可視化靶彈供靶任務規劃系統研究
2022-04-20 11:25:32張芝源曹紅松劉鵬飛曹立飛常海郝晶勝
火炮發射與控制學報 2022年2期
關鍵詞:規劃
張芝源,曹紅松,劉鵬飛,曹立飛,常海,郝晶勝
(1.中北大學 機電工程學院,山西 太原 030051;2.陸軍炮兵防空兵學院鄭州校區,河南 鄭州 450000;3.中國人民解放軍第3606工廠,山西 侯馬 043000)
為了有效衡量防空武器攔截能力,在其演習訓練及相關性能試驗中需要大量成本低、性能可靠和操作簡便的靶彈[1]。目前,通過改造退役或者超期火箭彈,模擬制導導彈紅外、雷達等特性,能夠滿足廣泛的供靶要求[2-3]。但是對不同的訓練及試驗需求,供靶彈道、航路捷徑以及目標特性的模擬要求不同,并且不同的靶場具有不同的地理條件和射界要求,依據人工規劃靶彈發射任務的方法,經常出現靶彈發射位置設置不合理,射角、射向不精確等問題,使靶彈脫離供靶段導致供靶失敗,且存在靶彈落點區域不精確帶來的安全風險等問題。
針對以上問題,筆者設計了一套集便攜式手持設備、車載衛星定位定向、風速風向儀于一體的靶彈供靶任務規劃系統,可實時獲取GPS定位、氣象信息,能夠對靶彈彈道及射表進行精準計算和合理規劃,并以靶彈彈道為基礎,實時實地地計算靶彈發射位置、方位角和射角等參數。系統采用OSMDroid作為GIS地圖引擎并基于地圖精確標識靶彈發射的火炮、導彈陣地、導彈路徑、供靶段等重要信息,實現對導彈靶彈發射位置以及落點、供靶段等任務規劃預案的可視化。
通過該任務規劃系統,在軍事訓練、導彈測試試驗準備過程中,保障訓練和試驗人員可以快速便捷地規劃供靶任務,依據當前訓練靶場地理環境確定最優靶彈發射陣地及方位等,能夠有效減少試驗前期準備時間,提高供靶效率和著靶概率,更好地滿足防空武器性能測試及訓練需求。
1 系統方案設計
1.1 需求分析
本系統為滿足訓練和試驗人員在不同的靶場地理環境中,針對不同類型靶彈與防空武器進行協同訓練時的任務規劃需求,應具有以下功能:
1)可選擇不同類型的靶彈,在不同飛行高度、飛行速度、供靶時間等供靶參數要求下,進行單條供靶彈道的計算。
