基于改進的HOG算法結合CNN-SVM的疲勞檢測
2022-04-22 11:20:58王爽
現代計算機 2022年3期
王 爽
(西安工程大學電子信息學院,西安 710600)
0引言
近年來,因疲勞駕駛導致的交通事故屢見不鮮,對個人的生命財產造成損失,也對國家道路的穩定性造成破壞。為了保障人民群眾的出行安全,針對駕駛員疲勞檢測的研究已經成為交通安全領域的研究重點方向。現有的相關研究中,主要有三種檢測疲勞的方法,分別是基于生理信號的疲勞檢測方法、基于行為特征的疲勞檢測方法、基于計算機視覺的疲勞檢測方法。
基于駕駛員的生理信號檢測主要是讓駕駛員在行車途中佩戴專業的檢測設備,通過分析正常狀態和疲勞狀態下的生理數據差異來進行疲勞判斷。這種方式影響駕駛的舒適度,而且成本相對昂貴,不利于實際應用推廣。
基于駕駛員行為特征的疲勞檢測方法一般是通過車輛行駛過程中的參數進行判斷,如車速、方向盤角度、加速狀態等,這種方法受限于行車車道、不同駕駛員行車的迥異度,以及路面狀況等,很難應用于復雜的實際場景中。
基于機計算機視覺的疲勞檢測方法根據駕駛員的眼睛、嘴部閉合程度頭部姿勢變化等疲勞特征進行判斷。通過攝像頭采集駕駛員的面部信息,結合數字圖像處理技術對關鍵部位進行識別并判斷疲勞狀態。深度學習技術的興起推動了計算機視覺領域的飛速發展,Geng L等提出了一種基于Haar特征的AdaBoost級聯分類算法,該算法首先對人臉進行檢測,然后利用卷積神經網絡識別眼部狀態并進行疲勞檢測。Dwivedi K等通過計算機視覺提取特征,利用構建的深度卷積神經網絡的方法對駕駛員的疲勞狀態進行判別。基于計算機視覺的方法具有非接觸、移植性強等優勢,但仍然存在很大的局限性。在實際駕駛過程中,光照的強弱變化及駕駛員姿態等因素都會影響設備獲取圖像的質量,導致對人臉的識別和關鍵點的定位會存在誤差,從而使得后續的眼部特征檢測的準確率受到影響。
綜合以上因素,本文提出一種改進HOG算法與CNN-SVM結合的人臉疲勞檢測方法。首先,改進了HOG特征提取的過程,傳統特征提取圖像的灰度梯度值只統計了垂直和水平像素,本文加入了對角線梯度信息,使得獲取的圖像邊緣信息更加豐富,從而提高人臉的檢測率。其次,使用級聯回歸實現面部特征點標定,對眼部圖片進行提取。接著使用CNN-SVM網絡進行眼部特征訓練。最后,結合PERCLOS等參數對疲勞狀態進行判別。通過實驗表明,本文提出的方法對駕駛員進行疲勞檢測有較高的準確率。
1 改進的HOG算法進行人臉檢測
1.1 HOG的特征提取
