基于時(shí)不變點(diǎn)狀波束優(yōu)化的目標(biāo)距離-角度聯(lián)合估計(jì)
2022-04-21 02:07:56劉云清劉文宇李曉龍
電子與信息學(xué)報(bào) 2022年4期
初 偉 劉云清 劉文宇 李曉龍
(長春理工大學(xué)電子信息工程學(xué)院 長春 130022)
1 引言
在不考慮電磁波傳播衰減的情況下,相控陣?yán)走_(dá)發(fā)射波束的增益僅與角度有關(guān),在距離維上不受控[1]。近年來,為了克服這一缺點(diǎn),一種新體制頻控陣(Frequency Diverse Array, FDA)雷達(dá)越來越得到關(guān)注[2]。該方法的本質(zhì)是在天線發(fā)射陣列單元上增加一個(gè)小的頻率增量,以生成與距離-角-時(shí)間相關(guān)的發(fā)射波束方向圖。與傳統(tǒng)雷達(dá)使用的調(diào)頻技術(shù)不同,F(xiàn)DA發(fā)射波束可以周期性地掃描空間區(qū)域,并在距離、角度和時(shí)間維度上形成波束聚焦,聚焦效果會(huì)隨著頻率的增加而變化[3]。因此,F(xiàn)DA在目標(biāo)定位、波束自動(dòng)掃描和距離相關(guān)的雜波干擾抑制等方面優(yōu)于傳統(tǒng)相控陣[4]。此外,雖然多輸入多輸出(Multiple-Input Multiple-Output, MIMO)雷達(dá)通過波形分集可以有效地獲得時(shí)間和空間上的自由度,使其擁有許多傳統(tǒng)相控陣?yán)走_(dá)無法實(shí)現(xiàn)的功能。但是在復(fù)雜的道路和多目標(biāo)的環(huán)境中,特別是在目標(biāo)角度相同或目標(biāo)距離相近時(shí)無法獲得令人滿意的結(jié)果。而FDA-MIMO體制雷達(dá)由于其在距離-角度維度波形優(yōu)勢,成為一種解決上述問題的方法[5–9]。
頻控陣?yán)走_(dá)在使用不同的頻偏調(diào)制方法時(shí),會(huì)產(chǎn)生不同的波束圖效果,向每個(gè)陣元引入一個(gè)固定頻率值時(shí),會(huì)使發(fā)射波束圖產(chǎn)生周期性條帶狀圖案。文獻(xiàn)[10]提出一種基于對數(shù)頻偏 (Logarithmi -cally Increased Frequency Offset, LIFO) 的FDA,它可以將發(fā)射波形的能量集中在單個(gè)目標(biāo)區(qū)域。文獻(xiàn)[5]采用固定頻偏式(Identical Frequency Increment, IFI)多輸入多輸出頻控陣?yán)走_(dá)(FDA-MIMO)去抑制距離相關(guān)的干擾,提高了接收信噪比(Signal Noise Ratio, SNR)。FDAMIMO雷達(dá)利用發(fā)射波形的特點(diǎn),可以將發(fā)射能量有效地匯聚在感興趣的距離和角度區(qū)域。