基于AHP-FKANO 模糊分析法的醫用消毒機器人設計評估
2022-04-25 07:16:44史蕊丹石元伍周俊杰曹潔
包裝工程 2022年8期
史蕊丹,石元伍,周俊杰,曹潔
(湖北工業大學,武漢 430068)
醫院是集合了患者、家屬和醫務工作者等人員的密集場所,其具有人流量大、人員復雜等特點,極易造成各種病原體傳播的風險,嚴重威脅到醫院內人員的安全。醫院感染不僅是醫療質量管理中的一個非常重要的問題,而且已成為日趨突出的世界公共衛生問題。根據相關研究表明,全球每年有數以億計的患者在接受醫療服務時發生感染而導致病情加重,更有甚者還會危及生命,并且由于患者的住院時間延長,將帶來患者的診療費用增加、醫務人員的工作量加重等一系列后果[1]。2019 年國內爆發了新型冠狀病毒肺炎(COVID-19),它是由新型冠狀病毒(SARS-CoV-2)引起的急性呼吸道傳染病[2],傳染性強且人群普遍易感。2020 年9 月24 日,青島市某醫院隔離觀察期間有人離開封閉區進入CT 室進行檢查,由于防護、消毒工作不規范,引發了院內外一系列感染問題,所以醫院環境質量和醫院內人員健康安全又一次引起了大家的高度重視。
醫用消毒產品能有效預防和控制醫院感染,為用戶提供一個更加健康、宜人的醫院環境。隨著科技的發展,現階段計算機技術和人工智能已經滲透到醫療領域的方方面面[3]。相比于傳統消毒產品及人工消毒,醫用消毒機器人具有消毒更徹底,以及高效、安全、靈敏等特點,因此越來越受到大家的關注。目前市面上的醫用消毒機器人多重視功能的實現,忽視了用戶的情感需求,造型同質化嚴重,導致用戶體驗感不佳。產品始終是為人服務,因此產品的研發和規劃需要以滿足用戶需求為核心基礎,以提高用戶滿意度為目標[4]。筆者通過AHP 與FKANO 組合賦權,綜合考慮用戶需求優先級和偏好,得到更加科學、合理的綜合權重[5],根據模糊數學理論對整體方案和各個指標分別進行評價,使產品設計評價更加合理、客觀。
1 醫用消毒機器人概述
醫用消毒機器人由微電腦控制,可實現實時實地監測醫院環境質量并做出反饋,能有效降低醫院感染率。產品主要分為感知監測模塊、控制操作模塊、移動模塊、消毒凈化模塊。
1)感知監測模塊。機器人通過安裝的測距傳感器、紅外線傳感器、VOC 傳感器、激光粉塵傳感器等各類傳感器來獲取室內空氣質量、自身的位置等基本信息,例如高精度傳感器檢測PM 2.5、甲醛、甲苯、溫度及濕度等多項指標,并通過監測指示燈的顏色變化來顯示實時、實地的環境質量。