HOG是一種通過計算圖像灰度梯度值來提取特征信息的特征提取算法,具有速度較快,準確率較高等特點,被用于目標識別、人臉識別、表情識別等領域。本文使用HOG計算灰度圖像中的梯度特征來完成人臉檢測任務。
首先對輸入的圖片進行歸一化操作和Gamma校正處理,通過調節圖像對比度,使光照或陰影對圖片的影響降低,公式如下:

遍歷整個圖像,計算每個像素點在水平方向和垂直方向的梯度,對像素點(,)處的梯度值和梯度方向進行計算:

其中,G(,)、G(,)分別代表像素(,)水平方向的梯度和像素垂直方向的梯度。接著計算梯度幅值(,)和方向值(,)。
最后為每個cell構建梯度方向直方圖,把cell組合成大的block,對block內的直方圖進行歸一化,歸一化能夠對光照、陰影和邊緣進行壓縮。最后收集HOG特征,即把提取的HOG特征輸入到SVM分類器中供分類使用。
傳統的HOG算法在計算梯度方向的過程中,只是計算單個元素水平和垂直元素的灰度變化信息,導致圖像邊緣信息的丟失。本文對HOG算法進行改進,在原有的HOG信息上,加入了對角線像素的梯度方向和幅值信息,從而更好的提取人臉邊緣特征。最后連接原HOG向量及對角線元素計算得到的HOG特征向量,如圖1所示。
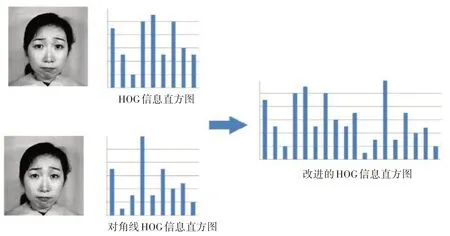
圖1 改進的HOG信息直方圖
計算改進的HOG的過程中,把像素的梯度方向和幅值定義如下:
可以看到HOG信息直方圖和對角線HOG信息直方圖信息有部分差別,因此將二者融合起來可以彌補很多丟失的圖像邊緣信息,提高后續人臉的檢測率。
1.2 人臉檢測
采用改進的HOG算法進行人臉檢測,檢測結果如表1所示,可以看出本文改進的算法相對于傳統HOG特征提取算法檢測人臉,取得了更好的效果。
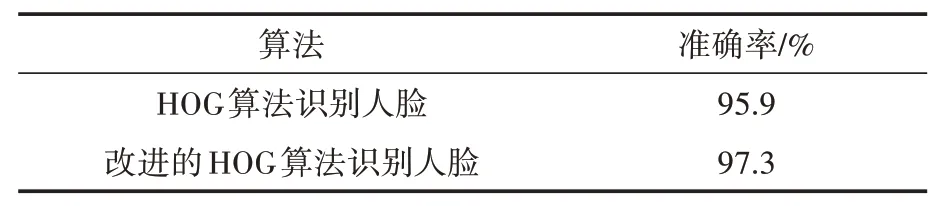
表1 兩種算法比較
2 人臉關鍵點定位
在人臉關鍵點檢測技術中,使用Kazemi等提出的回歸樹算法對人臉特征點定位。首先選取人臉的68個特殊標志點模型,包括對眉毛、眼睛、鼻子、嘴巴等特征點的標定。然后利用該算法提出的基于梯度增強的框架,通過優化損失函數和誤差的總和來學習回歸樹集合,檢測出臉部圖像中的68個關鍵點,并進行人臉對齊操作,分割局部區域。
3 CNN-SVM識別眼部狀態
3.1 CNN模型訓練
CNN常用于圖像領域,是一種帶有深度學習結構的前饋神經網絡,CNN的網絡結構包括卷積層、池化層和全連接層,CNN以二維圖像作為輸入并自動學習圖像特征,避免了對圖像進行復雜的預處理。本文對駕駛員眼部狀態的特征提取主要有兩種狀態模式:眼睛閉合和眼睛睜開,表2為基于CNN的駕駛員眼部狀態提取模型的網絡結構參數。