2)能對訓練場地基本氣象數據進行測量,并針對不同海拔、風速風向等要求進行多任務的彈道射表計算,并進行射角的優選。
3)對于供靶任務的總體規劃,有較為便捷的設計方法和清晰的展示效果。能對導彈、靶彈發射位置以及發射方位進行設計,方便訓練和試驗人員根據地形確定最佳發射位置、選擇目標攔截方式,如迎攻、尾追等。
4)確定方案后可計算獲取靶彈彈道關鍵點、導彈發射點、航路捷徑、靶彈落區以及安全區域的相關數據,并生成規劃報告。
5)可對靶彈發射架上定位定向裝置的數據進行讀取與處理,并進行實際方位與任務規劃結果的校準。
1.2 硬件系統設計
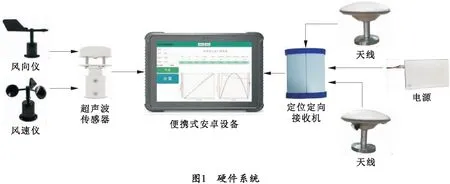
為了滿足以上需求,獲取精確的作戰環境參數,保障系統軟件穩定運行,便攜式靶彈可視化系統硬件主要由以下幾個部分組成,如圖1所示。
1)便攜式安卓設備:系統工作、通訊和軟件運行都以該設備作為核心模塊,采用10.1英寸軍用三防平板,通過設備上RS-232串口、USB接口與定位定向設備和氣象測量儀進行通信;同時搭載高性能處理器為靶彈彈道及射表實時解算提供保障。
2)定位定向設備:主要負責高速靶彈射向、射角以及發射位置的確定及讀取,采用便攜式高精度定位定向接收機,具備載波相位差分(RTK)、偽距差分以及GPS短報文通信和位置報告等功能;使用時通過測量兩個定向天線構成的基線矢量方位角,可以快速、準確地測算出相位角。同時可進行多模多頻衛星信號處理,實現高速靶彈方位角、俯仰角及發射點坐標的快速精確解算[4]。
3)供電設備:作為接收機電源,信號接口均采用LEMO接頭,可在惡劣使用環境下可靠連接。
4)氣象測量儀:進行訓練場地氣象數據采集,并將數據傳輸到數據解析模塊生成靶彈彈道計算所需的氣象數據。可測量訓練場地的氣溫、氣壓、瞬時風速、瞬時風級、平均風速、平均風級和對應浪高等數據。
1.3 軟件系統設計
針對實際防空武器訓練任務過程中涉及的環節因素多樣,對軟件進行了總體架構設計,制定了規劃、計算、分析與查看的流程。
1.3.1 軟件總體架構
筆者將系統軟件劃分為用戶層、應用層和數據層,軟件總體架構如圖2所示。