2)控制操作模塊。微電腦通過對各種信息進行分析處理,并結合產品的功能按鍵和APP 遠程操作2種模式,來完成對產品功能的實現。
3)移動模塊。不同算法和類別的導航,其靈敏度和路線規劃的智能程度有很大區別,常見的導航方式按照靈敏度從大到小依次為dToF(時間飛行測距)>激光導航>視覺導航,3D 結構光的物體識別避障效果遠高于紅外傳感器,消毒凈化模塊細分為消毒與凈化2 個子模塊。
4)消毒方式主要分為物理消毒和化學消毒兩大類,筆者以物理消毒方式——紫外線燈進行消毒為例,凈化模塊依據不同科室的位置和環境,來設置不同的凈化功能模塊。產品主要工作流程見圖1。
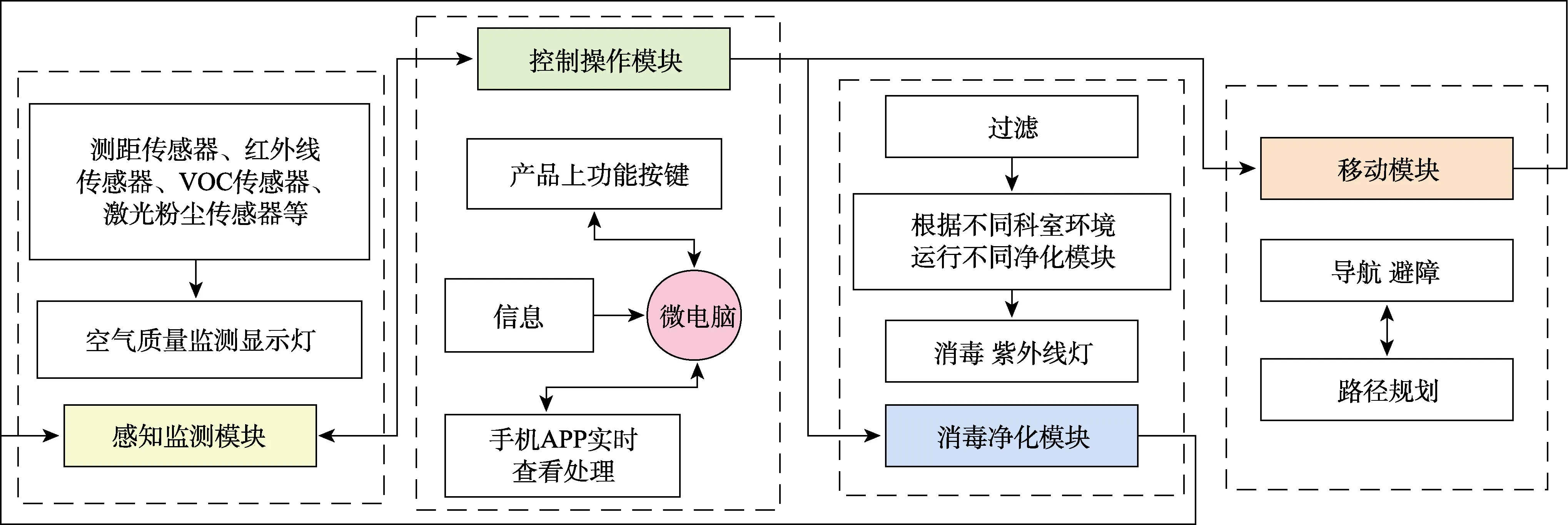
圖1 產品主要工作流程Fig.1 Main work flow chart of the product
1.1 用戶需求分析
用戶需求的獲取是產品設計的關鍵和前提,因此獲取產品需求信息時,一般要遵循全面性、深入性、廣泛性、突出性和建議性5 個原則[6]。首先通過前期調研確定初始指標,其次通過公信度評測將值低于0.5 的指標進行剔除,最終構建出醫用消毒機器人的設計方案評價指標體系。
1.1.1 初始評價指標
通過對醫用消毒產品的特征市場進行調研,并查閱相關文獻資料,在醫院采用實地觀察法對目標進行一段時間的調研,同時也對醫院工作人員、患者和家屬進行半結構化訪談,并對專家和用戶進行問卷調查。通過有針對性地制訂調研問卷可以發現,用戶對醫用消毒機器人的需求主要集中在以下幾個方面:智能監測及反饋功能,產品內置感應器,可以實時、實地智能監測當前環境質量并快速做出反饋;消毒凈化功能結構模塊,產品主要通過紫外線燈進行消毒,紫外線不能直接與用戶接觸,在實現產品功能結構時,需要考慮安全性;操作界面設計,由于產品具有特殊性,所以需要由專業人員進行操作,APP 界面風格簡約符合醫院的環境定位,可以使專業人員操作更加高效;考慮到產品在白天也會工作,因此噪音要小,以提供宜人的醫院環境;產品造型簡潔、大方,色彩干凈、柔和。
共收集23 個初始指標,并將安全性、舒適性、便利性指標作為醫用消毒機器人設計評價指標體系的一級指標。
1.1.2 最終評價指標
選用公信度評測方法對指標進行篩選[7]。邀請專家團隊120 人,包括醫護人員、病患、家屬、醫院采購人員、技術人員及設計師。通過問卷形式,讓專家團隊從23 個初始評價指標中選擇對產品本身有重要影響的評價指標,共發出110 份問卷,去掉3 份不合理的問卷,得到107 份有效問卷。指標公信度公式如下:

