針對低軌衛星移動通信終端的無源定位技術
2022-04-20 07:24:10朱國富
電子設計工程 2022年7期
關鍵詞:信號
朱國富
(中國西南電子技術研究所,四川成都 610036)
隨著衛星移動通信技術的發展,低軌衛星系統越來越受到重視,與靜止軌道衛星相比,低軌衛星移動通信系統的軌道高度低,其發射功率大大降低,具有傳播時延短、路徑損耗低等優點,通過多星組網,可以實現真正意義上的全球覆蓋[1-3]。目前,低軌衛星移動通信系統正在蓬勃發展,并在民用和軍事領域得到了廣泛應用[4-7]。因此,對地面通信終端無源定位的需求也越來越多。低軌衛星移動通信系統地面通信終端定位的常規方法,都是將地面通信終端作為一般的輻射源進行定位,沒有充分利用自身系統的特點。
低軌衛星移動通信系統相對靜止軌道衛星通信系統來說,由于低軌衛星平臺的相對高速運動,在衛星和地面終端之間的發射信號和接收到的信號之間會存在多普勒頻移[8-9]。低軌衛星移動通信系統為了充分利用信道帶寬,同時避免不同位置通信終端發射信號的多普勒頻移造成相鄰信道之間的干擾,采用了“多普勒頻移預補償”的工作方式,即通信終端根據與衛星之間的多普勒頻率預計,對發射信號的頻率進行反方向的多普率頻移預補償,使得衛星平臺接收到的通信終端信號頻率為標稱的分配頻率,從而避免頻率沖突[10-13]。同時,低軌衛星移動通信系統為了充分利用信道資源,統一對信道資源進行動態分配,在地面終端業務申請階段通過網控信號指定通信終端工作頻率[14-16]。
該文提出了一種基于低軌衛星移動通信系統地面通信終端“多普勒頻移預補償機制”的新型定位方法,該方法充分利用低軌衛星移動通信系統體制特點,獲取補償頻率信息,反推地面通信終端與衛星的位置關系,從而實現地面終端的定位。該方法能夠減少定位站的數量,降低地面終端無源定位系統的復雜度。
