自行彈炮結合防空武器間信息傳遞誤差研究
2022-04-20 11:25:30鮑晨希丁天寶何浩何朝
火炮發射與控制學報 2022年2期
關鍵詞:信息
鮑晨希,丁天寶,何浩,何朝
(西北機電工程研究所,陜西 咸陽 712099)
自行彈炮結合防空武器系統[1]一般以連為基本建制裝備部隊,一個連套裝備通常由一臺連指揮車、若干臺自行彈炮結合武器(以下簡稱“戰車”)和若干保障裝備組成。自行彈炮結合防空武器系統主要有3種作戰方式:一是在連指揮車指揮下的連建制作戰;二是兩臺以上戰車實施的主從作戰;三是單臺戰車實施的自主作戰。
戰車是實施作戰的主體,其作戰流程的主要環節為:目標搜索、目標跟蹤、火控解算、火力打擊。就這4個環節來說,前面的環節是后面工作的前提;換句話說,如果前面環節的功能出了問題,則后續的功能也就無法正常進行。筆者通過研究火控組網解決以下幾個問題:借用連指揮車或其他戰車目標搜索信息,解決本戰車目標搜索功能缺失情況下的目標搜索問題;借用其他戰車目標跟蹤信息,解決本戰車目標跟蹤功能缺失情況下的目標跟蹤問題;借用其他戰車火控解算信息,解決本戰車火控解算功能缺失情況下的火控諸元解算問題。
火控組網信息在傳遞和處理過程中,非線性坐標變換使火控組網信息誤差變大,信息傳遞過程中的數據時延導致滯后誤差[2-3],這些誤差導致火控組網所傳遞的數據精度降低。因此,需要對火控組網信息傳遞中誤差的變化規律進行分析,以提高火控組網中所傳遞信息的精度。
本文的火控組網指主從車點對點傳輸下的信息共享過程,筆者主要研究信息傳遞過程中目標搜索數據在傳遞后誤差的變化規律及減小方法。目標搜索數據誤差由系統誤差和隨機誤差兩部分組成。系統誤差可以通過統計方法尋找誤差變化規律后進行補償,而隨機誤差由于其隨機性無法被靜態補償。筆者以火控組網中主從模式搜索信息共享過程為例對隨機誤差部分的引入和傳遞進行建模分析,同時將數據傳輸導致的時延誤差加入誤差傳遞模型,在誤差傳遞模型的基礎上尋找合適的方法減小時延帶來的數據滯后并減小隨機誤差,提高搜索信息傳遞和共享的精度。
1 火控組網原理
首先,對火控組網中涉及的數據進行定義:搜索信息(DS,εS,βS)為搜索雷達斜距離、高低角和方位角,(ΔDS,ΔεS,ΔβS)為對應量測誤差;跟蹤信息(DR,εR,βR)為跟蹤雷達斜距離、高低角和方位角,(ΔDR,ΔεR,ΔβR)為對應量測誤差;火控解算信息(εtc,βtc,tf)為火控方位、高低和彈飛時間;車體姿態信息(K,ψ,θ)為車體方位角、橫搖角和縱搖角,(ΔK,Δψ,Δθ)為對應量測誤差;車體位置信息(x0,y0,z0)為車體在固定坐標系下的直角坐標分量,(Δx0,Δy0,Δz0)為對應量測誤差。火控組網原理如圖1所示。

圖1描述了單一戰車自主作戰流程的主要環節;分別解釋了火控組網中搜索信息共享、跟蹤信息共享和火控解算信息共享發生在戰車作戰流程的哪一環節下以及共享的信息所包含的數據。
1)火控組網搜索信息共享原理。火控組網搜索信息共享指V2車無法完成V2.1環節時,可以通過無線網絡接收V1車V1.1和V1.5環節獲取的數據,將該數據處理后作為V2車V2.1環節的輸出引導V2車轉入V2.2環節。