式(1)中,H為指標公信度;G為選擇該指標的專家人數;N為有效問卷的數量。剔除H值低于0.5 的指標,最后得到9 個子準則層指標,分別為結構合理A1、技術成熟A2、專人操作A3、造型美觀B1、色彩柔和B2、低噪音B3、實時監測C1、及時反饋C2和交互界面C3,見表1。
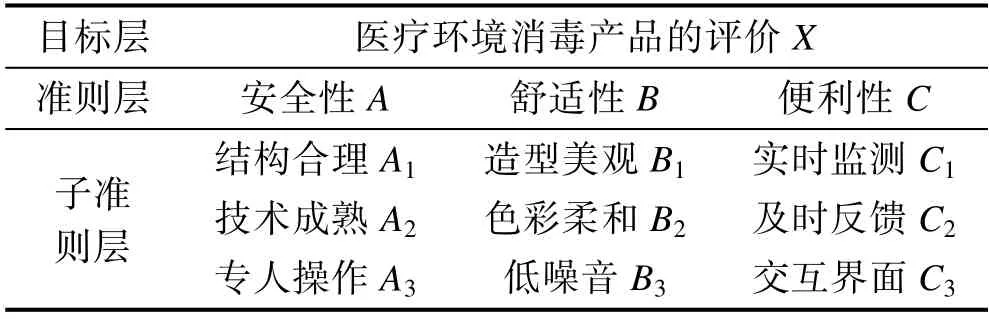
表1 醫用消毒機器人設計方案評價指標體系Tab.1 Evaluation index system for design scheme of medical disinfection robot
2 基于AHP-FKANO的模糊評價法設計思路
評價設計思路分為2 個階段,即用戶需求分析階段和設計評價階段。需求分析階段:首先通過層次分析法對需求進行分階判斷、權重計算、一致性檢驗等。FKANO 通過對用戶需求進行模糊卡諾問卷,根據卡諾評估表進行評估,得到模糊KANO 調查結果表,對用戶需求屬性進行分類,并確定屬性系數。最后用FKANO 得到的屬性系數來修正層次分析法獲得的初始權重,從而得到綜合權重。設計評價階段:專家根據評價集對產品指標進行打分,并構建模糊關系矩陣,各評價指標綜合權重和對應評價指標的模糊關系矩陣通過合成運算,進而得到綜合評價結果向量。基于AHP-FKANO 的模糊評價法設計思路見圖2。
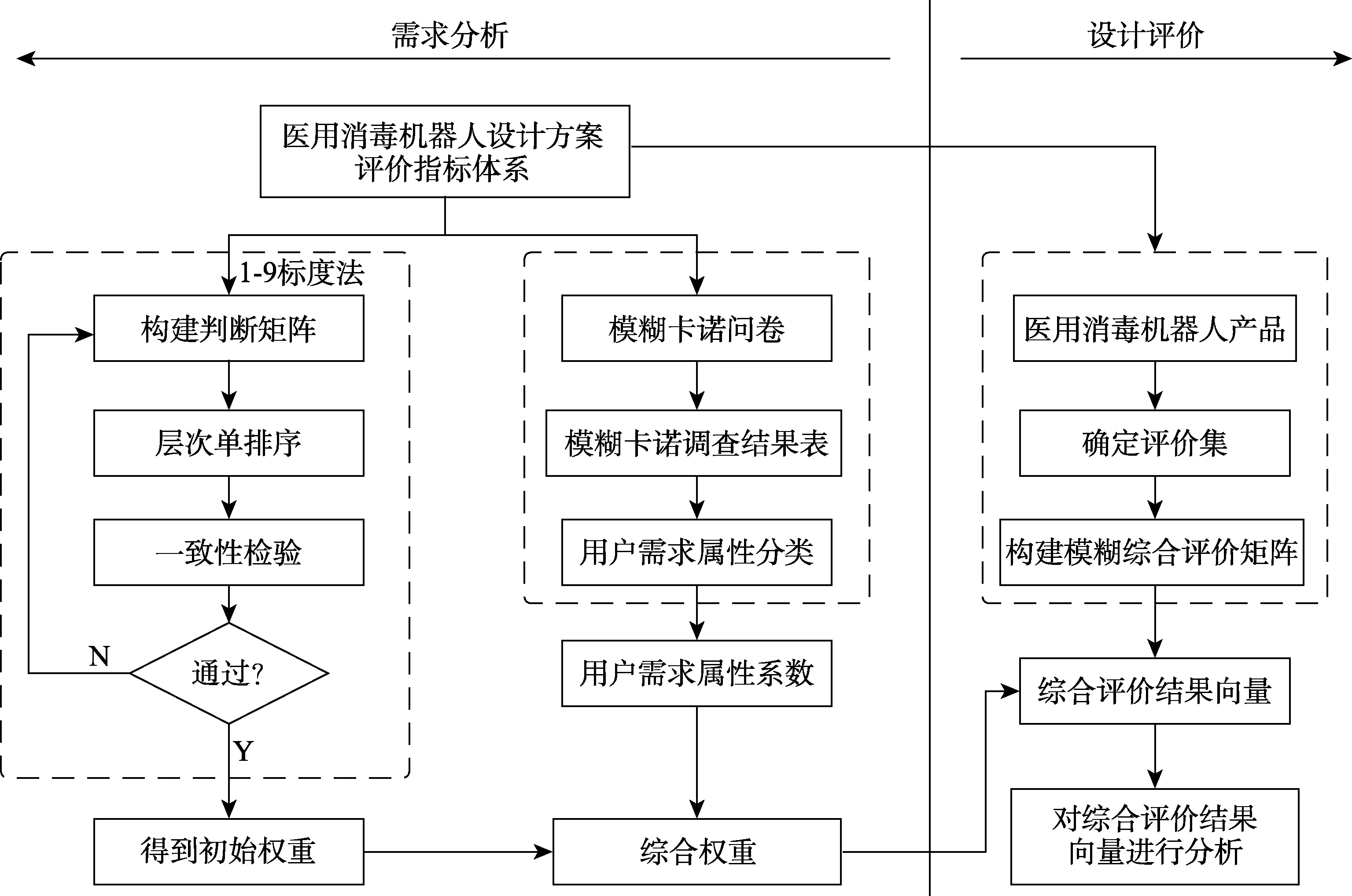
圖2 基于AHP-FKANO 的模糊評價法設計思路Fig.2 Design idea of fuzzy evaluation based on AHP-FKANO
2.1 模糊綜合評價法
模糊綜合評價法是一種基于模糊數學的綜合評價法,能有效減少評價主體的主觀因素和不確定信息對決策過程的影響,使評價過程更加客觀、合理[8-9],因此常用來解決多屬性評價與決策中的指標權重問題。具體評價過程如下。
1)確定評價指標集P= {p1,p2,… ,pm}。
2)確定評語等級評價集V= {v1,v2,… ,vn},評價等級一般為很滿意、滿意、一般、不滿意、很不滿意。
3)建立模糊關系矩陣:
4)確定各評價指標的權向量:W= (w1,w2, …,wm)。
5)合成模糊綜合評價結果向量:
2.2 權重的確定
2.2.1 層次分析法確定初始權重的方法
