殘疾人輪椅智能避障功能創(chuàng)新研究
2022-04-11 11:02:17王榕趙延浩郝智誠陳日莉
電腦知識與技術(shù) 2022年5期
王榕 趙延浩 郝智誠 陳日莉

摘要:為研究電動輪椅的智能避障功能,該研究特點在于將HC-SR04超聲波傳感器和ZY101紅外避障傳感器相結(jié)合使輪椅對環(huán)境的感知更加準確,通過多傳感器融合技術(shù)和模糊控制技術(shù)的研究進一步提高避障功能計算的精確度,使電動輪椅在實際行駛中可以自主地完成路線規(guī)劃并躲避障礙物,更安全便捷地抵達目的地。
關(guān)鍵詞:智能避障;多傳感器融合;模糊控制
中圖分類號:TP18 ? ? ?文獻標識碼:A
文章編號:1009-3044(2022)05-0014-03
1 研究背景及意義
調(diào)查顯示,我國現(xiàn)有殘疾人、失能和半失能老人超過1.5億人,從輔助器具的使用量來看,現(xiàn)有為殘疾人有效提供急需的救助設(shè)施和服務(wù)仍然不足。由此看來,智能避障輪椅擁有廣闊的市場發(fā)展前景,其發(fā)展必不可少。智能輪椅國內(nèi)外研究現(xiàn)狀及發(fā)展趨勢見[1-2]。
基于電動輪椅和智能避障系統(tǒng)的研究,使輪椅能夠在實際操作過程中躲避道路上的障礙物且不斷感知周圍狀況,進而自主規(guī)劃和調(diào)整最優(yōu)路線,能夠安全快捷地到達目的地。此研究利用現(xiàn)代科技幫助弱勢群體更好地融入社會、建立良好的人際關(guān)系,且最重要的意義是降低輪椅事故的發(fā)生率和為殘疾人建立安全舒適的生活通道。
2 研究內(nèi)容
本研究采用“Arduino Uno R3”作為整個系統(tǒng)的核心,同時將常見的“HC-SR04”超聲波傳感器和“ZY101”紅外避障傳感器共同作用于障礙物感知和測距,通過模糊控制算法融合這兩種傳感器的工作結(jié)果,從而在輪椅遇到障礙物時,遵循模糊規(guī)則進行自動避障,控制輪椅的轉(zhuǎn)向,使輪椅不與障礙物發(fā)生碰撞。進一步,在設(shè)定循跡模式的運行中遇到障礙物時,輪椅先進行智能避障,再判斷是否繼續(xù)循跡,實現(xiàn)輪椅在到達目的地的過程中能夠智能化進行路徑規(guī)劃、躲避障礙物并安全地到達目的地。下面分別從避障循跡系統(tǒng)控制子模塊和模糊控制兩大方面展開敘述。
