帶稱重功能監護病床自動去皮系統研制
2022-04-25 05:53:38葉建平翟潛林鵬翔黃曉霞王志康褚永華梁家理陳長俊
中國醫療設備 2022年4期
葉建平,翟潛,林鵬翔,黃曉霞,王志康,褚永華,梁家理,陳長俊
1. 浙江大學醫學院附屬第二醫院 a. 臨床醫學工程部;b. 急診監護室,浙江 杭州 310009;2. 浙江大學 流體動力與機電系統國家重點實驗室,浙江 杭州 310027
引言
醫護人員有兩種無創方法來評估重癥監護室患者出、入量平衡狀態[1-2]:一種是護士定性加定量,通過電子病歷系統繪制每日出、入量平衡圖;另一種是測量患者體重變化。但通過繪制出、入量平衡圖的方法,還需進一步提高準確性[3]。相較于前種方法,國外同行相對認同第二種評估方法,因為體重被認為是估計流體平衡的更準確方法,故而得到推薦。體重亦是重癥燒傷患者補液和營養支持的重要依據之一,研究表明每小時記錄一次重癥燒傷患者的體重極為重要[4]。
醫療儀器的設計要符合人體工程學,全面考慮醫護人員的使用情況,提升體驗感、便捷性[5]。本文提出一種新方法解決醫護人員易忽略校零而導致稱重精度不高的問題。系統采用毫米波傳感器,基于77 GHz毫米波射頻互補金屬氧化物半導體技術,通過循環掃描選定區域獲取患者是否在床信號。患者進出重癥病房都有固定通道門,在不增加醫護人員工作量的條件下,采用Wi-Fi無線傳輸信號,觸發稱重系統自動校零。
1 材料與方法
1.1 系統設計
