管帶機智能巡檢機器人的總體設計
2022-05-01 13:41:26廖輝
甘肅科技縱橫 2022年1期
廖輝

關鍵詞:管帶輸送機;機器人;智能巡檢;STM32
中圖分類號:TP242.6 文獻標志碼:A
0引言
隨著供給側改革成效逐步顯現,優質產能得到了有序釋放,我國經濟持續平穩發展。工業增長對帶式輸送產品的需求量產生了積極的促進作用。十九大提出“既要金山銀山,又要綠水青山”的號召。2018年,交通運輸部、發改委提出“公路轉鐵路”的交通運輸結構優化,減少公路運輸帶來的尾氣排放、揚塵污染問題,2019年生態環保部、發改委等11部門聯合印發《柴油貨車污染治理攻堅戰行動計劃》。綜合發布的各種政策來看,以管帶輸送為代表的經濟環保的短途散料運輸方式將迎來新的發展機遇。
政府部門連續下發了《中國制造2025》《關于加快煤礦智能化發展的指導意見》《關于促進智能電網發展的指導意見》等文件,確定了全面開展智能制造技術研究將是發展高端裝備制造業的核心內容,傳統的散料輸送機械必須借助智能化升級改造的熱潮以提高自身效能。
巡檢機器人可以替代人工進行巡檢作業,已經在一些工業場景中得到應用,例如電力行業、化工行業、地下廊道等相對靜態的情景下,開展視頻拍攝,設備的抄表、氣體泄漏等邏輯相對簡單的巡檢。也有針對槽型帶式輸送機(以下簡稱皮帶機)進行機器人智能巡檢的運用案例,但是一方面現有機器人智能化水平較低,停留在視頻拍攝的水平。另一方面管帶機結構復雜程度遠超皮帶機,現有的皮帶機巡檢機器人的很多功能無法直接運用到管帶機上[1-2]。
1巡檢機器人功能需求
管帶機智能巡檢機器人基礎功能有[3]:
(1)多物理量感知:配備高清視頻拍攝,熱成像拍攝,噪音檢測和溫濕度測量等功能,多種傳感器用于提取管帶機各種運行特征。
(2)自主避障:機器人能感知障礙物,實現智能防撞和避障功能,遇到障礙自動停止并報警。
(3)巡檢任務自主規劃:根據管帶機的運行情況,自主規劃巡檢任務、充電策略。
(4)定位功能:當出現異常情況時,可以快速準確地確定位置,指導人工迅速到達現場。
