一種水下探傷機(jī)器人動(dòng)力定位控制方法*
2022-04-07 03:43:08高宏博戴曉強(qiáng)錢金偉朱延栓
計(jì)算機(jī)與數(shù)字工程 2022年3期
高宏博 戴曉強(qiáng) 趙 強(qiáng) 錢金偉 朱延栓
(江蘇科技大學(xué)電子信息學(xué)院 鎮(zhèn)江 212003)
1 引言
水下機(jī)器人(Remotely Operated Vehicle,ROV)在水下作業(yè)過(guò)程中,探傷儀等工具動(dòng)作會(huì)引起自身動(dòng)力學(xué)模型參數(shù)發(fā)生變化[1],其本體也會(huì)受到作用力影響。這種由于模型參數(shù)變化引起的動(dòng)力定位控制精度問題,將直接導(dǎo)致探傷ROV 作業(yè)過(guò)程穩(wěn)定性能差、工作效率低。
針對(duì)上述問題Hussain 等[2]運(yùn)用自適應(yīng)控制和RBF 神經(jīng)網(wǎng)絡(luò)控制相結(jié)合的方法實(shí)現(xiàn)ROV 控制系統(tǒng)設(shè)計(jì),并用仿真證明了系統(tǒng)具有良好的控制信號(hào)收斂性能和跟蹤性能。Heping Liu 等[3]利用神經(jīng)網(wǎng)絡(luò)逼近流體動(dòng)力學(xué)不確定性和擾動(dòng)上限,通過(guò)艏向控制測(cè)試證明了該控制策略的可行性。Li JH 等[4]提出了一種自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制方法,通過(guò)神經(jīng)網(wǎng)絡(luò)對(duì)不確定擾動(dòng)進(jìn)行近似估計(jì),證明了俯仰運(yùn)動(dòng)過(guò)程中的穩(wěn)定性,但是反步法設(shè)計(jì)過(guò)程中存在控制量導(dǎo)數(shù)階數(shù)過(guò)高,計(jì)算量太過(guò)復(fù)雜。王開紅等[5]基于滑模變結(jié)構(gòu)算法設(shè)計(jì)一種水下機(jī)器人控制系統(tǒng),利用神經(jīng)網(wǎng)絡(luò)對(duì)滑模趨近率在線調(diào)整,但未考慮外部環(huán)境干擾等問題且收斂速度較慢。
鑒于以上研究基礎(chǔ)本文首先建立探傷ROV 六自由度運(yùn)動(dòng)模型,并在機(jī)械手展開前后引起的ROV 動(dòng)力學(xué)模型變化進(jìn)行分析;其次給出逼近模型參數(shù)不確定性的神經(jīng)網(wǎng)絡(luò)具體公式,再次設(shè)計(jì)自適應(yīng)滑模控制器,對(duì)控制參數(shù)在線調(diào)整,最后在李雅普諾夫穩(wěn)定性理論下證明系統(tǒng)漸近穩(wěn)定。通過(guò)對(duì)本文研制的探傷ROV 進(jìn)行水池動(dòng)力定位實(shí)驗(yàn)以及金山湖空間運(yùn)動(dòng)實(shí)驗(yàn),驗(yàn)證了本文方法的有效性。
2 ROV動(dòng)力學(xué)模型
以江蘇科技大學(xué)自主研發(fā)的開架式水下探傷ROV 作為研究對(duì)象,建立坐標(biāo)系,如圖1所示,選擇水下探傷機(jī)器人的質(zhì)心作為載體坐標(biāo)系原點(diǎn)。定義水下探傷ROV運(yùn)動(dòng)參數(shù),如表1所示。
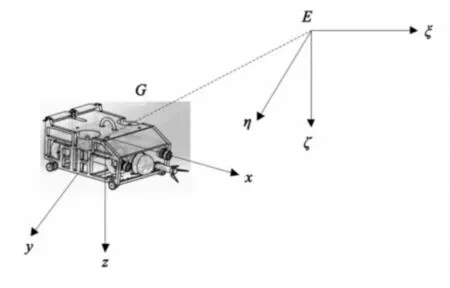
圖1 載體坐標(biāo)系示意圖
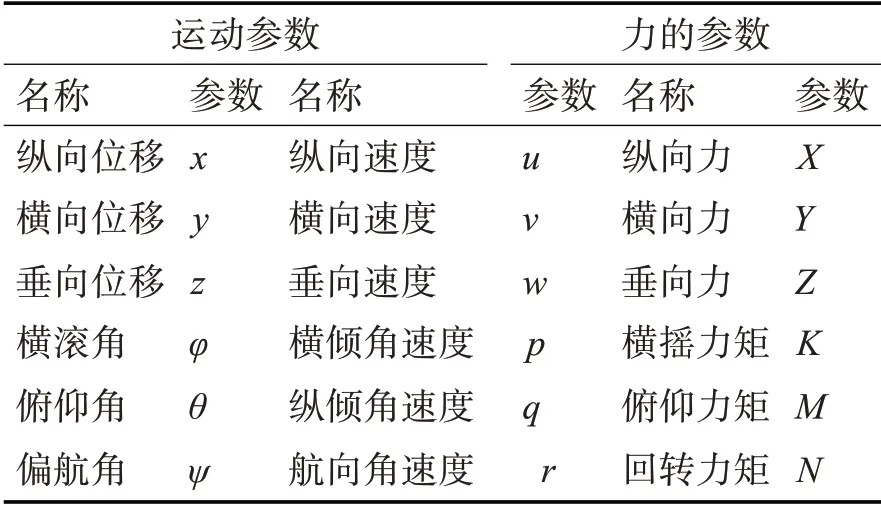
表1 參數(shù)定義
在實(shí)際運(yùn)動(dòng)過(guò)程中,水下機(jī)器人動(dòng)力學(xué)模型可用如下表達(dá)式描述:
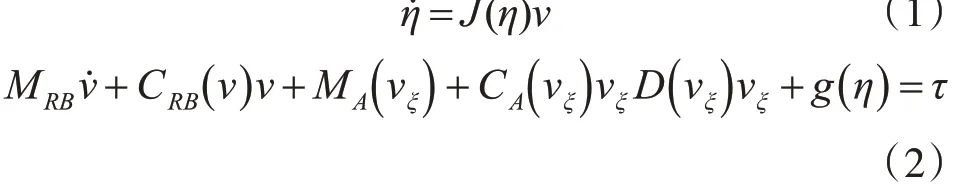
其中η=[x y z φ θ ψ]T,為地理坐標(biāo)系下ROV位置和姿態(tài)角;v=[u v w p q r]T,為ROV 速度矢量;,為坐標(biāo)轉(zhuǎn)換矩陣;MRB為ROV 慣性矩陣,MRB∈R6×6;CRB(v)為科氏向心力矩陣,CRB(v)∈R6×6;MA為外力作用引起的附加慣性矩陣,MA∈R6×6;CA為外力擾動(dòng)下的科氏向心力矩陣,CA(vξ)∈R6×6;D(vξ)為ROV 流體阻力矩陣,D(vξ)∈R6×6;g(η)為 回 復(fù) 力 矩 陣,g(η)∈R6×1;τ為ROV推進(jìn)器提供的推力,τ∈R6×1。
考慮機(jī)械手展開過(guò)程導(dǎo)致的模型參數(shù)不確定項(xiàng)和水流、波浪等未知干擾項(xiàng)帶來(lái)的影響[6]。假設(shè)ξ為環(huán)境干擾力,ξ∈R6×1,vd為地理坐標(biāo)系下伴隨干擾力產(chǎn)生的速度,vξ=v-vd,此處假設(shè)vd為慢時(shí)變的,滿足? ≈0,且C(v)=CRB+CA,則ROV實(shí)際動(dòng)力學(xué)模型應(yīng)調(diào)整為

