主動重心控制功能仿真建模與應用
2022-04-24 08:18:12楊俊張超王洋趙躍明吳佳駒
航空工程進展 2022年2期
楊俊,張超,王洋,趙躍明,吳佳駒
(航空工業(yè)第一飛機設計研究院飛控系統(tǒng)設計研究所,西安710089)
0 引言
飛機飛行過程中,其重心會隨著燃油的消耗、武器或貨物的投放而發(fā)生變化。而重心與飛機的飛行安全、穩(wěn)定性和性能密切相關。通常,通過設計合理的耗油順序和武器掛載與使用方案,可以“被動”地將重心控制在規(guī)定范圍內,但這種方式未能充分發(fā)揮飛機的性能。例如,超聲速飛行時,氣動焦點大幅后移,重心和焦點的距離增大,導致配平阻力增大,增加了燃油消耗。
正是基于上述考慮,國外在20 世紀70 年代率先提出了主動重心控制技術,該技術考慮燃油消耗、武器(貨物)投放的影響,根據(jù)相關控制需求,通過控制機上燃油在不同油箱之間的轉輸,實現(xiàn)對飛機重心的主動控制。雖然該技術先后在“協(xié)和”、Tu-144、B-1B、Tu-160、A330/340 和A380 等國外軍/民用飛機上得到應用,并在減小阻力、節(jié)省燃油消耗、解決重心控制難題等方面發(fā)揮了重要的作用,但是能夠獲取到的資料很少,主要集中在相關原理和架構等方面,未涉及有關建模方法的介紹。
國內在該領域的研究起步較晚,尚未實現(xiàn)工程化應用,還處于理論研究階段。張晶等對功能的方案和設計方法進行了研究,提出了最佳重心位置設計準則,建立了基于平衡輸油系統(tǒng)的重心位移模型,并進行了仿真驗證;Li Haiquan等分析了燃油泵和轉輸管路故障對功能的影響,提出相關緊急處置策略;Yan Jianing 等基于滑模控制對功能的控制律進行了研究,表明滑模控制能提高對重心指令的跟蹤速度和控制精度;楊俊等對目標重心位置開展研究,提出了目標重心位置的確定原則,并對重心控制策略進行了分析,指出通過合理設計燃油轉輸門限,能在減小阻力、節(jié)省燃油消耗與減輕燃油系統(tǒng)/設備工作負擔之間取得平衡。相關研究工作聚焦于功能的方案和原理設計,而對仿真建模的介紹較為粗略,未能體現(xiàn)建模的方法和難點。
減小飛行阻力、節(jié)省燃油消耗是主動重心控制功能的重要收益,對方案論證、迭代和優(yōu)化設計有著重要的影響。國外多型具備主動重心控制功能的飛機都在其尾翼設置了配平油箱,通過機翼油箱和配平油箱之間的燃油轉輸實現(xiàn)飛機重心的主動控制。但是,該方案增加了燃油系統(tǒng)的硬件成本,而且當機翼油箱和尾翼配平油箱之間的燃油轉輸發(fā)生故障,燃油無法向機翼油箱轉輸時,隨著機翼油箱燃油不斷消耗,很可能導致飛機重心超出安全后限,危及飛行安全。
因此,從經(jīng)濟性和安全性角度出發(fā),某型飛機初步考慮僅通過機翼油箱之間的燃油轉輸實現(xiàn)主動重心控制功能。但是,由于機翼油箱組縱向重心的差異較小,采用該方案是否能滿足設計要求、發(fā)揮功能的性能,需要盡快明確,以支撐功能的研制。本文針對該型飛機的需求,基于功能的原理和方案,闡述主動重心控制功能的建模思想和方法,對功能初步方案的減阻和省油性能進行評估,以支撐方案的優(yōu)化設計。
1 主動重心控制功能方案
飛機通常有多個分布在不同位置的油箱,這些油箱的縱向重心位置是不同的,通過油箱之間的燃油轉輸,可以對飛機縱向重心進行控制,這是主動重心控制功能實現(xiàn)的物理基礎。
某型飛機主動重心控制功能由飛控系統(tǒng)和燃油系統(tǒng)協(xié)同實現(xiàn)。飛控系統(tǒng)負責解算飛機的實時重心,并根據(jù)飛機的目標重心輸入解算出燃油目標重心,發(fā)送給燃油系統(tǒng)。燃油系統(tǒng)根據(jù)燃油目標重心解算出相關泵和閥的控制指令,通過控制泵和閥的開啟或關閉,控制燃油在油箱之間的轉輸,從而將飛機的重心維持在期望的位置上,以減小飛行阻力,節(jié)省燃油消耗,提升飛機性能。
同時,燃油系統(tǒng)還需解算燃油的重量和重心,并將其發(fā)送給飛控系統(tǒng),以供飛控系統(tǒng)解算全機重量和重心使用。
2 主動重心控制功能建模
2.1 模型架構與仿真流程
主動重心控制功能模型架構如圖1 所示,包括仿真設置與控制、飛控系統(tǒng)、自動飛控、氣動力、發(fā)動機、燃油系統(tǒng)和飛機六自由度模型七個子模塊。
仿真控制模塊是仿真設置和控制指令的輸入接口,也是飛機姿態(tài)角、過載、角速率和燃油重量和重心等參數(shù)的反饋中繼。自動飛控模型根據(jù)高度和保持指令,解算出控制指令發(fā)送給飛控系統(tǒng)和發(fā)動機模型,控制飛機按照期望的軌跡飛行。氣動力和發(fā)動機模型,根據(jù)相關輸入,解算出飛機當前的氣動力和力矩、推力和耗油率,供六自由度模型和燃油系統(tǒng)模型使用。燃油系統(tǒng)模型根據(jù)飛控系統(tǒng)指令控制燃油轉輸,并解算出燃油的質量特性數(shù)據(jù),供飛控系統(tǒng)模型和六自由度模型使用。六自由度模型根據(jù)氣動力和力矩、推力和飛機實時重量和重心以及燃油質量特性數(shù)據(jù)解算出飛機的姿態(tài)和飛行參數(shù)并反饋給各有關模塊。

