也具有顯著影響。然而,隊列行駛技術的工程化應用仍舊面臨巨大的挑戰,本文針對車與車之間影響和環境與車之間影響兩個方面存在的難題提出以下解決途徑。
3.1 隊列內部因素研究展望
根據前人研究結果,車輛隊列行駛時,車與車之間的影響因素繁多,在實際應用時存在較多困難,可總結為以下兩點:第一,待輸入影響因素繁多,包括隊列中車輛數目、間距、速度、造型、相對位置等;第二,預測困難,即如何對大量信息進行融合與規劃響應。針對以上問題,目前還沒有較好的解決方案。然而從仿生學角度來看,車輛隊列行駛時車輛布局與自然界中某些自然群體行為(如鳥類遷徙、螞蟻覓食以及魚群洄游等)有著極高的相似度,這些自然群體規模不定,然而其群體行為卻具有較強的靈活性、并行性以及穩定性,這主要是依靠個體根據收集的信息對自身行為進行實時調整,最終實現群體的智能化行為。因此,群智能作為新興的研究領域已應用于諸多學科,群智能算法具有參數少、運算速度快、全局搜索能力強等若干優勢。隊列行駛技術為包含多變量的非線性規劃問題,通過引入群智能算法對車輛隊列行駛進行建模以及參數和編碼方式的設計,以此獲得最優隊列行駛參數。群智能算法為解決這類高維多目標的優化問題提供了新的解決途徑。
3.2 隊列外部因素研究展望
車輛在實際行駛時,所處環境通常是復雜而多變的,對環境信息的感知情況將直接對其自身行駛狀態的判斷產生影響。目前車輛對環境的感知主要依靠雷達、攝像頭、多傳感器融合以及基于深度學習的圖像特征提取等手段,然而以上感知技術只能對障礙物、行人車輛、交通標志等信息進行識別與判斷,無法對氣體的流動狀態以及其對車輛的作用狀況進行感知和預測。而前人研究成果表明車輛周圍氣流狀態的感知和氣動力對車輛產生作用效果的判斷對其氣動性能的提升有著重要作用。但是,車身周圍流場結構具有較為復雜的特征,且隨著環境的變化而實時變化,無法通過數學模型進行表征,因此在對流場進行準確感知方面,目前存在較大的技術難度。然而,在自然界中,許多動物擁有人類所不具備的流場感知能力,其通過對流場信息的感知,可實現獵物的識別定位和追蹤、在全黑暗環境下形成周圍流場水動力學圖像以及在非穩定環境下,出色地完成飛行或游動等行為。車輛在道路上行駛時,周圍是實時動態變化的流場,因此,從感知周圍流場信息入手,通過研究對流體流動的感知方法,獲得實時環境信息后對車輛隊列進行調整,使其能更好地適應環境,從而實現車輛隊列的空氣動力學性能最優狀態。
4 結論
隨著測量技術、控制技術以及計算機等技術的快速發展,基于空氣動力學性能的車輛隊列行駛研究經歷了從簡單試驗結果的闡述到流體流動機理的剖析,研究內容涵蓋了車與車和環境與車之間的各類影響因素,并得到相應的變化規律,為將來隊列行駛技術的實際應用提供了一定的理論研究基礎。然而實際道路環境是復雜而多變的,前人的研究均進行了一定假設和理想化條件的設置,因此,接近道路真實工況的車輛隊列行駛研究將會時未來的研究熱點,本文從仿生學的角度,提出了研究車與車和環境與車之間影響因素可采取的研究思路,為后續基于空氣動力學性能的車輛隊列行駛研究提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19