RNP離場程序航路點優化方法研究
2022-04-22 11:18:26任思潛張光明
現代計算機 2022年3期
任思潛,張光明
(中國民用航空飛行學院飛行技術學院,廣漢 618307)
0 引言
近年來,所需導航性能(required navigation performance,RNP)已經廣泛應用于我國越來越多的機場,特別是用于導航精度較高的機場。隨著我國民航運輸業高速發展,空中交通流量急劇增加,導致終端區有限空域資源與極速增長空中交通流量之間的矛盾不斷地加大,這不僅增大了航空公司運營成本,也造成了大量航班的延誤。因此,在滿足航空器安全運行的前提下,合理地規劃終端區空域以及優化RNP離場程序對于提高終端區運行效率、節省飛行時間和縮短飛行距離具有很大意義。
目前,有關終端區飛行程序設計與優化,國內外已經有不少學者專家對其進行相關研究,并都提出了相應可參考的優化方法,南京航空航天大學錢戈等,從飛行程序設計所要求的安全性、經濟性、簡便性及噪聲影響四個方面構建了多目標的飛行程序優化模型,并運用改進的多目標蟻群算法對其求解,實現對終端區空域合理科學地規劃。上海華東民航飛行程序設計研究院左凌等,對飛行程序設計的限制因素和設計要求兩方面進行著重分析,為飛行程序設計提供了一種技術方法。中國民用航空飛行學院黃邦菊等,通過運用三次樣條插值法對復雜地形機場仿真以及使用一種改進的A*算法對云南普洱機場4條離場程序分別進行設計研究,為復雜地形機場離場程序設計提供了一種方法。但是,關于針對航路點布局及航路點特征對儀表離場程序優化問題相關研究卻很少。嚴偉、王瑛等通過考慮幾種不確定因素對北京飛行情報區航路網絡建立多目標優化模型,并采用粒子群優化(PSO)算法對其求解,解決了航路網絡的運行成本與安全性之間沖突矛盾問題,實現了情報區航路網航路點布局優化,但未涉及到針對終端區IFP航路點布局的研究。
針對現有基于航路點的RNP離場程序優化研究較少的現狀,本文以某機場離場程序為例,以跑道末端上方15 ft位置為起始點,以離場結束位置為終點,在起始點和終點之間搜尋一條最優標稱航跡,將其作為該離場方向的最優飛行程序并與原有飛行程序做對比,研究航路點對飛行距離影響。具體研究思路為:首先給出了規劃區域障礙物評估原則以及航路點選取方法,在此基礎之上,根據規章規定相關限制要求構建終端區離場程序優化方法;再者,針對某機場離場程序提出了一種優化方案,并采用遺傳算法(Genetic Algorithm,GA)對其進行求解,最后通過實驗對比優化前后的飛行程序。
1 規劃區域障礙物評估原則
判定障礙物是否在保護區區域內是進行儀表離場程序優化的首要步驟,其中保護區區域分為多邊形區域與圓形區域。其次,在判定之后,還需對保護區內障礙物進行越障評估,并計算新的程序設計梯度(PDG)。
1.1 障礙物在多邊形區域
若保護區區域為多邊形形狀,則研究考慮使用射線法進行判定,其核心思想是以任意一個障礙物作為起點,朝著某一個水平方向作一條射線,計算該射線與多邊形的交點個數,如果為奇數則障礙物在多邊形區域內,反之,不在則表示在多邊形區域外。
1.2 障礙物在圓形區域
若障礙物區域為圓形形狀,則計算當前障礙物與該圓形區域中心的距離是否小于半徑。
保護區內障礙物評估分為直線保護區障礙物評估和轉彎保護區障礙物評估,障礙物評估方法如下。
1.2.1 直線保護區
假設該保護區內存在一障礙物,高米,位于中線右側米,且其投影在標稱航跡上距離跑道末端米。
判定障礙物是否穿透障礙物鑒別面(OIS)計算式如式(1)所示。

