基于自適應離散粒子群算法的機翼調(diào)姿基準點優(yōu)化布局
2022-04-20 08:20:36高井濤鄭子君
科學技術(shù)創(chuàng)新 2022年11期
高井濤 鄭子君
(南昌航空大學航空制造工程學院,江西 南昌 330063)
在飛機數(shù)字化裝配中,機翼的裝配變形通常是由多個離散的調(diào)姿基準點的位置誤差來表示的,不同的調(diào)姿基準點布局所包含的機翼變形不盡相同,不合理的基準點布局將會降低機翼的位姿評價精度,增加裝配變形估計誤差,而引起機翼變形的主要原因之一是其自身重力。因此,為了提高裝配精度,如何布置調(diào)姿基準點引起了航空界的普遍重視。Shukla[1]等把由遺傳算法選出的測量點作為產(chǎn)品的關鍵特征,利用其幾何尺寸容差為產(chǎn)品診斷偏差模型提供參考。王鵬[2]通過NX 二次開發(fā)實現(xiàn)了9mm 點與圓孔中心點的選取,然后構(gòu)建預測矩陣來判別不同檢測點的貢獻度,通過剔除貢獻度較少的檢測點提高檢測效率。
1 調(diào)姿基準點優(yōu)化模型的建立
在飛機機翼的裝配中,機翼的總裝配變形由多種工藝影響因素共同造成,其變形一般由機翼上布置的基準點位置誤差來表示。設檢測點數(shù)量為e,并布置在機翼上e 個不同的部位,則各偏差源所造成的機翼裝配變形模式可表示為:

因此機翼由多偏差源導致的變形可表示為:
式中,q 表示個體貢獻值,w 表示高斯白噪聲。
本文實驗條件有限,因此機翼的變形因素僅考慮重力這一個因素,機翼變形重新定義為:
式中,V 為變形模式矩陣。
由式3 可定義q 的估計矩陣q'為

式中,q'的精度取決于隨機誤差水平。
從統(tǒng)計學角度評價q'的估計精度,即q'的協(xié)方差矩陣為
式中,E 表示數(shù)學期望值,φ 是噪聲矢量w 的協(xié)方差矩陣,Q 為費希爾信息矩陣。
當Q-l和V-l刪除基準點l 后,由有效獨立法[3]可知基準點l 的有效獨立性指標可表示為:

由式(6)可知,每個迭代中都會淘汰有效獨立性指標最小的基準點,經(jīng)過不斷迭代更新,最終剩下符合要求的基準點,從而獲得最優(yōu)基準點集。
式(6)通常可以實現(xiàn)從e 個檢測點中優(yōu)選出b 個基準點組成基準點集D,但優(yōu)選效果較差,本文采用自適應離散粒子群算法改善傳統(tǒng)檢測點優(yōu)選方法的效率低下和尋優(yōu)效果,目標函數(shù)如式(7)所示。

2 調(diào)姿基準點布局的優(yōu)化技術(shù)
2.1 優(yōu)化模型
為了提升機翼位姿的測量精度,根據(jù)式(8)可以選取符合系統(tǒng)要求的基準點數(shù)目:

式中,e 為初始待選基準點數(shù)目,b 為優(yōu)選基準點數(shù)目。
2.2 自適應離散粒子群算法
設離散粒子群算法在一個n 維的目標搜索空間中,有D 個粒子組成種群,則第i 個粒子位置可表示為Xi=(xi1,xi2,...xin),第i 個粒子的速度可表示為Vi=(vi1,vi2,...vin),(i=1,2,...,D)。第i 個粒子的最優(yōu)位置成為個體最優(yōu)值可表示為Pb=(pi1,pi2,...pin),整個種群的最優(yōu)位置即為全局最優(yōu)值為gb=(g1,g2,...gn),更新粒子位置和速度值:
其中:t 為迭代次數(shù),c1和c2為學習因子,r1和r2是[0,1]內(nèi)的隨機數(shù),vij表示為粒子的速度,xij表示為粒子的位置,i=1,2,...,D,j=1,2,...,D。
文中采用一種動態(tài)自適應慣性權(quán)重[4],通過對粒子當前的適應度值f 進行評價調(diào)整ω,當f>fa,此時目標函數(shù)值較差,因此為了使其向較好的搜方向靠攏,應當使慣性因子要大;當f-a<f<fa時,此時目標函數(shù)值較穩(wěn)定,這里可不改變慣性因子的值; 當f<f-a時,粒子的目標函數(shù)值比較好,此時則選用較小的慣性因子。改進后ω 可定義為:
式中,ωmax表示為ω 的最大值,ωmin表示為ω 的最小值; fmin表示當前所有粒子的最小適應值,fa表示當前所有粒子的平均適應值。f-a表示將所有小于fa的適應值相加取平均數(shù)。
本文的自適應離散粒子群算法的粒子在迭代過程中,其取值變化只限于0 和1,因此粒子位置xij更新公式可如下做如下變化:
式中,r 表示從(0,1)內(nèi)的隨機數(shù),粒子速度vij取值為1和0 的概率分別為s(vij)與1-s(vij)。
2.3 自適應離散粒子群算法基本步驟
2.3.1 自適應離散粒子群算法參數(shù)初始化。
2.3.2 計算個體的適應度值,當選取的基準點數(shù)量大于約束條件時,對適應度值進行懲罰計算,獲得粒子個體最優(yōu)位置p 和粒子的最優(yōu)值pb,以及粒子的種群全局最優(yōu)位置g 和種群全局最優(yōu)值gb。
2.3.3 自適應慣性因子的更新,計算相應的適應度值,判斷是否替換粒子個體最優(yōu)位置p 和最優(yōu)值pb,以及全局最優(yōu)位置g 和最優(yōu)值gb。
2.3.4 判斷是否滿足邊界條件,若滿足邊界條件,搜索過程結(jié)束,輸出全局最優(yōu)解;否則,繼續(xù)更新迭代,如圖1。
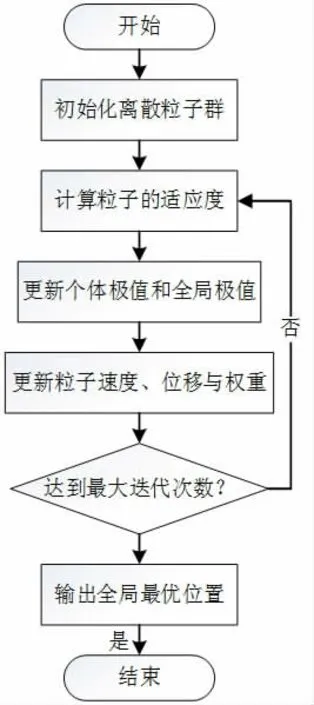
圖1 自適應離散粒子群算法流程
3 實例分析
3.1 機翼有限元分析
機翼實際結(jié)構(gòu)過于復雜,難以分析,因此對機翼與工藝接頭的結(jié)構(gòu)進行合理簡化為翼肋、梁和蒙皮三部分,其中,該機翼共有3 個梁,10 個翼肋,機翼外廓尺寸為1060mm×350mm×55mm。工藝接頭尺寸40mm×20mm×20mm,如圖2 所示。

