一種深度學習輔助的探地雷達定位方法
2022-04-21 02:06:14倪志康葉盛波鄭之杰方廣有
電子與信息學報 2022年4期
倪志康 葉盛波 史 城 潘 俊 鄭之杰 方廣有*
①(中國科學院空天信息創新研究院 北京 100094)
②(中國科學院電磁輻射與探測技術重點實驗室 北京 100094)
③(中國科學院大學電子電氣與通信工程學院 北京 100049)
1 引言
隨著自動駕駛技術的發展,越來越多的定位方法被應用于確定車輛的精確位置中[1]。普遍使用的車輛定位方法是全球導航衛星系統[2],但是全球導航衛星系統容易受到城市高樓、茂密植被以及隧道的影響,使得GPS衛星信號的接收受到干擾導致無法定位。另一類車輛定位方法是通過車載傳感器(例如光學相機[3]和激光雷達[4]等)感知車輛周圍的環境信息來將車輛精確定位在先前記錄的高精度地圖中,但當環境特征發生變化時,例如在雨、雪、沙塵、強光以及黑暗等環境下,激光雷達和光學相機等傳感器會因為無法準確感知外界環境信息的變化導致失效。探地雷達作為一類非侵入式的地下目標探測技術[5],已經被廣泛應用在城市道路病害探測[6]、工程質量檢測[7]以及深空探測[8]等眾多領域中。由于大多數地下目標在時間尺度上基本保持不變,且受地面上環境變化的影響小,而探地雷達作為一種超寬帶雷達,受雨雪、沙塵的影響較小,因此探索利用探地雷達技術感知地下環境實現車輛在惡劣環境下的定位具有重要意義。
將探地雷達技術應用于車輛定位領域目前還處于探索階段。先前的工作主要將探地雷達搭載在機器人平臺上完成對地下目標分布的自動建圖[9],但是都沒有將建立好的地圖用于機器人的定位。美國麻省理工林肯實驗室提出了一種基于先驗地圖的探地雷達定位方法—定位探地雷達(Localization Ground Penetrating Radar, LGPR)[10,11],其設計并使用一套包含12個天線單元的頻率步進體制探地雷達線陣系統,通過開關控制通道的切換使該探地雷達系統一幀掃描可以收集11個通道的數據。在LGPR建圖時,使用該探地雷達線陣系統收集地下目標回波數據和高精度GPS信息來構建地下目標回波數據先驗地圖。在定位時,將探地雷達系統采集的一幀當前地下目標回波數據與先前構建的先驗地圖數據計算相似度,輸出相似度最高的先驗地圖數據對應的GPS信息作為定位的結果。林肯實驗室提出的LGPR使用頻率步進體制的探地雷達線陣系統結構復雜,同時計算探地雷達原始回波數據之間的相似度,容易受到回波數據中噪聲、抖動以及異常值等因素的干擾,使得探地雷達在同一位置處兩次收集到的回波數據之間相似度可能很低,導致定位誤差偏大。同時由于實際地下目標分布一般是稀疏的,在探地雷達回波數據中,目標回波部分只占其中很小一部分,因此直接計算原始回波數據間的相似度會存在很多冗余計算。