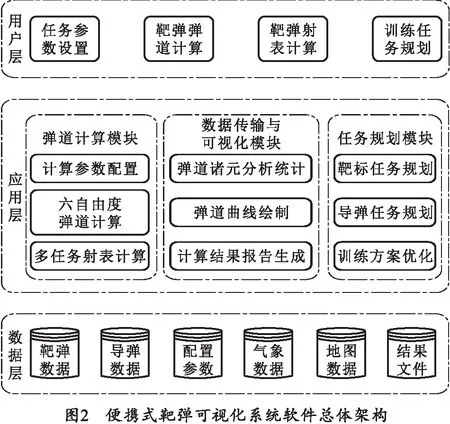
用戶層是系統與用戶進行交互操作的前端界面,實現用戶在Android設備上的各種內容的交互,完成彈道解算以及彈道數據的分析、靶彈任務的規劃及展示、地圖要素信息的獲取。
應用層負責軟件后臺數據解析與計算,主要包含彈道計算、數據獲取和可視化任務規劃3個模塊,是規劃軟件的核心內容。將數據層得到的地圖資源、彈道數據和訓練、試驗人員通過用戶層設計的任務規劃數據進行分析解析。
數據層負責系統軟硬件產生的包括靶彈數據、導彈數據、配置參數、氣象數據、地圖數據和結果文件等數據在內的交換、存儲和分發。
1.3.2 軟件功能設計
根據總體需求與設計要求,按照實際訓練操作流程,本系統提供了一套試驗前的靶場陣地規劃軟件流程,設計計算合理優質的供靶彈道,定位靶彈發射陣地位置、防空武器發射位置以及安全區域,在不同的靶場中對靶彈的射角、射向進行分析計算。
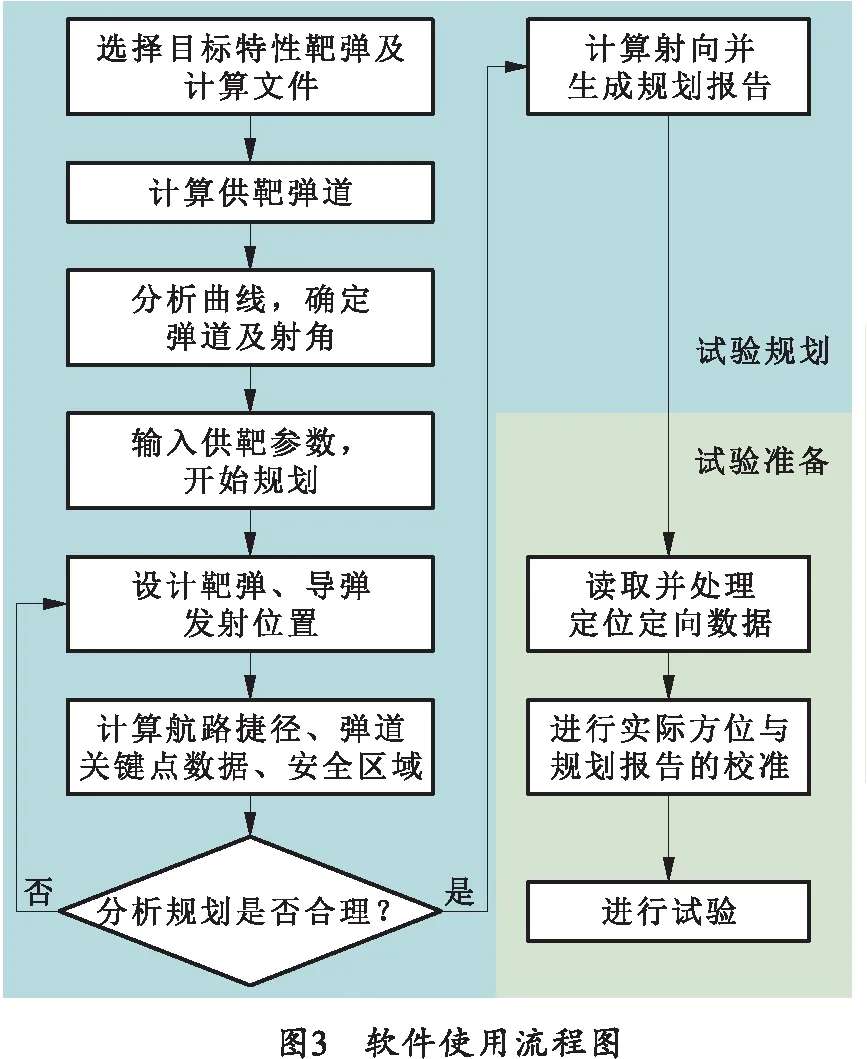
軟件按使用時間分為試驗前的總體規劃、試驗供靶前夕的調試和準備兩個部分。軟件使用流程設計圖如圖3所示。
2 基于地理信息的靶場陣地規劃
2.1 地理信息的處理與加載
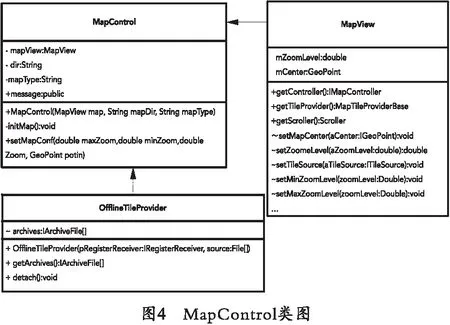
本軟件基于OSMDroid引擎[5-6],首先在安卓設備中預置存儲所需靶場的離線瓦片地圖數據。然后集成OSMDroid中核心功能,定義了MapControl類、實現了對地圖初始化的封裝,Unified Modeling Language(UML)類圖如圖4所示。
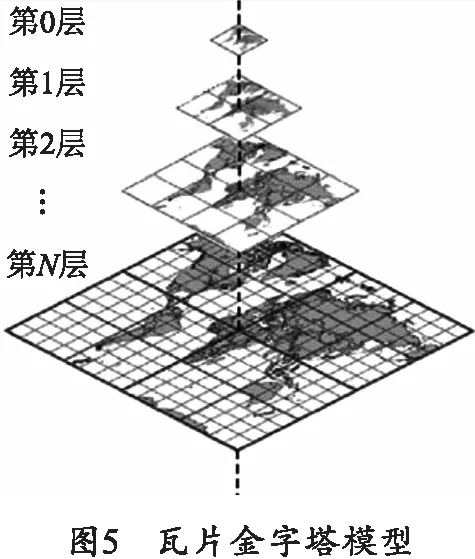
采用了瓦片金字塔模型,按照地理實體類別與屬性特征進行分層顯示,每一圖層依據分辨率級別匹配對應參數,如圖5所示。移動GIS地圖數據模式采用網格式布置,圖層數據在同一顯示級別中以網格形式存在,網格中的每一塊與地理實體數據單元一一對應,每一個數據單元按分辨系數進行數據組織,以此實現地圖數據的應用功能和多級表達[7],結果如圖6所示。

2.2 靶場陣地規劃