(5)后臺終端監控:在電腦、手機、平板等不同終端上均能登陸后臺,對巡檢機器人進行控制和對采集信息進行處理。
在以上基礎功能基礎上,針對管帶機結構特點和故障嚴重性,要求智能巡檢機器人必須具備的檢測功能有:
(1)運行狀態檢測:輸送帶跑偏在管帶機上表現為扭轉,扭轉后會造成撒料等故障。由于管帶機的輸送帶卷成管狀運行,故其邊緣檢測更為復雜。機器人采用基于AI視覺系統的圖像自動識別裝置,由視覺識別系統檢測輸送帶搭接邊緣,根據搭接情況進行扭轉、反搭等判斷并報警。
(2)托輥損壞檢測:管帶機的托輥數量數倍于皮帶機,運行過程中托輥的檢測工作量更大。機器人配備紅外線熱成像儀和音頻采集器,通過收集運行狀態下托輥的溫度和噪音數據進行分析,結合視覺識別標定托輥,實現對托輥損壞情況進行檢測及壽命智能診斷。
(3)輸送帶損傷檢測:脹管是管帶機特有的一種故障,表現為承載段管狀帶內物料填充率過高,可能導致桁架擠壓變形,如圖1所示。脹管、輸送帶撕裂等問題如果沒有被及時發現,將導致重大經濟損失。機器人采用可見光視覺識別、紅外線、激光+CCD掃描等手段,對輸送帶形狀進行對比分析,針對脹管、撕裂等問題實現實時報警。
2主要設計方案選型
2.1設計原則
(1)結構重量輕。減少機器人及其軌道對管帶機鋼桁架的附加載荷,提高整體經濟性。
(2)續航時間長。由于管帶機線路普遍較長(普遍有數公里),需要機器人具備較長的續航能力。
(3)可靠性高。機器人長期在戶外各種環境中連續作業,通常全年無休,必須具備較高可靠性。
(4)機動性能好。管帶機具有連續轉彎和大角度爬坡能力,且桁架的截面多變,所以機器人必須相應具備動性能。
(5)環境適應強。機器人可能經歷高低溫、雨雪、風霜、大風、沙塵等,適用溫度范圍為-10℃~50℃,滿足戶外使用要求。
2.2行走方式
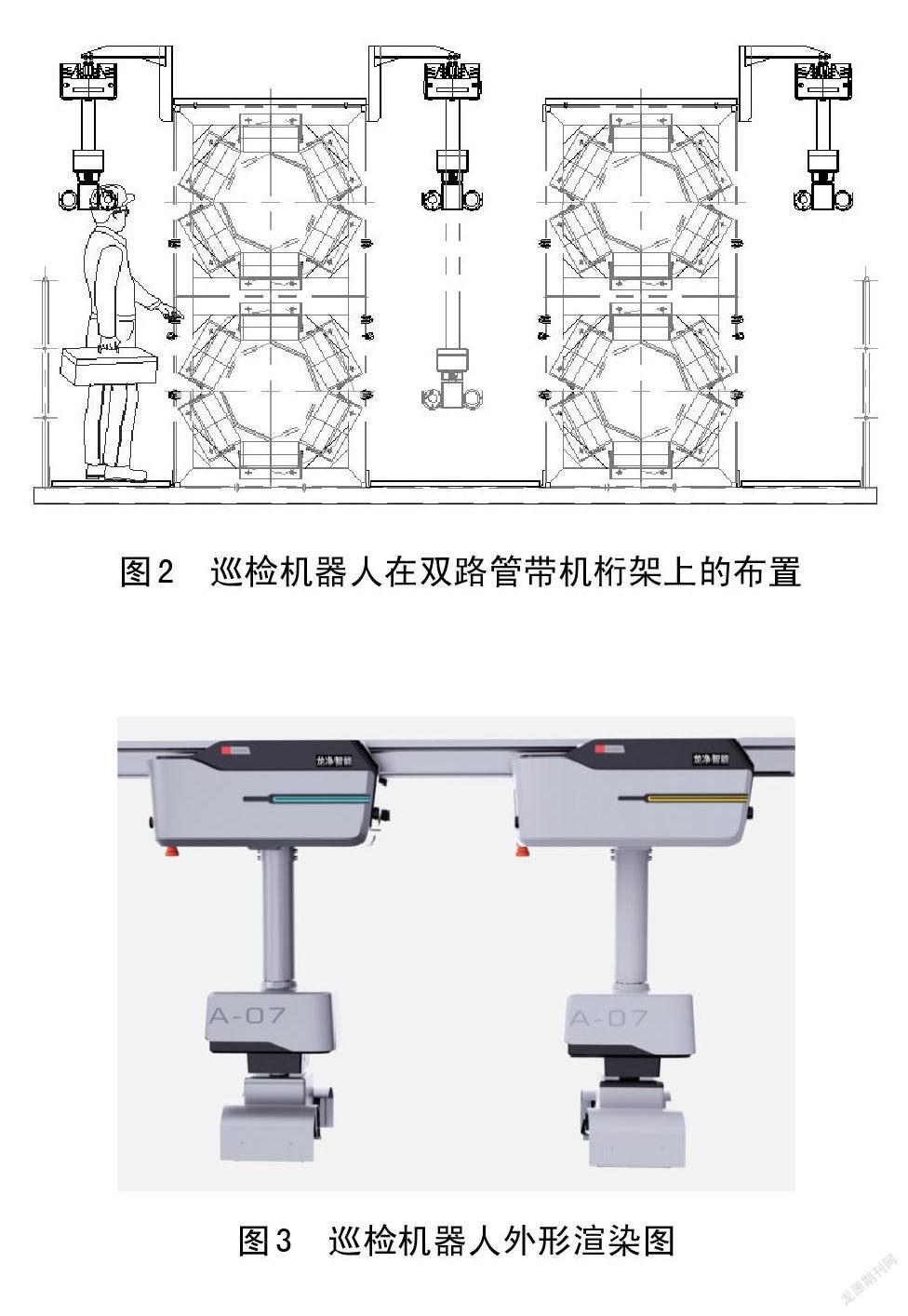
對比不同行走方式后,最終確定管帶機巡檢機器人的為桁架兩側懸掛軌道,機器人倒掛于軌道上行走。單路管帶機布置兩條軌道,雙路管帶機布置3條軌道,機器人其采用集轉向、導向、預張緊及驅動為一體的雙驅機構結構設計,滿足管帶機上桁架的線路變化,如圖2所示。
