機載激光雷達在河流調查中的應用研究
2022-05-05 05:42:20李紅林
經緯天地 2022年1期
李紅林
(山西省測繪地理信息院,山西 太原 030001)
0.引言
近些年,測繪遙感技術軟硬件發展迅速,新技術的出現提升了測繪遙感的生產力。機載激光雷達(LiDAR)技術的出現,為新型基礎測繪的數據采集帶來了新的方向。LiDAR技術是集激光掃描儀(1aser scanning)、全球定位系統(Global Position System,GPS)、慣性導航系統(Inertial MeasurementUnit,IMU)于一體的主動式航空遙感技術,通過對地面進行三維掃描獲得空間信息點云數據[1]。激光雷達(LiDAR)已成為一種新型空間數據獲取手段,利用激光測距技術、高精度動態載體姿態測量技術和高精度動態GPS差分定位技術獲取各激光腳點的空間三維坐標及反射強度等信息。其數據采集對天氣、季節以及時段要求較低,可快速獲取地表空間信息。數字高程模型作為基礎測繪數據,在地學分析等方面扮演著重要的角色,機載LiDAR已成為快速獲得大范圍高精度DEM的重要手段[2]。
LiDAR技術在各個方面迅速發展,相對于其他遙感技術,它是遙感技術領域的一場革命。目前激光雷達數據主要應用于基礎測繪、城市三維建模等方面。其具有數據處理智能化程度高,數據生產周期短、不接觸性、高密度、高精度(尤其是高程精度)、作業成本低等優勢[3]。它采用主動性工作方式,通過自身發射的激光脈沖反射來獲取目標信息,不受天氣條件限制,能全天候實施對地觀測。機載激光雷達傳感器發射的激光脈沖對植被也具有一定的穿透能力,這是傳統航空攝影測量技術所無法比擬的[4]。
本文主要是在山西省主要河流土地資源調查項目建設中,利用機載激光雷達技術在某市域河流調查中獲取數據,對獲取的LiDAR數據進行解算,解算完成后對點云數據進行分類濾波、坐標轉換、點云分塊等處理,最終生成DEM、DSM成果。
1.河流調查技術流程
山西省某市域河流土地資源調查的激光雷達數據處理任務的主要技術路線為:
根據獲取的河流治導線外擴500米范圍激光雷達原始數據,首先進行數據預處理,包括軌跡文件的解算、原始激光掃描數據的釋放等;其次對激光雷達點云數據進行去噪分類處理、坐標轉換、高程精化;最后將點云按照標準分幅進行分塊處理,進行數字地表模型和數字高程模型的生產。經質檢合格后,制作數字地表模型和數字高程模型的元數據,最后提交所有成果數據。生產流程(如圖1所示):
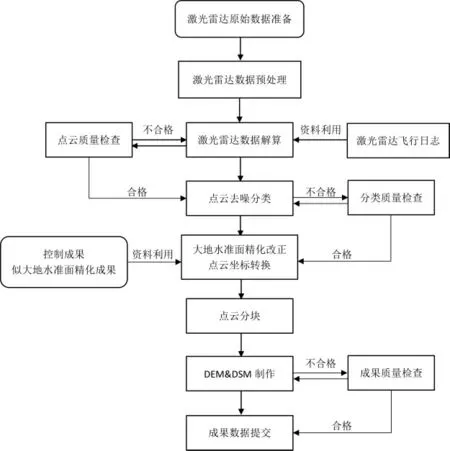
圖1 生產總流程
2.激光雷達數據處理
2.1 激光雷達數據獲取
激光雷達掃描數據獲取采用AEROS-912動力三角翼飛行器,RIEGL VQ580i機載激光雷達系統集成Trimble AP60慣導系統。
