移動(dòng)測(cè)量激光點(diǎn)云數(shù)據(jù)精度評(píng)價(jià)與快速校正方法
2022-05-09 02:08:16黃志
城市勘測(cè) 2022年2期
關(guān)鍵詞:測(cè)量評(píng)價(jià)
黃志
(1.重慶數(shù)字城市科技有限公司,重慶 401121; 2.重慶市移動(dòng)測(cè)量工程技術(shù)研究中心,重慶 401121)
1 引 言
近年來(lái),移動(dòng)測(cè)量技術(shù)受到各行業(yè)的廣泛關(guān)注,隨著傳感器技術(shù)和空間信息技術(shù)的快速發(fā)展,成為工程測(cè)量、城市部件普查、大比例尺地形圖測(cè)繪等領(lǐng)域廣泛應(yīng)用的高科技測(cè)繪技術(shù)[1~4]。車載移動(dòng)測(cè)量系統(tǒng)由激光雷達(dá)、全景相機(jī)、慣性測(cè)量單元(IMU)、全球?qū)Ш叫l(wèi)星系統(tǒng)接收機(jī)、旋轉(zhuǎn)編碼器(DMI)等傳感器組成,具有數(shù)據(jù)豐富、獲取速度快、精度高等特點(diǎn),是目前最先進(jìn)的地面空間信息獲取技術(shù)之一[5,6]。
車載移動(dòng)測(cè)量系統(tǒng)作為一種測(cè)繪技術(shù)裝備,其精度是最主要的評(píng)價(jià)指標(biāo),包括內(nèi)部因素和外部因素兩個(gè)方面[7]。其中內(nèi)部主要影響因素是激光雷達(dá)的錐掃角標(biāo)定、各傳感器相對(duì)位置標(biāo)定和各傳感器之間的時(shí)間同步精度,使用精確的測(cè)量?jī)x器和有效的時(shí)間同步機(jī)制能使內(nèi)因可控;外部因素包括天氣、GNSS基站精度、GNSS接收機(jī)信號(hào)等不可控的因素[8],因此外部因素很難控制。因此,為了提高點(diǎn)云數(shù)據(jù)的精度,對(duì)點(diǎn)云數(shù)據(jù)的精度進(jìn)行評(píng)價(jià)和校正很有必要。
在點(diǎn)云數(shù)據(jù)精度評(píng)價(jià)方面,陳曦等[9]使用南方測(cè)繪和中海達(dá)提供的移動(dòng)測(cè)量系統(tǒng)分別采集黑龍江地理信息產(chǎn)業(yè)園的點(diǎn)云數(shù)據(jù),通過(guò)使用控制點(diǎn)與點(diǎn)云比對(duì),評(píng)價(jià)點(diǎn)云精度;陳洪等[10]選用具有特征的地物的位置信息對(duì)農(nóng)作物點(diǎn)云數(shù)據(jù)精度進(jìn)行評(píng)價(jià),并分析了影響精度的因素;陶鵬杰等[11]使用高精度DLG的高程點(diǎn)和點(diǎn)云墻面點(diǎn)在平面上的投影點(diǎn)到DLG房屋矢量輪廓線的距離來(lái)實(shí)現(xiàn)對(duì)點(diǎn)云高程和平面精度的評(píng)價(jià)。上述方法都是人工采集控制點(diǎn)的思想,針對(duì)大規(guī)模點(diǎn)云數(shù)據(jù)來(lái)說(shuō),實(shí)施工作量較大。在點(diǎn)云數(shù)據(jù)精度校正方面,潘家寶[12]在采集區(qū)域內(nèi)布設(shè)一定密度的靶標(biāo)點(diǎn),通過(guò)測(cè)量靶標(biāo)點(diǎn)的高程來(lái)對(duì)點(diǎn)云高程進(jìn)行校正,可有效提高點(diǎn)云高程精度;陳世榮等[13]在高速路兩側(cè)布設(shè)一定間距的靶標(biāo)點(diǎn),使用靶標(biāo)點(diǎn)校正高速路點(diǎn)云,可在一定范圍內(nèi)提高高速點(diǎn)云精度;孫波中等[14]從控制點(diǎn)布設(shè)網(wǎng)形和布設(shè)密度兩方面設(shè)計(jì)試驗(yàn)來(lái)校正點(diǎn)云,從實(shí)驗(yàn)角度提升了點(diǎn)云精度;郭如寶[15]利用航帶重疊區(qū)域內(nèi)的地面點(diǎn)和建筑點(diǎn)云提取連接線,并進(jìn)行最小二乘匹配,計(jì)算航線的改正值從而實(shí)現(xiàn)點(diǎn)云的校正,可有效提高機(jī)載點(diǎn)云的精度。然而針對(duì)大規(guī)模點(diǎn)云,快速進(jìn)行點(diǎn)云數(shù)據(jù)精度評(píng)價(jià)和校正研究太少。