式(1)中,若計算得OIS值小于,則判定該障礙物未穿透,反之則穿透。如果穿透OIS面,則對該障礙物進行超障計算,方法如下。
最低超障高計算表達式如式(2)所示、

RH值計算如式(3)所示。

根據式(3)得到的RH值計算新的PDG值。如式(4)所示。式(4)中,為障礙物至跑道末端水平距離。

1.2.2 轉彎保護區
本文中,考慮的是在指定高度轉彎的情形。該情形下轉彎保護區內最小超障余度計算方法采用的是K-K線法。
不考慮H類直升機,規章規定,K-K線前障礙物最小超障高度應滿足表達式(5)。


K-K線后障礙物最小超障高度應滿足表達式(6)。

式(6)中,d 表示從DER至K-K線的水平距離;d 表示從轉彎起始區邊界至障礙物的最短距離。
根據式(5)和式(6)則得該轉彎保護區內允許的最小超障高如式(7)所示。

式(7)中,為指定高度處轉彎高;為最高的障礙物標高。
1.3 最短穩定距離航路點選取準則
傳統飛行程序由于受到障礙物及地形的限制,且其保護區范圍隨著航空器與導航臺間距離增加而增加,因此,相對于傳統飛行程序的航路點來說,PBN飛行程序中的航路點與其存在一定差異,即只要是處在信號的有效覆蓋區域內,就可自由靈活的設置航路點位置。
本文考慮采用最短穩定距離(MSD)來選取航路點,具體方法是以MSD為半徑,以當前位置為圓心確定圓周,在該圓周上選定一個點作為前方航路點并再將其作為圓心,依次類似選取前方航路點。
2 離場飛行程序優化方法
后續離場程序優化模型構建過程中,都必須滿足于以下假設條件。
(1)待優化飛行程序起始點與終點位置均已知。
(2)不考慮飛行限制區,只考慮保護區內越障要求。
(3)不考慮ATC管制特殊要求。
(4)不考慮H類直升機。
2.1 地理信息網格化
離場程序設計前,需對機場地圖數據進行預處理。以機場ARP點為中心將其120 km半徑區域進行網格化,將2度跨度近似地劃分為7202×7202網格,顯然網格精度間隔取6.73e-10 rad。
××機場(ARP點坐標:E109°42'19″,N27°26'38″)為例劃分,結果如圖1所示。
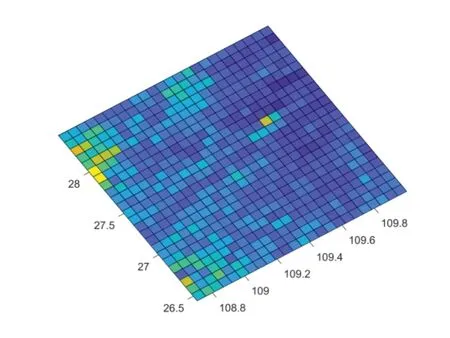
圖1 ××機場120km半徑區域
由于數字高程DEM的存儲和計算機矩陣的存儲是沿中線上下翻轉對稱,因此,在使用之前需預處理。如圖2所示是DEM數字地形存儲位與計算機存儲位關系。
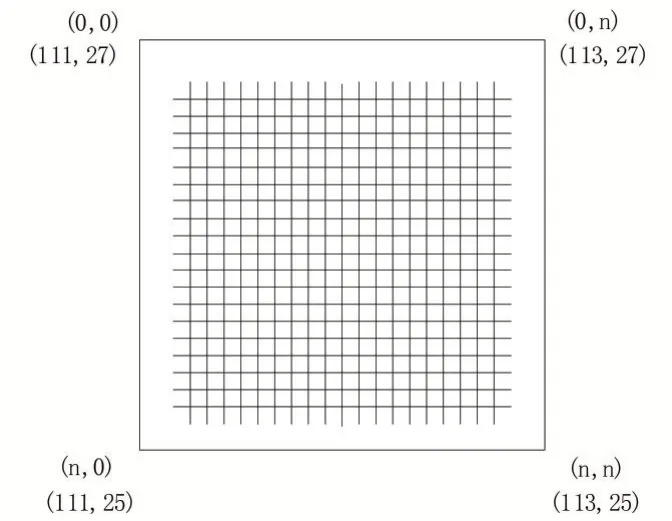
圖2 ××機場數字地形存儲方式
通過等距采樣625個點位置及高程信息形成25×25的采樣矩陣,并結合鄰近樣條插值法對某機場120范圍內三維地形進行還原,還原得到地形如圖3所示。
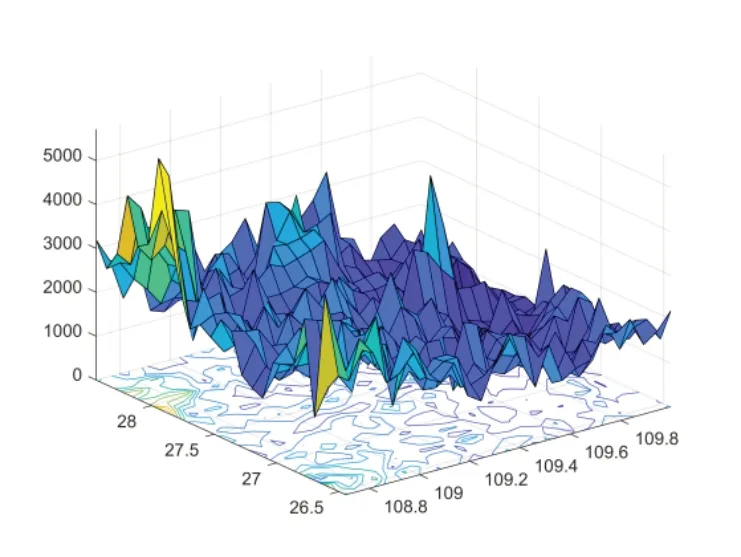
圖3 ××機場三維地形地貌圖
2.2 優化約束條件
根據航空器運行目視和儀表飛行程序設計規范及民用航空器性能限制要求,在構建離場程序優化數學模型時,需考慮航空器最低飛行高度、IFP航段保護區、最短航段距離、最大轉彎角度、最大轉彎離場角度及最大爬升梯度等約束條件。
2.2.1 最低飛行高度
在對離場程序進行設計或優化過程中,航空器需滿足規章所規定的最低飛行要求。即航空器最低飛行高度與障礙物高度差值必須大于最小超障余度,如式(8)所示。