Riegl-VQ580i機載激光雷達掃描系統初始采集到的原始數據包括:原始激光點云數據(由激光雷達掃描儀采集得到)、機載INS-GPS導航數據(由慣導系統采集得到)。
2.2 激光雷達數據預處理
本次使用POSPac軟件對集成全球衛星系統(GNSS)與慣性導航技術的定位定姿系統所采集的數據進行處理,通過計算獲取高精度的定位定姿數據。
軌跡解算完成后,使用RIEGL的系列軟件釋放點云數據。
2.3 點云解算
因本次生產項目使用的是RIEGL激光雷達儀器產品進行數據獲取,已有的激光雷達原始數據包含了INS-GPS高精度軌跡文件,故數據預處理僅需將原始的激光數據進行解析,獲得通用格式(*.las)的點云數據。項目原始數據以RiProcess工程進行組織(*.rpp),需使用RiProcess軟件解算點云。
點云解算涉及工程配置、軌跡截取、點云數據釋放、點云數據航帶調整、重新解算、點云導出等流程,詳細解算流程如下:
2.3.1 配置工程
在RiProcess軟件中打開*.rpp格式的工程文件,設置工程坐標系為WGS84/UTM_North zone 43。將sbet_Mission.out軌跡文件導入軟件中,并轉換格式為*.pof,轉換時需選擇軌跡數據對應的日期和時區。然后在軟件中根據軌跡的最大、最小經緯度計算感興趣的區域范圍。
2.3.2 軌跡截取
處理機載數據時,一般會選擇測量范圍內的長直航線進行解算。在RiProcess軟件中選擇軌跡后,會按照原始的RXP根據選擇的軌跡進行截取,去除冗余數據,保留有效數據區。每一條軌跡均會生成一個RXP文件,后續將使用這些文件進行解算和航帶平差。如不進行軌跡截取操作,將無法進行激光數據調整。
2.3.3 點云數據釋放
在數據解算前,需先設置點云的提取參數,包括濾波設置和MTA方法設置等。其中,MTA方法選擇Auto可有效減少因MTA效應造成的噪點。針對本次項目數據出現的航高超過設備建議的最大值導致地面點云缺失、空中噪點嚴重的情況,可嘗試使用Fixed in zone方法,并選擇對應的Zone(通過計算得到)。然而,該方法僅能解算出某個固定的Zone內的數據,對于跨區間的數據不能用該方法解算出全部的數據,但可作為補充。
點云解算需給定設備的初始解算參數及激光相對于慣導數據的偏移量和旋轉角。通過激光數據解析、激光和軌跡的融合處理,最后生成可視化的點云數據。
2.3.4 點云數據航帶調整
點云解算完成后,航帶與航帶的重復掃描數據之間存在分層,從幾厘米到幾十厘米不等,需通過創建航帶間的公共平面、調整每條航帶的姿態角和調整偏移量來實現對激光數據的調整。
2.3.5 點云重新解算和輸出
激光數據調整后,需重新和軌跡數據進行融合,解算點云。解算完成后將成果導出為LAS(V1.2)格式。
2.4 點云去噪分類
因項目點云數據存在大量的空中或低于地面的噪點,且無法通過軟件算法一鍵過濾,所以點云后處理的第一步是將噪點手動濾除。點云存在的噪點(如圖2所示):