圖1 模型架構Fig.1 Framework of model
2.2 飛控系統(tǒng)建模
飛控系統(tǒng)模型應具備如下功能:(1)三軸控制功能,根據(jù)自動飛控系統(tǒng)發(fā)送的指令,實現(xiàn)對飛機三軸運動的控制;(2)飛機實時重心解算;(3)燃油目標重心解算。
三軸控制功能是飛控系統(tǒng)常規(guī)功能,相關技術已經(jīng)很成熟,在此不再贅述。而飛機實時重心的計算則采用基于重量分布的方法,依據(jù)飛機的重量組成(空機重量、貨物重量和燃油重量),先設法得到各組成部分的重量和重心,然后通過式(1)加權計算,得到整機的重心位置。

式中:、和分別為飛機的重心在重心計算坐標系、、軸上的坐標;x、y和z分別為各組成部分的重心在、、軸上的坐標;w為第個組成部分的重量。
對于燃油目標重心,則根據(jù)飛機目標重心、空機重量和重心、燃油重量以及貨物重量和重心進行解算,相關算法如下:

式中:、、、分別為燃油目標重心、飛機目標重心、貨物重心和空機重心;∑、、、分別為飛機總重、貨物重量、空機重量和燃油重量。
2.3 自動飛控系統(tǒng)建模
自動飛控系統(tǒng)應實現(xiàn)高度保持和保持功能,能根據(jù)相關輸入解算出控制指令并發(fā)送至飛控系統(tǒng)和發(fā)動機模型,實現(xiàn)對飛機飛行軌跡的控制。有關建模方法和技術已經(jīng)很成熟,在此不再贅述。
2.4 燃油系統(tǒng)建模
2.4.1 燃油轉輸控制原理
某型飛機的油箱全部位于機翼,單側機翼的油箱分為內外兩個油箱組,每個油箱組又包含多個油箱。燃油重心轉輸系統(tǒng)獨立于發(fā)動機供油系統(tǒng),重心轉輸不影響發(fā)動機的正常供油。目前方案是通過內外兩個油箱組之間進行燃油轉輸,實現(xiàn)對飛機縱向重心的控制。
當需要向前調節(jié)重心時,將兩側機翼外油箱組的燃油向內油箱組轉輸;反之,需要向后調節(jié)重心時,將內油箱組的燃油向外油箱組轉輸。
2.4.2 燃油轉輸控制律
燃油轉輸控制律采用比例控制器,被控量為燃油重心位置,控制變量為燃油轉輸流量。假設期望的燃油縱向重心為ˉ,實際的燃油重心為ˉ,采用反饋控制,控制律框圖如圖2 所示。
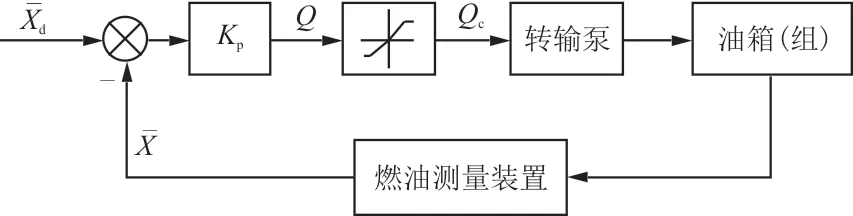
圖2 比例控制器Fig.2 Proportional controller
控制律為