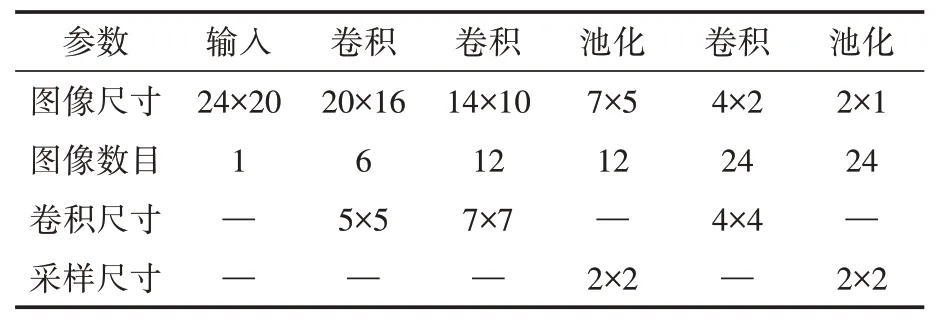
表2 駕駛員眼部狀態提取卷積神經網絡構
網絡結構采用三個卷積層、兩個池化層,最后加上兩個全連接層。在S2池化層和F1全連接層中加入L2正則化和Dropout技術,將棄權的概率設置為0.4。采用的優化算法是隨機梯度下降算法,加入損失函數,選擇的激活函數是ReLU函數。設置訓練的學習率為0.01,訓練的batches為64。經過200次的迭代過程,使誤差變動幅度保持穩定,模型基本達到訓練要求。
本文使用數據集主要有:CEW數據集以及自采數據集,自采數據包括5名男性和5名女性在正常光、稍暗光下眼睛睜開、閉合的圖像。為了在自采集數據集中達到增大訓練樣本的效果,同時也為了解決道路顛簸晃動帶來的圖像抖動等問題,對部分圖像進行反轉、角度旋轉。
選取7000張圖片作為本實驗的訓練集,正樣本為睜眼圖片,負樣本為閉眼圖片,分別為4000張和3000張,圖片尺寸歸一化處理為24×20。使用1000張測試樣本進行測試,測試結果如表3所示,在光照較亮的情況下,眼部狀態的睜眼準確率達到95.6%,閉眼準確率達到96.2%,平均識別識別率為95.9%。
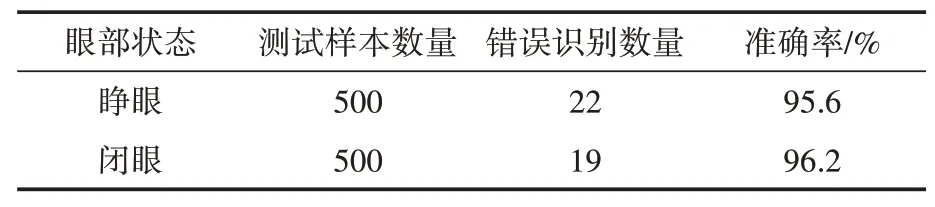
表3 模型訓練準確率
3.2 加入SVM分類器進行檢測
本文使用CNN作為特征提取器,當提取圖像的特征信息后對眼部狀態進行分類預測,但存在執行分類任務時計算量過大,且準確率還需提更高。針對此問題加入SVM當作特征分類器,即將CNN和SVM兩者結合并用于實現眼部狀態識別。
對比測試結果如表4所示,測試集同樣選取上面1000張測試樣本進行測試,可以看到使用單一CNN進行識別的平均準確率為95.9%,而加入了SVM的識別準確率為97.3%,實驗證實了該方法的準確性。
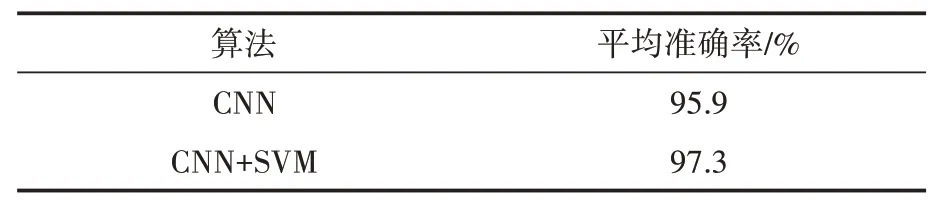
表4 CNN與CNN+SVM的識別率比較
4 疲勞參數
4.1 眨眼頻率參數
眼部從睜開到閉合再到睜開的一個完整過程認定為一次眨眼過程。眨眼頻率是指單位時間內眨眼的總次數。醫學上表明,人體正常清醒狀態下每分鐘眨眼次數在15~30次,每次眨眼持續時間為0.2~0.3 s。相比正常狀態,處于疲勞狀態時眨眼頻率會有所降低。
4.2 PERCLOS參數