層次分析法是由美國運籌學專家Saaty 在1970年提出的一種解決多目標復雜問題的決策方法。它是將與決策有關的指標分成目標層、準則層、子準層等,然后進行定性與定量相結合的分析決策[10]。采用1—9 標度法(見表2),對評價體系中各評價指標進行兩兩比較,以此構建判斷矩陣,然后把判斷矩陣的最大特征向量的分量作為相應的系數,最后計算出準則層和各子準則層評價指標所對應的權重。AHP 法計算權重共有4 種方法[11]:特征向量法、最小二乘法、幾何平均法、算術平均法。以下選擇常用的算術平均法,具體步驟如下所述。
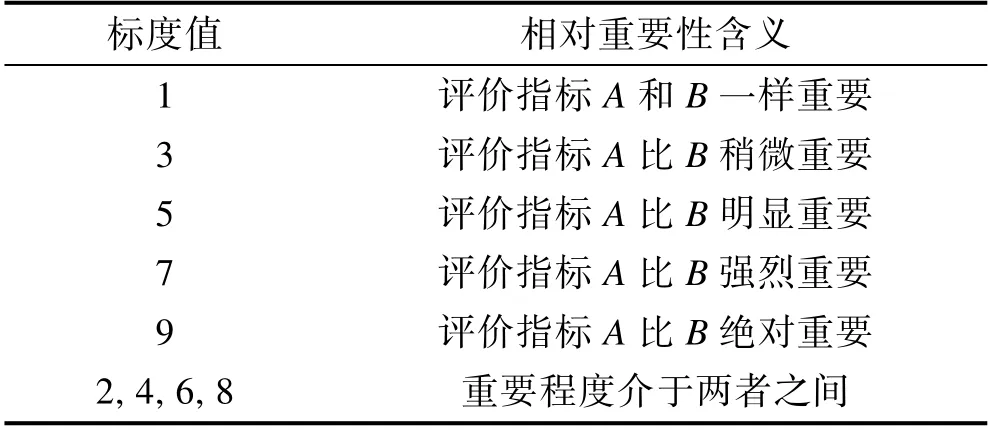
表2 元素相對重要性的比例標度Tab.2 Scale of relative importance of elements
1)對判斷矩陣每列元素做歸一化處理:

式中:i,j= 1,2,… ,n。
2)按行相加歸一化后的判斷矩陣:

3)將相加得到的向量歸一化處理,即為近似特征根:

4)進行一致性檢驗:

式中:CR為判斷矩陣的一致性指標;λmax為最大特征值;n為判斷矩陣階數。

式中:CR為判斷矩陣的一致性比率;RI為隨機一致性指標;
當CR<0.1 時,即認為判斷矩陣具有滿意的一致性,否則就要重新調整矩陣。1—9 階RI值見表3。

表3 1—9 階判斷矩陣RI 值Tab.3 RI value of judgment matrix of order 1-9
2.2.2 FKANO 確定的調整系數
模糊卡諾是針對傳統KANO 模型對用戶需求滿意度具有的模糊性特點而提出來的。傳統Kano 模型只允許顧客選擇一個最滿意的答案,見表4。模糊Kano 調研允許顧客對不止一個選項給予滿意度數值,用區間[0,1]內的某個模糊滿意度值,來表示用戶對產品各指標的滿意度[6],每行數值和為1,從而使顧客的需求分類調查更加準確,見表5。KANO 模型將用戶需求分為5 類:興奮型需求A、期望型需求O、無差異型需求I、反向型需求R、必備需求M[12]。具體步驟:采用模糊卡諾問卷調查表進行調研;根據Kano 評估表,使用頻數最大法確定評價指標所屬類別,見表6;確定顧客滿意程度的屬性系數λj(j=1,2, …,m)。λj值由評審專家依據經驗來選取[8,13],卡諾類別A、O、M、I 對應的屬性系數λj值分別取3、2、1、0。

表4 傳統卡諾問卷調查Tab.4 Traditional Kano questionnaire