本文針對目前基于探地雷達的定位方法使用原始回波數據構建地下目標數據地圖魯棒性差,數據計算量大以及數據傳輸量大的問題,提出深度學習輔助的探地雷達定位方法。其核心思想是利用深度卷積神經網絡(Deep Convolutional Neural Network, DCNN)提取探地雷達回波數據中的目標特征,構建地下目標的特征指紋地圖,而不是回波數據地圖,計算目標特征間的相似度,提高對離群數據干擾的魯棒性,同時結合測距輪測量的里程信息,實現多傳感器融合定位,減小定位誤差。本文的主要創新工作如下:(1)提出使用DCNN提取探地雷達回波數據中的目標特征,構建地下目標特征指紋地圖,減小數據的計算量以及數據的傳輸量,降低異常值對特征指紋地圖匹配結果的影響;(2)基于粒子群優化方法加速與特征指紋地圖間匹配計算速度,保證定位方法運行實時性,融合測距輪信息和探地雷達定位結果,有效減小定位誤差,提高定位精度。
2 算法框架
所提算法框架如圖1所示,主要分為離線建圖和在線定位兩個階段。離線建圖階段,依靠探地雷達的運動采集地下目標回波數據并使用預訓練的DCNN提取回波數據中的目標特征,將目標回波數據特征與采集的地理位置信息相結合,生成用于特征檢索的帶有地理位置信息標記的地下目標特征指紋地圖。在線定位階段,首先探地雷達會采集當前位置的回波數據并利用預訓練的DCNN提取出目標特征,然后利用粒子群方法在特征指紋地圖上搜索和當前位置回波特征最相似的特征,并輸出對應的地理位置信息,得到探地雷達定位結果。最后通過卡爾曼濾波融合探地雷達定位結果和測距輪的里程信息,輸出最終定位結果。
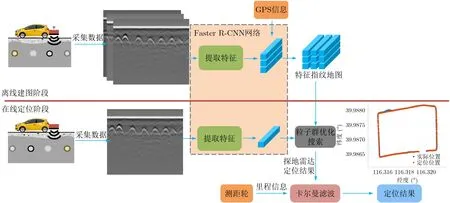
圖1 深度學習輔助的探地雷達定位方法框圖
2.1 基于DCNN構建地下目標的離線特征指紋地圖
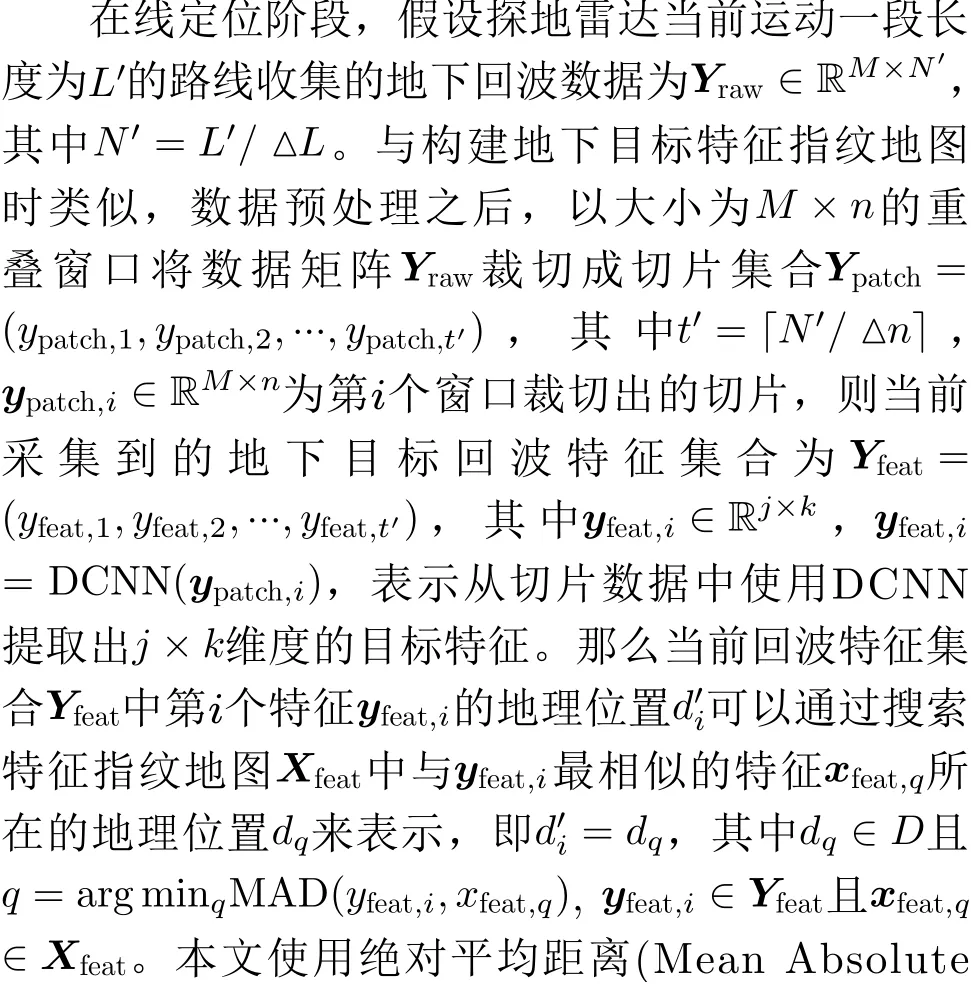
在離線構建地下目標特征指紋地圖時,假設探地雷達沿著長度為L的測線收集地下目標回波數據Xraw。探地雷達每次采集的數據點個數為M,每道數據間采集間隔(道間距)長度為?L,則收集到的回波數據Xraw∈RM×N,其中N=L/?L。