2.1 避障循跡系統(tǒng)控制子模塊
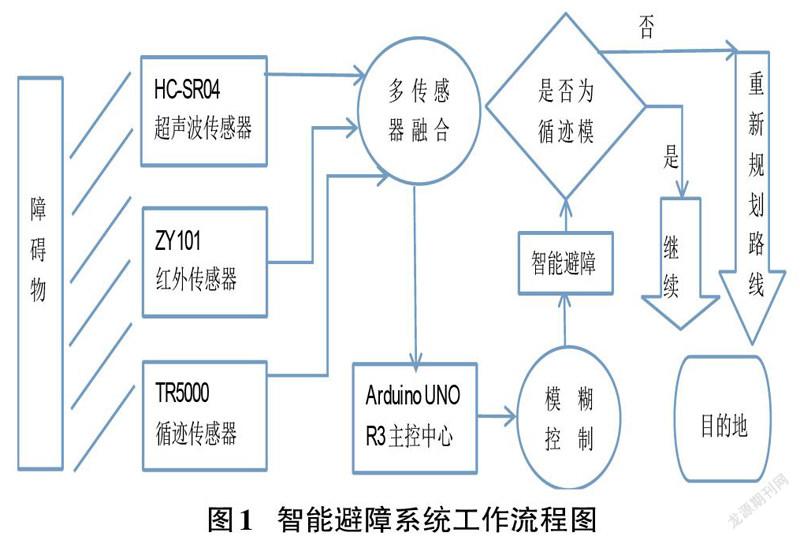
基于智能輪椅在朝目標地點正常前行或循跡狀態(tài)中,超聲波傳感器測出各個方向是否有障礙物及距障礙物的距離,同時紅外傳感器檢測各個方向的障礙物狀況,反饋到“Arduino UNO R3”主控中心。當(dāng)輪椅接收到多個傳感器的反饋信息時利用模糊控制算法,進行避障繞行分析、驅(qū)動電機模塊、控制前后左右輪胎速度,進行合理準確的避障、及時做出應(yīng)對動作,進行智能避障。最終輪椅將沿著最優(yōu)路徑重新規(guī)劃路線直至目的地或避障動作完成后又繼續(xù)進行循跡。如圖1為智能避障系統(tǒng)工作流程圖。
1)“HC-SR04 ”超聲波傳感器測距方法:用“Trig”觸發(fā)測距,先給“Trig”引腳一個持續(xù)時間>10μs的高電平,等待“Echo”引腳返回高電平。因為障礙物到發(fā)射器/接收器的距離公式:
h=t*c/2,
其中,c=340 m/s為超聲波在空氣中的傳遞速度。所以只需再知道這個高電平的持續(xù)的時間t ,就能根據(jù)公式得到超聲波傳輸?shù)木嚯xh[3-5]。
}
2)ZY101傳感器和其他紅外傳感器一樣,靈敏度高,便于對近距離路面情況的檢測。它判斷前方有無障礙物的工作方法是:發(fā)光管發(fā)射出去的紅外光束遇到障礙物會反射回來,接收管接收到反射光會將信號傳達給“Arduino UNO R3”主控模塊。從而根據(jù)接收信號判斷障礙物遠近及控制外部驅(qū)動模塊、調(diào)節(jié)安全的前進方向。在前方檢測到有障礙物的情況下,則輸出低電平,蜂鳴器響,“LED”燈亮;反之,蜂鳴器不響,“LED”燈不亮。
3)TR5000循跡傳感器也是利用物體的反射性質(zhì),首先需要在地面貼上要循跡的黑線,因為黑色會吸收光線,而地面是白色的會反射光線,其工作方法:分別在實驗小車的底部安裝左右兩個循跡紅外傳感器檢測黑色跑道。在循跡傳感器的發(fā)光二極管不斷發(fā)射紅外光線時,接收不到返回的信號說明被黑色跑道吸收,并且會輸出高電平;能接收到信號,說明在白色區(qū)域,則輸出低電平。