2)火控組網跟蹤信息共享原理。火控組網搜索信息共享指V2車無法完成V2.2環節時,可以通過無線網絡接收V1車V1.2和V1.5環節獲取的數據,將該數據處理后作為V2車V2.2環節的輸出引導V2車轉入V2.3環節。
3)火控組網火控解算信息共享原理。火控組網火控解算信息共享指V2車無法完成V2.3環節時,可以通過無線網絡將V2車V2.5環節獲取的數據傳送給V1車;V1車通過無線網絡接收V2車V2.5環節獲取的數據后,結合自身V1.2和V1.5環節獲取的數據替V2車完成V2.3環節,并將該環節的計算結果通過無線網絡傳輸回V2車引導V2車轉入V2.4環節。
2 火控組網信息傳遞數學模型
2.1 坐標系、轉換關系及變量定義
筆者參考自行彈炮結合防空武器系統對坐標系的通用定義[1],在該定義基礎上對使用到的坐標轉換矩陣進行符號定義。主要用到的坐標系有固定坐標系OXYZ,車體坐標系OctXctYctZct及車體球坐標系(D,ε,β)。設由車體坐標系向固定坐標系轉換時涉及橫滾角ψ和縱搖角θ的轉換矩陣為A(ψ,θ),涉及航向角K的轉換矩陣為B(k),由車體球坐標系向車體坐標系轉換的矩陣函數為H(D,ε,β),由車體坐標系向車體球坐標系轉換的矩陣函數為Z(xct,yct,zct)。
火控組網信息傳遞數學模型推導使用的變量定義如下:
t1(t)=[D1(t)ε1(t)β1(t)]T:t時刻主車車體球坐標系下的目標信息真值;
tct1(t)=[xct1(t)yct1(t)zct1(t)]T:t時刻主車車體坐標系下的目標信息真值;
t(t)=[x(t)y(t)z(t)]T:t時刻固定坐標系下的目標信息真值;
tct2(t)=[xct2(t)yct2(t)zct2(t)]T:t時刻從車車體坐標系下的目標信息真值;
t2(t)=[D2(t)ε2(t)β2(t)]T:t時刻從車車體球坐標系下的目標信息真值;
ta1(t)=[k1(t)ψ1(t)θ1(t)]T:t時刻主車車體姿態信息真值;
t01(t)=[x01(t)y01(t)z01(t)]T:t時刻主車位置信息真值;
ta2(t)=[k2(t)ψ2(t)θ2(t)]T:t時刻從車車體姿態信息真值;
t02(t)=[x02(t)y02(t)z02(t)]T:t時刻從車位置信息真值。
2.2 火控組網信息傳遞數學模型
為實現火控組網共享,需對待共享信息進行處理,使一戰車獲取的數據可以被其他戰車使用,這是火控組網中的信息傳遞過程。在沒有誤差的理想條件下,火控組網信息傳遞的核心模型為待共享信息從主車車體坐標系轉換至從車車體坐標系的數學模型,轉換步驟為
1)被傳遞信息從主車車體球坐標系下轉換至主車車體坐標系下,計算公式為
tct1(t)=H(D1(t),ε1(t),β1(t)).
(1)
2)被傳遞信息從主車車體坐標系下轉換至固定坐標系下,計算公式為
t(t)=B(k1(t))A(ψ1(t),θ1(t))tct1(t)+t01(t).
(2)
3)被傳遞信息從固定坐標系下轉換至從車車體坐標系下,計算公式為
tct2(t)=A-1(ψ2(t),θ2(t))B-1(k2(t))
[t(t)-t02(t)].
(3)
4)被傳遞信息從從車車體坐標系下轉換至從車車體球坐標系下,計算公式為
t2(t)=Z(xct2(t),yct2(t),zct2(t)).