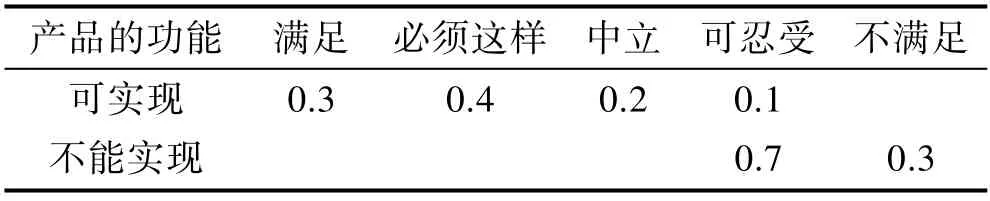
表5 模糊卡諾問卷調查Tab.5 Fuzzy Kano questionnaire
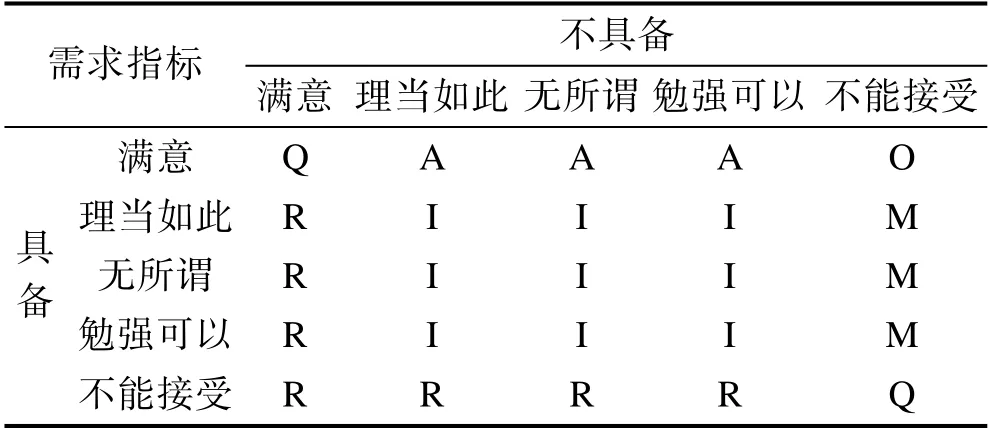
表6 Kano 評估Tab.6 Kano assessment
2.2.3 綜合權重確定的方法
層次分析法得到的初始權重為wj,模糊KANO得到權重調整系數為λj,可以得出各個評判指標的最終權重wajdj如下:

3 實例驗證
3.1 評價對象
根據前期調研結果,并將已有的計算機技術和人工智能結合到具體設計方案中,根據安全性A、舒適性B、便利性C等3 種設計要素對醫用消毒機器人進行分析設計,見圖3—5。
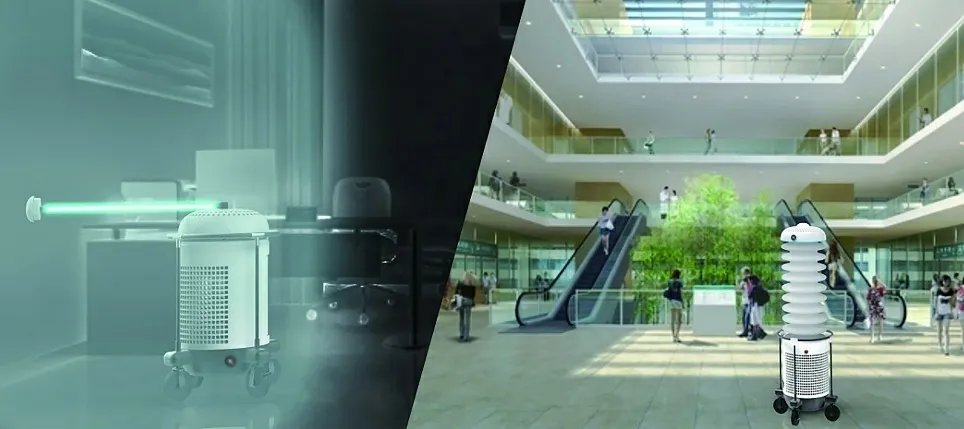
圖3 產品工作場景Fig.3 Product work scenario diagram
1)安全性A。產品側面進風,上端出風;產品中部側面設有紅色緊急開關按鈕,并且手機APP 操作有權限設置;通過按壓可以打開濾網模塊控制板,方便后期維護;智能監測模塊通過高精度傳感器可以靈敏檢測PM2.5、甲醛、甲苯、溫度及濕度等多項指標,并通過監測指示燈顏色變化可以顯示實時實地的環境質量;升級版的dToF 模組激光掃描的建圖速度更快,且不再需要激光發射孔和接收孔,還能做成全封閉式的,可以防止落灰引起的硬件故障,產品底部側面的前部是3D 結構光傳感器模組,可以精確感知前方物體形態數據,實時、精準避障,使建圖和避障的可靠性更高;出風口下的彈性保護外殼在微電腦控制下可以伸縮,有人時,紫外線燈不裸露,只對空氣進行消毒,無人時,紫外線燈可以裸露并且能在智能系統控制下旋轉90°,對物體表面和空氣都能進行全面、徹底的消毒;根據醫院不同科室位置、環境的不同,設置5 種凈化功能模塊,分別為HEPA 模塊、活性碳模塊、ACF 模塊、光催化模塊及負離子模塊,模塊化的設計可以方便專業人員進行更換;考慮到產品的使用環境,以及服務的用戶的特殊性,專業工作人員可以通過APP 實時實地查看,使操作更加高效、安全。產品所使用的傳感技術、智能控制技術、路徑規劃技術、計算機技術及對應的傳感器、控制器等已廣泛應用于各種高端、智能產品,例如人臉識別手機、無人駕駛汽車、掃地機器人等。
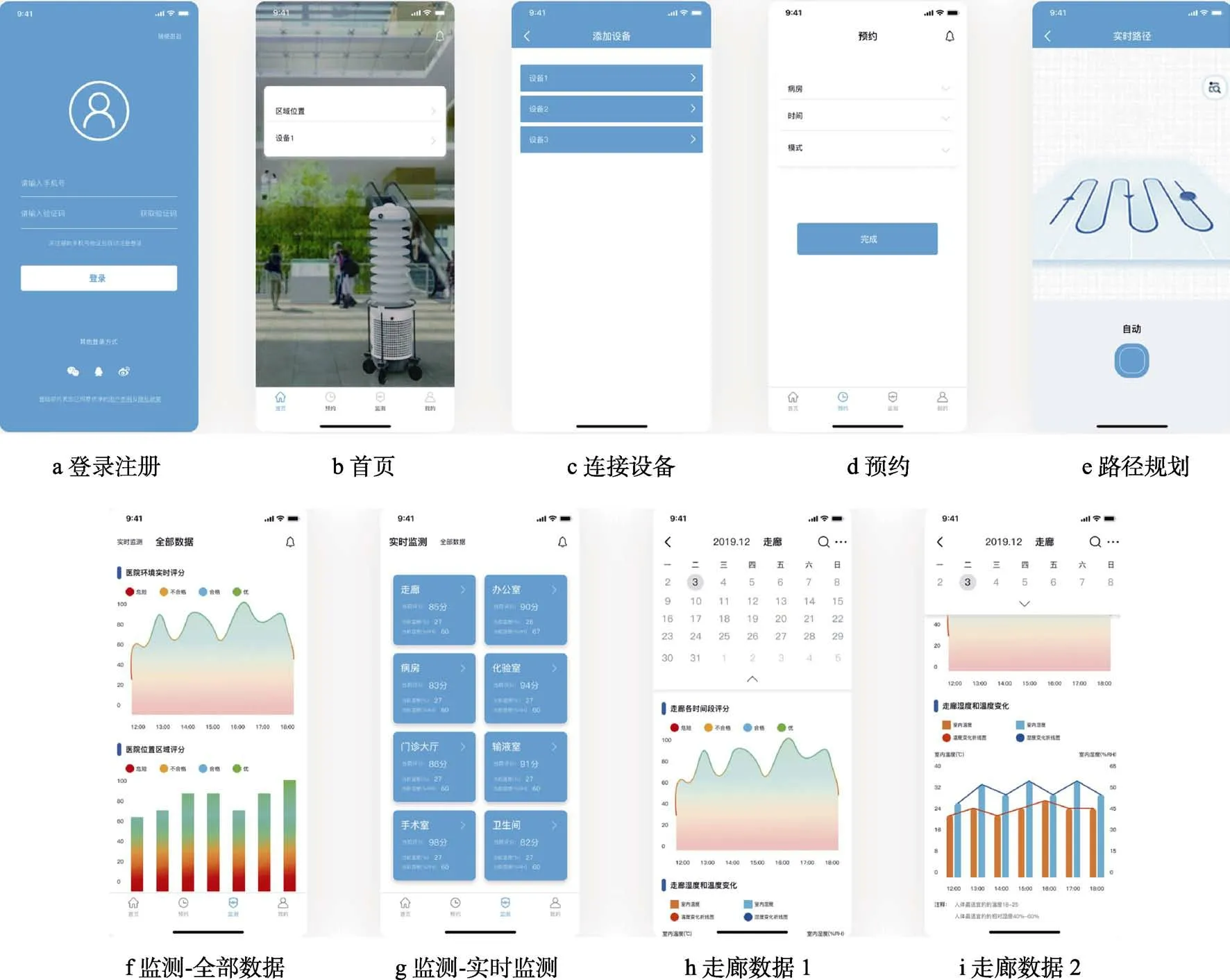