數據預處理之后,以大小為M×n的重疊采樣窗口將數據矩陣Xraw裁切成切片集合Xpatch= (xpatch,1,xpatch,2,...,xpatch,t),其中t=「N/?n?,?n為重疊采樣窗口的間隔,xpatch,i ∈RM×n為第i個窗口裁切出的切片,同時獲得與切片集合一一對應的地理位置標記集合D=(d1,d2,...,dt)。則地下目標特征指紋地圖為Xfeat=(xfeat,1,xfeat,2,...,xfeat,t),其中xfeat,i ∈Rj×k,xfeat,i= DCNN(xpatch,i)表示從切片數據中使用DCNN提取出j×k維度的目標特征,本文使用的DCNN為Faster R-CNN網絡[12]。
由于光學圖像的目標特征和雷達圖像的目標特征差異較大,且光學圖像多為8 bit無符號整型數據,雷達圖像多為32 bit有符號整型數據,因此在光學圖像上預訓練的DCNN網絡權重不能運用到處理雷達圖像中[13]。本文使用工作頻率為270 MHz, 400 MHz和500 MHz的探地雷達在實際城市道路上收集地下目標實測回波數據用于重新訓練DCNN,共收集探地雷達B-scan回波圖2323張,回波數據圖的維度為416 × 416,其中600張回波數據用于測試網絡性能。Faster R-CNN網絡是一種經典的2階段目標檢測網絡,其首先通過主干網提取輸入圖像的全局特征,然后在提取的全局特征的基礎上,區域生成網絡和感興趣區域池化層提取出目標的局部特征[14,15],最后經過分類網絡和位置回歸網絡得到目標的類別與位置。Faster R-CNN網絡不同網絡層輸出的特征所包含的信息不同,網絡層越深提取出的特征越高級,而高層次的語義特征丟失了目標的空間分布信息,因此保留低層次的全局特征以及高層次的局部特征作為輸入圖像的描述符。在訓練階段,更新Faster R-CNN網絡的全部參數,當網絡訓練好后,固定網絡的權重同時去除網絡中的分類網絡和目標位置回歸網絡,此時Faster R-CNN網絡只用于提取輸入圖像的全局特征和局部特征。圖2顯示了Faster R-CNN網絡提取探地雷達目標回波數據特征示意圖,其中主干網絡為VGG16網絡,輸入雷達圖像大小為416 × 416,輸出的全局特征向量維度為1 × 1024,局部特征向量維度為5 × 512,數據量減小為原來的2%。

圖2 Faster R-CNN 網絡提取全局特征和局部特征示意圖
在網絡訓練階段,前1000次迭代設置初始學習率為0.002,后1400次迭代設置學習率為0.0002,權重衰減和動量大小分別設置為0.0005和0.9。訓練完成后,Faster R-CNN網絡在測試數據集上對探地雷達地下目標檢測的準確率達到90%,說明訓練后的網絡已經具備提取地下目標回波特征的能力。
