城鎮立面改造項目測繪的新技術應用實踐
2022-05-09 02:08:28李照永侯至群何江龍
城市勘測 2022年2期
關鍵詞:系統
李照永,侯至群,何江龍
(昆明市城市地下空間規劃管理辦公室,云南 昆明 650041)
1 引 言
2 原理及關鍵技術
Pegasus:Backpack移動背包掃描系統是徠卡測量系統發布的全新移動實景測量背包,它集成了定位定姿系統和數據采集系統。配置了5個相機和2個激光掃描儀,結合了GNSS技術、慣導技術(INS)和實時定位與地圖構建(SLAM)技術[1],具備真正意義上的融合導航定位功能。其中GNSS可接收目前全球可用的四大衛星系統導航定位信號,IMU可修正在背負獲取數據過程中的身體晃動姿態誤差,SLAM會對在采集過程中無GNSS或GNSS信號弱的環境的軌跡進行優化,可使用于各種復雜導航定位需求環境[1]。“水平+垂直”雙激光掃描儀能實現全方位、無接觸、快速、高精度地對建筑物或其他實體目標進行三維彩色點云數據的采集[3]。
2.1 INS技術
慣性導航系統(Inertial Navigation System),即INS技術,是一種利用陀螺和加速度計測量載體角運動和線運動,經過積分運算求出載體瞬時姿態、速度和位置的導航技術。它完全依靠自身的敏感器件完成導航任務,無須依賴任何外界信息,也不向外輻射任何能量,是一種完全自主的導航系統,具有數據更新率高、短期精度高和穩定性好的特點。慣性導航體系歸于推算導航方法,即從一已知點的方位依據接連測得的運動體航向角和速度推算出其下一點的方位,因而可接連測出運動體的當前方位[11]。
2.2 SLAM技術
SLAM技術(Simultaneous Location and Mapping)是一種在測量環境的同時獲取在該環境中位置信息的方法,實現了在無GPS信號的環境下進行位置測量,將它與移動測量相結合實現了各種復雜環境下地理信息數據的獲取[11]。SLAM技術無須初始化,開機后可由操作員背載采集設備在測區范圍內進行掃描,大大提升了點云處理的效率。所以基于實時定位與地圖構建的移動測量技術具有掃描效率高,數據精度高的特點[11]。SLAM技術的理論模型如圖1所示。
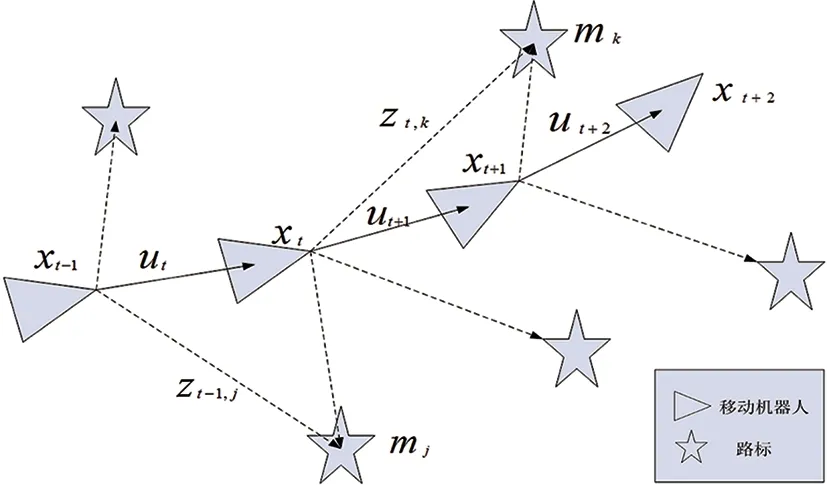
圖1 SLAM理論模型
3 數據獲取與處理
3.1 項目概述
本次應用研究的目的是為某縣城立面改造區提供精細的立面基礎數據,滿足舊城立面改造設計需求。測區分布于峽谷地帶,呈帶狀分布,是典型的喀斯特地貌。城鎮樓宇多建于山坡,街道狹窄,建筑物間距窄小,且樹木遮擋嚴重,通視條件差。這樣的客觀環境下,傳統作業方式和一般架站式三維激光掃描儀實測困難,難以滿足舊城立面改造項目數據需求。測區范圍示意如圖2所示:

圖2 測區范圍示意圖
3.2 數據獲取方案設計與準備
根據項目立面改造設計的具體要求收集相關資料,并到實地去勘察測量現場,了解測區計劃軌跡路線的沿線對空條件,分析軌跡路線不同對空條件下的數據獲取模式和方法,計劃采用的方法和基準站設置位置等,房屋的平面位置定位、門、窗臺等關鍵要素應在路線規劃范圍內能完整獲取,并以掃描盲區最少為原則確定合理的最終移動背包掃描路線軌跡,制定數據掃描和處理方案[3]。
