車載車輛原地調頭裝置的研究
2022-04-24 01:29:04李中澤李敏敏
商用汽車 2022年12期
關鍵詞:作業
李中澤 李敏敏 王 瑞
(濟南薩博特種汽車有限公司,山東濟南,250200)
0 引言
中重型車輛由于自身尺寸較長,轉彎半徑大,受道路寬度限制,在狹窄路面無法隨時調頭,需要尋找寬闊的路面或合適的路口進行調頭。應急救援車輛在救援現場難以在雜亂的場地上快速調頭,不利于快速開展救援作業;軍用車輛難以在戰場等復雜環境下的路面上快速調頭,嚴重影響官兵及時高效地完成作戰任務。因此,中重型車輛急需一種自動化的車載車輛原地調頭裝置,解決車輛在狹窄路面原地掉頭的難題。
1 現狀
1.1 民用車輛
目前,民用中重型車輛的原地調頭裝置中,國外某公司研制了礦用鉸接自卸車輛快速調頭機構。該機構在后橋前設計2 個調頭用的輪子,輪子由液壓缸控制,行駛時可以收在腹下,調頭時可以放下并將后輪頂起。該輪子軸線與后橋成90°角,不需要其它機構傳動。需要調頭時,司機旋轉方向盤左轉,汽車左轉,汽車前后部軸線夾角到極限位置時,立即操縱液壓機構,使2 個調頭輪子著地,可將汽車后橋頂起并使后輪離開地面。司機旋轉方向盤右轉,汽車后部在2 個轉向液壓缸作用下,繞著鉸接點作圓弧運動。汽車后部旋轉到極限位置時,立即收起調頭輪子,司機只需按上述調頭步驟操作2次,就可以完成調頭過程[1]。該車輛原地調頭裝置只限于鉸接車輛,無法應用于其他中重型車輛原地調頭。
1.2 軍用車輛
軍用中重型車輛有一種比較簡單高效的原地掉頭方式。當車輛需要調頭時,車上人員下車,官兵取下車輛配備的機械千斤頂和枕木,在車輛底部整車重心位置支撐車輛,然后,2 名官兵從車輛前部和后部分別抓緊車輛進行控制,通過自身重力和舉升力調節整車狀態,使所有車輪離地,保持車輛相對地面平行。2 名高官兵在保持車輛狀態的同時,推動車輛旋轉進行車輛原地調頭,車輛旋轉至預期方向時,操作機械千斤頂降落,取回機械千斤頂和枕木,完成車輛原地調頭作業,如圖1 所示。但是,這種車輛原地掉頭方式也存在一些缺點,自動化程度低,至少需要2 名官兵同時操作,且機械千斤頂支撐面小,車輛升起后不穩定,需人工調節,存在安全隱患,不能應用于整備質量較大的重型車輛,有一定的局限性。

圖1 軍用中重型車輛原地掉頭展示
2 需求分析
中重型車輛的原地調頭裝置進行調頭作業時環境多樣,需要充分考慮各種情況下存在的難題。并且,中重型車輛結構復雜,原地調頭裝置的設計需要不影車輛性能。在裝置的設計過程中需要考慮以下幾點需求:
(1)作業環境存在坑洼等路面不平整的情況,設計時需盡量減少原地調頭裝置作業時與地面接觸面,提高裝置的環境適應性。
(2)車輛在安裝原地調頭裝置后不能影響車輛的正常行駛,并且避免與傳動軸干涉,在裝置結構設計時采用支撐油缸、調節油缸偏移設計和折疊伸縮結構,解決與傳動軸位置干涉,保證整車的通過角。
(3)受貨物裝載情況、油液加注情況等影響,中重型車輛存在重心位置不穩定的情況,設計時需要考慮重心的位置變化,確保重心位置在支撐面內,提高裝置的可靠性。
(4)中重型車輛在傾斜路面調頭時,車輛旋轉過程必須隨時調整姿態,防止車輛旋轉過程與地面干涉,需要增加姿態調整功能,使車輛旋轉在過程中能夠始終平行于地面。
(5)整個作業過程需要實時監控車輛狀態,及時采集數據,裝置在設計過程中加裝傳感器和中央處理器,中央處理器將傳感器采集的車輛狀態數據進行計算,轉化為控制信號傳遞到各工作元件,能夠及時調整動作或停止作業,保證車輛安全。
(6)車載原地調頭裝置整體采用自動化設計,同時設有手動模式,滿足車輛調頭的需求,具有高效安全,操作簡單的特點。
3 車載車輛原地調頭裝置的設計
3.1 組成
車載原地調頭裝置由支撐油缸、調節油缸、液壓泵、液壓馬達、電動機、油箱、底座、吊耳、陀螺儀、中央處理器、控制器、液壓閥、管線路等組成,如圖2 所示。
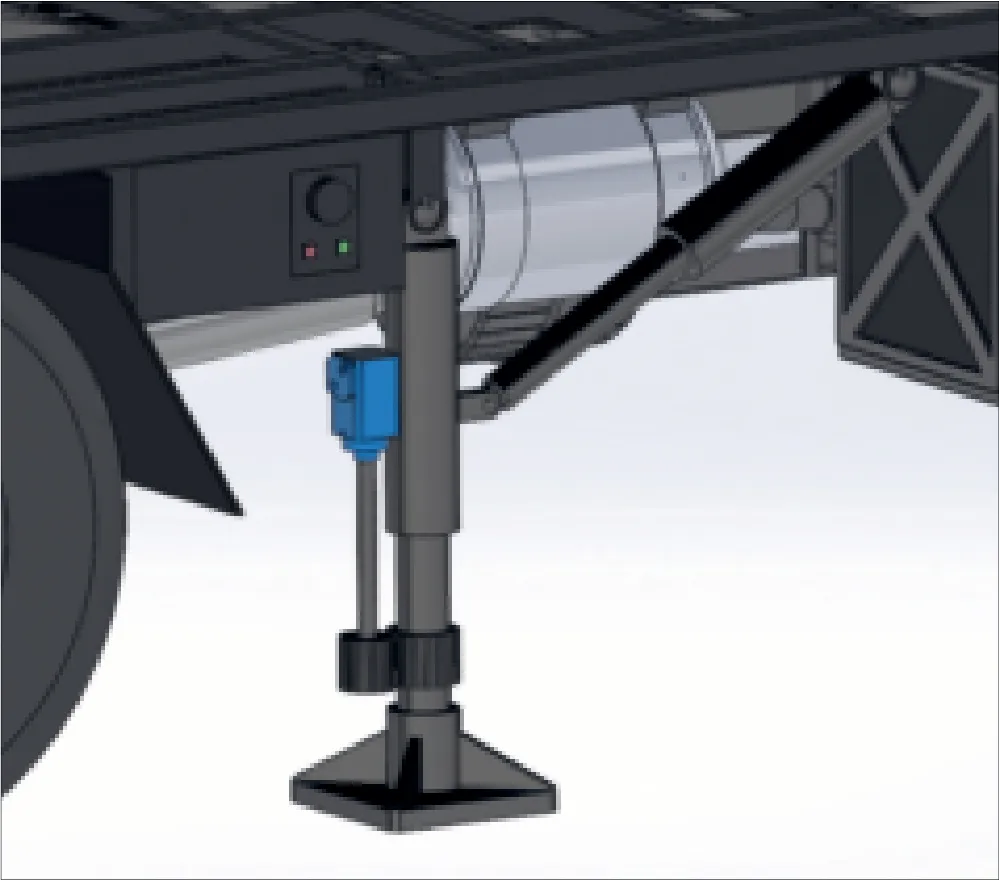
圖2 車載車輛原地調頭裝置外觀圖
3.2 結構設計
該車載車輛原地調頭裝置的支撐油缸和調節油缸通過2 對吊耳安裝在底盤大梁之間中心線右側的位置,避免與傳動軸干涉。調節油缸與支撐油缸通過吊耳連接,用于控制支撐油缸的收放和車輛角度的調節。支撐油缸下端安裝位置偏移的底座,使底座的中心設置在車輛的重心處,具有平衡和支撐作用。液壓馬達安裝在支撐油缸上,通過齒輪使支撐油缸相對底座轉動,從而達到車輛旋轉調頭的目的。電動機、油箱、陀螺儀、中央處理器、控制器集成后安裝在副車架右側的下部,便于操作人員操作。該裝置設有自動和遙控手動模式,可隨地根據情況切換至遙控手動模式進行控制。
車輛行駛時,原地調頭裝置收縮于車架下部。需要原地掉頭時,操作人員觀察車輛所在環境的地形,初步判斷是否滿足調頭條件,確定車輛需旋轉的角度。然后,操作控制器上水平設置的標有角度的旋轉操控按鈕,將按鈕旋轉至最終角度方向,此時鈕旋將指令傳遞給中央處理器,中央處理器采集陀螺儀測量的車輛前后和左右傾斜角度,根據車輛前后和左右傾斜角度判定該位置是否滿足調頭條件,確定滿足調頭條件后,中央處理器根據前后傾角參數,利用控制算法進行計算,通過信號放大器將控制信號傳輸至換向電磁閥,通過對換向電磁閥控制,實現油缸伸縮及液壓馬達的控制。