考慮到燃油轉輸?shù)淖畲罅髁肯拗疲瑢θ加土髁窟M行限幅處理:

2.4.3 燃油質量特性模型
燃油系統(tǒng)模型還需計算自身的質量特性數(shù)據(jù)以供飛控系統(tǒng)模型解算全機實時重心,以及六自由度模型解算飛機的運動參數(shù)。
燃油質量特性數(shù)據(jù)包括燃油重心和燃油轉動慣量兩部分。飛機的油箱通常都是不規(guī)則的幾何體,當油箱內存儲不同質量的燃油時,其重心和慣量是不同的;另外,由于燃油易流動的屬性,當飛機發(fā)生俯仰和滾轉操作時,即使對于同一個油箱、相同油量條件下,相比未發(fā)生俯仰和滾轉操作的情況,其重心和慣量也是不同的。因此,如果忽略過載的影響,燃油質量特性數(shù)據(jù)可以表征為飛機俯仰角、滾轉角和燃油重量的函數(shù)。
實際中,常借助CATIA 等三維建模軟件,結合其二次開發(fā)功能,采用切片法獲取燃油質量特性數(shù)據(jù),主要步驟為:
(1)建立油箱三維模型;
(2)確定典型的姿態(tài)角,即確定俯仰角和滾轉角的組合;
(3)針對某一特定姿態(tài)角(俯仰角和滾轉角組合),從油箱底部開始,以平行于油面(油面由俯仰角和滾轉角決定)的切割面,按照一定的步長去切割油箱模型,每次切片保留剩余燃油部分,利用CATIA 的測量功能得到其重心和慣量,從而得到每個油箱燃油重心和慣量與其重量的關系;