一種適用于頻控陣?yán)走_(dá)的不等尺寸子陣結(jié)構(gòu)被提出來,通過使用可變寬度的波束,使目標(biāo)在距離和角度維度上獲得更大的聚焦,以使接收機(jī)接收到的回波有助于更好地估計(jì)目標(biāo)參數(shù)。文獻(xiàn)[11]應(yīng)用改進(jìn)的兩級(jí)旋轉(zhuǎn)不變算法(two-stage Estimating Signal Parameter via Rotational Invariance Techniques, twostage ESPRIT)在FDA-MIMO雷達(dá)上。但是由于發(fā)射波束圖的時(shí)變性,實(shí)際能量匯聚到目標(biāo)的持續(xù)時(shí)間很短,使得從目標(biāo)反射到接收天線的能量很小,因此并不能有效抑制與距離有關(guān)或者與距離-角度相關(guān)的干擾。為了解決發(fā)射波束圖周期性變化,文獻(xiàn)[12]通過時(shí)間調(diào)制優(yōu)化頻率偏移實(shí)現(xiàn)了一種時(shí)不變的空間聚焦波束圖。距離相關(guān)波束形成可以有效地抑制同一角度、不同距離目標(biāo)的干擾,這是傳統(tǒng)MIMO雷達(dá)所無法做到的。然而,目前學(xué)者主要研究固定頻偏和基于對數(shù)函數(shù)的非線性頻偏體制FDA-MIMO,而它們的波形分別是周期性的和時(shí)變的。
因此,有必要研究基于時(shí)不變點(diǎn)狀波束方向圖的雷達(dá)目標(biāo)參數(shù)估計(jì)性能。在前期完成了應(yīng)用改進(jìn)的加速粒子群算法(New Accelerated Particle Swarm Optimization, NAPSO)去實(shí)現(xiàn)時(shí)不變、低旁瓣和空間聚焦的波束優(yōu)化的基礎(chǔ)上[13],建立時(shí)間調(diào)制距離補(bǔ)償式(Time Modulation and Rang Compensation, TMRC)FDA-MIMO雷達(dá)數(shù)學(xué)模型。并在此種體制雷達(dá)下,提出了一種通過旋轉(zhuǎn)不變技術(shù)進(jìn)行兩階段信號(hào)參數(shù)估計(jì)的方法以實(shí)現(xiàn)目標(biāo)角度和距離的聯(lián)合估計(jì)。此外,還分別推導(dǎo)了TMRC-FDA-MIMO雷達(dá)目標(biāo)角度和距離估計(jì)的克拉默-拉奧下界(Cramér-Rao Lower Bound, CRLB)和均方誤差(Root Mean Squared Error, RMSE)的封閉式數(shù)學(xué)公式以驗(yàn)證其性能。
2 TMRC-FDA-MIMO雷達(dá)數(shù)據(jù)模型