1 基于“多普勒頻移預補償機制”的地面終端定位方法
1.1 定位原理
定位原理如圖1 所示,定位站通過衛星星歷獲取衛星的地心地固坐標系空間位置(xS,yS,zS),以及速度向量(vx,vy,vz),接收、處理下行信號,解析網控信號,獲取通信終端臨時身份識別碼及通信頻率分配信息,通過頻率映射表,得到分配給通信終端的通信發射工作頻率fA。
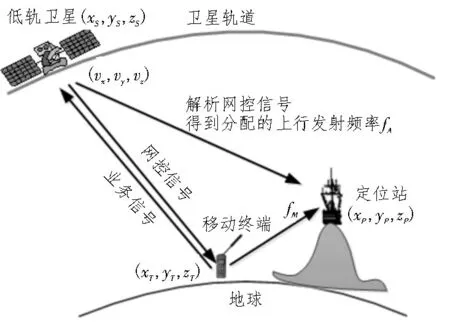
圖1 定位原理示意圖
定位站接收、處理通信終端上行信號并進行信號頻率測量,獲得通信終端實際發射頻率fM。
根據通信終端通信發射工作頻率fA和通信終端實際發射頻率fM進行多普勒頻移估計,通過通信終端補償機制,獲得通信終端相對衛星的多普勒頻移fd=fA-fM。
根據地心地固坐標系的空間位置坐標(xS,yS,zS)、速度向量坐標(vx,vy,vz)和通信終端通信發射工作頻率fA,計算滿足衛星多普勒頻移fd與地面終端位置(xT,yT,zT)的分布曲線:
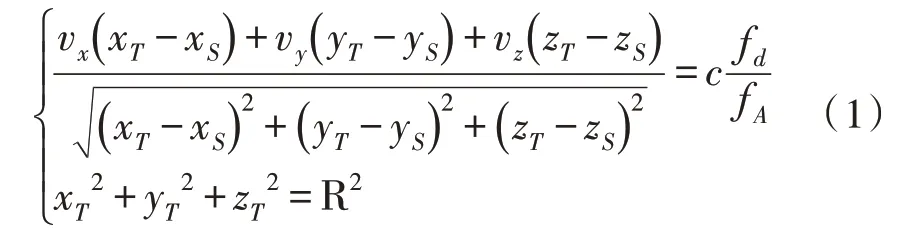
式中,c為光速,R 為地球半徑。
同時,接收通信終端上行信號,對通信終端發射信號進行干涉儀無源測向,獲得通信終端相對于定位站(xP,yP,zP)的方位角θ和俯仰角φ的坐標(θ,φ)。
利用干涉儀測向獲得的通信終端相對定位站(xP,yP,zP)的方位信息示向線,結合滿足衛星多普勒頻移fd與地面終端位置(xT,yT,zT)的分布曲線,可得如下方程:
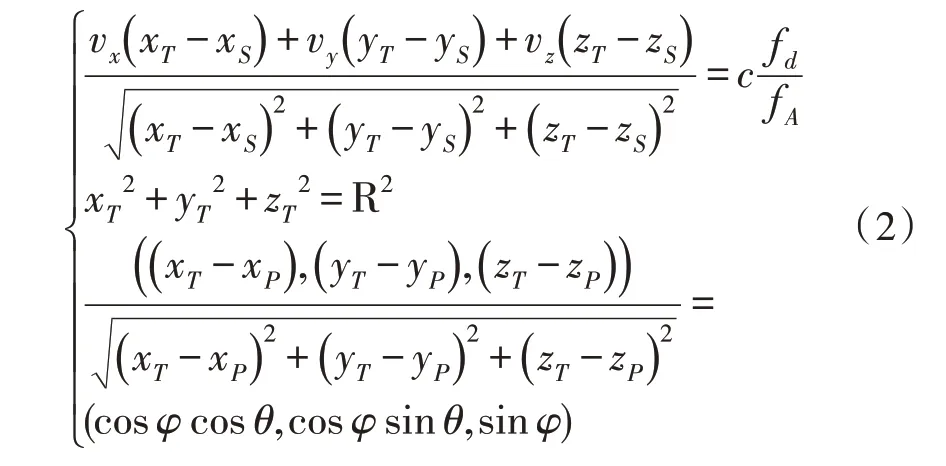
通過上述方程進行定位解算,求出通信終端位置,從而得到通信地面終端無源定位結果。