圖2 點云噪點
點云分類主要目的是將點云中的構筑物、植被等地物濾除,僅保留地面位置的點云,反映實際地形的起伏情況,以供生成數字高程模型(DEM)。分類使用已有的Macro宏命令在Terrasolid中運行,軟件自動進行去噪、地面點分類等步驟。點云宏命令運行(如圖3所示):

圖3 點云分類宏命令
自動分類完成后,需檢查地面點的情況。此時需要根據地面點類別生成可編輯的模型,查看模型中不合理的凹凸,并通過截取剖面查看點云是否存在地面以下的低點或者空中的噪點,若有,通過手動分類的方式將其分類到其他類別。另外,查看模型中是否有未過濾的建筑、植被、架空橋梁等,若有,也需通過手動分類的方式將其分類到其他類別。檢查無問題后,保存當前點云,并將地面點類別單獨導出保存。模型檢查分類結果(如圖4所示):

圖4 通過可編輯TIN模型檢查分類結果
2.5 點云坐標轉換
根據項目成果坐標系要求,點云的數學基礎應為:平面坐標系統采用國家大地坐標系CGCS2000;高程系統采用1985國家高程基準;成圖比例尺為1∶2000。
故需將WGS84/UTM_North zone 43坐標系下的點云重新投影,采用高斯-克呂格投影,3°分帶,中央經線為114°。并通過七參數進行點云平面坐標轉換,把點云數據轉換到項目要求的CGCS2000國家大地坐標系。高程轉換利用山西省大地水準面精化模型,將點云數據的大地高轉換到1985國家高程基準。
2.6 點云分塊
在CoProcess軟件中,采用1∶2000比例尺的標準分幅(50cm×50cm)對點云進行分塊處理。點云分塊后再進行DEM或者DSM的生產,將大大減少軟件同時處理的數據量,在海量點云數據的處理中是必不可少的。點云分塊轉換(如圖5所示):

圖5 CoProcess分塊轉換
2.7 成果輸出
點云分塊后,使用分塊點云數據生產數字高程模型DEM和數字表面模型DSM。根據項目成果要求,設置格網間距為0.5米,邊界外擴50米。為達到外擴50米要求,軟件會自動調用相鄰點云數據參與模型生成。模型生成后,檢查模型是否存在空洞和因噪點導致的不合理凹凸、DEM是否存在未濾除的建筑等,若存在此類問題應使用CoProcess軟件進行高程修補、刪除、平滑、置平等編輯處理。DEM生成(如圖6所示):

圖6 生成DEM
3.質量控制
3.1 總體要求
首先,加強數據生產過程中的質量監督和控制,實行生產人員自查、質檢人員抽查的總體原則,技術管理人員加強數據生產過程中的技術指導和疑難解答,使生產人員對有關技術標準的認知清晰準確,提高效率,確保質量。
其次,加強成果質量控制,在生產人員自查的基礎上,質檢人員進行二次檢查,對于檢查不合格的成果退回生產環節重新處理,直至所有成果檢查合格,保證提交的成果無質量問題。
3.2 檢查內容
3.2.1 點云質量及覆蓋度檢查
結合本次河流治導線及外擴范圍,檢查解算后點云的覆蓋情況,如,是否存在局部漏洞、是否未涉及外擴范圍邊界等,確保點云的完整性。初步查看點云的密度、坐標基準和噪點情況,對于點云中出現的大量噪點情況,嘗試修改RiProcess中解算的相關參數來對點云進行改進。
3.2.2 點云分類成果檢查
通過目視檢查的方式,將點云數據通過類別或者高程渲染查看;重點檢查地面點類別分類是否正確,最有效的方法是將地面點類別生成可編輯模型,查看模型高程不連續處、凹凸不平處,借助繪制剖面圖進行分析判斷。當檢查出分類錯誤的點時,使用手動分類的工具改變錯誤點的類別。
3.2.3 DEM、DSM模型檢查
查看DEM、DSM模型的空間參考信息、格網大小、分幅和模型外擴等是否符合項目要求;查看DEM、DSM模型是否存在不合理空洞和凹凸;查看DEM、DSM模型不同圖幅接邊處數據是否連續。
檢查DEM、DSM模型的高程精度,需在軟件中同時導入河流實測的高程檢查點坐標和DEM、DSM模型做對比,軟件自動提取同名點高程信息,并輸出對比報告,可精確反映DEM、DSM模型的高程精度。
4.結束語
機載激光雷達新技術在本次生產中的應用具有一定的優勢與發展前景,驗證了機載激光雷達新技術在實際生產中的應用優勢,對今后的日常生產工作起到指導作用。其優勢表現為:(1)獲取空間信息的速度快、效率高,作業安全;(2)獲取的數據精度較高;(3)機載激光雷達技術提供的信息較為豐富。
新技術的使用,讓我們感受到了作業的高效便捷,但是機載激光雷達技術也表現出一些不足的地方:機載激光雷達技術采集的部分數據真實性存疑,需要人工辨別;機載激光雷達技術比較復雜,專業性強,數據處理需要系統化的提高;機載激光雷達數據解算有限制,硬件產品依賴國外進口。
即使這樣,機載激光雷達新技術應用前景在各行各業依然看好。特別是在測繪行業,機載激光雷達與其他設備的配合采集,大大提高了一次性獲取多源數據的能力,省時省力,數據精度符合生產需要,能滿足大比例尺地圖測繪、工程測量、變形監測等不同測繪行業的各種需求。隨著智能化的發展,機載激光雷達新技術在國民生產中一定會發揮更大的作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