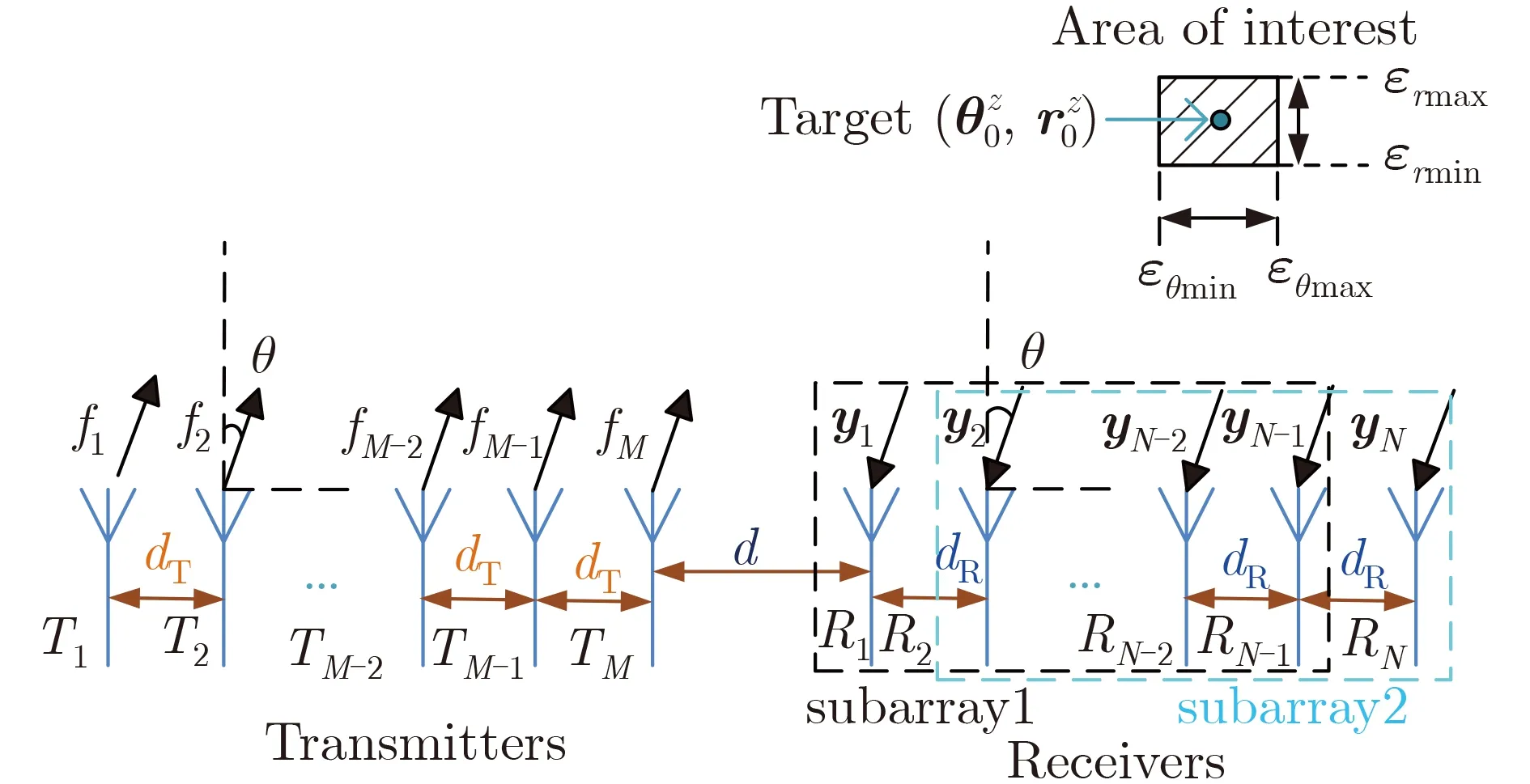
圖1 TMRC-FDA-MIMO雷達(dá)收發(fā)子陣劃分方案

3 距離-角度聯(lián)合估計(jì)
3.1 算法模型推導(dǎo)
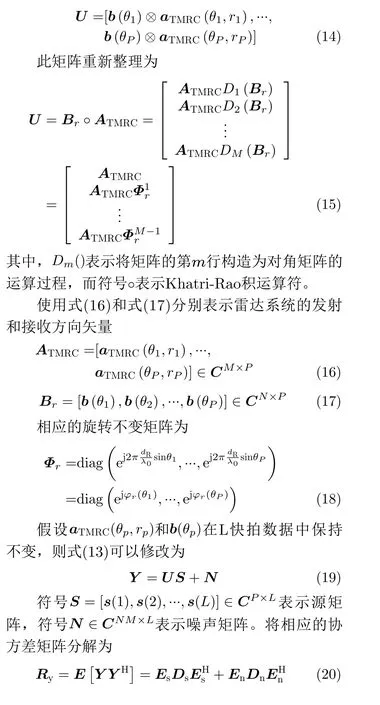
所有P個(gè)目標(biāo)的聯(lián)合發(fā)送-接收引導(dǎo)向量可以表示為矩陣

因此,基于TMRC-FDA-MIMO的距離-角估計(jì)算法步驟如表1所示。

表1 距離-角度聯(lián)合估計(jì)算法步驟
3.2 算法復(fù)雜度分析
過比較這兩個(gè)表達(dá)式,很容易發(fā)現(xiàn)所提出算法的計(jì)算復(fù)雜度要小得多。
4 數(shù)值分析
4.1 TMRC-FDA-MIMO波束成形和雷達(dá)目標(biāo)定位