圖2 機翼簡化結(jié)構(gòu)分析圖

圖3 機翼有限元模型
機翼有限元模型的單元類型為C3D8R,網(wǎng)格密度為5mm,其材料選用的是7075-T7451 鋁合金,彈性模量與泊松比分別為72GPa 與0.33,工藝接頭定義為剛體。機翼各個零部件之間是綁定約束。
3.2 機翼調(diào)姿基準點布局優(yōu)化結(jié)果
首先設置自適應離散粒子群優(yōu)化算法的初始參數(shù),種群規(guī)模p=300,學習因子c1=c2=0.7,迭代次數(shù)K=5000,初始慣性權(quán)重ω=0.9,開始對檢測點布局進行優(yōu)化,一般來說,機翼裝配時的測量基準點數(shù)量應不少于4 個,因此本文分別將基準點個數(shù)設置為10,12。同時文中還計算了基于經(jīng)典離散粒子群算法的基準點布局優(yōu)化以驗證自適應離散粒子群算法的有效性,從兩種算法運行結(jié)果看出,當自適應離散粒子群算法與經(jīng)典粒子群分別實現(xiàn)10、12 個基準點優(yōu)化布局時的目標函數(shù)值依次為0.1715 與0.17154、0.2329 與0.2329,并分別在迭代2218與2574、1955 與2503 代就已經(jīng)收斂,具體的優(yōu)化過程如圖4、5 所示。
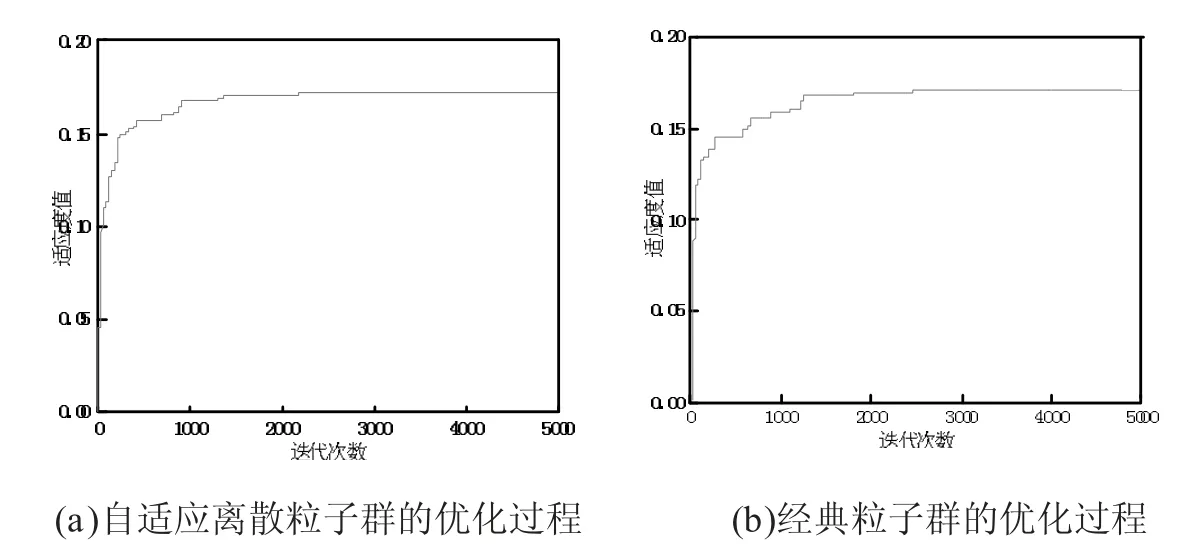
圖4 布設10 個基準點時兩種算法的優(yōu)化效果
通過比較圖4,圖5 以及上述分析可以發(fā)現(xiàn)兩種方法適應度值比較接近,但是傳統(tǒng)的經(jīng)典粒子群算法往往需要更多的計算時間,其收斂速度較低,而自適應離散粒子群算法運行時間快,收斂性能更好,說明該優(yōu)化算法具有較好的尋優(yōu)效果。通過自適應離散粒子群算法和經(jīng)典離散粒子群算法優(yōu)化后,在布設10 個基準點時,其基準 點 編 號 分 別 為5、37、60、75、107、122、140、174、186、191 與5、37、60、75、107、122、140、172、186、191。在布設12 個基準點時,其基準點編號分別為5、37、60、75、84、107、122、128、140、174、186、191 與5、37、60、75、84、107、122、129、140、174、186、191。從結(jié)果來看,自適應離散粒子群算法得到的基準點布局體現(xiàn)出了很好的繼承性,即優(yōu)化后的12 個基準點布局完全包含優(yōu)化后的10 個基準點布局。
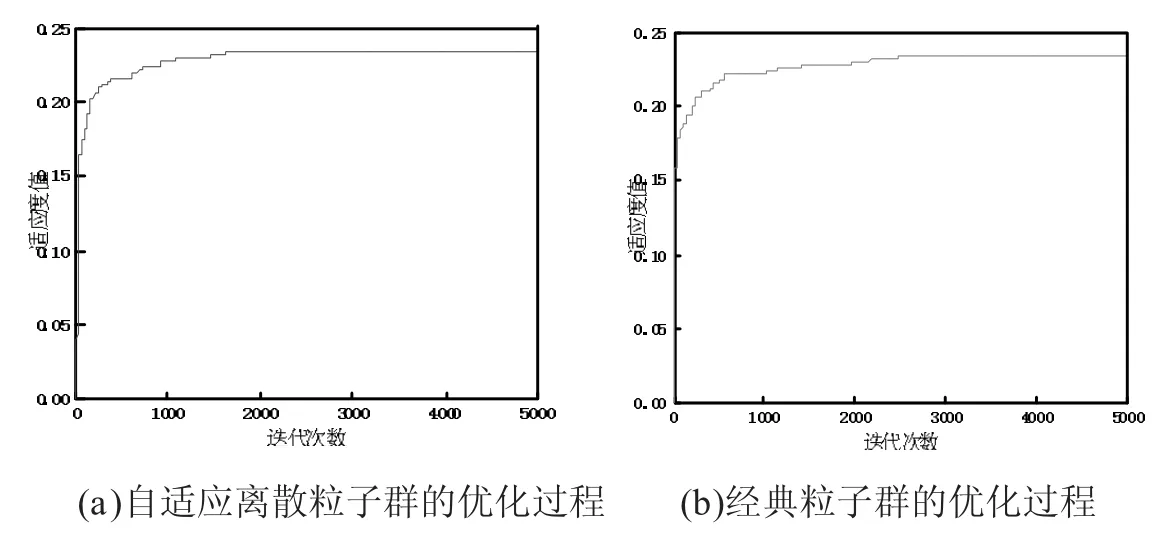
圖5 布設12 個基準點時兩種算法的優(yōu)化效果
4 結(jié)論
機翼的裝配變形通常用調(diào)姿基準點的位置誤差來表示,基準點的不同位置的裝配變形信息也不同。為了獲得更多的變形信息,通過最大化費希爾信息矩陣行列式的值,實現(xiàn)了在機翼上的最優(yōu)基準點位置。為了有效地解決基準點的最優(yōu)布局問題,提出了基于自適應離散粒子群算法的基準點優(yōu)化布局方法,并與基于經(jīng)典離散粒子群算法的基準點優(yōu)化布局方法進行了比較,結(jié)果表明,基于自適應離散粒子群算法的基準點具有更好的尋優(yōu)效果。影響裝配變形的其他因素很多,如裝配車間的環(huán)境溫度、零件的制造誤差、工裝的非標稱位置等。每個因素都會導致不同程度的裝配變形,最終影響整機裝配質(zhì)量。本文僅考慮機翼自身重力引起的變形模式,對基準點的布局進行優(yōu)化,其他影響大部件裝配質(zhì)量的變形因素也值得深入研究。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36