基于Arc GIS的動態復雜空域臨時航跡人工智能規劃的研究
2022-04-22 11:19:38趙鶴逸付茂洺
現代計算機 2022年3期
趙鶴逸,付茂洺
(中國民用航空飛行學院,廣漢 618307)
0 引言
我國可用的空域資源及提升空間均非常有限。我國民航可用的空域主要由航路、航線、終端管制空域以及一些臨時調配空域組成,除此之外均為軍方控制或其他用途。目前我國空域民航使用范圍只有約20%,其余80%為軍用或者處于控制范圍,一般情況下民航飛機不得進入軍用或處于控制范圍內的空域。我國航路里程的復合增速僅3.4%,而航班起降架次增速達9.9%,在空域資源放開推進十分緩慢。另一方面,全球民航客運市場在快速發展導致民航飛機數量快速增加。圖1是全球民航客運市場增速曲線和全球經濟增長曲線對比圖。從圖1中可以看出全球民航客運市場的增長速度始終保持在全球經濟增長速度兩倍左右。2016—2018年,民航客運市場依然保持了較高速增長,整體RPK同比增速高于全球綜合PMI指數。這說明民航客運市場需求增速領先于經濟增長。所以在可以預計的未來經濟會繼續保持增長。民航產業會在經濟的增長前保持高速增長,所以民航飛機數量會快速增加,民航飛機可用的航線資源相對而言會越來越少。由此看來,充分提高規劃管理臨時航線數量和管理臨時航線效率是解決民航航線資源和民航飛機數量快速增長矛盾的唯一辦法。

圖1 民航增速曲線
為了提高有限空域的利用效率以應對快速發展的民航運輸業,需要采用更好的方法管理民航飛機臨時飛行航線。這就是本文所研究的問題,其已經成為民航飛機飛行管理過程中必須要解決的難題。要解決這個難題,必須采用下技術:①實時準確跟蹤空域內民航飛機飛行參數。②分段規劃民航飛機的臨時飛行航線。③采用多層智能規劃算法提高規劃民航飛機臨時航線的效率。④優化規劃民航飛機臨時航線的算法;本文通過分段規劃民航飛機臨時航線的方法和多層人工智能技術解決以上問題。
1 國外規劃臨時航線算法
國外在規劃民航飛機臨時航線方面研究多年積累了豐富經驗。提出了多種算法,如動態規劃法、Voronoi圖法、A*算法、粒子群算法、遺傳算法、狼群算法、神經網絡算法、人工勢場法。這些算法由于功能單一在規劃空域民航飛機臨時航線時有一定作用,但是不能解決大量實時動態規劃四維空間中民航飛機臨時飛行航線。而實時動態分段計算臨時航線的生命周期可以充分利用空域資源。避免啟用和終止臨時航線的過程中占用臨時航線的整個空域。