2.2 基于粒子群優化的在線定位算法
計算當前回波數據特征與特征指紋地圖間相似度的最簡單的方法是窮舉法,但是隨著地圖數據庫越來越大,計算復雜度也會越高。粒子群優化方法是一種解決最優化問題的啟發式算法[17],能夠在很大搜索空間中搜索出候選解,同時對搜索的空間不做任何假設。相對于其他啟發式算法來說,粒子群優化方法易于實現且復雜度相對較低,因此本文基于粒子群優化方法加速特征間的相似度計算。粒子群優化方法首先在搜索空間中隨機創建沒有體積和質量的粒子,每個粒子具有位置屬性和速度屬性,位置屬性代表粒子在搜索空間中的位置,速度屬性用于控制算法迭代時粒子位置更新。每個粒子在迭代過程中會向著粒子群已經搜索到的全局最優位置和粒子本身歷史最優位置不斷接近,不斷迭代尋找最優值。隨著計算的推移,通過探索和利用搜索空間中已知的有利位置,粒子圍繞1個或多個最優點聚集。粒子群優化算法迭代公式為

使用粒子群優化方法搜索當前回波特征和特征指紋地圖間相似度的過程可以分為兩個階段:初始搜索階段和局部搜索階段。初始搜索階段在特征指紋地圖上搜索和當前回波數據的全局特征最相似的幾個候選特征。由于全局特征失去了目標間的空間分布關系,因此在全局特征搜索結果的基礎上再搜索局部特征最相似的特征,得到最終搜索結果。
2.3 基于卡爾曼濾波的多傳感器融合算法
基于探地雷達的定位方法在不存在地下目標、地下目標回波弱和地下目標分布相似時,由于無法感知到有效的目標信息,因此會存在較大的定位誤差,使得定位結果不穩定。卡爾曼濾波是一種對線性系統最優的估計算法[18],本文在探地雷達獲取的定位結果的基礎上,利用卡爾曼濾波融合測距輪測量的里程信息,減少探地雷達定位的不穩定性,以實現對車輛高精度的定位。為簡化問題,本文假設車輛近似于勻速運動狀態,因此可通過車輛的勻速運動方程得到車輛k+1時刻狀態g(k+1)和k時刻狀態g(k)的更新關系為

利用卡爾曼濾波將探地雷達定位結果和測距輪的里程信息相融合,能夠平滑探地雷達定位產生的離群點,減少定位誤差的抖動,從而可以獲得車輛更為精確的位置。
3 系統參數設置
深度學習輔助探地雷達定位方法系統平臺如圖3所示,主要包括探地雷達、測距輪、車載平臺、地理位置信息采集器以及高性能計算機(圖3中未展示)。其中探地雷達為中國科學院空天信息創新研究院自主研發的500 MHz單發單收探地雷達,帶有一個編碼測距輪。500 MHz探地雷達最大探測深度介于1 m和5 m之間,能夠探測常見的城市道路地下埋藏目標,雖然其體積較大,但未來使用的時候可以通過重新設計天線結構和電子學器件來方便集成于汽車底部。