PERCLOS是通過計算一段時間的眼睛閉和時間所占的比例進行疲勞判斷,PERCLOS的計算公式如下:
5 實驗結果與分析
5.1 實驗數據集
疲勞檢測的數據集使用YawDD數據集。YawDD是由Abtahi等制作的視頻數據集,通過車內攝像頭采集駕駛員模擬行車的圖像,該數據集包含不同性別、不同年齡的駕駛員在正常狀態和疲勞狀態下的視頻。
實驗的硬件采用Intel i5-9400F處理器,顯卡為GTX1650,內存使用16 G,實驗操作系統為Windows 10環境,基于Python 3.7語言的Ten?sorflow框架實現。
5.2 實驗結果
使用YawDD測試集分別截取5名測試者2分鐘模擬駕駛的視頻,為驗證模型準確率,實驗檢測并統計了測試樣本的眨眼次數和PERCLOS值,記錄結果如表5所示。
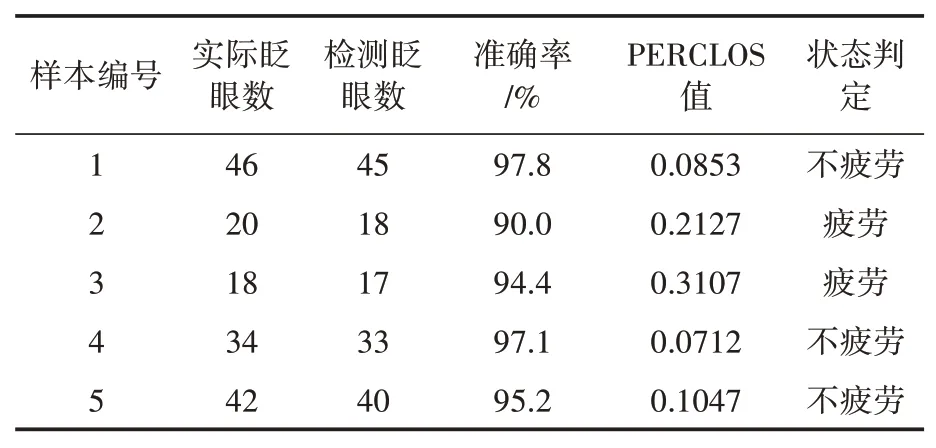
表5 疲勞駕駛檢測結果
根據上表可統計本次測試人員的PERCLOS值和眨眼次數的波動范圍,樣本越多,范圍越準,本次PERCLOS值的波動范圍在0.0712到0.3107之間。眨眼次數波動范圍在18~46之間。
可以看出,當駕駛人員在疲勞駕駛時,PERCLOS值有所增加,眨眼次數有所降低。在樣本2中,由于駕駛員處于較傍晚的環境下拍攝,并且駕駛員因個體原因產生了表情的變化,導致眼部疲勞特征的提取過程受到部分干擾,眨眼準確率有所降低。總體來看,本算法對眼部狀態識別準確率相對較高,平均準確率達到94.9%。
在狀態判定參數上,將PERCLOS閾值設置為0.18,總眨眼數的閾值設置為22,即當PERCLOS值大于0.17或眨眼次數小于22次判定為疲勞,實驗表明,疲勞狀態判定均未出現誤判的情況。
通過檢測結果可以看出,本文提出的基于改進的HOG算法與CNN-SVM的疲勞檢測方法對疲勞狀態檢測是十分有效的。
6 結語
本文以疲勞駕駛檢測為研究對象,提出了基于改進的HOG算法與CNN-SVM的人臉疲勞檢測方法,該方法首先對傳統HOG加以改進,加入對角線像素梯度信息,提升了圖像的邊緣信息,使檢測人臉準確率更高。然后使用特征點模型對人臉定位和分割。最后以CNN作為特征提取器,SVM作為分類器的網絡模型進行眼部狀態判別,并結合PERCLOS等參數進行疲勞駕駛檢測判斷。相較于其他疲勞檢測方法,本文方法不直接接觸駕駛員,移植性強,判斷準確度高,在交通安全領域擁有較好的前景。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26