1.2 系統設計
基于地面通信終端“多普勒頻移預補償機制”的定位系統如圖2 所示,系統包含星歷預測模塊、頻率信息提取模塊、信號頻率測量模塊、干涉儀測向模塊、多普勒頻移估計模塊、基于多普勒頻移的目標位置分布曲線計算模塊和定位解算模塊。
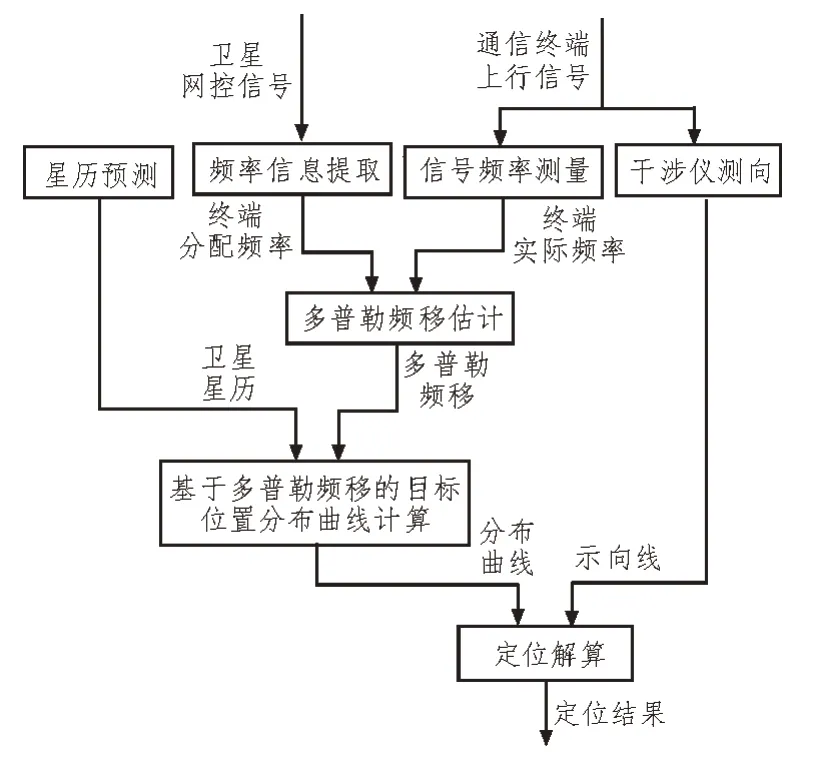
圖2 定位系統組成框圖
系統定位解算的處理流程如下:
1)星歷預測模塊實時獲取衛星廣播的星歷信號,獲得衛星位置信息和速度向量;
2)頻率信息提取模塊接收衛星下行網控信號,利用非協同信號處理以及協議分析方法,實時獲取給通信終端分配的通信頻率;
3)信號頻率測量模塊接收通信終端上行信號,測量獲取通信終端發射信號的實際頻率;
4)頻率信息提取模塊與信號頻率測量模塊同時將上述獲取的分配通信頻率和實際頻率送入多普勒頻移估計模塊;
5)多普勒頻移估計模塊利用實際頻率與分配頻率的差來估計獲得的通信終端相對衛星的多普勒頻移;
6)目標位置分布曲線計算模塊基于多普勒頻移估計模塊估計獲得的多普勒頻移,根據星歷預測模塊傳送來的衛星星歷,進行滿足多普勒頻移條件的目標位置分布曲線計算,將解算出的通信終端可能位置分布曲線送入定位解算模塊;
7)定位解算模塊利用通信終端相對定位站的方位信息示向線和通信終端位置分布曲線,求解通信終端位置,得到通信地面終端無源定位結果。
1.3 應用場景
該定位系統可應用于旋翼無人機、艦船、塔站等慢速運動或固定平臺,通過對地面移動終端上行信號進行測頻及測向,同時對終端下行網控信號進行解析,得出分配給終端的上行發射頻率,結合多普勒頻移估計及測向結果進行定位解算,得出目標無源定位結果。系統的應用場景如圖3 所示。