本文利用RTK多基站、高精度、實(shí)時(shí)差分等特點(diǎn),使用集成在移動(dòng)測(cè)量系統(tǒng)上的RTK設(shè)備,按一秒間隔記錄實(shí)時(shí)差分定位數(shù)據(jù),以時(shí)間為基準(zhǔn)與位置姿態(tài)數(shù)據(jù)進(jìn)行對(duì)齊,實(shí)現(xiàn)點(diǎn)云數(shù)據(jù)的快速評(píng)價(jià)與校正,并通過(guò)實(shí)驗(yàn)對(duì)比分析本方法的有效性。
2 精度評(píng)價(jià)
車載移動(dòng)測(cè)量激光點(diǎn)云數(shù)據(jù)的應(yīng)用中,絕對(duì)精度是非常重要的一個(gè)評(píng)價(jià)指標(biāo),針對(duì)不同的應(yīng)用目的,激光點(diǎn)云的精度要求不同,如大比例地形圖測(cè)繪要求精度比用于建模的點(diǎn)云精度更高。對(duì)大規(guī)模點(diǎn)云精度的評(píng)價(jià),一方面要考慮評(píng)價(jià)的效率,另一方面要保證評(píng)價(jià)的準(zhǔn)確性和全面性。
POS(位置姿態(tài))數(shù)據(jù)是決定點(diǎn)云精度的關(guān)鍵數(shù)據(jù),它是由IMU(慣性測(cè)量單元)數(shù)據(jù)、DMI(旋轉(zhuǎn)編碼器)數(shù)據(jù)、連續(xù)運(yùn)行基準(zhǔn)站數(shù)據(jù)、移動(dòng)站數(shù)據(jù)通過(guò)后處理生成,使用單基站模式,通常位置精度為分米級(jí)。網(wǎng)絡(luò)RTK(實(shí)時(shí)動(dòng)態(tài)差分技術(shù))是實(shí)時(shí)處理多個(gè)測(cè)量站載波相位觀測(cè)量的差分方法,能夠在野外實(shí)時(shí)得到厘米級(jí)定位精度。通過(guò)將網(wǎng)絡(luò)RTK設(shè)備集成到移動(dòng)測(cè)量系統(tǒng)中,在移動(dòng)測(cè)量設(shè)備采集過(guò)程中記錄系統(tǒng)的高精度位置數(shù)據(jù),然后通過(guò)時(shí)間與POS數(shù)據(jù)進(jìn)行配準(zhǔn),計(jì)算匹配點(diǎn)之間的誤差,從而實(shí)現(xiàn)大規(guī)模點(diǎn)云數(shù)據(jù)精度的快速評(píng)價(jià)。具體步驟如圖1所示:
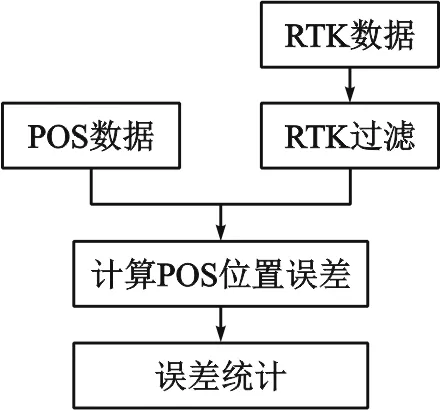
圖1 點(diǎn)云精度評(píng)價(jià)流程
(1)RTK過(guò)濾
RTK設(shè)備的精度會(huì)受到遮擋、高壓線、天氣等因素的影響,為了將RTK位置精度控制在一定范圍內(nèi),需要對(duì)RTK數(shù)據(jù)過(guò)濾。在RTK記錄數(shù)據(jù)中有VDOP、HDOP屬性值,分別用于評(píng)價(jià)RTK數(shù)據(jù)的高程精度和平面精度,通過(guò)設(shè)置高程誤差閾值和平面誤差閾值,將由于外界因素影響而導(dǎo)致誤差過(guò)大的RTK數(shù)據(jù)過(guò)濾,從而將RTK數(shù)據(jù)精度控制在允許的誤差范圍內(nèi)。
(2)計(jì)算POS誤差
在對(duì)誤差進(jìn)行統(tǒng)計(jì)時(shí),將RTK數(shù)據(jù)過(guò)濾閾值設(shè)置為毫米級(jí),可以認(rèn)為RTK數(shù)據(jù)為該位置點(diǎn)的真值。將RTK數(shù)據(jù)的時(shí)間與POS數(shù)據(jù)的時(shí)間配準(zhǔn),計(jì)算時(shí)間匹配點(diǎn)的POS位置誤差。設(shè)M(Xm,Ym,Zm)為POS點(diǎn)位置,與M時(shí)間匹配點(diǎn)N(Xn,Yn,Zn)為RTK位置,則其絕對(duì)精度誤差如式(1)所示:
(1)
(3)誤差統(tǒng)計(jì)
由于POS點(diǎn)誤差具有累積性,同時(shí)可視為真值的RTK位置數(shù)據(jù)具有隨機(jī)性,因此將所有與過(guò)濾后的RTK數(shù)據(jù)時(shí)間匹配的POS點(diǎn)求平面位置中誤差和高程中誤差,即求得POS數(shù)據(jù)的誤差,進(jìn)而評(píng)估了使用POS數(shù)據(jù)解算的點(diǎn)云數(shù)據(jù)的誤差。設(shè)dxi,dyi,dzi分別為第i個(gè)時(shí)間匹配點(diǎn)的X方向上的誤差,Y方向上的誤差,Z方向上的誤差,則平面誤差如式(2)所示:
(2)
高程誤差如式(3)所示:
(3)
其中n為POS與RTK時(shí)間匹配的位置點(diǎn)數(shù),Dh為平面誤差統(tǒng)計(jì)值,Dv為高程誤差統(tǒng)計(jì)值。
3 校正方法
通過(guò)對(duì)點(diǎn)云精度評(píng)估,并結(jié)合點(diǎn)云的用途,分析點(diǎn)云是否滿足精度要求,若滿足精度要求,則可以直接使用原始POS數(shù)據(jù)生產(chǎn)點(diǎn)云數(shù)據(jù),從而省去了原始POS校正的中間環(huán)節(jié)。針對(duì)不滿足精度要求的點(diǎn)云,設(shè)計(jì)了基于RTK的點(diǎn)云校正方法。移動(dòng)測(cè)量數(shù)據(jù)點(diǎn)云數(shù)據(jù)校正流程如圖2所示。通過(guò)RTK數(shù)據(jù)與POS數(shù)據(jù)配準(zhǔn),然后對(duì)POS數(shù)據(jù)進(jìn)行校正獲得高精度POS數(shù)據(jù),最后進(jìn)行點(diǎn)云解算獲得高精度點(diǎn)云數(shù)據(jù)。
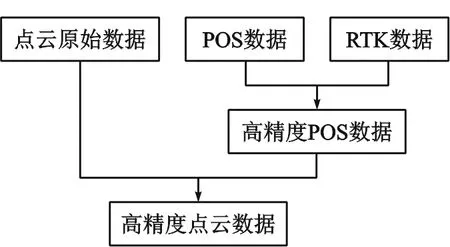
圖2 點(diǎn)云數(shù)據(jù)校正流程
如圖3所示,K1(Xk1,Yk1,Zk1)、K2(Xk2,YK2,Zk2)為RTK點(diǎn),S1(Xs1,YS1,Zs1)、S2(Xs2,YS2,ZS2)分別為RTK對(duì)應(yīng)的POS點(diǎn)。則S1與K1的誤差計(jì)算公式為:
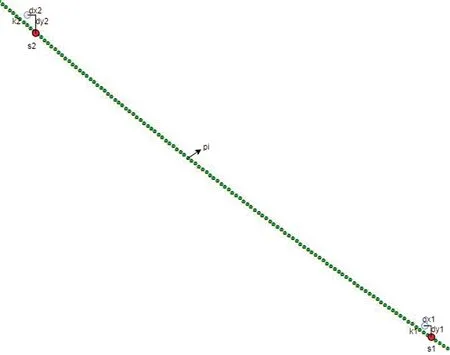
圖3 POS數(shù)據(jù)
(4)
S2與K2的誤差計(jì)算公式為:
(5)
根據(jù)式(4)、式(5),可得S1、S2之間POS點(diǎn)Pi的平差,如下式。
(6)

則校正后的POS點(diǎn)坐標(biāo)為:
(7)
其中(xpi,ypi,zpi)為第i個(gè)POS點(diǎn)原始坐標(biāo)。
4 實(shí)驗(yàn)分析與結(jié)論
實(shí)驗(yàn)使用重慶數(shù)字城市科技有限公司、重慶市勘測(cè)院聯(lián)合研制的車載移動(dòng)測(cè)量系統(tǒng)DCQ-MMS-X3采集點(diǎn)云數(shù)據(jù),控制點(diǎn)數(shù)據(jù)由徠卡全站儀MS60(精度可達(dá)毫米級(jí))采集,如圖4所示,總共采集 10 km的移動(dòng)測(cè)量點(diǎn)云數(shù)據(jù),200個(gè)控制點(diǎn)數(shù)據(jù)。共進(jìn)行了兩個(gè)實(shí)驗(yàn),一是精度評(píng)估實(shí)驗(yàn),比較使用控制點(diǎn)評(píng)估點(diǎn)云精度和使用RTK數(shù)據(jù)評(píng)估點(diǎn)云精度;二是RTK數(shù)據(jù)校正實(shí)驗(yàn),用控制點(diǎn)數(shù)據(jù)驗(yàn)證校正后點(diǎn)云的精度。

圖4 點(diǎn)云及控制點(diǎn)數(shù)據(jù)

使用控制點(diǎn)統(tǒng)計(jì)精度情況表 表1

使用RTK數(shù)據(jù)統(tǒng)計(jì)精度情況表 表2