1.1 建立仿真平臺
由于需要考慮動態實時分段規劃臨時航線所以需要跟蹤民航飛機的飛行速度、飛行高度、空域天氣參數。常用的飛行路線規劃軟件無法滿足要求。所以采用SXEarth_Pro 4.7.0通過谷歌影像獲取所需區域的實時影像。如圖2所示是SXEarth_Pro 4.7.0模擬的指定空域實時影像。

圖2 指定空域實時影像
考慮到數據大小和清晰度的前提下進行截取獲取影像數據,下載ASTER GDEM v3獲取相應經緯度的固定區域的高程數據,然后通過ArcScene軟件將該區域的影像數據與高程數據進行結合,實現所需地域的3D場景可視化。
1.2 A*神經網絡
由于實時動態分段規劃民航飛機臨時航線的算法需要同時跟蹤10~500架飛機飛行航線參數,以及飛機飛行空域天氣參數。普通的A*算法已經快速不能完成計算任務。所以采用模擬人工智能的三層神經網絡算法結合A*算法完成實時跟蹤民航飛機飛行航線任務和跟蹤空域天氣參數任務以及實時動態分段規劃臨時焊線任務。如圖3所示,整個神經網絡采用三層結構。輸入層是跟蹤空域天氣參數和已知民航飛機飛行航線參數以及需要臨時進入空域的民航飛機的起點和重點以及實時位置參數。輸出層是根據SXEarth_Pro 4.7.0獲取的該空域高程、風力等參數信息利用A*計算模型計算可以使用臨時航線航線。A*神經網絡的隱藏層有多個。每一個隱藏層的數據結構記錄一架跟蹤的民航客機的實時 坐標 以及 飛行 速度{ID,x,y,h,v}。如圖4所示,神經網絡模擬曲線和實際參數曲線接近。可以看出神經網絡模擬結果的誤差較小。A*神經網絡計算出結果與實際數據對比很接近。
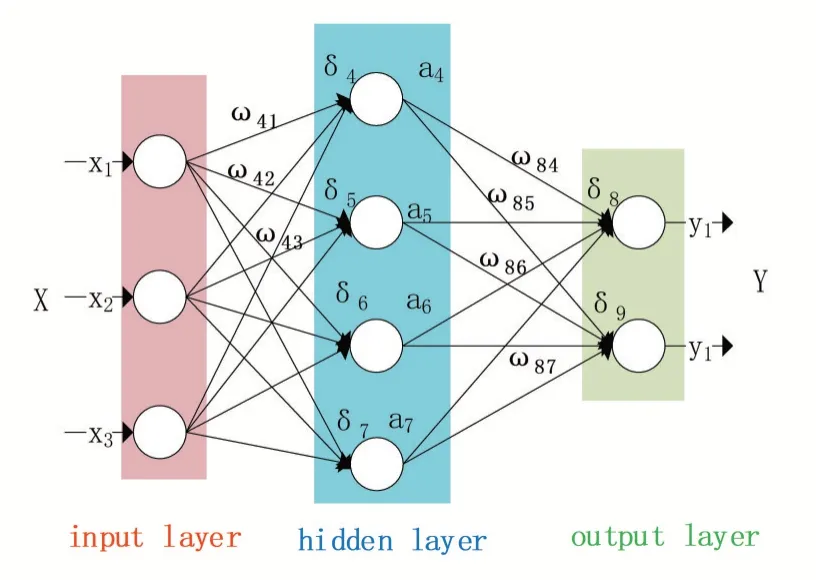
圖3 神經網絡結構
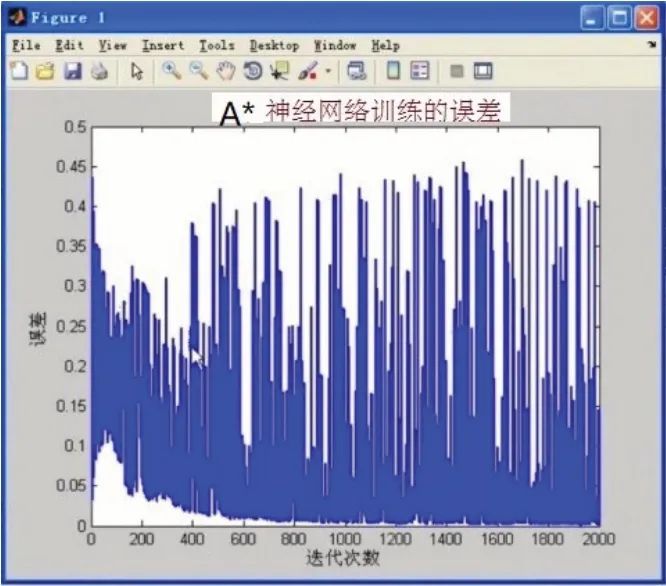
圖4 神經網絡訓練誤差
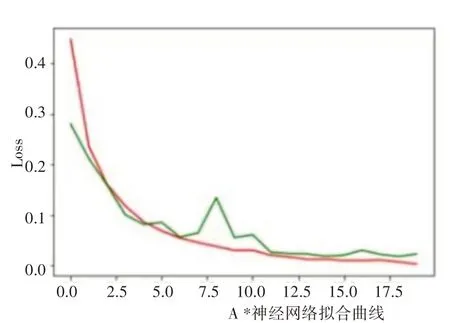
圖5 神經網絡擬合曲線
2 A*神經網絡算法規劃臨時航線的改進
2.1 增加臨時分段航線的生命周期
