傾斜攝影測量在三維地形圖繪制中的應用
2022-04-20 08:04:02李春雨郁鵬飛
農業與技術 2022年7期
李春雨郁鵬飛
(1.華北理工大學礦業工程學院,河北 唐山 063210;2.中國地質大學,北京 100000)
引言
地形圖廣泛應用在人們生產生活中。鑒于傳統測量形式單一、數字化水平低的現狀,無人機傾斜攝影測量以作業靈活、低成本、效率高的優勢逐漸走進人們的視野[1]。國內外學者對此也有廣泛的關注,VCasella等[2]提出了針對地形起伏較大區域的傾斜攝影測量建模方案;Yanbiao Sun等[3]為了優化三角測量,提出了光束法平差提高測量精度;Taowen Sun[4]使用BIM模型和無人機建立三維模型應用于房屋測量;Kristian等[6]以地形露頭傾斜影像為基礎來構建格陵蘭島三維模型。蔡嘉倫等[7]針對國內傾斜攝影測量精度較低的問題,采用遞進布設方式進行量化分析;李祎峰等[8]基于傾斜測量的地理空間信息和應用平臺系統開始出現,該系統軟件具有“影像三維測量”功能,為公共安全及應急指揮、城市規劃、通訊等領域做出了較大貢獻。張晶晶等[9]將傾斜攝影測量技術應用于地籍三維測量中,描述不同影像空三加密方法。