(1)在控制點上架設基準站并進行靜態觀測,其中基站距離測區最遠不宜超過 5 km,但條件不具備時可通過增設基站數量的方法進行優化。GNSS接收機采樣間隔需為1秒,基站須為多星座系統,并使基站和測區整體走向相對垂直,保持堅強的幾何圖形結構。此外,基站采集時間必須完全覆蓋背包任務的采集時間[9],且宜架設在已知WGS-84準確經緯度的控制點上[3]。
(2)選擇采集區域內對空條件良好位置進行設備的靜態和動態初始化。將背包放置在平地上,設備主機和控制平板開機,打開平板中的Redmin Viewer遠程桌面軟件進行傳感器及系統激活;檢查控制軟件參數設置及參數變化情況至完成初始化與系統調試[1]。
創業教育在促進創業意愿和幫助有創業精神的公民進一步發展方面發揮了重要作用。Asliza et al.(2016)針對農業企業家教育,從農業這個角度出發,旨在探討農業創業教育對馬來西亞農業學生的創業傾向和創業意向的影響,結果初步表明地方高校提供的農業創業教育對學生創業技能和創業意向的培養有充分的促進作用,深刻揭示了創業教育的重要性。
3.3 數據獲取
數據獲取主要包括:靜態校準、動態校準、獲取數據與下載,工作流程為:靜態校準→動態校準→獲取數據→動態校準→靜態校準→數據整理下載[1]。
(1)靜態校準。在設計點位進行設備系統安置,結合點位的GNSS觀測環境要求及實地條件確定校準時間長度,通常不少于5分鐘,本次實踐項目地處低洼山谷地區,觀測條件一般,選擇平均校準時間為20分鐘,每個位置再依據點位情況將觀測時間適當延長。此部分工作類似GNSS靜態相對定位數據的獲取,數據質量與點位選擇有著至關重要的聯系。
(2)動態校準。在系統完成靜態校準后,緩慢背起背包進行動態校準初始化,即慣性導航糾正。背起背包后不能轉身,直接快速走直線至INS status(IMU激活的狀態)為INS Aligning后開始以順時針或逆時針方向走方形,每走1分鐘停5秒,然后變換繞行方向,當INS status為INS Good狀態時,動態校準工作完成。此時,還可適當延長動態校準時間,進一步修正和提高慣性導航的精度。
(3)獲取數據與下載
由于背包系統的背負載體為技術人員,載體的姿態相對穩定程度、實時觀察路徑環境并控制行走速度、依據控制程序參數變化情況適時做零速校正都較為關鍵,也是決定獲取數據質量的關鍵因素。本次應用實踐采用fused SLAM方法模式[3],主要過程為:對空條件較好的起始位置Start REC→一般對空條件緩慢行走→對空條件較差或室內無GNSS信號時在兩端處分別做零速校正,校正的時間依據GNSS系統與IMU實時的匹配精度做參考→對空條件較好的起始位置Stop REC→分軌跡獲取起點……→Deavtivate[4]。
數據獲取完成后應及時完整地將項目文件內全部數據下載,包括背包系統數據及基準站數據下載[4]。
3.4 數據處理
數據處理主要包括:拷貝原始掃描數據、添加基站數據、解算模式與參數設置、軌跡解算、SLAM解算與軌跡優化、點云生成及成果輸出等[1]。
(1)數據添加與預處理。首先采用GNSS配套數據處理軟件將基站靜態觀測歷元數據進行格式轉換,導出通用格式數據(Rinex 3.0及以上),并拷貝至背包系統獲取數據工程文件目錄。其次采用Inertial Explorer軟件將基站數據和背包POS數據等進行轉換成Pegasus Manager軟件可識別數據格式[10],并對必要解算條件進行檢查。