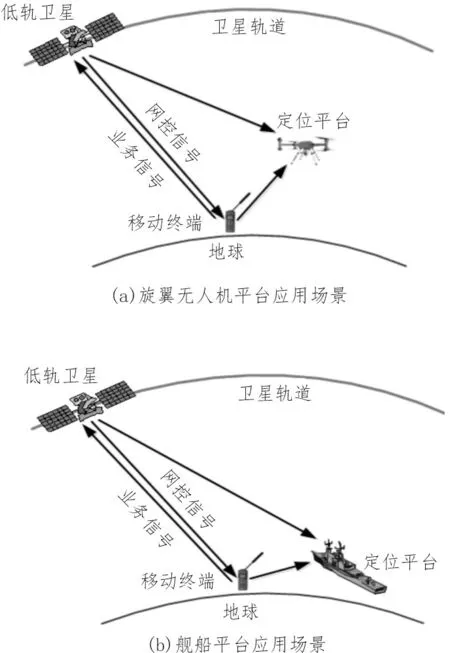
圖3 定位系統的應用場景示意圖
2 仿真實驗及分析
在針對低軌衛星移動通信地面終端的無源定位仿真實驗環境中,設置測向定位站點與目標距離約為400 km,衛星參考銥星系統,參數設置:衛星高度為785 km,衛星移動速度為7.46 km/s,通信頻率為1.6 GHz。
根據衛星參數設置,衛星速度方向矢量分別設置為[0 0 1]、[0 1 1]和[1 0 1],其頻移分布曲線分別如圖4~6 所示。可以看出,不同方向的速度矢量是影響頻移分布曲線的主要因素。因此,在選擇定位站位置時,需要考慮衛星的運動方向,使得定位站與移動終端的測向方向與其盡量正交,以使系統誤差導致的定位誤差范圍最小。
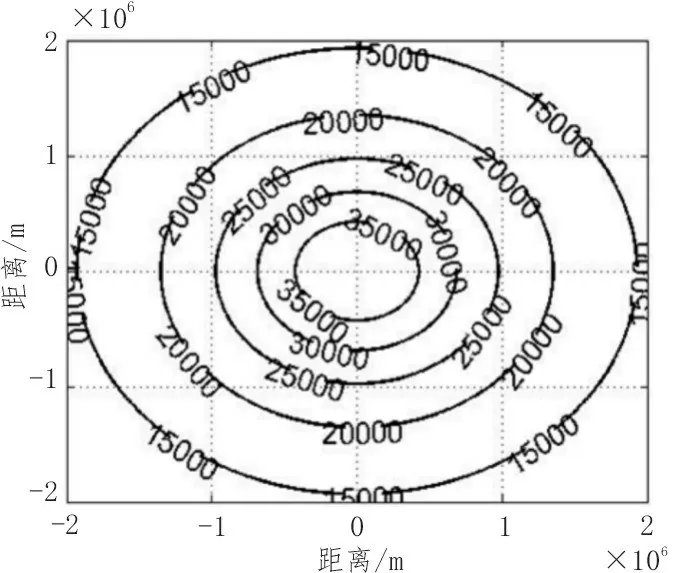
圖4 速度矢量[0 0 1]條件下的頻移分布
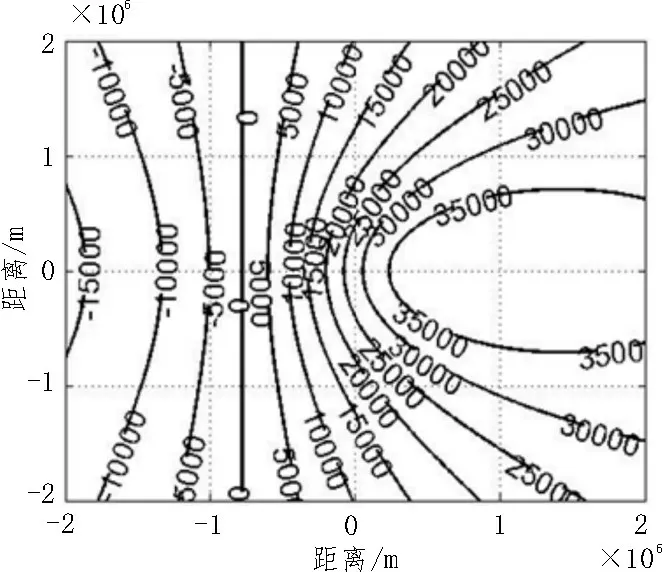
圖5 速度矢量[0 1 1]條件下的頻移分布
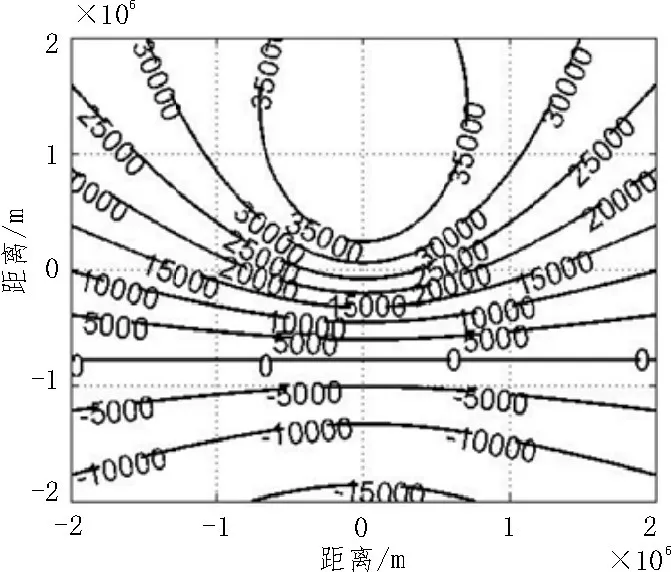
圖6 速度矢量[1 0 1]條件下的頻移分布
當設定衛星速度矢量為[1 1 1]時,測向定位的仿真結果如圖7 所示,參數設定位站的測頻誤差為100 Hz,測向誤差為1°。
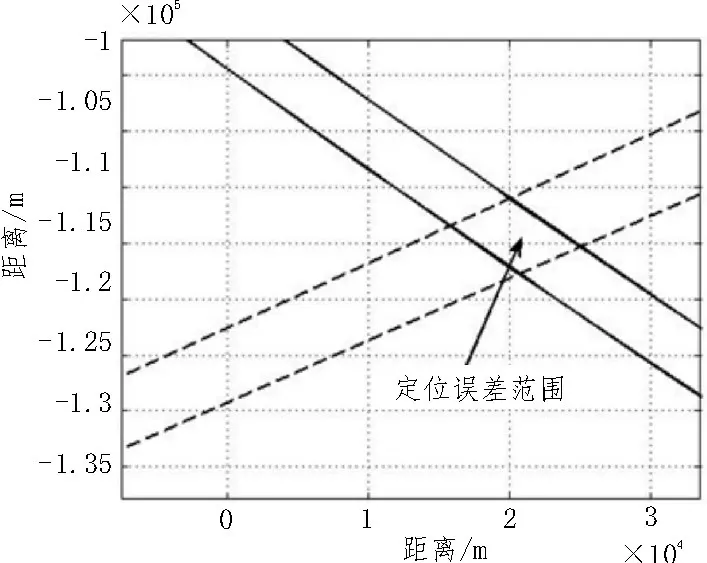
圖7 定位仿真
根據圖7 可以看出,在定位站與通信終端的距離約為400 km,測頻誤差為100 Hz,測向誤差為1°的條件下,定位誤差范圍約為4 km×6 km 的帶狀區域。
當測頻誤差為1 kHz,測向誤差為1°時,對應的定位仿真結果如圖8 所示。
