基于目標檢測的機械臂分揀研究
2022-05-05 14:15:53王臘苗
粘接
2022年4期
關鍵詞:深度學習
王臘苗






摘 要:機械臂分揀作業,是當前制造、物流、環保等領域最常見的工作場景之一。以基于目標檢測的機械臂分揀作業系統為主要研究對象,利用深度學習對機械臂分揀抓取工作中的目標檢測算法進行優化并進行實驗分析,結果表明:優化以后的算法能夠有效提升機械臂分揀、抓取成功率。該系統可移植性強,可廣泛應用于不同類型機械臂分揀作業流程。
關鍵詞:深度學習;目標檢測;機械臂抓取;機械臂分揀
中圖分類號:TP241 文獻標識碼:A 文章編號:1001-5922(2022)04-0166-04
Abstract: The sorting operation of robot arm is one of the most common working scenes in manufacturing, logistics, environmental protection and other fields. Taking the sorting operation system of the robot arm based on target detection as the main research object, this paper uses deep learning to optimize the target detection algorithm in the sorting and grasping work of the robot arm and carries out experimental analysis. The results show that the optimized algorithm can effectively improve the sorting and grasping success rate of the robot arm. The system has strong portability and can be widely used in the sorting operation of different types of robot arm.
Key words: deep learning; target detection; grasping of robot arm; sorting of robot arm
分揀工作已逐漸發展為工業生產、物流運輸、航空航天、教育醫療等領域不可或缺的重要環節[1]。在傳統的分揀作業工作中,多利用純人工方式進行工件抓取、分揀等存在分揀效率低、分揀錯誤率高等弊端。為此,有研究機構開始嘗試利用圖像識別技術結合PLC等開發出一種能夠自動完成工件分揀工作的機械臂系統,大大降低了工件分揀工作中的人力成本,縮短了分揀工作所耗時間。然而,隨著現代工業等領域對重復性強、場景單一地分揀作業系統分揀智能化要求的不斷提升,利用傳統圖像方法完成機械臂分揀作業逐漸暴露出準確率低、魯棒性差以及可移植性不足等問題,需要一種更加智能化的方法進行機械臂分揀系統工作優化。本文所開發系統,具備一定的目標檢測模型配置選擇優越性,能夠一定程度提升機械臂分揀系統工作成功率和穩定性。
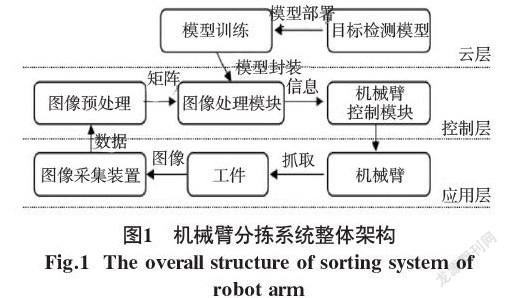
1 機械臂分揀系統整體……
登錄APP查看全文
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49