民航飛機飛行過程是一個動態實時變化的過程。上文規劃民航飛機臨時航線僅僅跟蹤記錄民航飛機的實時位置。民航飛機使用的航線依然是靜態的。在民航飛機使用航線空域過程中,別的飛機是不能利用這段空域的。而這一點就是浪費空域資源的根本原因。所以需要分段跟蹤記錄民航飛機的飛行航線{(),(),(),(),(),()}。()是A*神經網絡隱藏層記錄民航客機飛行航線數據結構的代號。(),(),()表示民航客機在時間()內的三維坐標。數據結構()在時間()內是有效的。在時間())內,(),(),()表示的這段航線是被占用的。在時間()以外,(),(),()表示的這段航線是可以使用的。分段計算臨時航線后要檢測臨時航線與已有航線重疊的情況以及臨時進入空域民航飛機與固定航線飛機的距離。計算臨時進入空域飛機與其他飛機航線的距離,A*神經網絡程序會實時計算空域內每一架飛機與其它航線飛機在時間()內與其它飛機航線之間的距離。通過公式(1)計算空域內每一架飛機與其它航線飛機在時間()內與其它飛機航線之間平均的距離
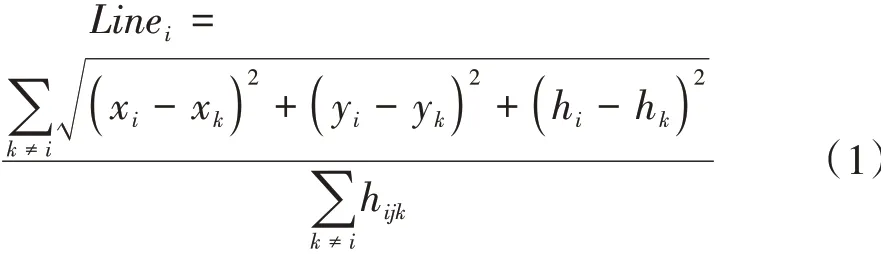
如圖6所示,平均距離的計算過程,1為固定航線飛機坐標點,3是已有臨時航線飛機坐標點。為正在規劃臨時航線飛機的坐標點。由此可以看出,1、2、3之間最小的距離分別為2 km與6 km。相關的距離為40 km以及100 km,為此可以計算得到1的平均每跳距離為17.50 km,同理得到到2、3的平均距離為16.42 km以及15.9 km。然后飛行分段臨時航線的民航飛機數據結構向飛行航線管理程序發送平均距離的數據。就可以避免臨時分段航線出現重疊的情況。
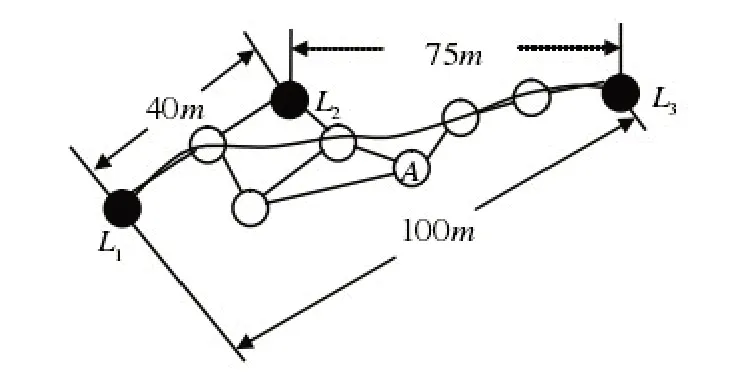
圖6 平均距離估計示意圖
在指定空域內臨時分段航線數量巨大的時候,會出現規劃的臨時分段航線冗余或不足的情況。從而導致A*神經網絡計算出現延時。在分段臨時航線有效而使用這段航線的民航客機沒有使用這一段臨時航線的時候。()是無效的,但是飛行航線{(),(),(),(),(),()}是有效的。飛行航線{(i-k),(),(),(),(),()}參數記錄在預選飛行航線數據庫中。從而降低A*神經網絡的計算量,減少A*神經網絡出現計算延時的情況。