(2)軌跡解算。軌跡解算在軟件Inertial Explorer中進行。在添加基站數據時須確定精確的基準站經緯度和橢球高,并采用WGS-84坐標系統;然后檢查基站天線類型和儀器高。最后通過添加背包POS數據完成軌跡的初始解算,解算后的局部軌跡線圖如圖3所示。

圖3 測區局部解算軌跡圖
(3)SLAM解算。初始軌跡解算完成之后,使用Pegasus Manager軟件的SLAM processing模塊進行SLAM的解算,首先進行SLAM的時間檢測,后在SLAMQC Tool中進行分層平面化處理、檢查SLAM質量、編輯SLAM時間和重新計算SLAM等工作;SLAM處理后,使用Multipass進行重復路段的匹配。當軌跡路線存在GNSS觀測環境不良或無GNSS信號時,應依據情況進行多次解算,將軌跡質量優化至最佳,才能得到精度優良的成果[3]。
(4)點云的生成與成果輸出。檢查和分析軌跡文件,無異常并達到最優效果后,在Pegasus Manager軟件環境逐一設置參數和選項(可依據工作需要進行全景照片的處理選擇),就可掛機自動解算和成果輸出,成果點云、全景照片等成果資料輸出后,應做必要檢查,包括點云厚度、分層情況等,如質量不佳,還可再次返回SLAM解算階段再次進行分段軌跡優化[3],直至成果達到預期要求。輸出的三維彩色點云局部數據如圖4所示:
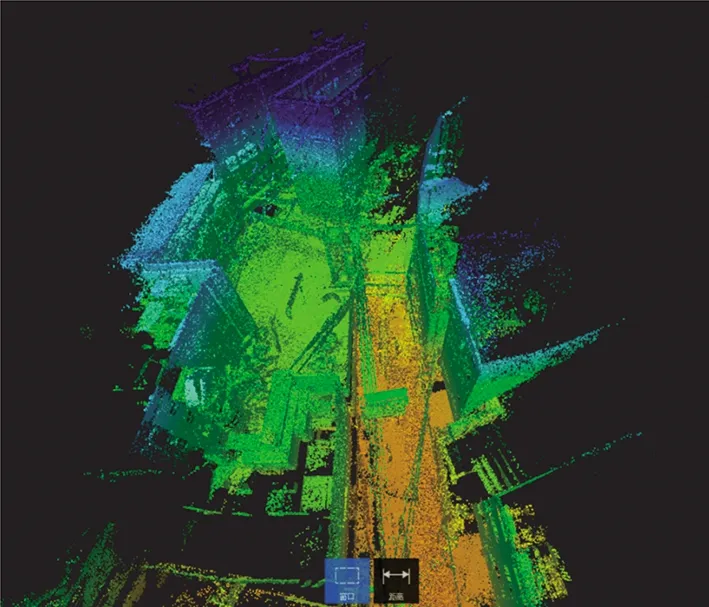
圖4 局部點云
3.5 數據去噪與輸出
點云數據噪聲來源于掃描設備本身、人員操作、目標實體表面材質和采集環境等因素,作業所得的海量點云不可避免存在或多或少的噪點和離群點,嚴重影響最終的數據直觀度、應用和建模效果。故此,采集所獲的海量數據并不適合直接使用,點云去噪已然成為點云數據應用之前不可或缺的工作[8]。可采用點云后處理軟件Autodesk ReCap的點云編輯及智能清理功能,運用人機交互的方式去除冗余點和噪聲點[4]。選取局部點云去噪情況如圖5所示:
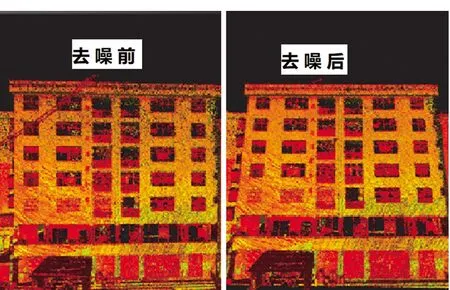
圖5 局部點云去噪處理
4 立面圖繪制與應用
建筑物立面圖主要包含建筑物表面的外貌和外部結構信息、建筑各部分垂直方向的高度,外部裝飾造型等等。依據原始點云數據,采用Undet軟件,結合Sketch Up強大的三維單體模型構建能力,通過數據預處理將原始點云數據處理后進行立面圖的繪制和三維模型的建立,實現建筑物表面的紋理和結構特征精確呈現[7]。
4.1 數據導入與特征提取
生成的*.las、*.pts、*.rcs等格式點云數據可通過Undet插件在Sketch Up直接導入,借助Undet插件的點云數據特征點、線、面拾取功能,特別是平面特征提取與平面交線特征提取兩種特征提取功能,對建筑物各特征數據逐一提取。由于點云數據量十分龐大,可通過拉伸限制框的大小減少點云數據的顯示,以此達到節約計算機內存資源的目的,并可提高操作速度和刷新速率[4]。如圖6所示兩棟樓房的立面點云導入數據。
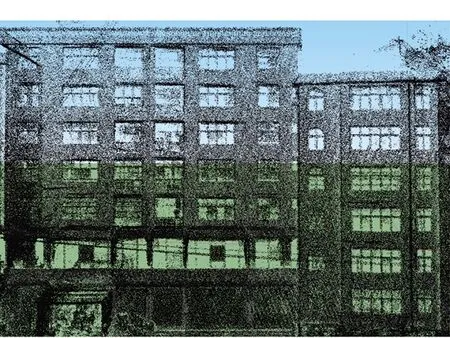