系統包含過門檢測模塊和患者不在床檢測模塊(圖1)。其中,過門檢測模塊包含毫米波雷達檢測模塊、多點控制單元(Multi Control Unit,MCU)模塊、Wi-Fi模塊、云端平臺。患者不在床檢測模塊包含毫米波雷達檢測模塊、患者呼吸胸廓特征提取、患者不在床識別、MCU模塊、Wi-Fi模塊、云端平臺、稱重系統。基本運行流程為轉運床通過監護室門時,毫米波雷達探測到患者,通過Wi-Fi發送0/1信號至云端平臺,所有重癥監護床接收過門信號。重癥監護病床在接收到過門信號時,通過毫米波雷達檢測有無患者在床。當無患者在重癥監護床時,稱重系統校零;有患者在重癥監護床時,稱重系統維持原狀態。
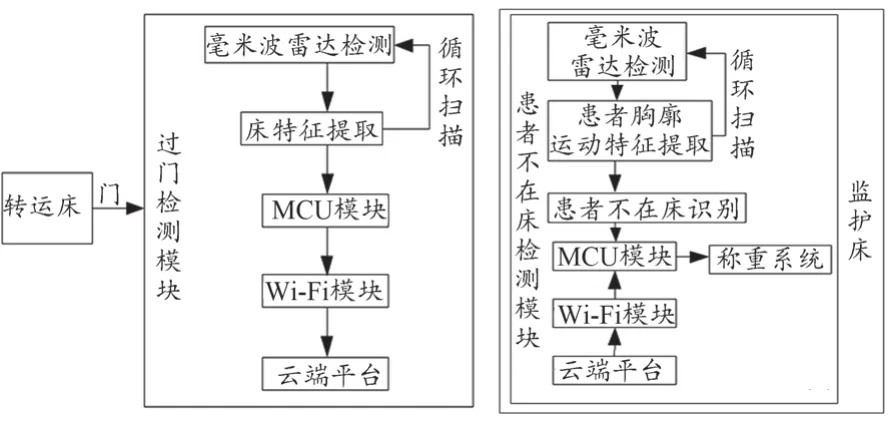
圖1 帶稱重功能監護病床自動校零系統框圖
1.2 具體實現方法
1.2.1 過門檢測模塊
在打開監護室前,毫米波雷達通過掃描轉運床可檢測轉運床上是否有患者,進而確定是否觸發監護床稱重系統校零。如圖2所示,本研究使用的毫米波雷達實物模塊采用德州儀器的T1模塊,其毫米波發射和接收集成在同一電路板,檢測范圍為0.04~100+m。該模塊還安裝在監護室患者通道門框上,見圖3。
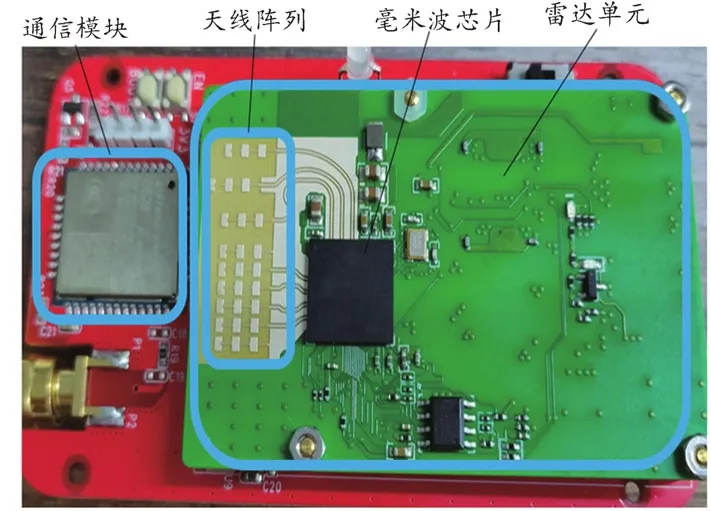
圖2 毫米波雷達實物圖
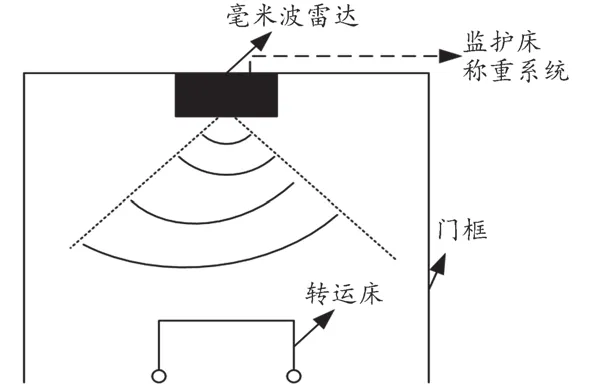
圖3 轉運床過門雷達檢測點
1.2.2 患者不在床檢測模塊
如圖4所示,患者不在床檢測模塊亦采用T1模塊,一般固定在床頭,毫米波雷達以±60°角度和25 s間隔循環掃描。