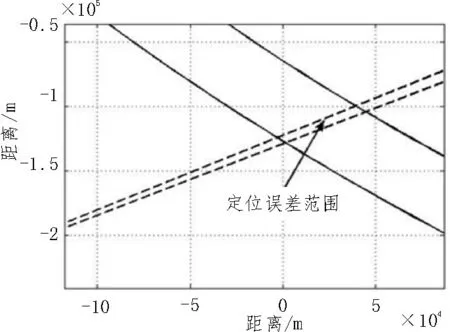
圖8 定位結果
從圖8 看出,在測頻誤差為1 kHz,測向誤差為1°的條件下,定位誤差范圍約為4 km×48 km 的長條型帶狀區域。
當測頻誤差為1 kHz,測向誤差為2°時,對應的定位仿真結果如圖9 所示。
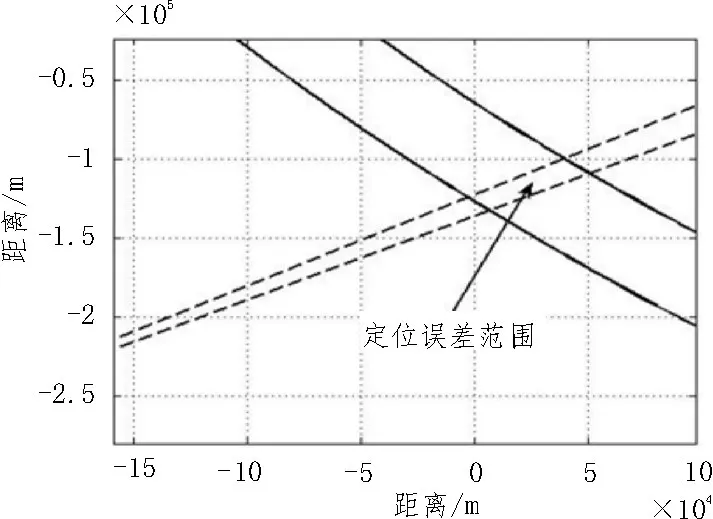
圖9 定位結果
從圖9 看出,在測頻誤差為1 kHz,測向誤差為2°的條件下,定位誤差范圍近似8 km×51 km 的塊狀區域。
根據仿真結果可以看出,在測向誤差固定的情況下,影響定位精度的主要因素是測頻誤差,而在固定測頻誤差的情況下,影響定位精度的主要因素是測向誤差。在當前定位系統中,測向精度基本能保證在1°的情況下,測頻誤差是影響定位精度的主要因素。
3 結論
該文針對低軌衛星移動通信地面終端的無源定位問題,利用低軌衛星通信系統通過網控信號指定通信終端工作頻率、通信終端對發射信號頻率進行反方向多普勒頻移預補償這一特點,通過獲取補償頻率信息,反推地面通信終端與衛星的位置關系而定位。相比以往雙星或雙機時頻差定位方法,減少了定位站的數量,降低了系統復雜度,相比單星或單機平臺多次測向交匯的方法縮短了定位時間。
仿真實驗表明,這種定位方法在定位站與通信終端距離約為400 km,測頻誤差為100 Hz,測向誤差為1°的條件下,能將定位誤差范圍限定在24 km2的區域范圍內。目前系統中定位精度的主要影響因素是測頻誤差。另外應盡量考慮定位站的位置,使得通信終端的測向方向與衛星速度方向盡量正交,降低衛星速度方向對定位精度的影響。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