本系統的使用流程是根據陣地規劃的實際內容設計的,所以規劃過程可參考圖3的流程:
1)試驗前,在諸多不同類型靶彈計算文件選擇具有目標特性的靶彈和相應的靶彈計算文件,然后在彈道計算模塊進行多條供靶彈道的計算。
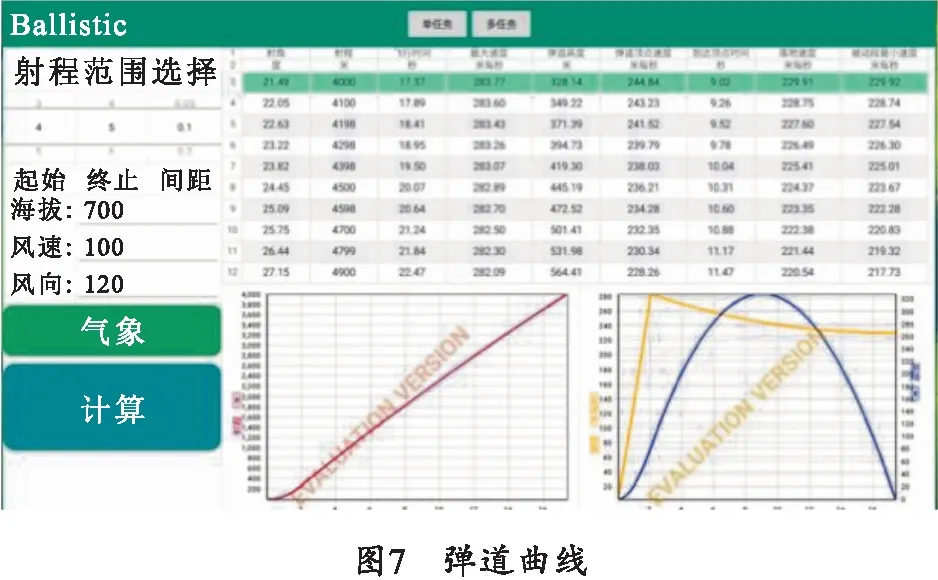
2)根據生成的彈道曲線,分析是否有較為合理的供靶段,確定靶彈射角及彈道曲線,彈道計算界面和彈道曲線如圖7所示。
3)在任務規劃模塊輸入供靶參數要求和彈道規劃參數,開始規劃。
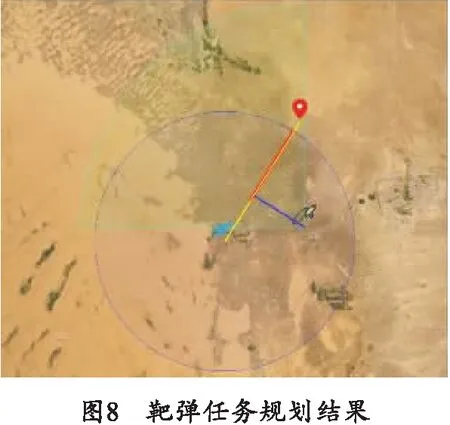
4)針對靶場地理環境、靶場試驗要求、攻擊方式(迎攻或尾追)對導彈射界和位置、靶彈發射位置及射向范圍、安全區域等進行設計與處理,如圖8所示的軟件截圖為靶彈任務規劃結果。
5)分析航路捷徑、彈道關鍵點數據、安全區域是否合理,并與導彈測試人員進行溝通交流。
6)合理后,在靶彈射向范圍內訓練和試驗人員確定最終射向,并生成規劃報告,包括規劃位置、方向、彈道關鍵點數據等規劃內容。
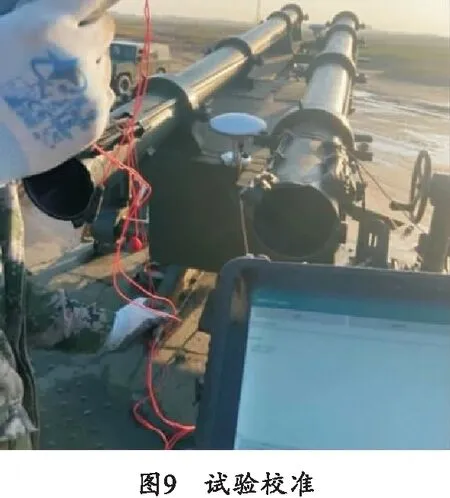
7)試驗時,對風速風向儀、靶彈發射架上定位定向裝置的數據進行讀取與處理,調整位置、射向、射角,進行實際方位與任務規劃報告的校準,實際情況如圖9所示。
2.3 信息要素的圖形化顯示
在本系統中使用了地圖引擎中的Marker類以及其方法進行圖層繪制。地圖符號不僅可以使用Drawable類內部矢量圖、繪制工具進行繪制,也可以通過繼承Drawable類通過其自帶方法使用自定義的地圖符號、標記[8],其具體標記參照圖10所示。

1)靶彈發射陣地如圖8中藍色火炮圖標所示,點擊圖標后會顯示詳細火炮位置、射角(完成彈道設計后顯示)、射向(完成任務規劃后顯示),還有以該型靶彈在35°射角下最大射程為半徑的半透明藍色圓圈,點擊后會顯示射程,如圖10(a)所示。
2)導彈發射陣地如圖8中小火箭圖標所示,導彈射界為淺綠色扇形區域(此次規劃射界為北偏東270°~360°,30 km),點擊導彈圖標后會顯示詳細導彈發射陣地經緯度位置、航路捷徑(垂直于射向的細紅線為航路捷徑)及距離信息(如航路捷徑長度8 km),如圖10(b)所示。