圖4 患者不在床檢測示意圖
1.3 患者不在床狀態檢測算法
定義NZ是毫米波掃描的區域數,S[t]是雷達第t幀的Nr×Naz距離方位角復數頻譜矩陣,其第(n,m)個元素表示為Sn,m[t]。Zi是第i個區域內的所有距離方位角柵格的集合。算法流程框圖如圖5所示。

圖5 患者不在床狀態檢測算法流程圖
1.3.1 感興趣區選取
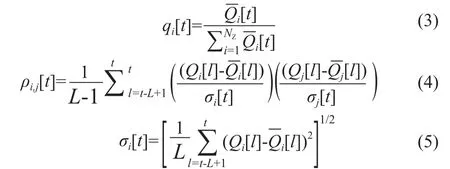
對每個區域,提取用于確定占用狀態的特征。功能可由每個區域的平均功率得出(稱為“區域功率”)。對于雷達上t幀i區,平均區域功率計算如式(1)所示。

對第t幀的區域i,進一步定義移動平均區域功率,見式(2)。

其中,L是移動平均的窗口長度。
對區域的移動平均功率進行峰值檢測,篩選出峰值感興 趣 區(Region of Interest,ROI),{Zk1,Zk2, …,Z(kNROI)},NROI為檢測出的ROI數。
此外,區域特征定義包括:① 對于第t幀i處的區域,定義移動平均功率如公式(3)所示;② 在區域i和區域j之間,區域功率的相關系數如公式(4)所示;③σi[t]是區域i的Qi[t]的標準偏差,計算方法見公式(5)。
1.3.2 胸廓運動特征提取
對其中任意一個ROI區域Zk,計算復數信號Sn,m[t],(n,m)=Zk的相位,并進行相位展開得到φn,m[t];然后使IIR帶通濾波器對進行濾波得到提取的特征包括:① 移動平均窗口峰值定義為公式(6);② 移動平均窗口極差定義為公式(7);③ 移動平均窗口功率譜定義為公式(8);④ 移動平均窗口自相關函數生成的序列定義為公式(9);⑤ 對時間序列進行空間重構,可得到重構矩陣,移動平均窗口排列熵序列定義為公式(10)。
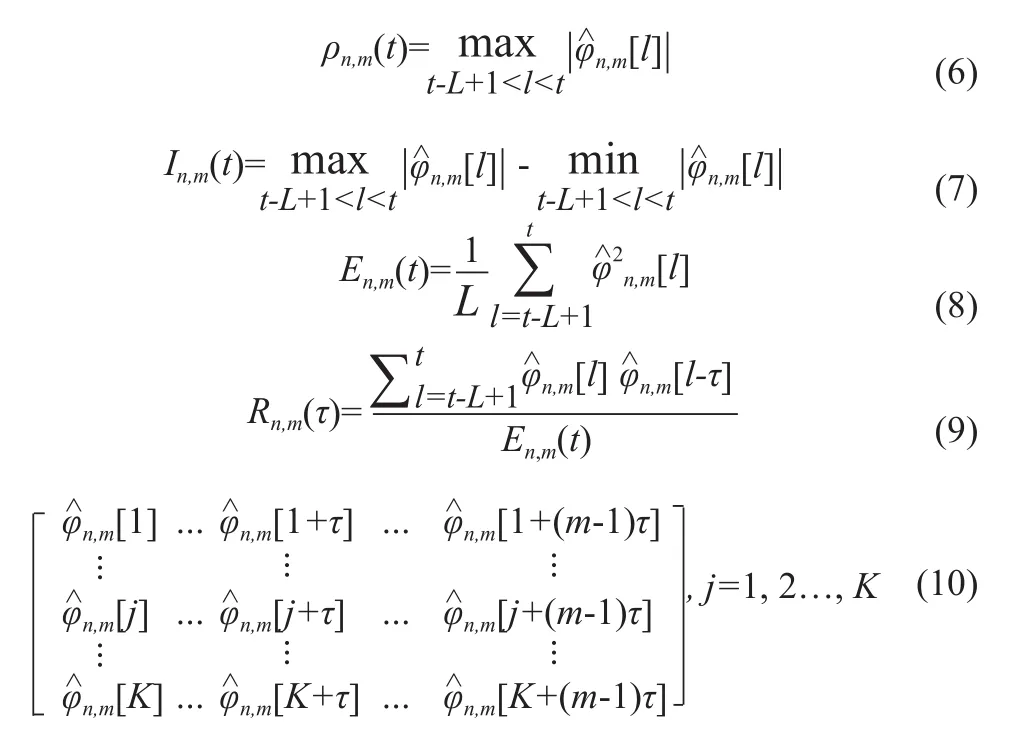
其中,m為嵌入維數,τ為延時時間,K為重構分量,K=n-(m-1)×τ。
重構矩陣中每一行為一個重構向量,將其按照數值大小升序排列,所得序列的索引值構成一組符號序列S(j),總共可能出現m種排列,統計每一種排列出現的次數并計算出現的概率P1,P2…PK,據此計算時間序列的排列熵如公式(11)所示。

通過堆疊所有特征來形成雷達框架的特征集。
1.3.3 二分類器
以識別無患者在床狀態0與有患者在床狀態1為目標,以ROI區域特征與胸廓微小運動特征組成特征集合,使用支持向量機來對數據特征集實現二分類。
1.4 統計學分析
任選一患者采用本系統,在2 h內進行在床和不在床檢測。毫米波雷達在其左側、胸廓正中矢狀位、右側檢測患者不在床誤報率。其中誤報率為2 h有患者在床但毫米波雷達未測得患者次數占總測試次數百分比,即誤報率=無患者在床次數/總測試次數。
所有數據使用SPSS 20.0統計學軟件進行處理分析。兩組間各觀察指標中計量資料采用±s表示,使用t檢驗,P<0.05為差異有統計學意義。
選用最佳毫米波雷達安裝位置,并進行優化,統計觸發稱重系統清零精度。
2 結果
2.1 系統測試結果
毫米波雷達在距離患者正中矢狀位0.8 m左右進行掃描。圖6是其雷達檢測扇形圖。經過特征提取與可視化后,系統測試結果如圖7所示。