圖5 醫用消毒機器人APP 界面(部分)Fig.5 APP interface of the medical disinfection robot (partial)
2)舒適性B。產品的外觀造型以簡單圓柱體為主,無多余裝飾,整體流暢、平滑、簡約;產品主體采用白色ABS 塑料,局部搭配黑色、銀色和紅色,保護外殼為彈性復合PVC 材質,輪子為黑色ABS+聚氨酯橡膠,產品整體與服務的環境和用戶有較好的融合,給人以專業、安全、信賴的感覺[14];產品的消毒、凈化工作主要分為主動和被動2 種,該產品采用被動式,即通過風機將產品周圍空氣吸入產品內部進行過濾、凈化、消毒后排出,產品主要的噪音來自產品內部的風機,安裝低分貝的風機,能有效降低噪音。
3)便利性C。高精度傳感器可以實時實地監測環境質量,擁有產品頂部監測指示燈顏色變化和手機APP 顯示2 種反饋形式;產品APP 界面分為首頁、預約、監測和我的4 個一級頁面,界面風格高效、簡約,顏色以藍色和白色為主,整體設計符合醫院環境,一級監測頁面有實時監測和全部數據2 個頁面,可以方便專業人員查看醫院整體和醫院具體位置的空氣質量,二級監測頁面的日期模塊采用折疊設計,可以便于專業人員進行查看及操作,數據信息通過可視化表現,能幫助專業人員實時實地更高效地監測、分析醫院環境,并作出反饋。
3.2 層次分析法確定設計方案評價指標初始權重
邀請25 名專家,并運用1—9 標度法對圖3—5的醫用消毒機器人的產品評價體系中的各評價指標進行兩兩比較,從而構造判斷矩陣,并依據式(4)—(9)進行計算,得到安全性、舒適性、便利性權重,并對其一致性進行檢驗,見表7。
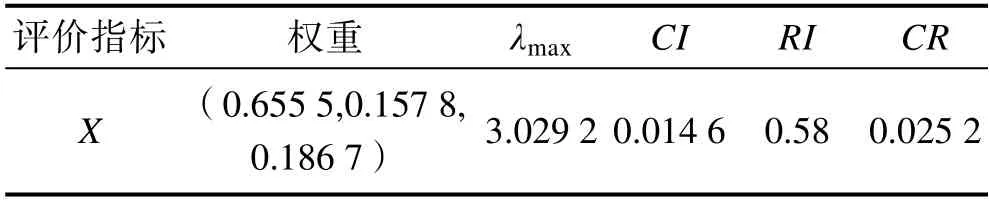
表7 準則層指標權重及一致性檢驗Tab.7 Index weight and consistency test of criterion layer
根據表7 可知,一級評價指標對應的判斷矩陣的CR 值小于0.1,一致性檢驗通過。同理計算出子準則層的權重并進行一致性檢驗,見表8。
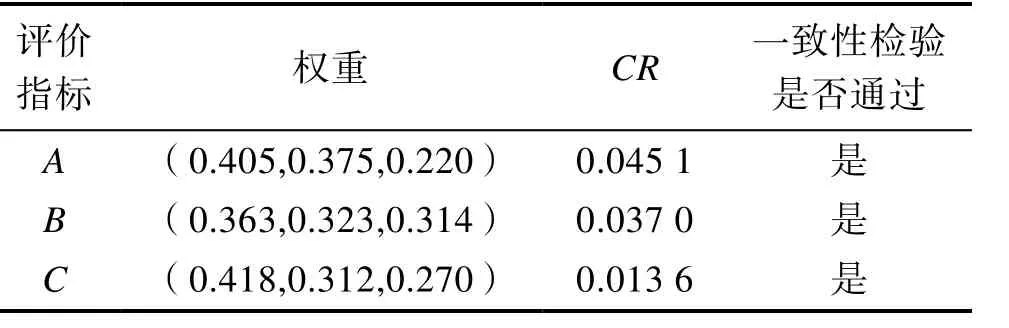
表8 子準則層指標權重及一致性檢驗Tab.8 Index weight and consistency test of sub criteria layer
3.3 FKANO 確定屬性系數
針對用戶情感偏好,采用FKANO 模型進行需求分類。邀請120 名專家,通過發放FKANO 問卷來獲取實驗數據,去掉3 份不合理問卷和2 份空白問卷,得到有效問卷115 份。對結果進行統計分析,見表9。