式(8)中,表示航跡上任意一點所對應的飛行高度;表示障礙物實際高度;示航跡上任意一點所需滿足的最小超障余度。
2.2.2 IFP航段保護區

式(9)中,點表示航跡上任意一點;示航空器飛行在某一點上最大偏移值;表示航跡上某一點處對應的保護區半寬。
2.2.3 最短航段距離
當航路點屬性為Fly by時,此時該航段的最短距離應滿足式(10)。

式(10)中,表示航路點轉彎所需的MSD。
當航路點屬性為Fly over時,此時該航段的最短距離應滿足式(11)。

式(11)中,表示航路點轉彎所需的MSD。
2.2.4 最大轉彎角度
轉彎角度表示的是下一航段相對上一航段偏轉角,在理論上,其取值范圍介于0°~180°之間,如式(12)所示。

2.2.5 最大轉彎離場角度
航空器性能限制其在起飛離場時爬升至某一高度,再轉彎加入離場航線的最大角度,如式(13)所示。

2.2.6 最大爬升梯度
根據規定,離場程序設計時,航空器爬升梯度不應超過10%,如式(14)是航空器爬升梯度約束表達。

式(14)中,Δ表示航跡上前后兩點之間的高度差,即h-h;表示航空器從前一航跡點至后一航跡點之間的水平距離。
2.3 優化目標函數
在飛行程序優化過程中,優先考慮安全余量最大作為優化目標,在滿足安全余量最大情形下,再分別考慮航空器飛行距離最短、航路點個數最少以及轉彎次數最少作為次優化目標,目標函數如式(16)—式(18)。
2.3.1 安全余量最大

根據式(15),可得航跡相對障礙物最大安全余量和目標表達式如式(16)。

2.3.2 飛行距離
2.3.3 航路點個數最少
在起始點至終點之間采取逐個添加航路點方法。假設從起點至終點之間可取=(=1,2,3,…)個航路點,按最短穩定距離將個航路點分別劃分至K個階段,然后分別求解=取值時,在K階段下滿足最短飛行距離及越障要求的航路點。
2.3.4 飛行路徑平滑程度
在進行飛行程序優化時,應減少飛行轉彎次數,盡量保證航空器直線飛行。針對此,如式(18)給出了飛行路徑平滑程度評價表達式。