3)靶彈彈道如圖8中的黃線所示,藍色圈內部分表示靶彈彈道。射向上的紅色粗線代表有效供靶段的范圍,單擊紅色位置圖標,顯示供靶起始時間、結束時間、持續時間,如圖10(c)所示。
4)安全區域如圖8中紅色區域所示,點擊后顯示安全區域關鍵位置經緯度,以便與靶場單位人員協調規劃警戒位置,如圖10(c)所示。
3 基于Android的彈道計算與數據讀取
彈道計算作為任務規劃系統的核心模塊,進行靶彈彈道解算及優化求解,得到最佳供靶彈道和發射參數,是本系統規劃的彈道數據來源[9]。數據通信及讀取解析是實際試驗與任務規劃的溝通橋梁,通過實時數據獲取并通過規劃內容來進行試驗。
3.1 彈道的解算流程
靶彈彈道及射表計算由計算參數配置模塊、六自由度彈道計算模塊和多任務射表計算模塊3個部分組成,實現靶彈彈道解算、靶彈射表快速計算等功能。
靶彈射表計算一般是通過射角計算彈道數據,但是在任務規劃當中更多的情況是通過射程等信息反算彈道以及射角,由于反求過程需大量迭代運算,在進行靶彈射表計算時運算量過大,需等待時間較長。所以筆者建立了射程和射角的非線性回歸方程,然后求解給定射程區間內的射角,流程如圖11所示。
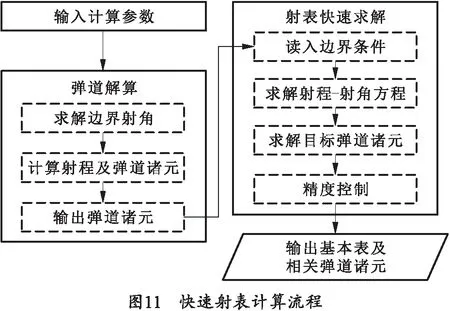
具體解算步驟如下:
步驟1在給定射程范圍內選取3個及以上樣值進行射角計算,一般選取射程范圍上界、下界及平均值這3個點作為樣值。
步驟2分別求解出射程樣值對應的射角組成特征點,根據步驟1選取的樣值可求解得到3組特征點。
步驟3將3組特征點帶入射程和射角回歸方程:
y=ax2+bx-c.
(1)
采用最小二乘法計算回歸系數,求得回歸方程。
步驟4將射表中需求解的其他射程帶入步驟3所得回歸方程,便可快速求解出所需射程對應的射角,將射角帶入彈道方程即可求解出彈道諸元。
如表1所示,快速計算求解得到的射角對應的射程與六自由度彈道求解得到的射程偏差控制在2 m內,滿足供靶需求,同時提高了解算速度,結果可用性較高。
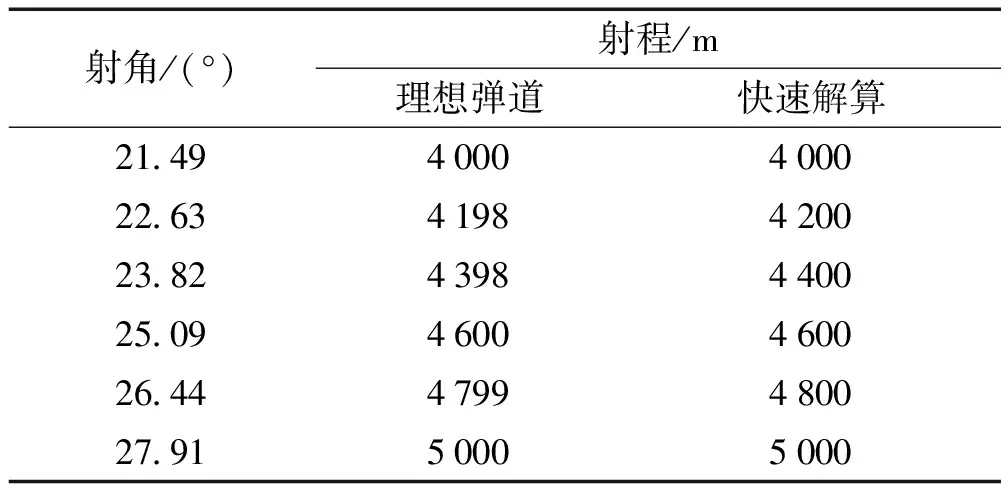