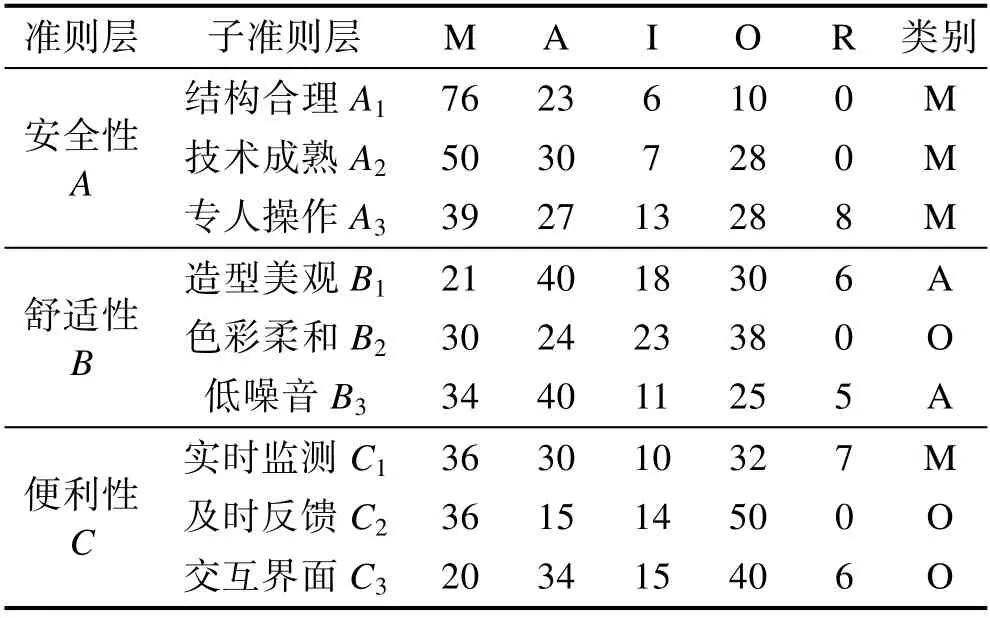
表9 模糊Kano 調查結果Tab.9 Fuzzy Kano survey result
由表9 的統計結果可得出,必備需求M 包括:結構合理A1、專人操作A3、實時監測C1和技術成熟A2。期望型需求O 包括:色彩柔和B2、及時反饋C2和交互界面C3。興奮型需求A 包括:造型美觀B1、低噪音B3。
3.4 綜合權重確定
將層次分析法得到的初始權重和FKANO 得到的屬性系數代入式(10)求得綜合權重,見表10。
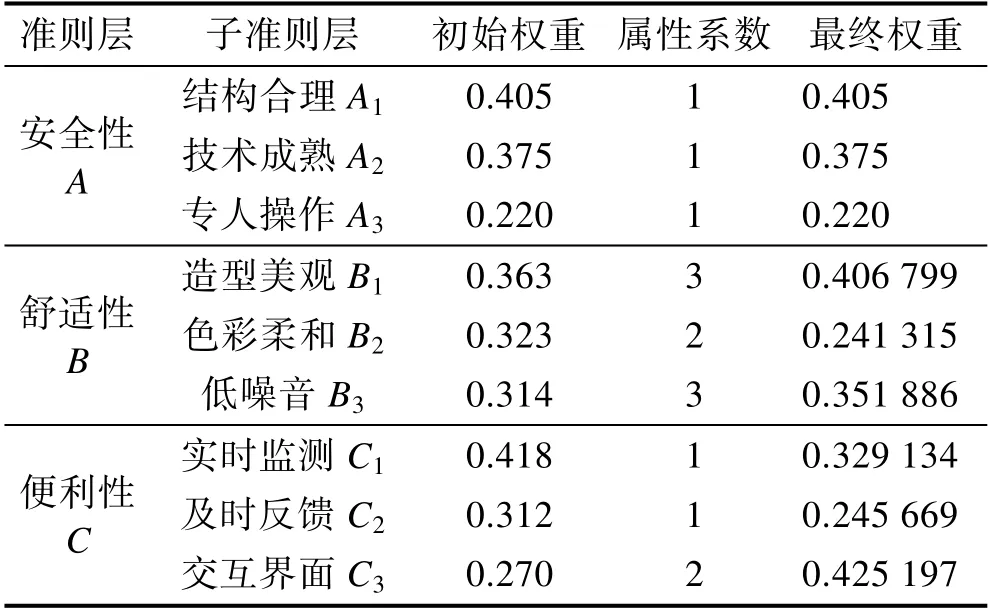
表10 各指標權重調整Tab.10 Weight adjustment for each indicator
3.5 方案模糊綜合評價
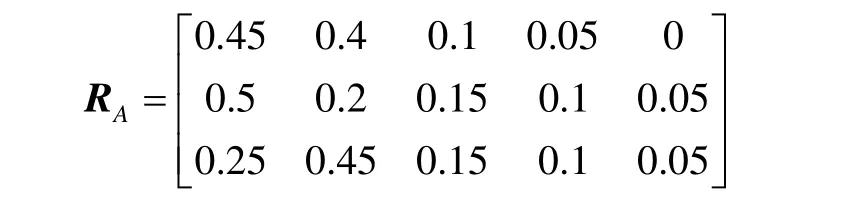
依據李克特量表5 分制量化各個指標的用戶滿意度[15],V={很滿意,滿意,一般,不滿意,很不滿意}={5,4,3,2,1},邀請專家分別對每個指標進行等級打分,數據歸一化處理后評價結果如下。
安全性綜合評價變換矩陣:
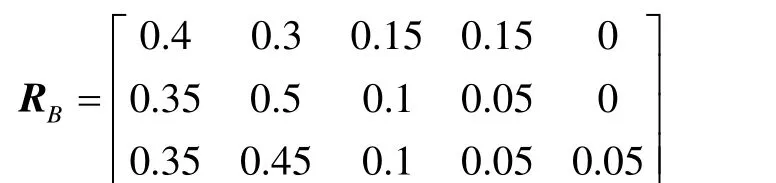
舒適性綜合評價變換矩陣:
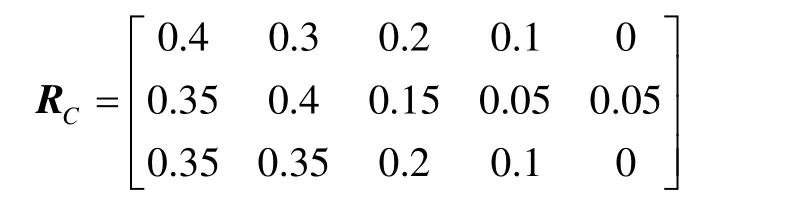
便利性綜合評價變換矩陣:
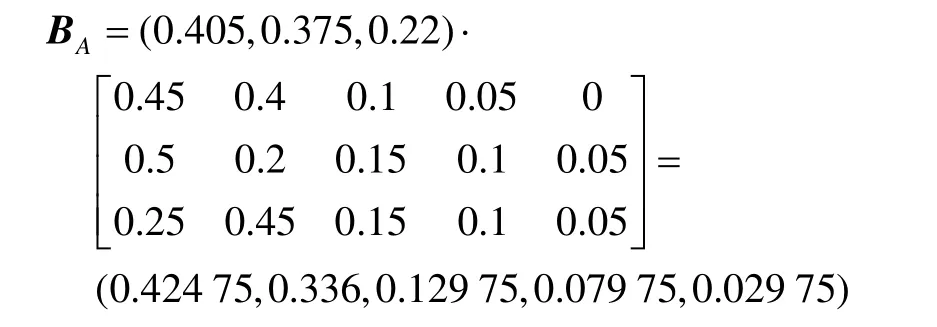
通過式(3),可得出安全性評價向量:
舒適性評價向量:
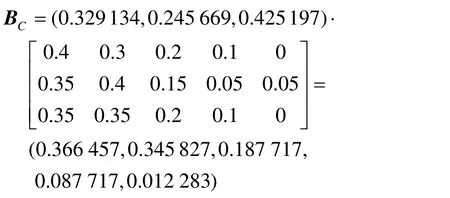
便利性評價向量:
由此可構造出總體指標模糊綜合評價矩陣:
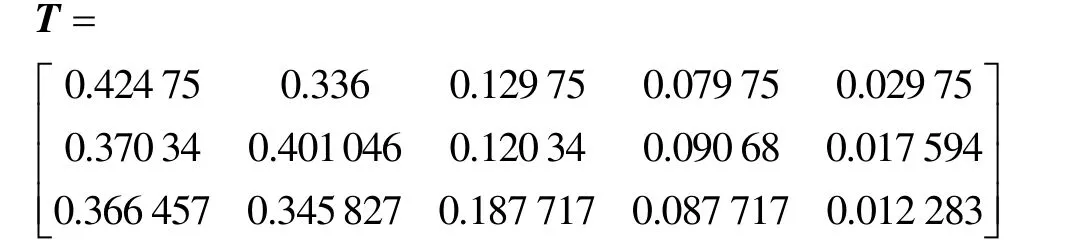
該款醫療消毒機器人的最終評價向量:
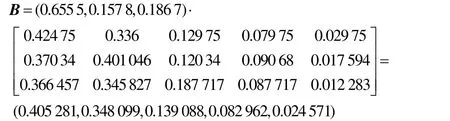
結果表明,40.528 1%的評估者對該方案整體評價很滿意,34.809 9%的評估者對該方案整體評價滿意,13.908 8%的評估者對該方案整體評價一般,8.296 2%的評估者對該方案整體評價不滿意,2.457 1%的評估者對該方案整體評價很不滿意,按照最大隸屬度原則,這款醫用消毒機器人的綜合評級結果為很滿意,驗證了該方案具有一定的科學合理性。