由于管帶機的桁架截面較高,因此配備伸縮范圍為1.5m的竹節結構,方便機器人的攝像頭觀察回程段和承載段的所有托輥狀態。機器人下端距離桁架走道的最大距離為1680mm,當機器人與走道行人相遇時,行人采取低頭姿勢后可以從機器人下方穿過。
機器人從上往下依次為行走部分、控制部分、升降節、攝像頭云臺。采用工程塑料外殼,銀黑配色,搭配LED發光帶用于顯示機器人工作狀態,如圖3所示。
2.3控制組成
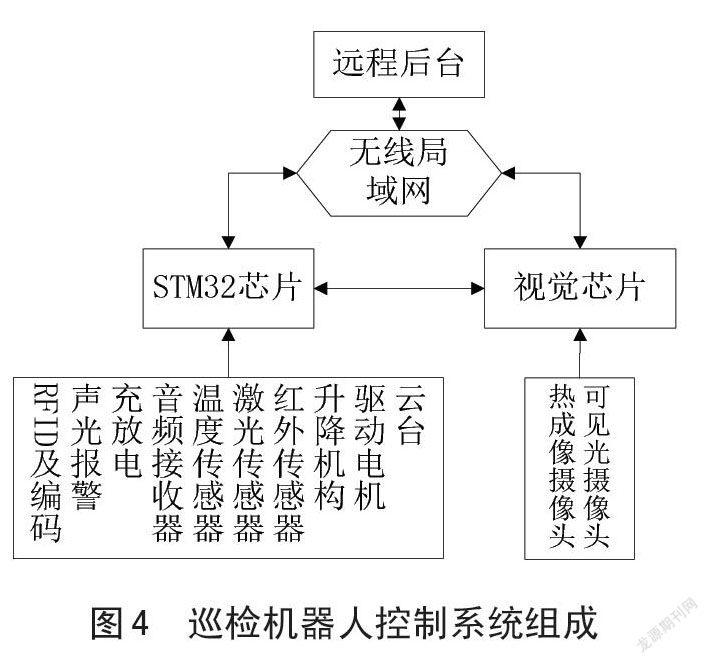
管帶機智能巡檢機器人系統組成如圖4所示,由STM32芯片作為機器人的主控芯片,控制機器人各部件按照流程執行基本巡檢操作。視覺芯片負責執行人工智能算法,處理雙光譜攝像頭拍攝的畫面,并向遠程后臺傳遞處理后的數據。遠程后臺通過無線網絡實現對機器人的管理,報警預警,數據處理等功能[4]。
由于主控芯片需要控制整臺機器人,且需要配備較多的傳感器,因此選擇型號為STM32F103RET6,時鐘頻率為72MHz,閃存容量512KB,RAM為64KB,具有64個引腳可供使用。無線wifi通信采用串口轉wifi芯片為ESP32,工作模式為AP,配置外置天線以提高信號強度。
視覺處理芯片采用NVDIAJetsonTX2,其AI算力達到1.33TFLOPs。使用開源的視覺庫OpenCV結合C++進行算法編程,充分利用其自帶的圖像處理函數,大幅度提高項目開發進度[5]。
2.4驅動設計
運行速度v=0.1~0.3m/s,機器人重量m=30kg,爬坡角度α=15°,續航時間t=8h,驅動車輪直徑D=0.05m,摩擦系數μ=0.2,傳動系數η=0.9。
機器人擬采用減速電機直驅,在爬坡軌道上行走的功率和電機扭矩為:
根據平均驅動功率,可以計算出可達到額定續航時間所搭配的電池容量。鑒于鋰電池具有長壽命、無記憶效應等優點,選擇電池為兩塊12V20Ah的鋰電池,布置在機器人兩側作為整套系統的電源。
根據功率和扭矩選擇減速電機型號,通過單片機輸出PWM控制電機的轉速。電機最終選型為12V電壓,電機額定功率為20W,輸出轉速110r/min,帶霍爾編碼器,可以通過單片機讀取電機旋轉角度信息。減速電機數量為2[6],如圖5所示。