100 MHz和200 MHz探地雷達雖然最大探測深度深,但是體積相對于500 MHz探地雷達來說更大且一般城市道路地下目標埋深不會太深。800 MHz, 1000 MHz以及1600 MHz探地雷達雖然體積較小,但是最大探測深度較淺,在一些地下目標埋深較深的場景下可能無法有效探測到目標。地理位置信息采集器采用海星達高精度差分GPS接收器。高性能計算機搭載英偉達GTX 1080 Ti顯卡加速DCNN的計算。系統詳細參數如表1所示。
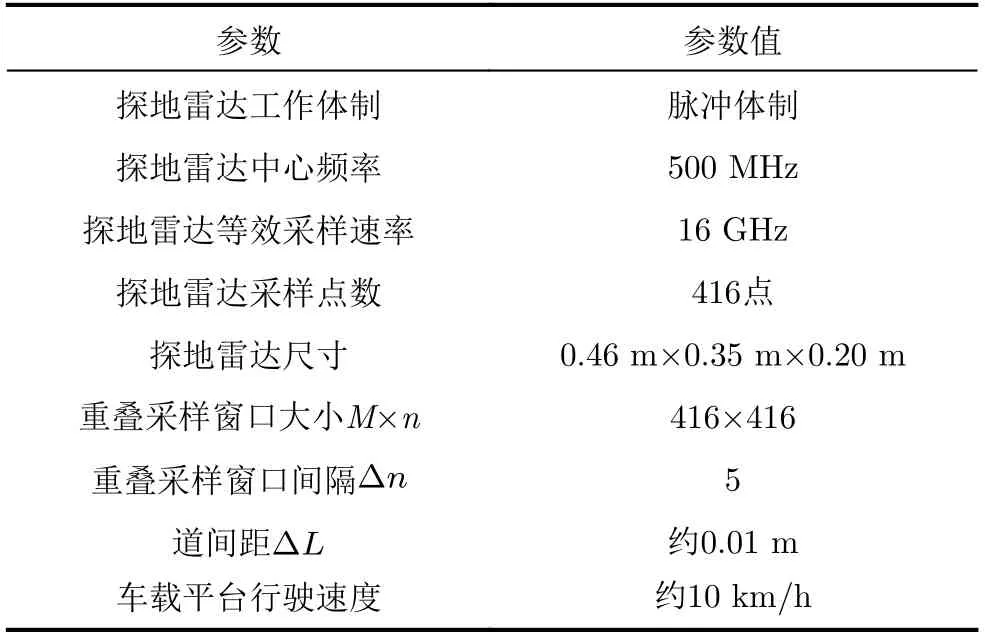
表1 系統詳細參數

圖3 深度學習輔助探地雷達定位系統車載平臺圖
4 實驗結果與分析
在兩處不同的室外場景下測試與驗證所提深度學習輔助探地雷達定位方法的定位性能。實驗場景1如圖4(a)所示,為一段60 m × 4 m的水泥道路,其地下每隔約0.5 m分布有埋深約0.2 m的鋼筋結構,可提取出的地下目標回波信息多,但是存在一些目標特征分布相似的區域;實驗場景2如圖4(b)所示,為一段長度約500 m的實際城市道路,地下埋藏的管道目標分布稀疏,還存在一些位置檢測不到目標回波。場景1中定位的參考位置使用激光測距儀測得,場景2中定位的參考位置通過高精度GPS接收器獲取。

圖4 實驗場景圖
在實驗場景1中獨立進行6次實驗來驗證定位方法的定位性能。每次實驗中,探地雷達沿隨機路線移動約55 m距離,每隔約0.01 m收集一次地下目標的回波數據,經過Faster R-CNN網絡提取出地下目標特征之后,建立地下目標特征指紋地圖。在定位階段,探地雷達盡量沿著建圖階段的路線移動,以保證在定位階段探地雷達能掃過和建圖階段相同的地下目標,定位階段探地雷達移動距離約50 m。比較回波數據地圖定位方法(即利用探地雷達原始回波數據構建回波數據地圖來定位)和本文所提方法的實驗結果,如圖5所示。從圖5(a)可知,由于地下目標回波信息豐富,因此所有定位方法的平均定位誤差均小于5 m。注意到回波數據地圖定位方法受到回波數據微小變化以及異常值的影響大,導致其誤差在4種定位方法中最大。通過卡爾曼濾波融合測距輪的里程信息后,回波數據地圖方法和特征指紋地圖方法定位誤差分別降低20%~70%,說明融合其他傳感器數據能提升定位性能。由于特征指紋地圖的定位方法對回波數據中異常值的敏感程度降低,因此其定位誤差在6次實驗中均小于基于回波數據地圖的定位方法,且加入卡爾曼濾波融合測距輪信息之后,其6次實驗的平均定位誤差比回波數據地圖方法的定位誤差減小85%,均小于1.2 m。