圖6 局部立面點云導入數據
4.2 立面繪制
在Undet for Sketch Up環境中正射顯示,然后依照建筑物的立面特征,提取特征點,描繪出建筑物的特征線,或者利用Undet角線提取功能逐一獲得建筑物特征點、線、面,還可利用Sketch Up平臺軟件的強大三維構建功能進行面操作,可方便繪出建筑物的立面圖或者立面三維模型。為了能夠對建筑物的特征點進行準確、全面的拾取,可參照背包系統一同生成的全景照片顯示的建筑物外貌特征同步操作,這樣可繪制出精細的、較高精度的立面圖形[5],如圖7所示兩棟樓房的臨街一側立面矢量數據。

圖7 局部臨街一側立面矢量數據
4.3 立面圖應用
在Undet for Sketch Up環境中繪制完成立面圖后,可導出DWG矢量圖形數據文件直接交付委托方進行設計,也可通過紋理映射功能及插件對三維模型進行紋理貼圖進行立面改造后的效果展示。還可通過測區現場拍攝的數碼影像、遙感影像等信息對三維模型進行紋理映射貼圖,進行改造前后的效果對比分析[7]。如圖8所示改造前局部立面模型。

圖8 局部立面模型
5 精度檢測與效益分析
5.1 精度檢測
為驗證成果數據的精度,進行了部分數據邊長檢測,利用經鑒定的鋼尺采用常規測量手段對建筑物立面尺寸進行抽查檢測,重點抽取樓房的臨街立面,從立面圖量取各特征點間邊長與檢測邊長作對比分析,邊長檢測互差中誤差為 ±1.8 cm,樓房高度大于 35 m的高空部分邊長檢測互差中誤差為 ±3.5 cm,精度良好,能很好地滿足改造設計需求,部分檢測數據如表1所示。

部分邊長檢測數據 表1
5.2 效益分析
(1)傳統測量方式只能獲得反光片或棱鏡所在位置的單點坐標,對棱鏡難以到達的區域無法準確獲取待測物體信息;無人機能很好地獲取建筑物頂面信息,但對于部分被遮擋的立面就會出現數據空洞現象;而移動背包三維激光掃描不需要接觸被測物體就可以工作,能實現隨走隨測。有效解決一般架站式三維激光掃描儀受限于架設位置、設站數與掃描盲區成反比關系的不足,很好的實現高效數據采集、精細全面的數據采集[6]。
(2)項目前期分別采用全站儀測繪方法及低空無人機測繪方法進行施測。全站儀施測共投入8人,內外業用時3天;低空無人機測繪投入3人,內外業用時1.5天,但掃描盲區較多,加之修補時間,實際用時接近3天;移動背包系統掃描投入2人,內外業用時接近1天。從上述內容可知,移動背包系統進行立面測繪應用不但精度優良,能較好滿足改造工程的需求,作業效率上也明顯優于其他測量手段和方法。眾所周知,人力資源成本和時間成本是測繪項目的生產成本的重要組成部分,使用移動背包系統進行立面測繪能很好地降低人力資源成本和時間成本,從而提高了經濟效益[6]。
6 結 論
項目實踐證明,移動背包三維激光掃描系統高度集成與融合了GNSS、IMU、、INS和SLAM等先進技術,具有作業方式靈活,受場地條件限制小,工作效率高等特點,它改變了城市立面測量的傳統作業方法和作業模式,實現了城市建筑物立面信息的快速獲取和精細化建模,有效降低了測繪項目實施成本,提高了經濟效益。未來,隨著移動背包三維激光掃描技術的研究與發展,其應用領域必將會越來越廣泛,發展潛力巨大。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32