3.2.1 車輛舉升
車載車輛原地調頭裝置作業時,首先調節油缸伸張,在調節油缸的推動下支撐油缸圍繞吊耳旋轉達到豎直狀態,然后支撐油缸伸張至地面,將車輛頂起離地,車輛舉升的過程中央處理器實時采集傾角傳感器測量的車輛前后和左右傾斜角度,確保車輛安全。如舉升過程中由于支撐油缸底座不平穩導致傾角不滿足舉升條件,作業立即停止,支撐油缸收縮,調整位置后再次舉升。
3.2.2 車輛旋轉
車輛舉升至合適的離地高度后支撐油缸狀態固定,控制器設定的旋轉角度由中央處理器計算后,將相應信號傳遞給換向電磁閥,驅動固定在支撐油缸壁上的液壓馬達旋轉。液壓馬達通過齒輪軸連接支撐油缸伸縮桿上的底座,驅動支撐油缸壁相對底座旋轉,使車輛旋轉至設定的方向。
3.2.3 狀態調整
旋轉過程中,陀螺儀將監測信號傳遞給中央處理器,中央處理器通過信號放大器將控制信號傳輸至換向電磁閥,實現調節油缸伸縮的實時控制,持續調整車輛前后角度,使車輛達到相對地面平行狀態,保證車輛在有一定傾斜度路面也能夠正常旋轉。
3.2.4 車輛降落
車輛完成旋轉后支撐油缸收縮,車輛降落到地面,然后調節油缸收縮,將支撐油缸收縮于車架下部與車架平行,原地調頭裝置完成作業,達到回收狀態,車輛完成原地調頭。
3.3 液壓系統原理
液壓系統的電動機與液壓泵連接,液壓泵向液壓系統提供高壓液壓油,將油箱的液壓油傳遞到各路換向電磁閥,中央處理器操控各路換向電磁閥將液壓油分配到調節油缸、支撐油缸和液壓馬達等各個液壓工作元件,即可完成所需的各種作業動作,如圖3 所示。液壓系統設有溢流閥,能夠保證系統安全。
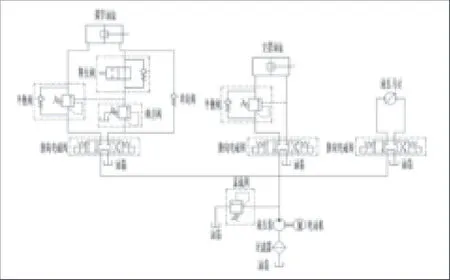
圖3 車載車輛原地調頭裝置液壓系統組成及工作原理圖
車載車輛原地調頭裝置開始原地調頭作業時,控制器將指令傳遞給中央處理器,中央處理器傳遞信號啟動電動機,電動機帶動液壓馬達旋轉,將液壓油從油箱中抽出,經過過濾器過濾后進入液壓泵,液壓泵將液壓油輸出,經過單向閥后,到達各路換向電磁閥,通過操控各路換向電磁閥,將油液分配到調節油缸、支撐油缸和液壓馬達等各個液壓工作元件,以完成調頭作業所需要的各種動作。
3.3.1 車輛舉升