2.4 優化仿真流程
運用上述構建的離場飛行程序優化方法,借助于遺傳算法,沿大圓航線對原有飛行程序進行尋優改進。
2.4.1 染色體編碼
在這里,是將遺傳算法中的染色體看作空間中的一個航路點,即一個染色體對應一個航路點。顯然,若染色體個數越多,航路點的個數也越多,則最后搜尋得到航跡就越接近于理論上最優解。
在生物進化過程中,生物DNA存在4種堿基對,DNA上4種堿基對的不同排列方式則表示不同的DNA編碼,從而導致基因的表現出來的性狀不同。同理,在計算機就算過程中,模仿生物DNA編碼方式,將0、1兩種取值看作兩種不同堿基對,由0、1兩種堿基對構成的不同的二進制字符串則可表示不同實數。
2.4.2 個體
個體表示的是航路點,也表示一個染色體,且計算機求解過程中將其編碼為一串由0、1二進制數構成的向量。
2.4.3 種群及種群初始化
種群表示的是個體的集合,在這里則代表所有航路點集合。
種群的初始化是可行區域中滿足約束條件下所有可能的航路點集合。在本文計算中,種群初始大小取值為50。
2.4.4 適應度計算與選擇
選擇的主要目的是將通過種群初始化得到種群利用給定的適應度規則把優秀個體保留下來,即就是通過適應度值選擇出最佳的航路點。在這里,適應度值是以飛行距離、安全余量及飛行路徑平滑程度作為評價指標,并進行加權得到個體選擇適應度函數,如式(19)所示。

式(19)中,權重、、均是根據具體需求給定,其中計算所得適應度值越大越好。
確定每個個體適應度值后,根據式(20)計算每個個體相對適應度,該值用于估計個體被保留下來的概率。