2.2 增加A*神經網絡拓撲結構優化處理
由于A*神經網絡在不考慮天氣因素和高程的時候,民航飛機飛行航線規劃各個方向是可行的。如圖7(a)所示臨時分段航線是有很多選擇的。
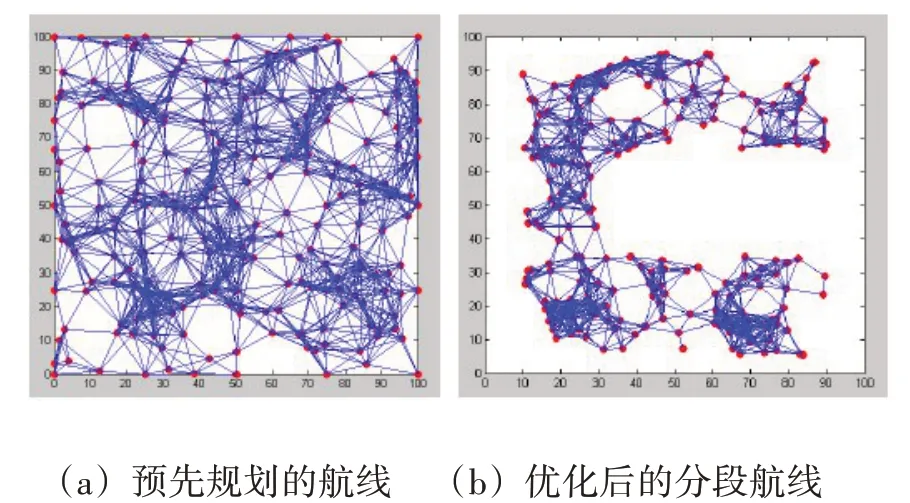
圖7 兩種臨時分段航線拓撲結構
需要利用A*神經網絡輸入層的陸地高程信息和天氣信息以及在()時刻已經使用的分段臨時航線參數進行篩選。得到圖(b)的優化臨時分段航線。考慮到利用人工智能篩選技術,在已經優化的分段臨時航線中篩選出最佳臨時分段航線可以大大提高臨時航線的合理性。
如圖8所示,在以上優化的臨時分段航線內,起點和終點之間的距離為55 km,分段臨時航線有4條,可以得到起點到終點平均每一段臨時航線距離是12.5 km;在考慮高程、天氣因素、已有分段臨時航線等因素的時候,起點和終點之間的距離還是55 km。但是臨時分段航線變成為10段。由此可以計算得到起點到終點方向上的平均每段距離變成5.5 km。但是總航程增加了。由此可以看出臨時航線2分段數增加數量也增加航程。
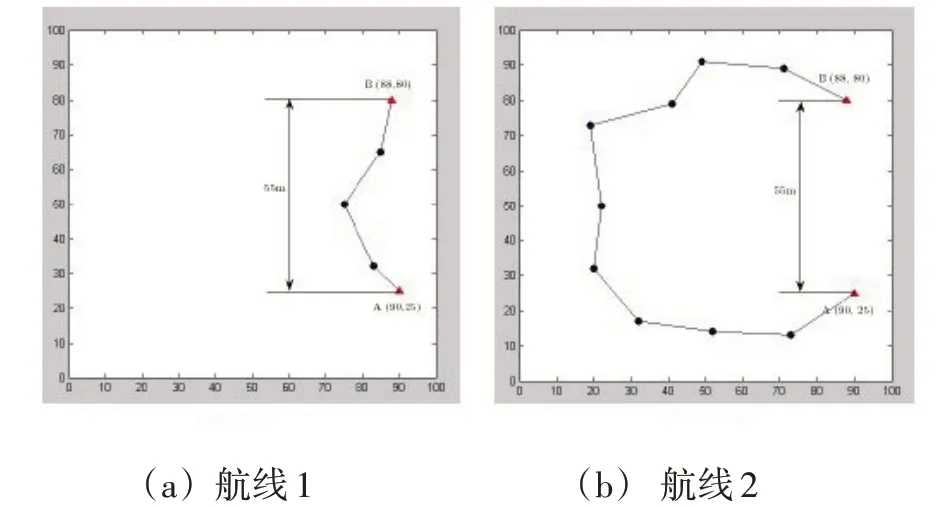
圖8 兩種分段臨時航線
為了避免增加臨時分段航線數量的同時增加總航程。在A*神經網絡算法基礎上,采用人工智能模型在A*神經網絡算法規劃出的分段臨時航線數據集中,從滿足油耗最少、路線最短、時間最短、路線最安全等條件出發篩選最優臨時分段航線。這個人工智能模型只在A*神經網絡算法計算結果中進行篩選。篩選后的結果也反饋到A*神經網絡計算的入口。從而降低A*神經網絡算法的計算量。提高A*神經網絡算法規劃分段臨時航線的速度。提高規劃的分段臨時航線合理性。避免出現民航客機飛完臨時航線后大大增加航程和油耗的問題。
3 預改進A*神經網絡算法的實現
通過上述的分析改進傳統的規劃臨時民航航空航線方法。改進之后采用A*神經網絡算法以及優化的A*神經網絡算法可以很好的計算規劃出分段臨時航空航線。然后結合人工智能算法篩選出合理的臨時航線。并把篩選結果反饋給A*神經網絡。可以減低A*神經網絡計算大量復雜臨時分段航線時可能出現的延時。為此本文給出的改進模式為:
首先利用A*神經網絡計算出可用的臨時分段航線拓撲網絡,然后利用Python采用人工智能技術從臨時分段航線拓撲網絡篩選出合理的臨時航線。
