雙體清污船綜合減搖自適應控制方法
2022-04-20 07:23:56殷秋雯羅春艷
電子設計工程 2022年7期
殷秋雯,羅春艷,孫 惠
(1.吉林農業科技學院機械與土木工程學院,吉林吉林 132101;2.吉林省航道管理局,吉林吉林 132013)
雙體清污船的耐波性較好,航行速度較快,但在惡劣的海洋航行環境下,雙體清污船會發生劇烈搖晃[1-2],這極大地影響了雙體清污船上清污設備的正常運行[3]。為了實現對雙體清污船的減搖控制,有些學者提出了基于分數階自適應滑模的雙體清污船減搖控制方法[4],通過測量雙體清污船橫搖運動的頻率數據,采用分數階自適應滑模建立雙體清污船減搖控制模型,以此實現對雙體清污船的減搖控制。但該方法的修正誤差較大,不能對雙體清污船航行的穩定性進行控制。
綜上所述,該文在綜合使用減搖鰭和減搖水艙的條件下,提出了雙體清污船綜合減搖自適應控制方法。
1 雙體清污船舵鰭聯合自適應控制
雙體清污船具有耐波性高、航速快等優點,能夠有效提高水面清污效率。但是船舶運動屬于復雜的非線性運動,在航行中雙體清污船不可避免地要面對垂蕩、升沉、縱搖等運動,因此尋求有效的減搖控制方法,使船舶平穩航行,保證運動過程的安全性,是現在船舶控制的熱點研究問題之一。對雙體清污船的綜合減搖進行研究,提高自適應控制能力,保證作業過程中的安全性,同時提高工作效率[5-6]。
根據參數分析,對鰭型和鰭容量進行設計,通過在船舶上安裝減搖鰭達到對船舶減搖的目的[7-8]。但是,減搖鰭的安裝會影響船舶的橫蕩和艏搖,且會增加船舶成本,在應用上存在一定限制。
操舵會使船舶產生一個橫傾力矩,與減搖鰭相比,舵減搖設備成本較低,維修方便,且不會占據過多的船內空間[9-10]。進行舵減搖控制時對船舶參數敏感度要求較高,導致減搖控制難度高。隨著計算機技術的迅速發展,舵減搖自適應控制系統已經能夠達到自適應效果,但算法較為復雜,對操控器有較高要求,還需充分考慮其魯棒性問題,在應用時限制條件較多。船體減搖受到的混合力矩如圖1 所示。
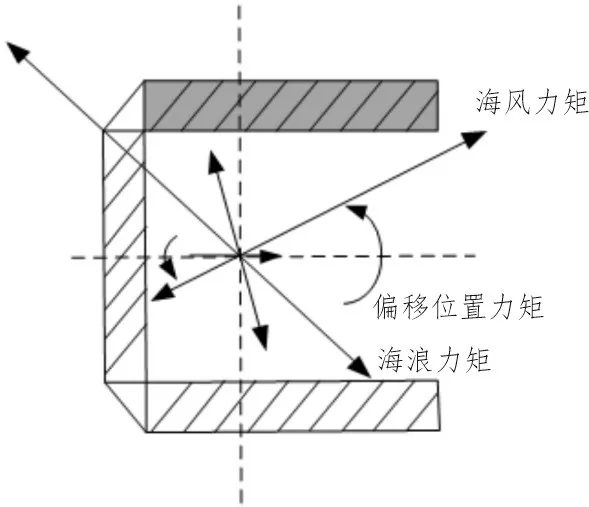
圖1 船體減搖受到的混合力矩
船舶運動本質上是一個強耦合非線性運動,減搖鰭能夠減小橫搖幅度,獨立設計使用時需要較大的鰭容量,與此同時也會產生艏搖,為克服艏搖,需要采用舵調節輔助方法。
綜合考慮,舵鰭聯合控制裝置能夠有效結合自由舵和減搖鰭的優點,對船舶綜合減搖更具有現實意義,該文采用舵鰭聯合控制裝置實現對雙體清污船綜合減搖自適應控制[11]。聯合控制器主要由傳感器、舵機、鰭機和控制器等部分構成,利用船舶運動本身的六自由度耦合特性,將舵角和鰭角作為可用的控制量,將船舶的艏搖、橫搖和橫蕩作為輸出量,借助于舵鰭對振搖的耦合作用達到船舶減搖的控制[12]。
當受到海浪橫搖干擾時,其橫搖力和橫搖角會通過傳感器傳遞至控制器,控制器如同人體大腦一般作出判斷,將命令傳遞至鰭機,減搖鰭作出反應,通過調節鰭角完成船舶減搖。當海浪帶來艏搖干擾,艏搖力與艏搖角亦會通過傳感器反饋給控制器,控制器對舵機下達命令,調整舵角以達到減搖的目的,保證船舶的平穩安全運行。傳感器為硅壓力傳感器具有智能化、系統化和微型化的特點,采集到的信號穩定性強,不易受外界環境影響,數據時效性和可靠性強。該文采用的控制器為MFAC 控制器,該控制器具有較高的自適應控制能力,能夠根據實時測量數據,完成橫搖強度的判斷并進行減搖參數的自主調試[13-14]。
2 雙體清污船綜合減搖自適應控制模型
船舶減搖系統具有時變性、高度非線性和強耦合復雜性的特點,須同時關注系統測量的實時數據和系統數據模型[15-16]。
雙體清污船帶有T 型翼,會受到攻角變化率、船舶狀態、翼攻角幅值的約束,在模型設計時,應充分考慮船舶特征。雙體船在航行時,T 型翼產生的升力不與軸向平行,且遠大于其阻力,因此阻力及其力矩可以忽略,升力計算如下:

其中,FT為T 型翼產生的升力;C為升力系數;ρt為水艙內液體密度;S為翼型面積。
綜合減搖結構如圖2 所示。
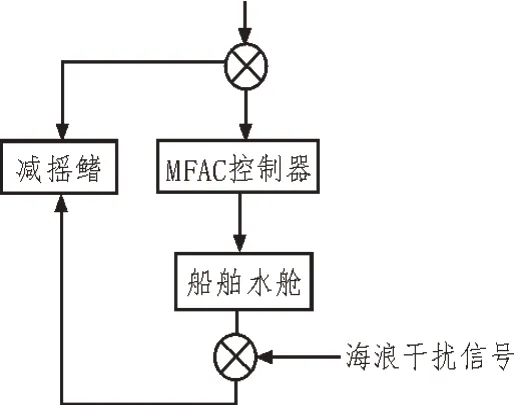
圖2 綜合減搖結構
外力作用會對雙體清污船產生干擾力和干擾力矩,其中外力包括海浪、海風以及控制力的干擾,使雙體清污船進行六自由度運動。六自由度運動示意圖如圖3 所示。
圖3 中,Surge、Sway、Heave 分別表示船體平移運動的縱蕩、橫蕩與垂蕩,Roll、Pitch、Yaw 分別表示船體轉動的橫搖、縱搖和艏搖。
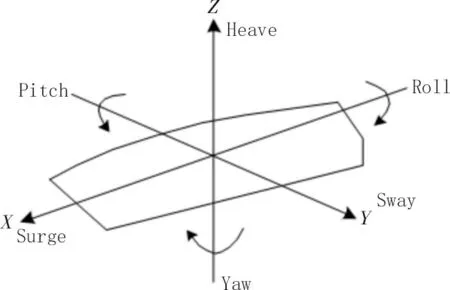
圖3 六自由度運動示意圖
將船體看作一個剛體,根據剛體動量矩定理和動力定量,建立船體運動模型,“船舶-舵機-鰭機”系統的橫搖方程如下:

其中,x、y和z分別為艏搖角、橫搖角和橫蕩角;Nt表示水艙在橫搖過程中產生的阻尼;s0表示邊側液艙中液體的表面積;R表示從邊艙位置到船舶位置剖面的水平距離;λ表示船艙各個軸線之間的距離;h表示船舶重心位置;D表示船舶控制過程中產生的排水量;I1表示清理船舶過程中船舶轉動產生的轉動慣量;Jt表示艙內清理過程中船舶轉動產生的轉動慣量;KW表示由于海浪干擾而產生的力矩;KF表示船舶在穩定行駛過程中的力矩。
在“船舶-舵機-鰭機”系統的橫搖方程約束下,分析雙體清污船的運動特性,得到船體運動方程為:

其中,η表示清污船的總位移,υ表示清污船的移動速度,M表示移動慣性矩陣,J表示動力耦合矩陣,C表示航行負荷矩陣,L表示阻尼矩陣,g重力系數向量,τ表示作用在船體上的外力。
控制器CPU 能夠根據輸入信息產生與海浪干擾信號相對抗的控制信號,通過舵機和鰭機執行機構,產生等效波傾角用于抵消海浪傾角,使系統輸出盡可能接近設定值,基于輸入參數和實時數據進行離散化處理,建立空間模型完成系統的自適應控制。
3 實驗研究
為了驗證該文提出的雙體清污船綜合減搖自適應控制方法的使用效果,將基于分數階自適應滑模的雙體清污船減搖控制方法與該文所提方法進行對比實驗。實驗中,模擬的雙體清污船海上航行條件為浪高1 m、雙體清污船的航行速度為1 km/h,遭遇角為90°。雙體清污船的相關實驗參數:船長210.25 m,船寬30.55 m,吃水3.5 m,排水量19 000.25 t,重心高10.256 m,初穩心高3.8 m,固有周期14.30 m,晃動慣量0.95×103kg/m2。為了保證實驗結果的有效性和嚴謹性,采用基于分數階自適應滑模的雙體清污船減搖控制方法和該文提出的雙體清污船綜合減搖自適應控制方法分別進行雙體清污船減搖控制實驗。兩種控制方法的角度修正誤差對比結果如圖4 所示。