式(20)中,=1,2,…,,表示初始化后種群個體數。
2.4.5 交叉和變異
經過選擇得到了當前看來最符合的航路點,但這有可能并不是最優的。為防止出現局部最優情況,需通過生物進化繁殖后代即交叉與變異過程來不斷地更新產生比當前更優的個體。
交叉操作是將兩個個體的染色體上的基因型進行交換,在這里,即就是將航路點、、坐標序列進行兩兩互換。而變異操作就是改變某個個體的染色體上的基因。也就是將航路點、、坐標取值用另一個數值替代。一般來說,交叉概率值通常取0.8,變異概率值通常取0.005。
最后,多次反復進行選擇、交叉、變異這一過程,迭代出最優個體,即找到當前最優的航路點,并將航路點連接起來,即可獲得從起始點至終點的一條最優飛行路徑。
3 仿真實驗與結果分析
圖4表示××機場××跑道一條離場程序,航空器沿040°方向從跑道末端起飛,飛越CJ411航路點至CJ505航路點,然后再按航路點P167、P159、LLC順序飛行,至離場結束位置。
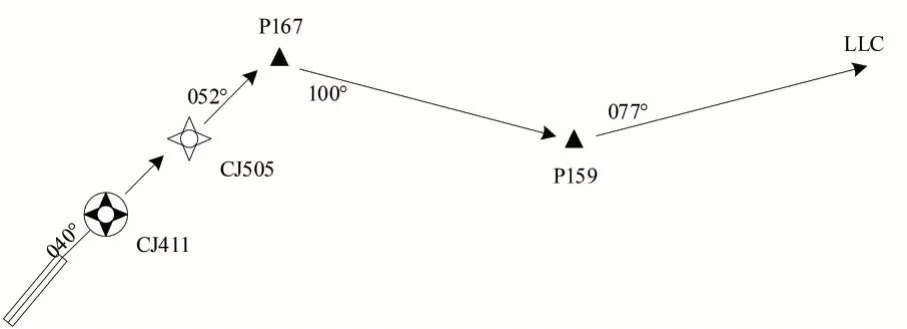
圖4 ××跑道××離場程序
優化前的××跑道××離場程序如圖5所示。
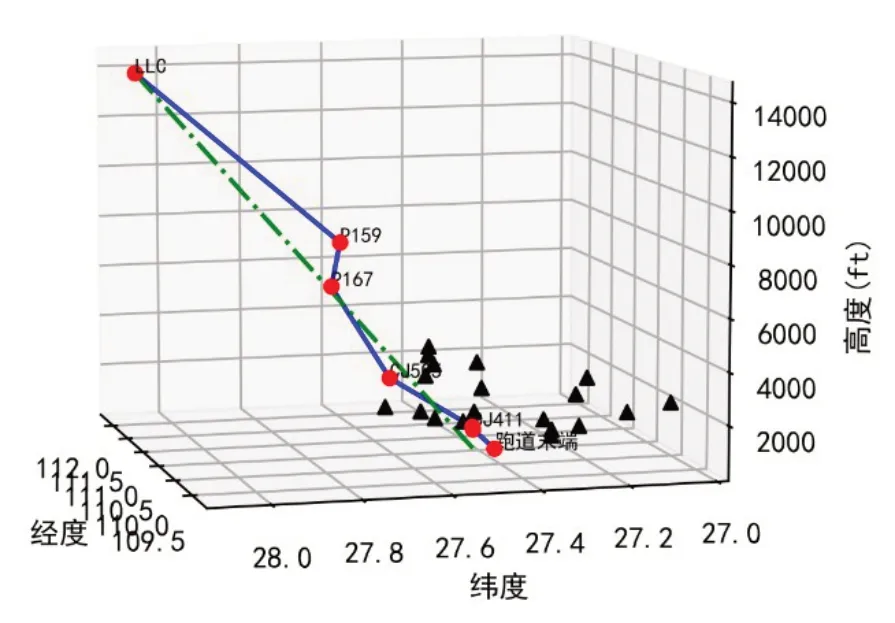
圖5 優化前××離場飛行路徑
仿真條件:假設航空器此次最大轉彎角度為75°;最大爬升梯度為4.8%,且梯度為均勻增加;路徑搜索過程中最大迭代次數為5500次。優化后飛行路徑如圖6所示。
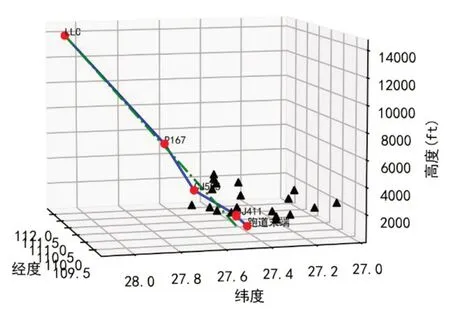
圖6 優化后飛行路徑
從起點至終點沿大圓航跡距離為137.85 NM,相比優化前程序,航圖距離減少了9.37 NM,安全余量增加了0.13 NM,航路點個數減少了1個。優化前后飛行路徑距離及安全余量對比如表1所列。
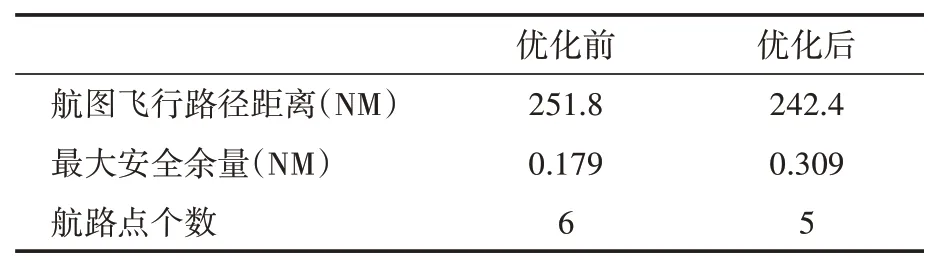
表1 優化前后飛行程序對比
4 結語
本文在不考慮飛行限制區和ATC管制要求的前提下,對某機場現有飛行程序進行優化改進,仿真結果可以看出,在滿足約束條件情形下,本文提出的離場程序優化方法可以實現從跑道末端至離場結束時的飛行路徑規劃,并且規劃后的結果相比原有飛行程序路徑更加平直、飛行距離更短、安全余量更大。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