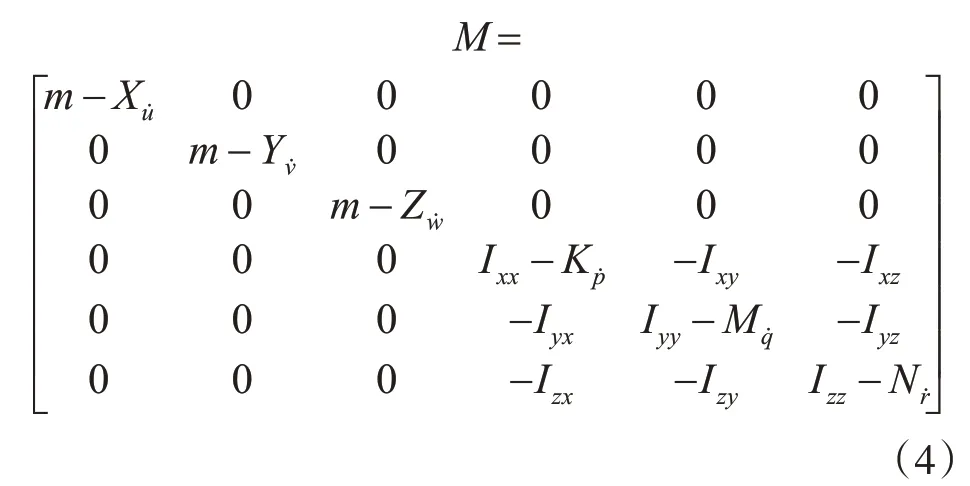
水下探傷ROV 重心xG=yG=zG=0,模型中的慣性矩陣M為
C(v)由科里奧利向心力以及附加質(zhì)量矩陣構(gòu)成,表示為