圖4 兩種控制方法的角度修正誤差對比結果
通過對實驗結果進行分析可知,在雙體清污船所受外界環境相同的條件下,當雙體清污船航行速度相同,隨著航行時間的不斷增加,基于分數階自適應滑模的雙體清污船減搖控制方法的修正誤差較大,而該文提出的雙體清污船綜合減搖自適應控制方法的修正誤差較小。
綜上,該文提出的雙體清污船綜合減搖自適應控制方法的誤差修正能力高于基于分數階自適應滑模的雙體清污船減搖控制方法,該文所提方法能夠滿足雙體清污船的不同減搖要求。
基于以上兩種方法的修正誤差對比結果,針對不同方法對雙體清污船的減搖程度進行對比實驗。兩種方法的減搖鰭船舶搖擺曲線對比實驗結果如圖5 所示。
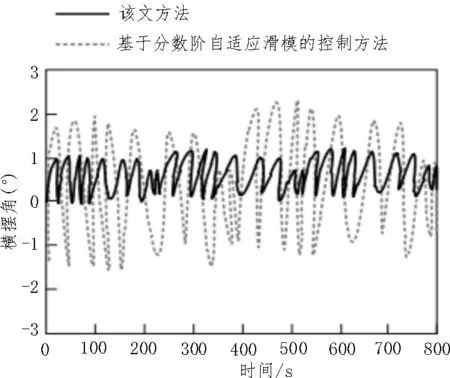
圖5 減搖鰭船舶搖擺曲線對比實驗結果
兩種方法的減搖水艙船舶搖擺曲線對比實驗結果如圖6 所示。

圖6 減搖水艙船舶搖擺曲線對比實驗結果
兩種方法的船舶綜合搖擺曲線對比實驗結果如圖7 所示。
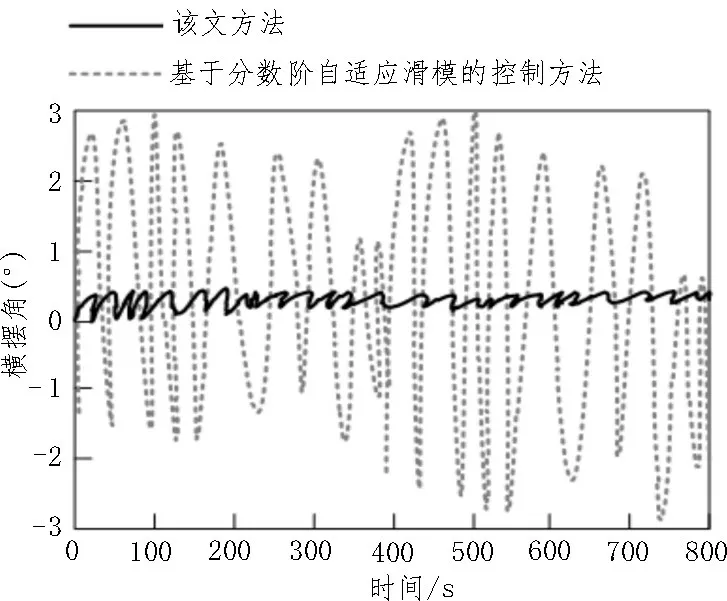
圖7 船舶綜合搖擺曲線對比實驗結果
由實驗結果可知,在該文提出的雙體清污船綜合減搖自適應控制方法控制下的雙體清污船,其船體橫擺運動的角度為-1°~2°之間,在雙體清污船遇到惡劣海況快速航行時,雙體清污船的橫擺角度有小幅度的增加,在采用該文提出的雙體清污船綜合減搖自適應控制方法后,雙體清污船的橫搖運動減弱,雙體清污船的穩定性較好。基于分數階自適應滑模的雙體清污船減搖控制方法下,雙體清污船橫搖運動的角度較大。由此可見,該文提出的雙體清污船綜合自適應減搖控制方法的橫擺角低于基于分數階自適應滑模的雙體清污船減搖控制方法,該文控制方法可以更好地保證雙體清污船的穩定性,魯棒性較高。
根據不同控制方法下的雙體清污船修正誤差以及橫擺角控制的實驗結果可知,當雙體清污船的減搖率相同時,在該文提出的雙體清污船綜合減搖自適應控制方法的控制下,雙體清污船的角度修正誤差較低,而在基于分數階自適應滑模的雙體清污船減搖控制方法的控制下,雙體清污船的角度修正誤差較高,說明該文方法能夠更加有效地降低角度修正誤差,并降低橫擺角的幅度。
綜上所述,該文提出的雙體清污船綜合減搖自適應控制方法優于基于分數階自適應滑模的雙體清污船減搖控制方法,該文控制方法的誤差修正能力較好、橫擺角較小。
4 結束語
隨著經濟社會的發展和人文活動的增加,不少生活廢棄物進入到河流中,對湖泊和河流造成嚴重污染,急需高效的水面清污船進行清污處理。搖蕩運動會對船只的安全性、適航性、船體設備與船員的正常工作造成很大影響。為保證清污船安全作業的同時,提高其自適應控制,使其在無人工參與的情況下實現高效順利作業,該文研究雙體清污船綜合減震自適應控制方法。針對船舶橫搖運動的不確定性,將自適應控制方法引入到雙體清污船綜合減搖系統中,采用舵鰭聯合控制裝置,滿足設計要求,保證船舶清污工作高效安全完成,具有較高的應用前景。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