(4)
聯立式(1)~(4)即可得到火控組網信息傳遞的數學模型。
3 火控組網信息傳遞誤差分析
3.1 火控組網信息傳遞誤差源分析
對火控組網中共享信息傳遞流程進行分析,目標信息從主車傳遞至從車過程中誤差源[4]引入過程如圖2所示。

3.2 火控組網信息傳遞誤差模型
根據坐標轉換公式和誤差源引入過程,利用函數誤差傳遞公式對搜索信息傳遞誤差建模[5-7]。模型推導使用的變量定義如下:
Δt:信息從主車傳遞至從車的時延;
Δt1(t)=[ΔD1(t)Δε1(t)Δβ1(t)]T:t時刻主車車體球坐標系下的目標信息量測誤差;
Δtct1(t)=[Δxct1(t)Δyct1(t)Δzct1(t)]T:t時刻主車車體坐標系下的目標傳遞誤差;
Δt(t)=[Δx(t)Δy(t)Δz(t)]T:t時刻固定坐標系下的目標傳遞誤差;
Δtct2(t)=[Δxct2(t)Δyct2(t)Δzct2(t)]T:t時刻從車車體坐標系下的目標傳遞誤差;
Δt2(t)=[ΔD2(t)Δε2(t)Δβ2(t)]T:t時刻從車車體球坐標系下的目標傳遞誤差;
Δta1(t)=[Δk1(t)Δψ1(t)Δθ1(t)]T:t時刻主車車體姿態信息的量測誤差;
Δt01(t)=[Δx01(t)Δy01Δz01(t)]T:t時刻主車位置信息的量測誤差;
Δta2(t)=[Δk2(t)Δψ2(t)Δθ2(t)]T:t時刻從車車體姿態信息的量測誤差;
Δt02(t)=[Δx02(t)Δy02Δz02(t)]T:t時刻從車位置信息的量測誤差。
假設信息從主車傳遞至從車的時延Δt=0,結合2.2節的火控組網信息傳遞數學模型建立無時延傳遞誤差模型:
(5)
(6)
(7)
(8)
聯立式(5)~(8)即可得到無時延傳遞誤差模型。
實際情況下,信息從主車傳遞至從車時存在傳輸時延Δt,傳輸時延Δt主要包括主車搜索雷達獲取信息后通過CAN總線傳輸給主車寬帶車載臺的時延Δt1,主車寬帶車載臺通過無線網絡向從車寬帶車載臺傳輸的時延Δt2和從車寬帶車載臺接收信息后通過CAN總線向從車信息處理分系統傳輸的時延Δt3。其中CAN總線的特性決定了傳輸時延Δt1、Δt3是固定時延,由于主從車寬帶車載臺開機時間差異以及內部時鐘時差的共同作用,無線網絡傳輸時延Δt2具有隨機性;顯然Δt=Δt1+Δt2+Δt3,因此主從車間的信息傳輸時延為隨機時延。t時刻時從車接收的數據為t-Δt時刻主車獲取的數據,因此建立傳遞誤差模型時t時刻主車車體球坐標系下的目標信息量測誤差應表示為
同理可得t時刻主車車體姿態信息和位置信息的量測誤差表達式。
同時t時刻從車從主車接收的的數據t1(t)、ta1(t)、t01(t)時標應改為t1(t-Δt)、ta1(t-Δt)、t01(t-Δt);將以上向量回代至上文建立的無時延傳遞誤差模型,得到帶時延的傳遞誤差模型。
3.3 火控組網信息傳遞誤差變化規律分析
分別分析目標信息量測誤差、主從車方位姿態誤差和主從車位置誤差對共享信息傳遞后誤差變化的影響規律。