為了更直觀地看到用戶對不同指標的滿意度,并對設計方案做進一步分析和改進,將各向量根據評價等級分數表,算出各評價因素的具體評價值見表11。
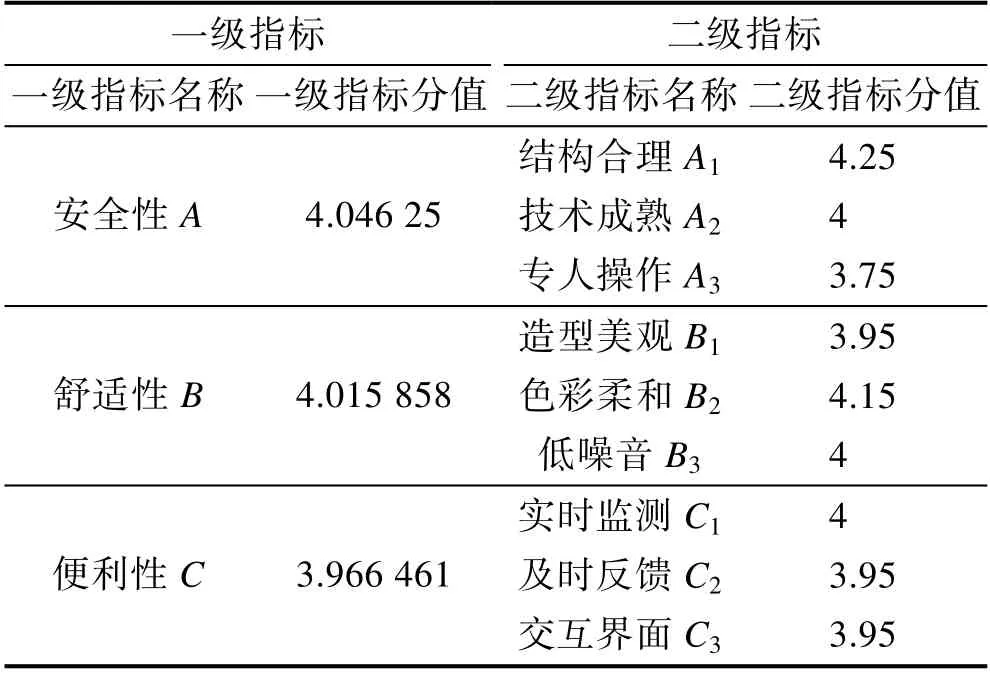
表11 各指標權重評分值Tab.11 Weight value of each index
根據表11 各指標評價值可知,一級指標安全性A的評價值為4.046 25,舒適性B的評價值為4.015 858,便利性C的評價值為3.966 461,用戶對產品方案安全性和舒適性比較滿意。對二級指標層評分發現,結構合理A1、色彩柔和B2這2 個指標用戶滿意度較好,而技術成熟A2、低噪音B3、實時監測C1分值為4,表明這3 個方面的設計基本符合用戶的要求。其他指標的分值處于一般等級,且分值都接近4,說明這些指標可以通過進一步分析來改進,從而得到更高的用戶滿意度。
4 結語
在醫用消毒機器人設計中,由于該產品服務的環境和用戶具有特殊性及復雜性,所以需要采用更加客觀、科學、可量化的方法來進行評估。文中通過層次分析法來確定各指標權重,帶有主觀性且未能準確反映用戶真實需求的不足,引入模糊卡諾法對其進行修正,可以幫助決策者更加科學、準確地對設計方案進行評價。基于AHP-FKANO 模糊分析法對產品設計方案進行綜合性和細致化的評價,能夠直觀地分析出用戶需求優先程度和不同需求的情感偏好,方便后續有針對性地結合技術來深入改進產品,從而提高用戶滿意度,并提升產品市場競爭力。后續筆者將從2 個維度進行深入分析:時間維度,為了延長產品生命周期需要考慮動態變化的用戶需求,并結合大數據和深度學習,以得到需求變化軌跡,從而為后續優化產品設計提供數據參考;空間維度,分析不同地區的用戶需求和偏好的差異,并結合地區經濟、環境等特征要素,分析差異的根源,更加全面、客觀地了解用戶需求和偏好。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
Coco薇(2015年1期)2015-08-13 02:23:50
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
創業家(2015年5期)2015-02-27 07:53:25
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
玩具(2009年10期)2009-11-04 02:33:14