1 研究區概況與數據源
1.1 研究區概況
實驗區域位于華北理工大學D區教學樓,面積約為0.15km2。主要地物有樓房、道路和少許綠化,屬溫帶季風性氣候,地勢平坦,地物特征明顯,無明顯遮擋物。拍攝時間為4月,當天天氣晴朗,適合作為拍攝場地。
1.2 數據源
本次實驗共采集了19個像控點,像控點分布在道路標線處和明顯地物的邊角,覆蓋了整個航拍區域,布設點如圖1所示。像控點大地坐標數據如表1所示。無人機搭載相機焦距為8.8mm,設置航拍高度100m,相機傾角為60°,航向、旁向重疊率均為80%。拍攝18條航帶,獲得傾斜影像1235張。
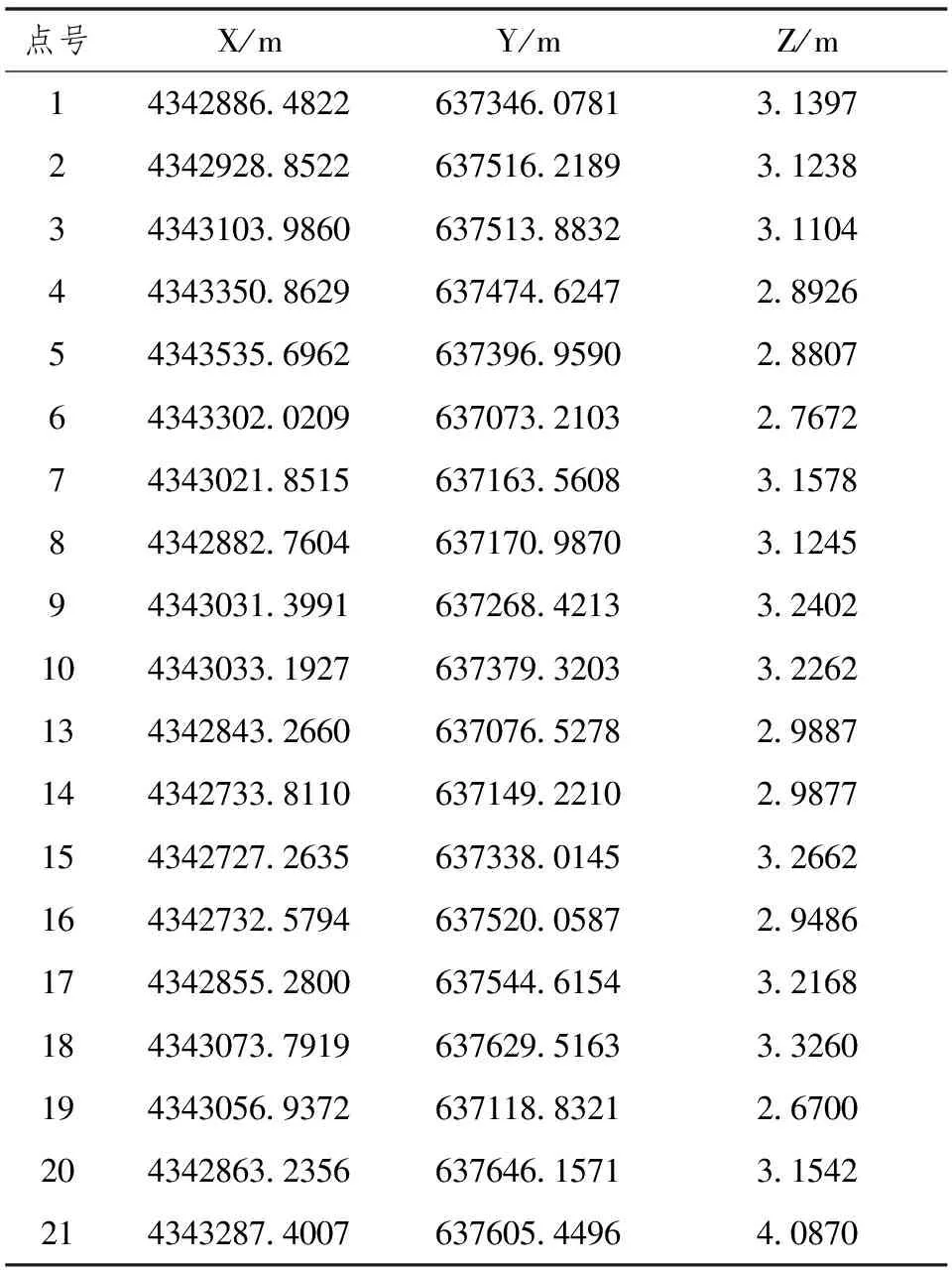
表1 實驗區像控點坐標數據

圖1 實驗區區像控點布設
2 三維模型建立
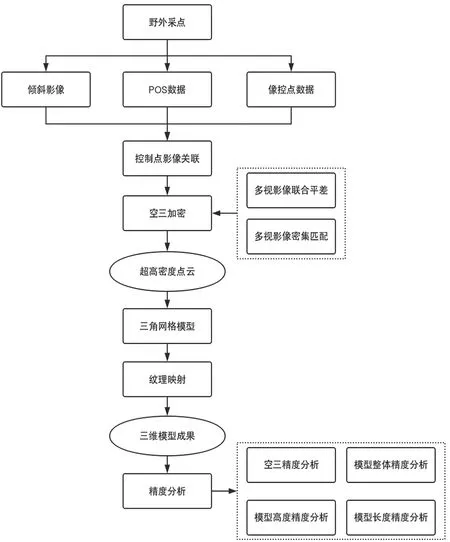
圖2 模型建立流程圖
3 三維地形圖成果分析
3.1 成果展示