設直角坐標系XOY上有以A(x1,y1)、B(x2,y2)為極點,以過極點平行于X軸正方向的射線為極軸的兩個極坐標系,坐標系定義如圖3所示。

設目標點在極坐標系A下的理論坐標為(r1,β1),誤差為(Δr1,Δβ1);通過坐標間的數學關系建立目標點信息從極坐標系A傳遞至極坐標系B的誤差傳遞模型,考察主從車相對位置關系對共享信息傳遞誤差的影響,模型的數學表達式為
(9)
分析式(9)可知,信息傳遞后的誤差是傳遞前目標信息斜距離量測誤差和角度量測誤差的加權合,權重和A、B與目標連線的夾角的角度差及斜距離有關,即與A、B間的相對位置關系有關;且角度差越大,目標離A越遠時傳遞后的信息誤差越大。可知由于A、B不在同一物理位置上導致傳遞過程中對原始量測誤差在兩個維度信息上的重新分配,這一現象會導致信息傳遞后各維度信息量測誤差發生變化影響信息的精度,因此主車的數據未經處理直接轉換至從車很可能導致數據不滿足使用需求,需要在轉換前先對誤差進行處理。
設直角坐標系XOY上兩極坐標系極點與O重合,極軸分別為與OX軸夾角為α1、α2的射線,坐標系定義如圖4所示。
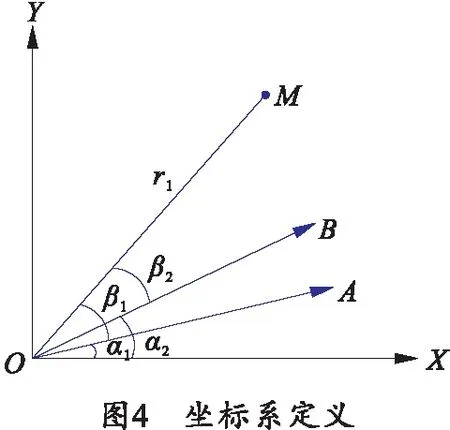
設目標點在極坐標系A下的理論坐標為(r1,β1),極坐標系A、B極軸與OX軸夾角誤差分別為Δα1、Δα2;通過坐標間的數學關系建立目標點信息從極坐標系A傳遞至極坐標系B的誤差傳遞模型,考察主從車姿態量測誤差對共享信息傳遞誤差的影響,模型的數學表達式為
(10)
分析式(10)可知,在主從車位置接近時,單純的車體姿態量測誤差不會影響搜索信息傳遞后斜距離的誤差,但角度誤差有可能會疊加,對角度誤差取標準差可知角度誤差的波動幅度會由于主從車車體姿態量測誤差的疊加而變大。因此應在姿態量測信息參與坐標轉換前對其進行濾波。
沿用圖4所定義坐標系,設目標點在極坐標系A下的理論坐標為(r1,β1),在直角坐標系下與OX軸的夾角為θ,極坐標系A、B極點與O點位移誤差分別為(Δx01,Δy01)、(Δx02,Δy02);通過坐標間的數學關系建立目標點信息從極坐標系A傳遞至極坐標系B的誤差傳遞模型,考察主從車位置量測誤差對共享信息傳遞誤差的影響,模型的數學表達式為
(11)
分析式(11)可知,主從車位置信息量測誤差會導致傳遞后誤差的變化,對傳遞后誤差取標準差可知傳遞后誤差的波動幅度會由于主從車車體位置量測誤差的疊加而變大。因此應在位置量測信息參與坐標轉換前對其進行濾波。
4 基于卡爾曼濾波的誤差抑制