表1 理想彈道與快速計算結果對比
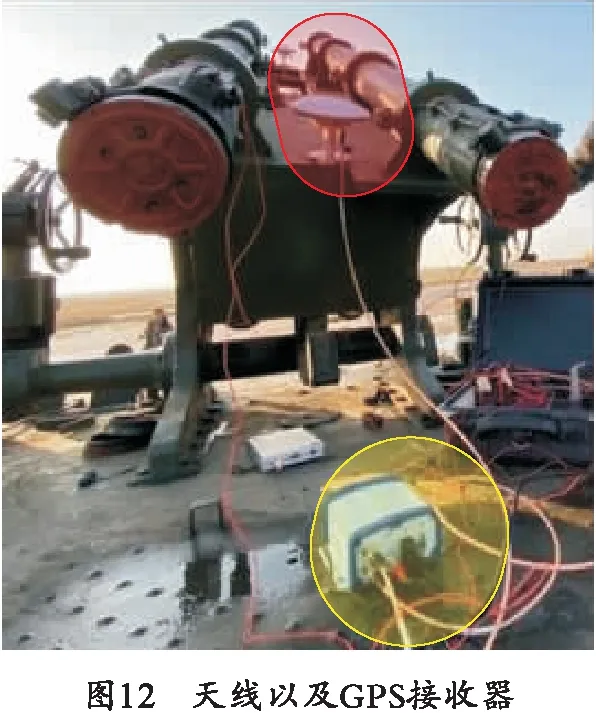
3.2 GPS差分定位定向數據讀取和校準
靶場規劃設計完成后,需要與實際試驗相結合。需要通過設計數據與GPS定位數據相校準,然后按照設計的方法進行試驗,如圖9所示。GPS定位獲取途徑主要是通過第1.2節所描述的定位定向設備完成,包括設備:GPS差分天線以及GPS接收器,如圖12紅色標記和黃色標記所示。
本平臺通過RS-232串口實現GPS接收機與安卓上位機的連接及通信。串口通信過程首先需要安卓設備發送GPS接收器的串口參數如波特率、數據位等進行對接收器的設置,然后其會持續收到接收器返回的定位定向數據,安卓設備則需實時獲取串口數據[10]。
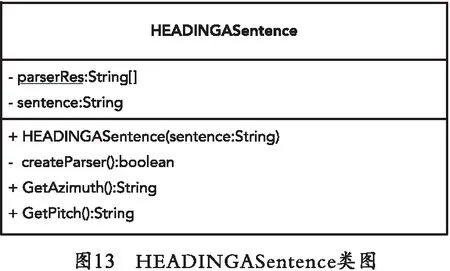
由于接收到的二進制文件為NMEA-0183格式,NMEA-0183是GPS導航設備統一的RTCM(Radio Technical Commission for Maritime services)標準協議,因此選用了開源的解析庫JavaMarineAPI,在此基礎上增添了HEADINGASentence類對HEADINGA報文的解析,以獲取方位角、俯仰角等重要信息[11-12],類圖如圖13所示。
由于Android主進程無法保證串口信息發送的持續性、實時性,因此定義了ReadThread類以多線程的方式獲取定位信息,最后在軟件層面實現了相應的串口數據讀取功能,如圖14所示。
4 結束語
針對防空武器訓練用高速靶彈任務規劃問題,提出了一種基于便攜式安卓設備的高速靶彈任務規劃系統。應用定位定向設備、氣象測量儀和便攜式安卓設備搭建了系統硬件平臺,采用彈道快速解算與混合編程技術實現了彈道與射表的快速計算,并使用OSMDroid開發了基于地圖的發射任務規劃模塊,最后基于安卓系統完成了系統開發。經過測試驗證,系統運行穩定,滿足任務規劃要求,可以極大地提高靶彈發射任務規劃效率。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