中央處理器將電信號傳遞給調節油缸油路的換向電磁閥,使換向換向電磁閥從中位切換至左位。液壓油經過換向電磁閥到達平衡閥,然后抵達調節油缸,使調節油缸伸張,推動支撐油缸沿耳軸向下旋轉至豎直方向,中央處理器控制換向電磁閥至中位,調節油缸停止運動。然后,中央處理器控制支撐油缸向換向電磁閥從中位切換至左位,液壓油經過換向電磁閥到達平衡閥,然后抵達支撐油缸,支撐油缸伸張,將車輛頂起至合適的離地高度后,中央處理器控制換向電磁閥至中位,支撐油缸停止運動,車輛完成舉升作業。
3.3.2 車輛旋轉
車輛完成舉升作業后開始進行旋轉調頭作業,進行順針旋轉作業時,中央處理器將電信號傳遞給液壓馬達油路的換向電磁閥,使換向電磁閥在左位,液壓馬達順時針旋轉。車輛進行逆時針旋轉作業時,中央處理器將電信號傳遞給換向電磁閥,使換向閥在右位,液壓馬達逆時針旋轉。車輛到達指定位置,停止旋轉時,中央處理器將電信號傳遞給換向電磁閥,使換向閥切換到中位,液壓馬達關閉,車輛停止旋轉。
3.3.3 狀態調整
車輛旋轉過程中,中央處理器根據車輛調頭前的前后傾斜角度,計算旋轉角度與車輛前后傾斜角度的關系,根據傾角傳感器的實時數據,將信號傳遞到控制調節油缸的換向電磁閥,通過換向電磁閥切換左、中、右3 個位置,調節支撐油缸的伸縮,改變車輛前后傾斜角,確保車輛在旋轉過程始終與地面平行。
3.3.4 車輛降落
車輛旋轉至指定角度后,中央處理器將調節油缸油路換向電磁閥和支撐油缸油路換向電磁閥切換至右位,液壓油分別通過換向電磁閥進入調節油缸油路和支撐油缸油路,支撐油缸首先開始收縮動作,車輛降落至地面,支撐油缸完成收縮后,調節油缸油路的順序閥打開,調節油缸收縮,到達指定位置時限位閥開啟,油路關閉,完成車輛原地調頭作業。
4 應用前景
該車載車輛原地調頭裝置采用電氣控制和液壓傳動的形式,解決了中重型車輛由于自身長度原因,難以在狹窄路面或復雜環境下調頭的問題。該裝置可廣泛應用于民用車輛的在狹窄路面調頭,應急救援車輛事故現場,軍用車輛在戰場復雜路面原地調頭。能夠實現民用車輛的降本增效,應急救援車輛快速開展救援作業。軍用車輛在戰場及時高效地完成作戰任務。
5 結束語
隨著我國經濟發展,重中型汽車發揮著越來越重要的作用,越來越多的新技術應用于中重型車輛,持續提升了中重型車輛的性能和功能,不斷解決車輛在實際應用中的難題,滿足當前中重型車輛發展的新需求。該車載車輛原地調頭裝置提供了一種新的車輛原地調頭方式,具有高效安全,操作簡單的特點,可有效提高車輛的機動性能,為駕駛人員在狹窄路面或復雜環境下可靠高效的完成任務打下了良好的基礎。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