使用RTK數(shù)據(jù)校正后精度統(tǒng)計(jì)情況表 表3
在使用外業(yè)人工采集的控制點(diǎn)評(píng)價(jià)點(diǎn)云精度實(shí)驗(yàn)中,在測(cè)區(qū)范圍內(nèi)均勻采集了200個(gè)控制點(diǎn),然后在生產(chǎn)的點(diǎn)云數(shù)據(jù)中找到同名點(diǎn),表1顯示了統(tǒng)計(jì)的精度;在使用隨系統(tǒng)的RTK點(diǎn)評(píng)價(jià)點(diǎn)云精度過(guò)程中,將平面誤差過(guò)濾閾值設(shè)置為 0.008 m,高程誤差過(guò)濾閾值設(shè)置為 0.01 m,過(guò)濾后總共443個(gè)點(diǎn),通過(guò)時(shí)間與POS匹配來(lái)統(tǒng)計(jì)誤差,表2顯示誤差統(tǒng)計(jì)結(jié)果;通過(guò)比較,兩種方法的統(tǒng)計(jì)誤差差值在毫米級(jí)。
在使用RTK數(shù)據(jù)校正點(diǎn)云實(shí)驗(yàn)中,將平面誤差過(guò)濾閾值設(shè)置為 0.01 m,高程誤差過(guò)濾閾值設(shè)置為 0.015 m,對(duì)POS數(shù)據(jù)進(jìn)行校正,然后使用校正后的POS生產(chǎn)點(diǎn)云,最后使用外業(yè)采集的控制點(diǎn)統(tǒng)計(jì)點(diǎn)云誤差,表3中顯示了校正后精度大幅提升。將過(guò)濾閾值設(shè)置為不同的值,閾值在一定的區(qū)間內(nèi),點(diǎn)云誤差相差不大;閾值過(guò)大,達(dá)不到校正目的,閾值過(guò)小,會(huì)使過(guò)濾后的RTK數(shù)據(jù)變少,產(chǎn)生點(diǎn)云局部誤差過(guò)大情況。
實(shí)驗(yàn)結(jié)果表明,車載移動(dòng)測(cè)量系統(tǒng)點(diǎn)云數(shù)據(jù)精度可以使用RTK數(shù)據(jù)來(lái)進(jìn)行精度評(píng)價(jià),選擇合適的RTK過(guò)濾閾值,對(duì)POS數(shù)據(jù)進(jìn)行校正,然后使用校正后的POS生產(chǎn)點(diǎn)云,能夠提升點(diǎn)云的精度。
5 結(jié) 語(yǔ)
本文設(shè)計(jì)了一種車載移動(dòng)測(cè)量系統(tǒng)點(diǎn)云數(shù)據(jù)精度評(píng)價(jià)與校正方法,將RTK設(shè)備隨移動(dòng)測(cè)量系統(tǒng)架設(shè),連續(xù)記錄RTK數(shù)據(jù);通過(guò)時(shí)間與POS數(shù)據(jù)進(jìn)行配準(zhǔn),然后進(jìn)行點(diǎn)云精度評(píng)價(jià)和校正,并通過(guò)實(shí)驗(yàn)驗(yàn)證了該方法的有效性。借助該方法,省去了外業(yè)采集控制點(diǎn)的工作,提升了工作效率和點(diǎn)云精度,為高精度激光點(diǎn)云數(shù)據(jù)的應(yīng)用提供支撐。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國(guó)工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問(wèn)題研究(2012年1期)2012-03-25 09:54:51
- 城市勘測(cè)的其它文章
- 強(qiáng)化規(guī)劃引領(lǐng),規(guī)范地下管線規(guī)劃建設(shè)
- 共抗疫情 南京市測(cè)繪勘察研究院股份有限公司奮戰(zhàn)在一線
- 實(shí)景三維青島建設(shè)項(xiàng)目順利通過(guò)院士專家驗(yàn)收
- 天津市測(cè)繪院有限公司迎戰(zhàn)“奧密克戎”廣獲贊譽(yù)
- 自然資源武漢市衛(wèi)星應(yīng)用技術(shù)中心掛牌成立
- 北京市測(cè)繪設(shè)計(jì)研究院和自然資源部時(shí)空信息與智能服務(wù)重點(diǎn)實(shí)驗(yàn)室簽訂戰(zhàn)略合作協(xié)議