當(dāng)左邊的循跡傳感器檢測不到信號,而右循跡的紅外傳感器檢測得到,則表明左循跡傳感器在黑色跑道上,輪椅已經(jīng)向左偏移了軌道,左車輪壓到黑線上,車應(yīng)往左轉(zhuǎn);反之當(dāng)右邊的檢測不到信號,而左邊的檢測得到,則表明輪椅向左偏離軌道,車右輪壓在黑線上,車應(yīng)往右轉(zhuǎn)。如上判斷輪椅是否按照跑道正常運行,如偏離跑道則能判斷出如何偏離及如何回歸跑道。
2.2 模糊控制算法研究
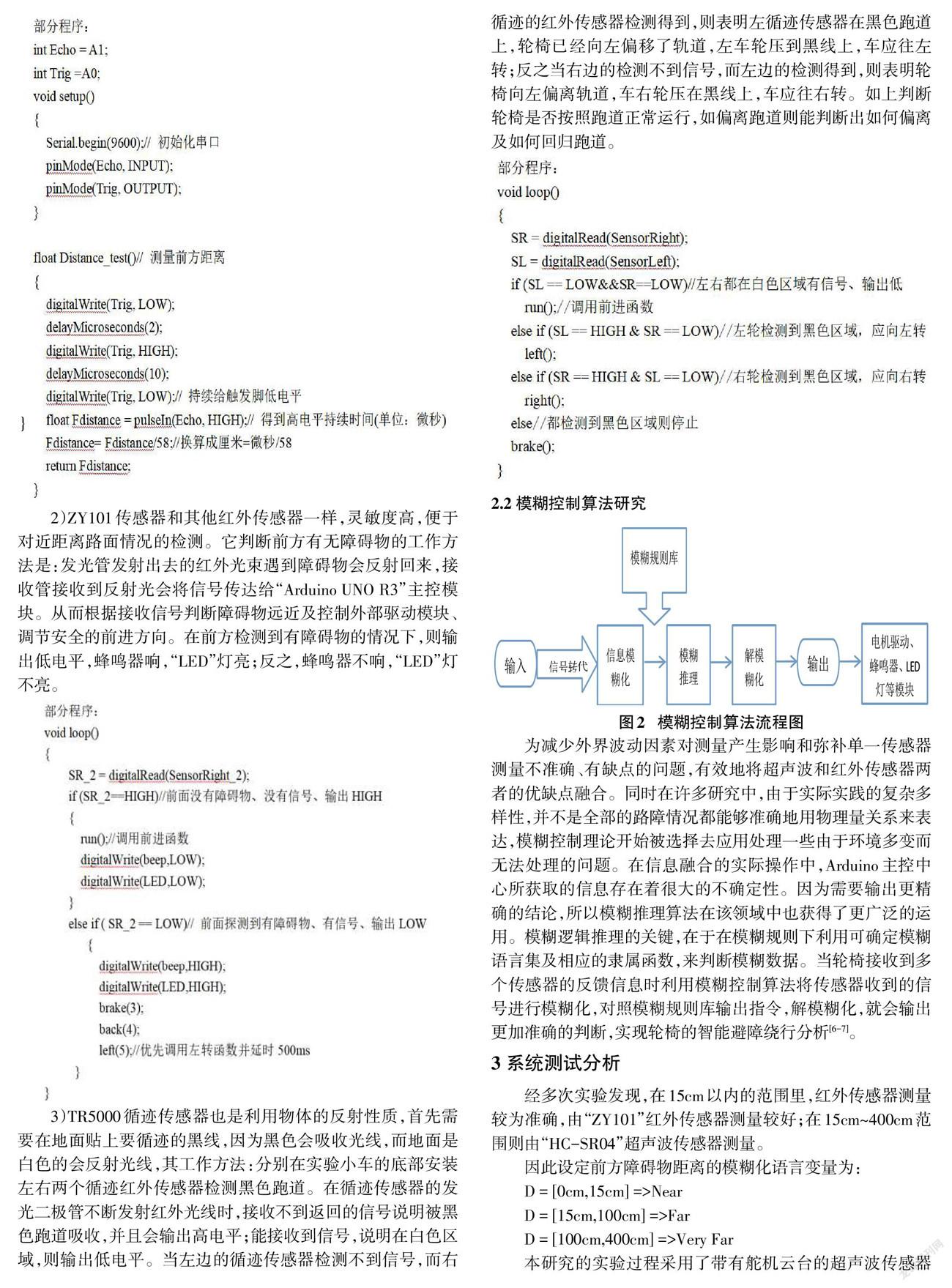
為減少外界波動因素對測量產(chǎn)生影響和彌補單一傳感器測量不準確、有缺點的問題,有效地將超聲波和紅外傳感器兩者的優(yōu)缺點融合。同時在許多研究中,由于實際實踐的復(fù)雜多樣性,并不是全部的路障情況都能夠準確地用物理量關(guān)系來表達,模糊控制理論開始被選擇去應(yīng)用處理一些由于環(huán)境多變而無法處理的問題。在信息融合的實際操作中,Arduino主控中心所獲取的信息存在著很大的不確定性。因為需要輸出更精確的結(jié)論,所以模糊推理算法在該領(lǐng)域中也獲得了更廣泛的運用。模糊邏輯推理的關(guān)鍵,在于在模糊規(guī)則下利用可確定模糊語言集及相應(yīng)的隸屬函數(shù),來判斷模糊數(shù)據(jù)。當(dāng)輪椅接收到多個傳感器的反饋信息時利用模糊控制算法將傳感器收到的信號進行模糊化,對照模糊規(guī)則庫輸出指令,解模糊化,就會輸出更加準確的判斷,實現(xiàn)輪椅的智能避障繞行分析[6-7]。
3 系統(tǒng)測試分析
經(jīng)多次實驗發(fā)現(xiàn),在15cm以內(nèi)的范圍里,紅外傳感器測量較為準確,由“ZY101”紅外傳感器測量較好;在15cm~400cm范圍則由“HC-SR04”超聲波傳感器測量。
因此設(shè)定前方障礙物距離的模糊化語言變量為:
D = [0cm,15cm] =>Near
D = [15cm,100cm] =>Far
D = [100cm,400cm] =>Very Far
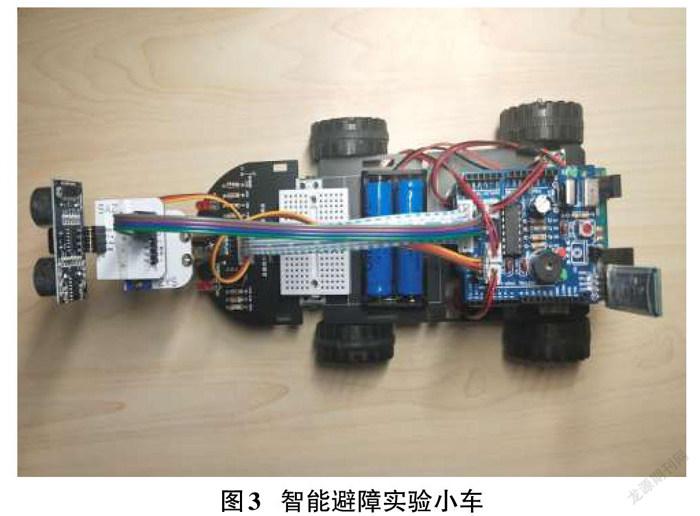