對于主從車的姿態信息和位置信息的量測誤差,建立相應的線性狀態空間模型,使用線性卡爾曼濾波[8]減小隨機誤差后再用于坐標轉換過程。由于主車搜索雷達獲取的目標量測信息無法直接建立狀態轉移方程;故先在固定坐標系上建立目標狀態轉移方程,再結合坐標系間轉換矩陣建立觀測方程,采用擴展卡爾曼濾波[9]減小目標信息量測誤差,狀態方程的輸出作為目標量測信息從主車車體球坐標系轉換至固定坐標系下濾波后的坐標信息及目標在固定坐標系下的運動參數。由3.2節的分析可知,主從車間信息傳輸時延為隨機時延,即從車獲取主車數據的時間間隔是隨機的,但被傳輸的搜索數據本身是以20 ms為間隔均勻獲取的,滿足卡爾曼濾波數據點等間隔的要求。因此在數據處理時,從車可以對獲取的數據進行卡爾曼濾波,但濾波后的數據與從車當前時間的時差是隨機的,為獲得精確的傳輸時延估計用于將濾波后目標在固定坐標系下的坐標信息外推至當前時間點,需利用GPS授時對主從車寬帶車載臺進行時統,再結合CAN總線傳輸的固定時延給共享搜索信息打上時間戳,通過時間戳計算總傳輸時延。從車從主車接收目標搜索信息、主車姿態及位置信息和時間同步信息后,坐標轉換及濾波外推處理流程如圖5所示。
主從車車體方位姿態量測信息及車體位置量測信息狀態空間模型在靜止狀態下結構相同參數不同,狀態轉移方程及觀測方程為
(12)


建立好狀態空間模型后應用線性卡爾曼濾波器對這兩種量測誤差進行修正。
對目標位置信息建立空間狀態模型,狀態轉移方程及觀測方程為
(13)
式中:
X(k)=[x(k)y(k)z(k)vx(t)vy(k)vz(k)]T,為目標在固定坐標系下的位置信息及速度信息,速度信息的初值可結合航跡起始的一串連續點進行計算;Y(k)=[D(k)ε(k)β(k)]T,為主車搜索雷達獲取的目標信息觀測值;V(k)為主車搜索雷達的量測誤差,是均值為0、方差陣為R的不相關高斯噪聲,即E[V(k)VT(j)]=Rδkj,k≠j,δkk=1,δkj=0;E(V(t))=[0 0 0]。
觀測值Y(k)與狀態X(k)的映射關系表示為
Y(k)=Z(xct1(k),yct1(k),zct1(k)),
(14)
(15)
聯立式(14)、(15)即可得h(k,X(k))的表達式。由于觀測方程是非線性的,因此先對觀測方程進行線性化再使用線性卡爾曼濾波方法進行濾波。對觀測方程在當前狀態的濾波值處做一階泰勒展開,保留線性項,線性化后的觀測方程表達式為
Y′(k)=H(k)X(k)+y(k)+V(k).
(16)
令Xct1(k)=[xct1(k)yct1(k)zct1(k)],X′(k)=[x(k)y(k)z(k)],H(k)的表達式為
(17)
從車對接收的目標搜索信息濾波后,目標搜索信息從主車車體坐標系轉換至固定坐標系,并且減小了隨機誤差的波動幅度,由于數據傳輸存在時延Δt,故當前時刻t濾波后固定坐標系上的目標信息X′(t)實為t-Δt時刻的目標信息X(t-Δt),利用濾波后精度更高的目標位置信息[x(t-Δt)y(t-Δt)z(t-Δt)]T和目標速度信息[vx(t-Δt)vy(t-Δt)vz(t-Δt)]T外推出當前時刻t時的目標位置信息,計算公式為
(18)
經過濾波和外推后的目標搜索信息減小了空間和時間上的誤差,再通過坐標變換矩陣將搜索信息從固定坐標系轉換至從車車體坐標系,即可引導從車轉入對目標的跟蹤。