從圖5(b)能看出,本文所提融合特征指紋地圖和測距輪信息的定位方法的誤差閾值小于1 m的數據占比80%,優于其他方法。由表2可知,僅將單一的探地雷達作為定位的結果時,受限于地下目標回波不明顯以及存在地下目標回波相似的區域,定位結果存在跳變,最大定位誤差均大于5 m。融合測距輪信息后,回波數據地圖定位方法和特征地圖定位方法的最大定位誤差分別減少15%和80%,而計算量并沒有明顯增加。本文所提方法的定位頻率要比回波數據地圖定位方法高出約9倍。

表2 場景1中單次實驗下不同方法的最大定位誤差和計算時間比較

圖5 實驗場景1中不同定位方法的定位結果對比圖
與場景1的實驗不同,在進行場景2實驗前先使用探地雷達沿場景2中實際城市道路移動約500 m距離建立地下目標特征指紋地圖。在定位階段,使用探地雷達在6個不同時刻沿著建圖階段的路線移動約500 m距離進行定位,不同定位方法的實驗結果如圖6所示。可以看到由于實際城市道路場景中地下目標分布稀疏,在一些位置處沒有明顯的目標回波,導致所有定位方法的平均定位誤差均大于1.5 m。雖然可以通過累積大范圍內探地雷達采集的數據來減輕地下目標分布稀疏或者地下紋理特征信息相似帶來的影響,但是數據計算量和存儲量也會變大。回波數據地圖方法的平均定位誤差最大,僅有30%的情況可以將定位誤差控制在2 m以內,雖然融合測距輪的里程信息后誤差在2 m內的數據占比提高到53%,但本文所提方法在6次實驗中的平均定位誤差均小于2.5 m,比回波數據地圖方法的定位誤差減少70%,同時定位誤差小于2 m的數據占65%,定位誤差閾值在3 m內的占88%。從表3可以看出僅用回波數據地圖時最大定位誤差接近30 m,融合測距輪里程信息后最大誤差也達到11 m,說明在實際城市道路上直接使用原始雷達回波數據構建地圖進行定位的穩定性很差。雖然特征指紋地圖定位方法對回波數據變化有魯棒性,但也受到地下目標分布稀疏的影響,其最大定位誤差將近17 m,利用卡爾曼濾波融合測距輪信息后,最大誤差相比于融合前減少83%,達到2.82 m,有效地提高了定位精度。同時本文所提定位方法定位頻率達到13.11 Hz,滿足實時性要求。
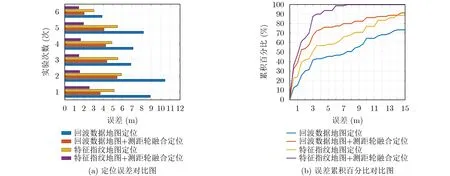
圖6 實驗場景2 中不同定位方法的定位結果對比圖
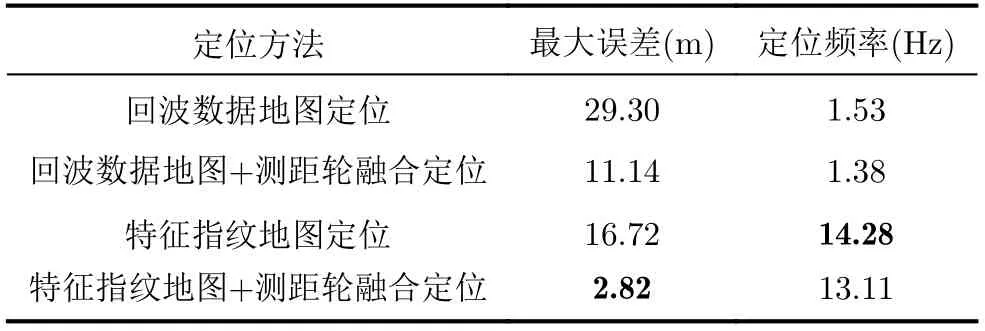
表3 場景2 中單次實驗下不同方法的最大定位誤差和計算時間比較