本次實驗的建模區域為華北理工大學D區教學樓,具體成果如圖3。圖3b為點云圖,包括控制點與自動連接點。圖3c為空三計算后構成的不規則三角網,稱之為TIN模型,能在表示不同地物時達到較好的效果,并能表示地形起伏復雜的區域。
3.2 精度評定
空中三角測量是傾斜影像數據處理的關鍵一步,空三精度決定了后面建模的質量。因此,對空三完成后的報告進行分析評價可直觀感受模型的品質。本文以中誤差作為衡量模型精度質量評價標準。
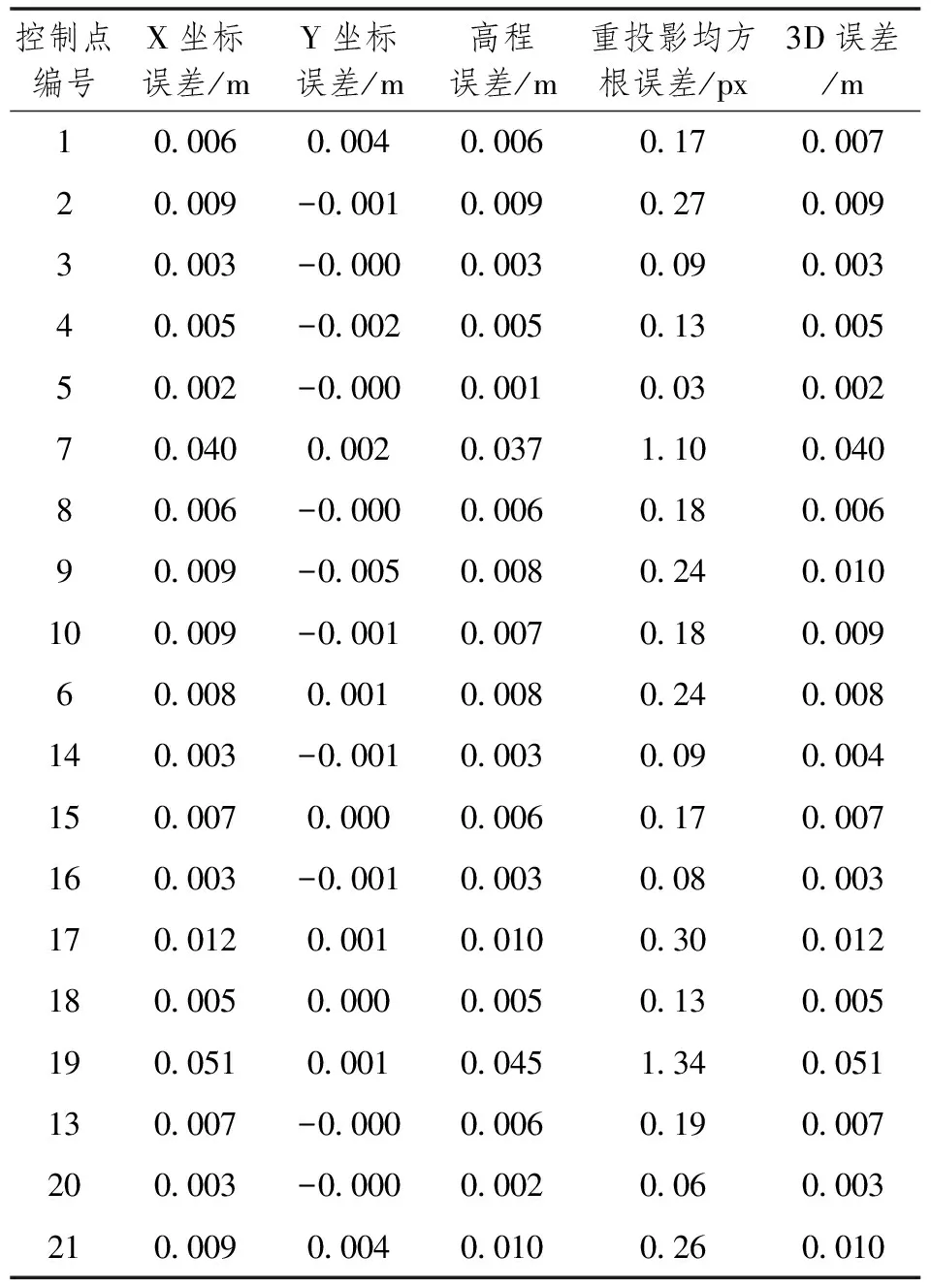
表2 實驗區空三精度
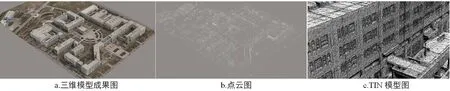
圖3 三維模型成果
由表2可知,中誤差中,X坐標為0.016m,最小為0.002m,最大值為0.016m;Y坐標為0.002m,最小為0.00m,最大誤差為0.005m;平面和高程中誤差分別為0.016和0.015m;重投影和3D誤差分別為0.43px和0.016m。中誤差各值皆小于1個像素,且分辨率范圍0.026~0.039m,本次空三加密過程良好。
3.2.1 模型整體精度評價