4 仿真實驗與分析
4.1 仿真目的
本文在SXEarth 4.7.0環境下仿真A*神經網絡規劃實時動態分段臨時航線算法。
4.2 仿真的環境
本文采用的SXEarth 4.7.0進行仿真,所有的數據都是采用Google地球實時數據。仿真實驗結果更加真實可靠。
4.3 仿真參數
本文仿真航線如圖9所示。

圖9 臨時航線模擬
本文主要用臨時航線航程比較判斷臨時航線規劃算法的性能,航程誤差為Er,第個分段航線的航程誤差為:

其中的EstiX 以及EstiY分別是未知分段臨時航線的估計橫、縱坐標,UX 以及UY為其分別是最優航程的橫縱坐標。所有的未知節點的平均航程誤差為,

其中為臨時分段航線的個數。
4.4 結果與分析
如圖10所示,采用A*神經網絡規劃臨時航線算法規劃臨時航線航程誤差是非常大的。對于改進之后的A*神經網絡規劃臨時航線算法航程誤差較均勻。同時因為采用Python人工智能篩選技術,規劃臨時航線的運算速度提高了。
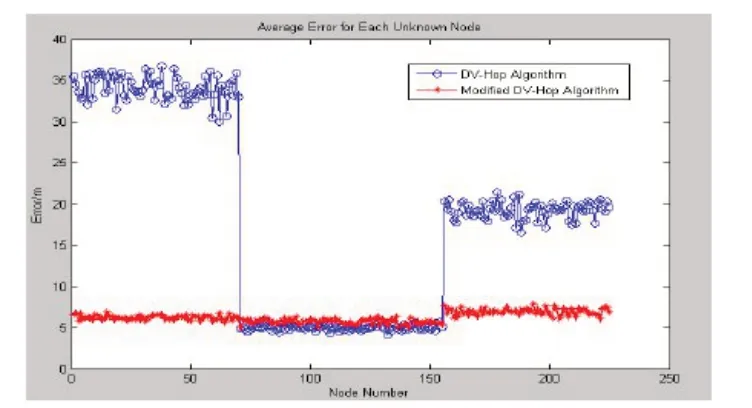
圖10 A*神經網絡算法和改進的A*神經網絡算法規劃臨時航線的航程誤差對比
5 結語
對于我國民航客機數量迅速增加,航空空域資源有限的情況,本文采用A*神經網絡優化規劃臨時航線的方法。在仿真分析結果的基礎上,采用規劃分段臨時航線的技術結合人工智能算法篩選合理的分段臨時航線。綜合考慮油耗、路線、時間、路線安全等因素篩選出更合理的臨時航線。達到合理規劃臨時航線提高空域利用效率的目的。解決我國民航客機數量迅速增加,航空空域資源有限限制航空業快速發展的矛盾。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
當代陜西(2019年11期)2019-06-24 03:40:28
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小康(2017年16期)2017-06-07 09:00:59
中國衛生(2016年2期)2016-11-12 13:22:16
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