圖2 基于TMRC-FDA的波形響應(yīng)
圖3(a)和圖3(b)分別為基于MUSIC算法的TMRC-FDA-MIMO雷達(dá)的目標(biāo)距離和角度響應(yīng)結(jié)果。并對應(yīng)用MUSIC算法和本文提出的算法所需時(shí)間進(jìn)行了仿真。仿真結(jié)果表明,MUSIC算法的運(yùn)行時(shí)間為70.411873 s,而所提算法的運(yùn)行時(shí)間為2.356412 s,這與理論分析的結(jié)果相一致。不難看出,在相同的定位精度情況下,本文提出的算法優(yōu)于MUSIC算法。
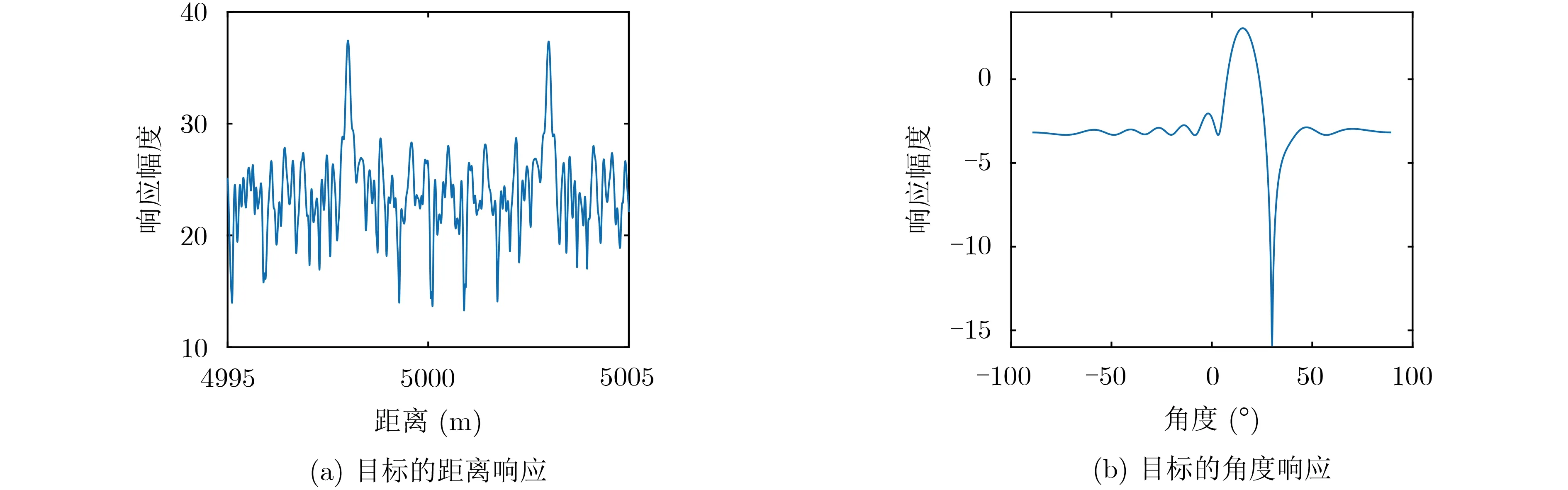
圖3 基于MUSIC算法的兩個(gè)近距離同角度目標(biāo)的響應(yīng)
4.2 性能分析
4.2.1 CRLB性能
圖4(a)和圖4(b)分別為3種雷達(dá)系統(tǒng)(TMRCFDA-MIMO, IFI-FDA-MIMO和LIFO-FDAMIMO)下相應(yīng)的角度和距離的CRLB。為保證結(jié)果有效性,設(shè)定3種雷達(dá)參數(shù)相同。在SNR值從–20~20 dB變化時(shí),從圖4(a)可以看出,LIFOFDA-MIMO和TMRC-FDA-MIMO雷達(dá)角度CRLB的值近似相等,均低于IFI-FDA-MIMO,在SNR等于–20 dB時(shí),產(chǎn)生最大差值0.10907,從圖4(b)可以看出,TMRC-FDA-MIMO雷達(dá)體制距離CRLB遠(yuǎn)低于IFI-FDA-MIMO和LIFO-FDAMIMO這兩種,且在相同SNR下,LIFO-FDAMIMO更高一些。所以在相同SNR下,TMRCFDA-MIMO的CRLB優(yōu)于其他兩種體制雷達(dá)。

圖4 比較了3種雷達(dá)系統(tǒng)的CRLB

圖5 在不同的SNR下目標(biāo)的RMSE曲線
4.2.2 均方根誤差(RMSE)的性能分析
5 結(jié)論
FDA-MIMO雷達(dá)在距離和角度的聯(lián)合估計(jì)中具有潛在的應(yīng)用前景,但由于其發(fā)射波束圖的時(shí)變性和周期性,導(dǎo)致發(fā)射能量發(fā)散和不受控,制約著其應(yīng)用。本文基于TMRC-FDA-MIMO雷達(dá)系統(tǒng),應(yīng)用改進(jìn)ESPRIT算法,實(shí)現(xiàn)了波束圖的聚焦性,完成了目標(biāo)距離-角度聯(lián)合估計(jì)。通過角度和距離估計(jì)的CRLB和RMSE,與目前存在的兩種雷達(dá)(LIFO-FDA-MIMO, IFI-FDA-MIMO)進(jìn)行了性能對比,驗(yàn)證了所提TMRC-FDA-MIMO雷達(dá)的優(yōu)越性。并與應(yīng)用在TMRC-FDA-MIMO雷達(dá)的MUSIC算法的復(fù)雜性和性能進(jìn)行了對比,結(jié)果證明了所提ESPRIT算法的優(yōu)越性。