將野外實測控制點坐標與三維模型量測的對應點坐標求取中誤差,評定三維模型的平面中誤差和高程中誤差,其中,1∶500成圖比例尺外業和非外業平面精度分別為0.3m和0.5m,1∶1000、1∶2000、1∶5000精度分別為0.8m、1.4m、3.5m;表3為地形精度規范,表4為模型檢查點坐標。
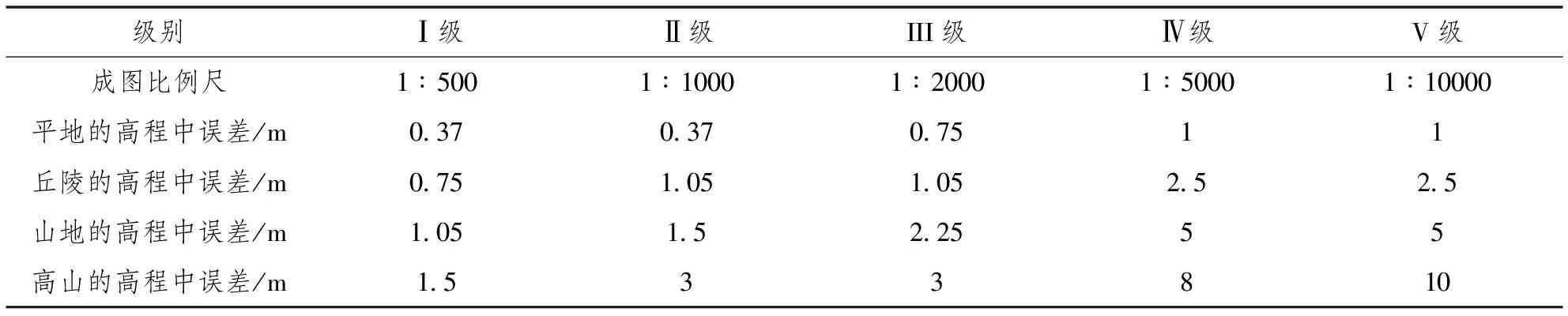
表3 地形精度規范
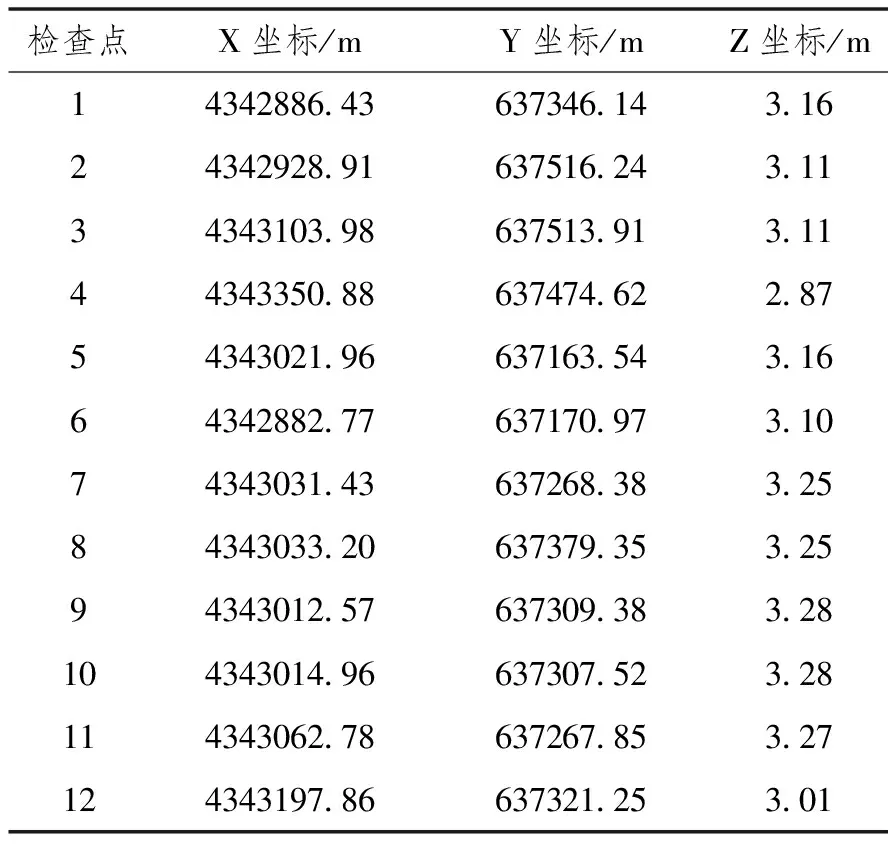
表4 模型上檢查點坐標
在生成的三維模型上量測12個檢查點的坐標,X方向中誤差為0.052m,Y方向為0.038m,平面為0.064m,高程中誤差為0.026m。平面中誤差小于0.5m,高程中誤差小于0.37m,因此生成的三維模型精度達到1∶500比例尺測圖精度。
3.2.2 模型高度精度評價
為了避免生成的三維模型與真實地物差距偏大,因此對模型中的地物高度和實際測量高度進行精度評定。高度精度規范中,1∶500外業和非外業調繪分別為0.5m和0.8m;1∶1000和1∶2000精度為1m和2m。