(4)基于上述得到的數(shù)據(jù),構建燃油質量特性數(shù)據(jù)庫,通過查表法插值得到特定重量、俯仰角和滾轉角下燃油的重心和慣量。
如果飛機僅在縱向平面內運動,則可以忽略滾轉角對燃油質量特性的影響,且能降低建模的復雜度。本文的仿真只需飛機在縱向平面內運動,因此,可以簡化燃油質量特性數(shù)據(jù)的建模,即將重心和慣量表征為燃油重量和俯仰角的函數(shù),建立的燃油質量特性模型(以某一油箱為例)如圖3 所示。
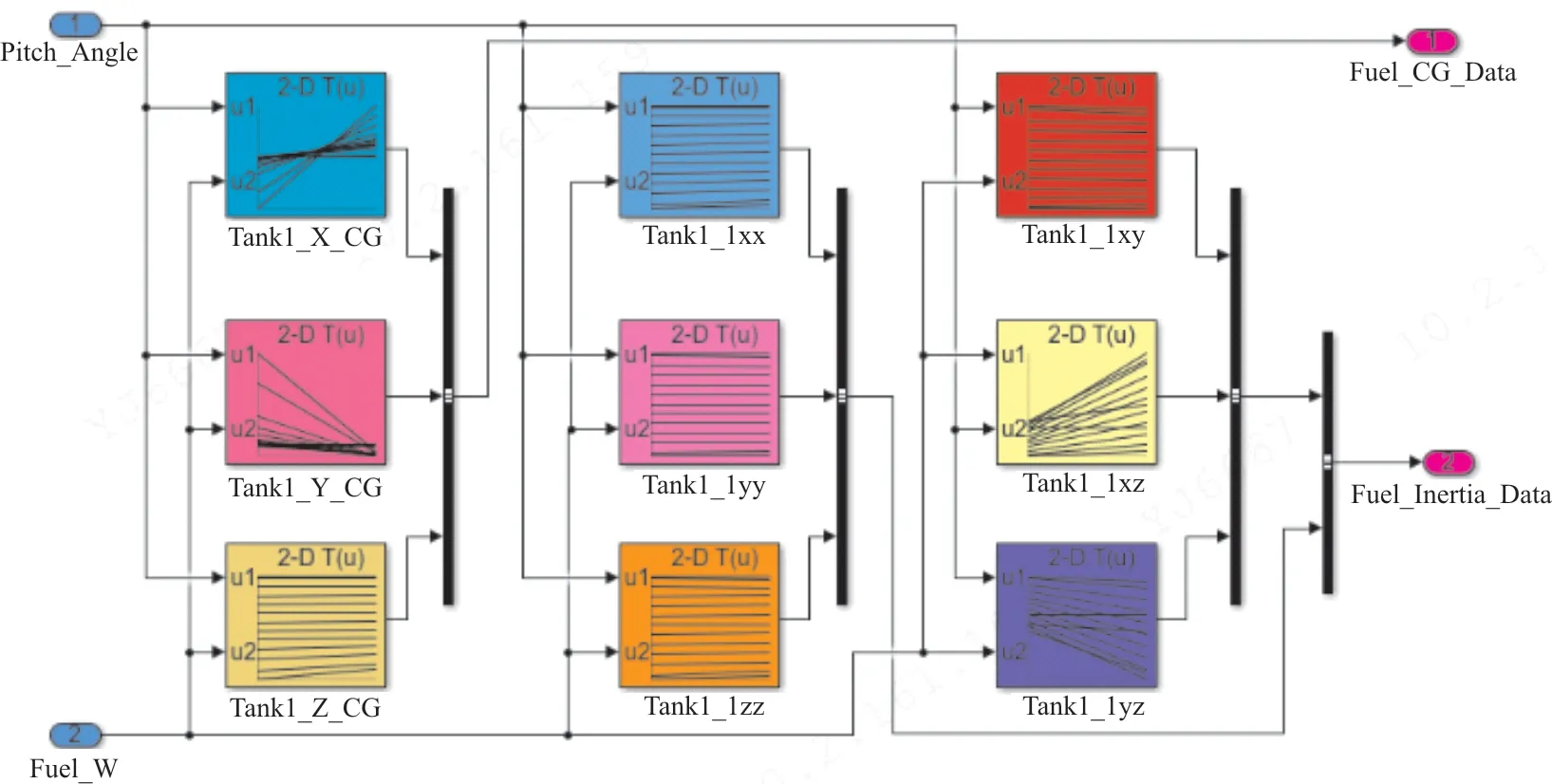
圖3 燃油質量特性模型Fig.3 Model of fuel mass properties
2.4.4 燃油系統(tǒng)模型
建立的燃油系統(tǒng)模型如圖4 所示,主要包括燃油轉輸控制模塊(Fuel_Transfer_Control)、油箱剩余燃油計算模塊(Residual_Fuel_Computation)、燃油慣量計算模塊(Fuel_Inertia_Computation)和燃油重心計算模塊(Fuel_CG_Computation)。