圖6 毫米波雷達檢測扇形圖
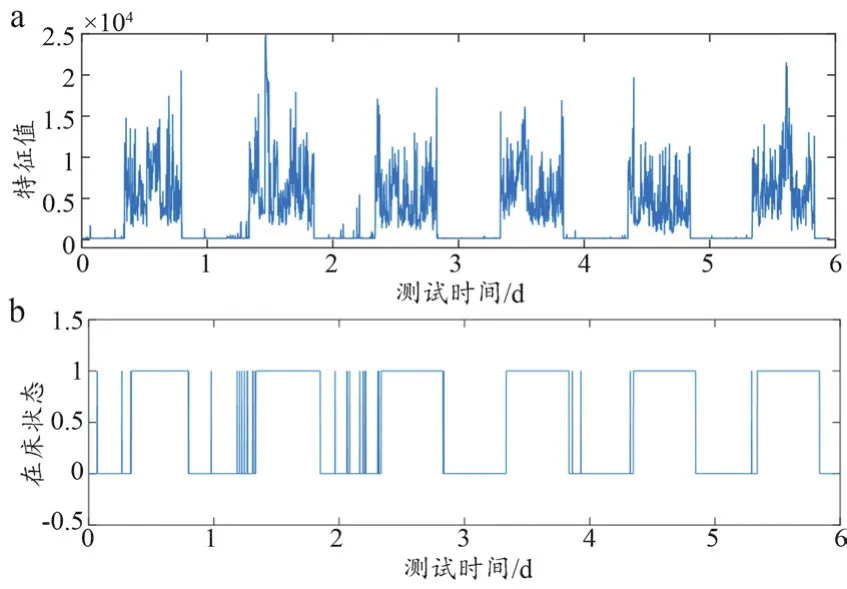
圖7 系統實測結果
經測試,當雷達位置在患者左側時,誤報率為24.25%±5.60%;在患者胸廓正中矢狀位時,誤報率為13.13%±2.23%;在患者右側時誤報率為26.50±8.60%。毫米波傳感器置于患者胸廓正中矢狀位方比置于其他位置的不在床誤報率低(t=0.62,P<0.05)。如圖8所示,毫米波傳感器固定于床頭,可有效降低誤報率。系統對在床狀態的識別精度>99%,極少出現誤識別為離床的情況,能夠保證不發生稱重系統錯誤清零的產生;另一方面,對于離床狀態的識別精度為96%,能滿足稱重系統及時清零要求。

圖8 稱重系統清零準確度分析
3 討論
重癥監護患者體重常用測量方法有兩種。一種應用帶稱重功能的監護床。進口的產品如Schneider等[6]使用的Hill-Rom監護床,其重復測量精度可達225 g(<75 kg)或75 g(>75 kg);國產的如DZ2000型智能電子稱重床[7-8],其重復測量體重精度達到±100 g,性能亦佳。它們在一般醫療場景使用時可帶來極大的方便,且可滿足臨床精度要求。但亦有不足之處:不能連續地記錄體重和校零不方便[3]。Davies等[9]在使用CRRT對液體平衡進行回顧性分析,發現很難完整連續記錄體重,尤其連續記錄5 d以上。常規稱重校零過程是醫護人員去除一切和體重無關的負載,進行校零。該過程需要醫護人員知曉稱重系統校零按鍵,提前知曉患者需稱重,且患者在進行呼吸治療、監護儀監測、微泵輸液時,還提前排除各種管道、導聯線、輸液皮管等干擾因素。但研究表明雖提前告知護士需要稱重校零,還會存在因重癥監護室復雜應用場景導致醫護人員疏忽忘記清零和不易校零的情況[9-10]。最終,醫護人員不得不抬起患者重新校零。JANET在模擬嬰兒使用呼吸機和不使用呼吸機時,測量模擬嬰兒體重,結果顯示有一定差異[11],間接說明校零時機很重要。另一種是采用電動移位機,如美國LIKO公司的GOLVO 700ES,但使用電動移位機時抬起患者,易牽拉患者治療的管路、導聯線等,不利治療[12-14]。
過門檢測可選用霍爾元件傳感器、視覺識別、毫米波雷達[15]。采用霍爾元件傳感器過門檢測時,當有其他設備(如超聲診斷系統、ECMO 系統、CRRT 機)經過時,將誤觸發過門信號,如此時有患者從轉運床過床到重癥病床上,系統將被誤校零。視覺識別,需要大量的圖像數據進行訓練,臨床應用周期加長。毫米波雷達可以通過實時掃描和識別區固定,彌補其他技術手段帶來的缺陷。
本研究通過毫米波雷達檢測患者不在床和轉運床過門,將校零觸發信號發送至稱重系統[16]。系統有以下三重優勢:① 該種非接觸式方法可有效防止重癥病房交叉感染;② 毫米波穿透特性可保證能穿透患者覆蓋的被褥,信號返回亦不受干擾;③ 不受環境影響,尤其熱源影響,如患者在使用醫用控溫儀和溫毯儀。總之,系統較好地解決臨床上易忽略的體重校零細節,為后續持續監測體重打下基礎。研究立足于臨床的實際應用,克服原監護床稱重系統不足,提高了獲得的體重精度。
4 結論
本研究使用毫米波雷達作為檢測手段,通過患者不在床和過門檢測,觸發監護床稱重系統校零,解決了臨床上易忽略的體重校零細節。后續將采用小波神經網絡等人工智能算法進一步提升患者不在床識別率,并根據患者在床主要特征值快速提取,提高識別速度,優化系統性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