模型高度精度分析方法是將模型量測值與實測采集到的地物高度真值求高差并計算中誤差,得到模型高度精度。地物高度用高精度全站儀測量記錄,選點多為D區建筑物,主要為樓房高度,窗沿距離地面的高度,低矮房屋高度等。表5為模型高度統計表。
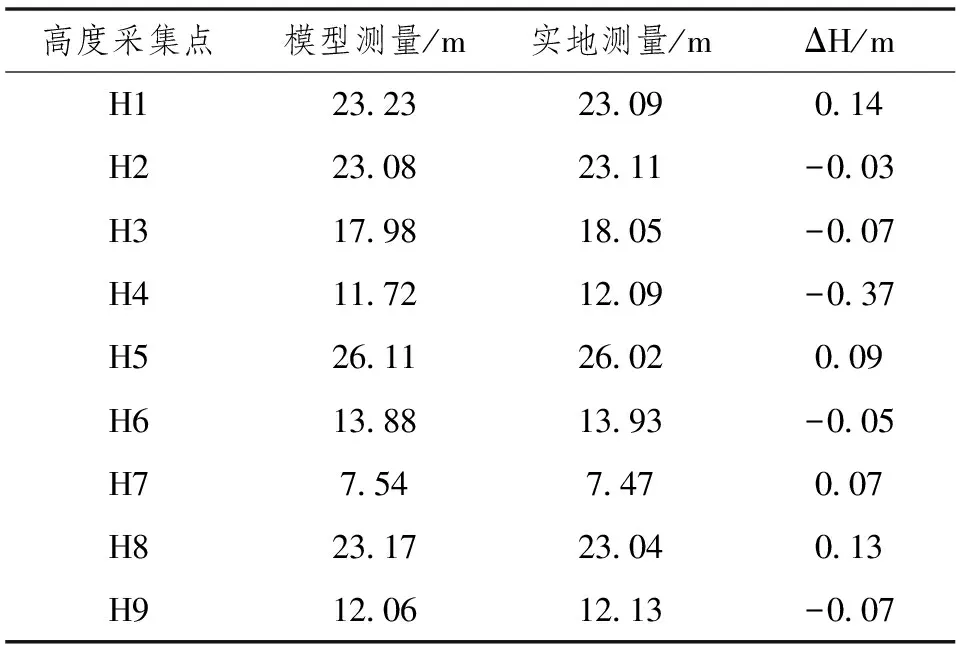
表5 模型高度統計表
3.2.3 模型長度精度評價
本文采用模型量測距離與RTK采集固定點坐標計算出的2點間的長度,求差值并獲得中誤差。主要選取了街道寬度、樓房邊長、草坪邊長等幾類地物,表6為邊長長度統計表。
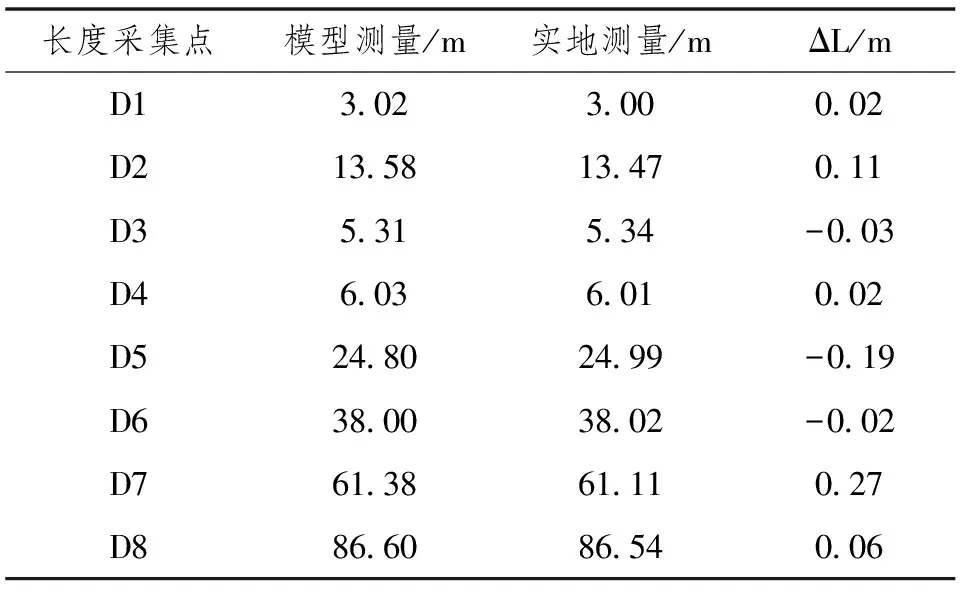
表6 模型長度統計表
本次模型長度中誤差為0.173m,最大誤差為0.27m,最小誤差為0.02m。
4 結論
與傳統建模方法相比,使用傾斜攝影測量技術建模的時間被大大縮減,均達到《三維地理信息模型數據產品規范》Ⅰ級標準,可以投入實際應用中,對將實景三維地形圖應用到人們日常生活中有一定的推動作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03