5 火控組網搜索信息共享誤差仿真
以火控組網搜索信息共享過程為例進行仿真,在仿真中引入各類量測誤差[10],觀察搜索信息共享后誤差的變化規律。
假定主車與從車皆處于靜止狀態,主車方位角、橫滾角和縱搖角分別為(k1,ψ1,θ1)=(15°,-5°,10°),在固定坐標系下的位置為(x01,y01,z01)=(50 m,75 m,10 m);從車方位角、橫滾角和縱搖角分別為(k2,ψ2,θ2)=(-15°,10°,-5°),在固定坐標系下的位置為(x02,y02,z02)=(25 m,100 m,-5 m)。目標在固定坐標系上從點(4 000 m,4 500 m,3 000 m)處起始,以(-300 m/s,-400 m/s,-100 m/s)的初速度做勻速直線運動,主車搜索雷達對目標進行探測,并將目標信息共享給從車。
假設主從車所有量測誤差均為服從高斯分布的隨機誤差;搜索雷達距離誤差標準差為60 m,高低角誤差標準差為0.4°,方位角誤差標準差為0.5°;主從車位置誤差標準差為10 m,主從車車體航向角、縱搖角和橫滾角誤差標準差為1密位,數據傳輸時延為100 ms。
對主車搜索雷達原始量測誤差進行仿真,引入主從車車體位置及姿態量測誤差,在主車時間軸上對搜索信息傳遞過程進行仿真,得到搜索信息傳輸前后的誤差變化,仿真結果如圖6~8所示。

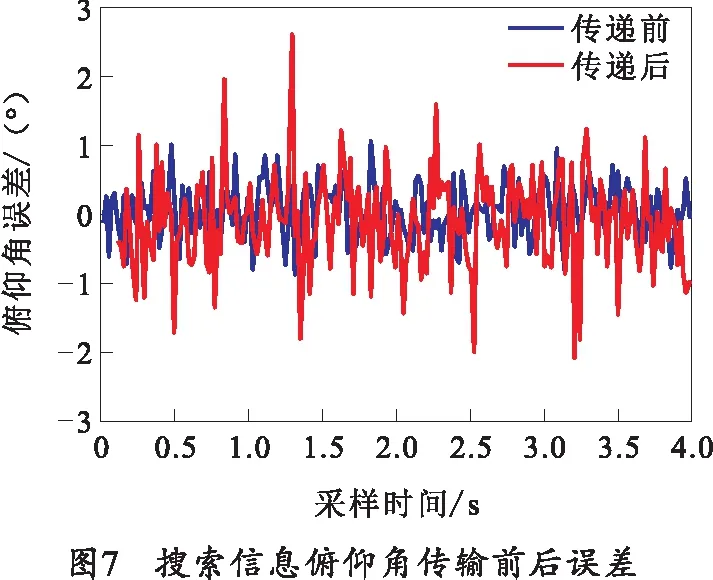

由圖6~8可知,主車獲取的目標搜索信息經過搜索信息傳遞過程后,由于主從車的位置不同及車體位置、姿態量測誤差和數據傳輸時延的引入導致搜索信息傳遞后的波動幅度明顯變大,無法滿足從車使用該信息轉入對目標跟蹤的需求。
將第4節中建立好的濾波器模型引入火控組網搜索信息共享流程中,進行濾波及外推后目標位置信息從主車共享至從車后距離、俯仰角和方位角的誤差仿真,利用觀測值的前80個點使用線性回歸法初始化濾波器。仿真結果如圖9~11所示。
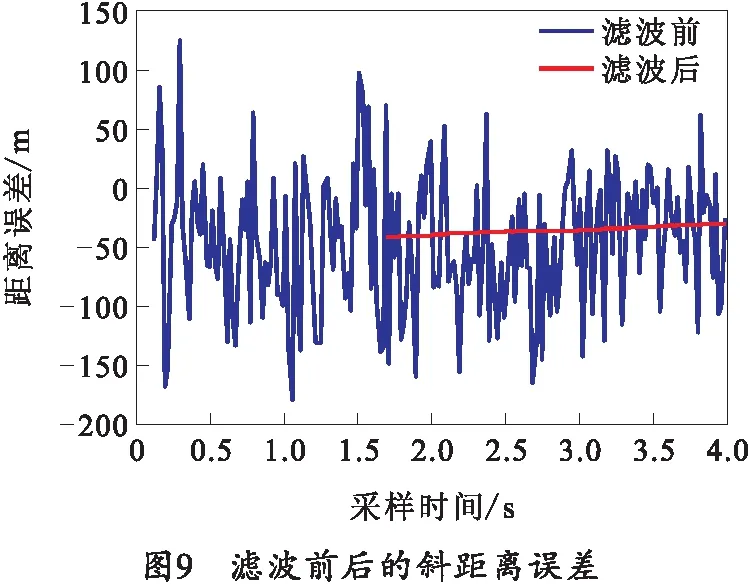


由圖9~11可知,與濾波前相比,目標搜索信息從主車轉換至從車后距離、俯仰角和方位角的誤差在經過濾波后誤差波動幅度減小,經計算可得斜距離傳遞誤差標準差為3.173 3 m、俯仰角傳遞誤差標準差為0.030 4°、方位角傳遞誤差標準差為0.035 2°,滿足從車轉入對目標跟蹤的精度需求。
6 結束語
筆者介紹了火控組網的基本原理,從建立火控組網信息傳遞數學模型出發,使用函數傳遞誤差分析方法對信息共享后從車獲得的目標信息的誤差進行分析,對不同傳感器的量測誤差分別建立狀態空間模型并利用卡爾曼濾波減小隨機誤差,最后使用濾波外推后的數據完成搜索信息的轉換。仿真結果表明該方法可以減小搜索信息共享時隨機誤差的波動幅度,滿足從車轉入對目標跟蹤的精度需求。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