圖4 燃油系統(tǒng)模型Fig.4 Model of fuel system
轉輸控制模塊根據(jù)燃油目標重心指令(Fu?el_CMD)和發(fā)動機耗油率解算各油箱的進/出流量,剩余燃油計算模塊對進/出流量積分得到各油箱剩余燃油,燃油慣量和重心模塊根據(jù)油箱剩余燃油和飛機姿態(tài)角(AC_Attitude)解算出燃油的自身慣量和重心數(shù)據(jù)。
2.5 氣動力建模
氣動力在風軸系的三個分量、、和氣動力矩在體軸系的三個分量、、,可以近似表征為馬赫數(shù)()、迎角()、側滑角()、副翼偏轉角度()、升降舵偏轉角()和方向舵偏轉角度()的函數(shù),利用風洞數(shù)據(jù),即可建立氣動力和力矩模型,供解算飛機運動方程使用。
2.6 發(fā)動機模型
發(fā)動機模型應根據(jù)自動飛控的指令解算出所需的推力和發(fā)動機耗油率,耗油率作為油箱剩余油量解算的關鍵輸入,用于燃油轉輸控制和燃油實時重量、重心和慣量的解算。
根據(jù)發(fā)動機性能數(shù)據(jù),發(fā)動機的耗油率與推力、馬赫數(shù)和高度緊密相關。建立的發(fā)動機模型如圖5 所示,該模型根據(jù)自動飛控指令、飛行高度和解算出發(fā)動機的推力和實時耗油率。
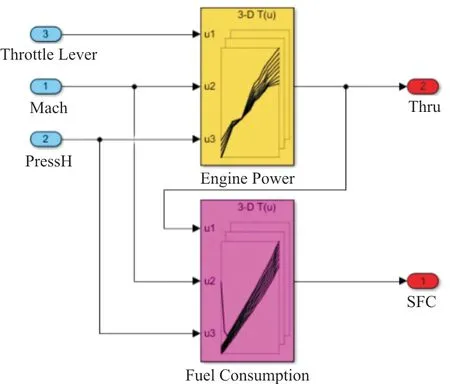
圖5 發(fā)動機模型Fig.5 Engine model
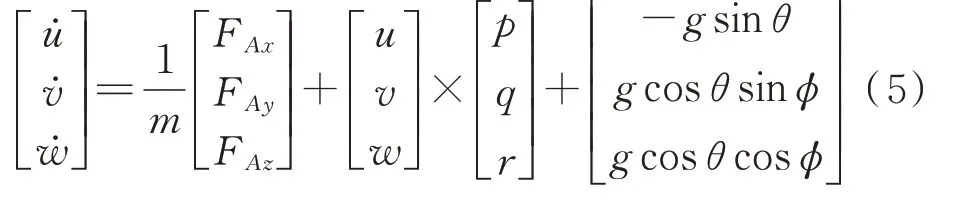
2.7 飛機6-DOF 建模
對于體軸系原點位于重心的飛機六自由度模型,其力方程組可以表示為
力矩方程組可表示為

式中:、、為飛機速度矢量在體軸系中的分量;F、F、F為非重力合力(包括氣動力和推力)在體軸系中的分量;、、為體軸系三軸角速率;、為俯仰角和滾轉角;、、為體軸系下三軸力矩分量;為飛機轉動慣量。
上述模型以重心作為坐標原點,而氣動力矩和推力力矩的參考點通常不與重心重合,而且隨著燃油的消耗,重心位置發(fā)生改變,體軸系也會跟著移動。因此,需要對由于重心改變導致的力矩變化進行修正,再將修正后的力矩帶入六自由度模型進行解算。另外,燃油的消耗也會引起全機慣量的變化,因此同樣需要對慣量進行修正。
2.7.1 力矩修正
為重心計算坐標系,其原點通常位于機頭,軸平行于飛機縱軸指向機尾,軸垂直于飛機對稱面指向右側,軸由右手準則確定,指向上方,如圖6 所示。為體 軸系,軸平行于飛機縱軸指向機頭,軸垂直于飛機對稱面指向右側,由右手定則確定。氣動力和推力相對于力矩參考點產(chǎn)生的力矩為,則根據(jù)理論力學知識,其相對于重心產(chǎn)生的力矩如式(7)所示。

圖6 力矩修正示意圖Fig.6 Schematic of moment correction
=+Δ=+∑F×=
+∑F×(-) (7)
式中:∑F為重心計算坐標系下描述的非重力合外力;、、為重心計算坐標系下描述的徑矢。
為了表示方便,將式(7)改寫成體軸系下的表達形式
=+F×(-) (8)
式中:F為在體軸系下描述的非重力外力。

式中:,,,,α分別為阻力、推力、升力、側力和發(fā)動機安裝角;為從重心計算坐標系到體軸系的轉換矩陣。



而-在重心計算坐標系下可表示為
則,修正后的力矩在體軸下可表示為

2.7.2 慣量修正
根據(jù)飛機的重量組成,可以由式(13)計算出全機的轉動慣量。

式中:I,I,I,I,I,I為飛機的自身轉動慣量;∑I,∑I,∑I,∑I,∑I,∑I為空 機、貨物 和燃 油的 自身 轉動 慣量;∑ΔI,∑ΔI,∑ΔI,∑ΔI,∑ΔI,∑ΔI為空 機、貨物和燃油的移軸轉動慣量。
移軸轉動慣量可根據(jù)公式(14)計算:

式中:W為飛機各組成部分重量;x,y,z為各 組成部 分的 重心 分量;,,為全 機實 時重 心分量。
2.7.3 6-DOF 模型
建立的飛機六自由度模型如圖7 所示,包括力矩修正模塊(Moments Correction)、慣量修正模塊(Inertia Correction)和運動方程模塊(6-DOF Mo?tion Equation)。力矩和慣量修正模塊輸出修正后的氣動力矩和推力力矩及全機慣量,運動方程模塊根據(jù)力和力矩等輸入解算出飛機的速度、角速率和姿態(tài)角等飛行參數(shù)。

圖7 飛機六自由度模型Fig.7 6-DOF model
3 仿真分析
3.1 仿真設置
基于建立的模型,設置飛行高度=10 km,分別為0.7、0.8,在其他條件相同的情況下,針對不同的目標重心(0.28~0.33)和不進行重心控制的情況,仿真飛行5 h。以不進行重心控制飛機的燃油消耗為基準,對比分析不同目標重心控制情況下飛機的燃油消耗情況,以對主動重心控制功能初步方案進行評估。
3.2 仿真結果
功能的減阻收益,即在同樣的飛行高度和速度下,飛行同樣的時間,進行重心控制后相比不進行重心控制,飛機節(jié)省的燃油消耗量。
因此,將進行重心控制的飛機耗油量與不進行重心控制的飛機耗油量相減,可得主動重心控制功能的收益。功能收益與目標重心的關系曲線如圖8 所示,圖中兩條曲線分別對應=0.7 和=0.8 情況下,不同目標重心位置對應的節(jié)省的燃油消耗。可以看出:(1)相同條件下,越大,功能的收益越大;(2)目標重心越靠后,功能的收益越大,能帶來超過850 kg 的燃油收益;(3)隨著目標重心向后變化,對功能收益的影響逐漸減弱。

圖8 功能減阻收益Fig.8 Benefits of drag-reduction
3.3 結果分析
針對上述提及的對收益影響減弱的情況,進一步考察飛機重心隨時間變化的情況。飛機重心變化曲線如圖9 所示,(a)和(b)分別對應=0.7 和=0.8 條件下,不同目標重心(仿真開始后500 s 啟動主動重心控制)和不進行重心控制情況下飛機的實時重心隨時間變化的曲線。

圖9 飛機重心變化曲線Fig.9 Curves of CG Variation
從圖9 可以看出:目標重心越靠后,仿真過程中能將飛機的重心維持在目標位置的時間越小。這主要是油箱布置的限制導致的,進行重心轉輸?shù)挠拖渚挥跈C翼上,其在縱向的有效重心差值較小,飛機改變和維持相同的重心所需要的燃油量更大。而隨著飛行時間的增加,發(fā)動機不斷消耗燃油,機上可供轉輸?shù)娜加椭饾u減少,以致最后無法將飛機重心維持在期望的位置。
通過對仿真結果的分析,可以得到如下結論:
(1)目標重心越靠后,收益越大,越能節(jié)省燃油;
(2)受限于飛機的油箱布置,目標重心越靠后,將飛機重心維持在目標位置的時間越少;
(3)能影響功能的收益,但是其效果受限于油箱布置,未能充分體現(xiàn)出來。
總的來說,應用主動重心控制技術,能減小飛行阻力,節(jié)省燃油消耗。但是,由于油箱布置的限制,不能在整個仿真時間內始終將重心維持在目標位置,未能充分發(fā)揮主動重心控制功能的潛力。
4 結論
(1)應用主動重心控制技術,能減小飛行阻力,節(jié)省燃油消耗,帶來較為可觀的收益。
(2)目標重心位置越靠后,應用主動重心控制技術后,節(jié)省的燃油消耗越大,收益越明顯。
(3)對功能的收益有影響,越大,收益越大。
(4)受限于油箱布置,當前的方案未能充分發(fā)揮主動重心控制技術的潛力,下一步有必要對功能方案進行優(yōu)化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
中國科技論壇(2017年7期)2017-07-25 08:49:53
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