機器人運行定位方式為:首先以GPS模塊獲取機器人的大概經緯度,從而得到機器人在數公里長度的巡檢線路上的大概位置,誤差為10m。并在輸送線路的關鍵位置,例如管帶機過渡段、空間弧桁架段、充電塢站等安裝電子標簽進行定位,通過RFID實現機器人到達管帶機不同區段后執行不同的巡檢任務規劃。最后根據減速電機內的霍爾編碼器反饋電機旋轉角度,換算出機器人行走距離,和GPS定位、RFID定位相結合,從而得到較為精確的定位結果。
3人機交互控制界面
采用HTML+JavaScript+CSS的方式編寫巡檢機器人控制Web界面,提供了監控總覽、報警管理、錄像管理、查詢與統計、機器人管理、巡檢管理、系統管理等功能。能夠對整個項目下所有機器人進行統一調度,所有機器人的報警信息均可在此呈現,并保存報警視頻和圖片,如圖6所示。具備連續錄像功能,最長保存視頻時間1個月,方便回溯故障發生時的狀況。
4機器人安裝
主要涉及機器人本體、軌道、塢站、無線系統設備、機器人管理后臺、光纖等安裝施工,具體如下:
(1)軌道:沿桁架生根軌道支撐,布置機器人行走軌道,機器人沿軌道自由行走;
(2)塢站:頭尾設置塢站,實現機器人自主充電和本體清洗;
(3)無線系統:沿線布置無線AP和配套通信箱,構建無線局域網,實現機器人與后臺通訊;
(4)機器人管理后臺布置在集控室,用于機器人的遠程管理和監控;
(5)塢站、無線通信箱所需電源取自沿線照明配電柜;
(6)機器人清洗所需氣源引自管帶機頭尾除塵器清灰系統。
5結束語
智能巡檢機器人為長距離管帶機巡檢工作提供了一種新的解決方案。系統利用巡檢機器人實時采集管帶式輸送機運行中的各種數據信息,并利用視覺識別技術進行前瞻性故障診斷,實現預防性運行維護,減少設備突發性故障,延長設備壽命,降低運營成本,進行全周期設備管理,消除事故隱患。
利用智能巡檢機器人實現管帶機巡檢任務靈活性、智能化、自動化的管理需求,提高場內智能化管理水平。采用智能巡檢替代人工巡檢,可杜絕人生安全事故和提高巡檢效率,實現安全高效生產運營。