本研究的實驗過程采用了帶有舵機云臺的超聲波傳感器如圖3智能避障實驗小車,可以180度旋轉(zhuǎn)測距,并安裝在輪椅正前方位置;在輪椅底盤左右兩側(cè)分別安裝紅外避障傳感器。同時,根據(jù)超聲波傳感器測量角度范圍設(shè)定舵機搖頭角度右轉(zhuǎn)為正、左轉(zhuǎn)為負、垂直于輪椅的正前方為0度。各方向分別為左方[-135°,-45°],前方[-45°,+45°],右方[45°,135°]。
則有根據(jù)前方障礙物方向和距離來判斷輪椅規(guī)避動作的模糊規(guī)則表[7-10]:
在對控制中心制定好模糊控制規(guī)則、設(shè)定好安全距離后,主控中心將依據(jù)多個傳感器接收的信息,進行模糊決策及非模糊化處理,同時結(jié)合設(shè)定的安全距離選擇最優(yōu)路徑。主控中心將下達最終命令,驅(qū)動電機模塊,控制前后左右輪胎速度,及時做出應(yīng)對動作躲避障礙物或沿著最優(yōu)路徑前進,以此實現(xiàn)輪椅的智能避障功能。
4 總結(jié)及展望
通過對輪椅智能避障功能的研究,初步設(shè)計了包含三種控制模式的智能避障輪椅方案,分別是循跡模式、自動避障模式、紅外遙控模式。本研究根據(jù)多傳感器融合技術(shù)、模糊邏輯控制理論等,實現(xiàn)了殘疾人輪椅智能避障功能的創(chuàng)新研究。由于“ZY101”紅外傳感器檢測范圍不遠、易受自然光的影響和“HC-SR04”超聲波測距模塊會因為測量距離近的情況下產(chǎn)生回波干擾的問題,所以有效地將兩者結(jié)合起來,從而提高測量精度和對環(huán)境感知的準確率。在實際的應(yīng)用場景中,需要根據(jù)系統(tǒng)特性和檢測到的環(huán)境特性物理量進行信息融合。雖然初見成效,但對于適合殘疾人的智能避障輪椅的研究仍是冰山一角,許多問題有待進一步研究,例如動態(tài)避障相比靜態(tài)避障難度更大以及與實際地圖結(jié)合后產(chǎn)生的問題等。隨著新技術(shù)的發(fā)展,殘疾人輪椅智能避障功能會越來越完善,期望未來有更多多元化元素的加入,幫助更多殘疾人使用上更安全、自由的智能避障輪椅。
參考文獻:
[1] 周晶.室內(nèi)智能輪椅自動避障系統(tǒng)研究[D].南京:南京師范大學(xué),2014.