圖7展示了場景1中1次實驗采集的長度約50 m的地下目標特征指紋地圖(僅將從回波數據中提取的全局特征作為特征指紋地圖)。從圖7(a)能看出每個位置提取地下回波的主要特征分布相似,這是因為探地雷達B-scan回波數據間的主要特征很相似(回波數據中主要是收發天線直耦波、地面回波以及地下分層回波),尤其是在同一個區域收集的回波數據。盡管主要特征分布相似,但是所提出定位方法基于特征向量間的差異。圖7(b)是將圖7(a)中的特征向量減去其在距離維度上的均值得到的結果,從圖7(b)能看出減去均值之后,每個距離上提取的地下目標回波特征存在較大差異。
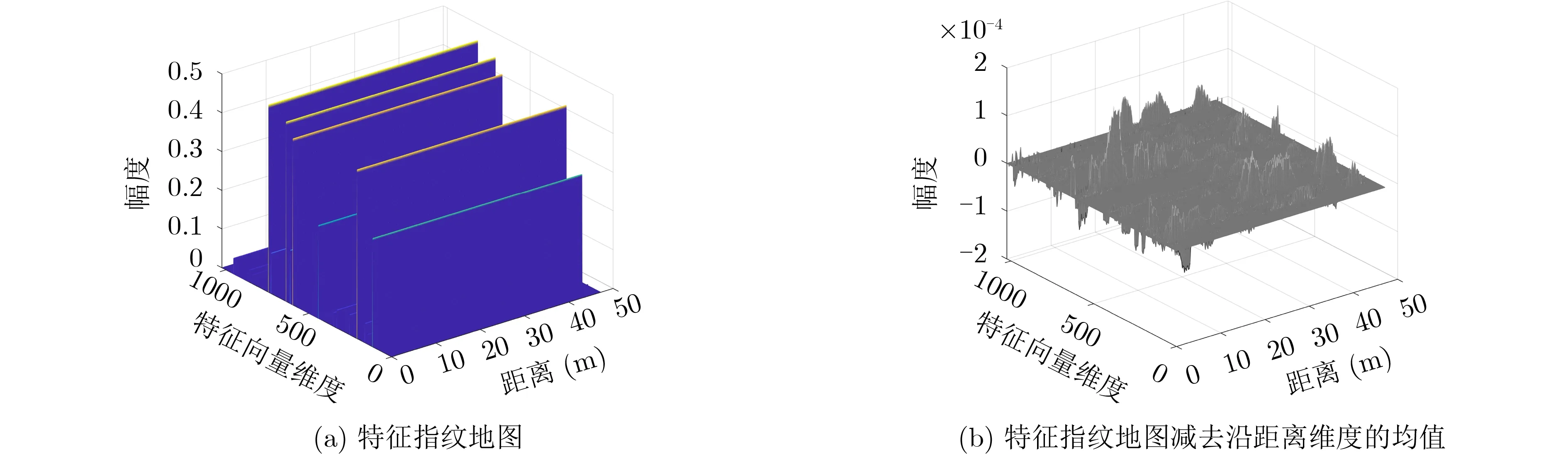
圖7 實驗場景 1 中采集的地下目標特征指紋地圖
圖8展示了場景1中1次實驗采集的原始回波數據。在圖8(a)和圖8(b)中,前25 m采集的地下目標回波數據相似度高,此區域的定位誤差較小。與圖8(a)相比,在定位階段圖8(b)中25~35 m位置采集的地下目標回波受到雜波干擾,這些異常值的干擾會增大定位誤差。圖8(b)中40~45 m位置處由于建圖階段和定位階段路線的偏移導致采集的回波數據和圖8(a)相比存在較大差異,這部分差異會嚴重影響定位精度。

圖8 實驗場景 1 中采集的原始回波數據
5 結束語
面對常用的視覺、激光等傳感器在惡劣環境下會因為無法正確感知外界環境變化而失效的問題,本文提出一種深度學習輔助的探地雷達定位方法,通過探地雷達感知地下基本固定不變的埋藏目標來實現車輛位置的確定。所提方法首先采用Faster RCNN網絡提取探地雷達收集的地下目標回波數據中的目標特征,構建地下目標特征指紋地圖。然后基于粒子群優化算法計算探地雷達當前采集的目標特征和特征指紋地圖間的相似度得到探地雷達定位結果,避免直接使用原始回波數據計算相似度容易受到噪聲、異常值等因素干擾的問題,同時減少了數據計算量與傳輸量,保證定位算法的實時性。最后使用卡爾曼濾波融合探地雷達定位結果與測距輪測量的里程信息,得到更精確的定位結果。在實際城市道路上的實驗驗證所提方法的平均定位誤差比回波數據地圖方法的平均定位誤差降低70%,定位頻率滿足實時性要求,且所使用的探地雷達系統易于安裝和維護。深度學習輔助的探地雷達方法可以作為一種未來自動駕駛車輛在惡劣環境下感知定位的補充方法。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
河南科技(2014年23期)2014-02-27 14:19:15