[2] 魯濤,原魁,朱海兵.智能輪椅研究現(xiàn)狀及發(fā)展趨勢[J].機器人技術(shù)與應(yīng)用,2008(2):1-5.
[3] 羅琴.基于Arduino的避障小車設(shè)計與實現(xiàn)[J].黑龍江科學(xué),2017,8(20):24-25.
[4] 張奎.智能輪椅控制系統(tǒng)研究[D].淮南:安徽理工大學(xué),2018.
[5] 李凱,奚夢嬌,陳德勇,等.基于互聯(lián)網(wǎng)技術(shù)的多功能盲人“導(dǎo)航桿”的設(shè)計[J].遼寧科技學(xué)院學(xué)報,2021,23(1):11-13.
[6] 包蓉,祁鏝潼,楊司杰,等.基于多傳感器融合的智能電動輪椅模糊測距控制[J].電子制作,2021(12):68-69,84.
[7] 呂繼亮.基于多傳感器信息融合的無人小車避障算法研究[D].廣州:華南理工大學(xué),2020.
[8] 王戰(zhàn)雷,王喜太,蘇宏倫,等.模糊控制技術(shù)在智能輪椅避障中的應(yīng)用[J].微計算機信息,2007,23(25):35-37.
[9] 張宇婷.基于模糊理論的小車避障應(yīng)用研究[D].西安:西京學(xué)院,2017.
[10] 賈松敏,高立文,樊勁輝,等.模糊神經(jīng)網(wǎng)絡(luò)在智能輪椅避障中的應(yīng)用[J].華中科技大學(xué)學(xué)報(自然科學(xué)版),2013,41(5):77-81.
【通聯(lián)編輯:謝媛媛】
收稿日期:2021-11-08
基金項目:2021年度山東省國家級大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計劃項目:殘疾人輪椅智能避障功能創(chuàng)新研究(項目編號:202113006045);2020年度大學(xué)生專項科研項目:殘疾人輪椅智能避障功能的設(shè)計與研究(項目編號:20YCKYXS14)
作者簡介:王榕(2000—),女,山東煙臺人,本科在讀;趙延浩(2000—),男,山東淄博人,本科在讀;郝智誠(1999—),男,山西呂梁人,本科在讀;陳日莉(1975—),女,山西大同人,通信作者,副教授,碩士,研究方向為物聯(lián)網(wǎng)應(yīng)用、嵌入式系統(tǒng)。