式中:
流體阻尼力矩陣D(v)表示為

回復(fù)力矩陣g(η)表示為
式中,W、B分別為水下探傷ROV 的重力和浮力,xB、yB、zB為浮心。
通過(guò)對(duì)機(jī)械手作業(yè)前后的ROV 系統(tǒng)動(dòng)力學(xué)模型解耦[7],得到水下探傷機(jī)器人在單個(gè)自由度方向上的動(dòng)力學(xué)模型,在地理坐標(biāo)系中表示為

式中,Mμ為慣性系數(shù),μ為ROV 速度矢量,dμ及dμ||μ表示阻尼常數(shù),gμ表示ROV 豎直方向上的合力分量,τμ表示ROV 在運(yùn)動(dòng)方向上推進(jìn)系統(tǒng)提供的動(dòng)力。
3 ROV動(dòng)力定位控制方法
3.1 RBF網(wǎng)絡(luò)自適應(yīng)滑模控制方法研究
針對(duì)水下探傷機(jī)器人作業(yè)過(guò)程中因波浪干擾和機(jī)械手動(dòng)作引起的ROV模型參數(shù)不確定性[8],進(jìn)而導(dǎo)致的動(dòng)力定位控制精度差等問題,提出一種RBF神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制方法,在李雅普諾夫穩(wěn)定性定理下證明本文提出的控制方法收斂穩(wěn)定。
3.1.1 建立狀態(tài)空間表達(dá)式
在地理坐標(biāo)系下姿態(tài)跟蹤誤差x1、x2,η為ROV當(dāng)前時(shí)刻姿態(tài)信息,ηd為期望姿態(tài)矢量,有如下表達(dá)式:

將ROV 動(dòng)力學(xué)模型轉(zhuǎn)換為2 階非線性被控對(duì)象,通過(guò)該狀態(tài)空間表達(dá)式可將ROV 模型中的不確定性部分和外界干擾構(gòu)成未知項(xiàng)函數(shù)[9~11],方便下一步滑模面設(shè)計(jì)和RBF神經(jīng)網(wǎng)絡(luò)在線逼近。
根據(jù)式(1)、(2)、(11)、(12),建立如下非線性不確定系統(tǒng)的狀態(tài)方程:
式中:

3.1.2 RBF網(wǎng)絡(luò)在線逼近模型參數(shù)和外界干擾
在ROV 實(shí)際作業(yè)過(guò)程中,存在輔助工具動(dòng)作引起的參數(shù)不確定項(xiàng)f(x,t)和其他因素d(t),包括水流、風(fēng)浪等未知不定項(xiàng)。將f(x,t)、d(t)構(gòu)成不定項(xiàng)集合并用F(x,t)表示,通過(guò)神經(jīng)RBF 網(wǎng)絡(luò)對(duì)F(x,t)進(jìn)行在線逼近[12]。其中F(x,t)如下表示:

采用RBF神經(jīng)網(wǎng)絡(luò)逼近F(x,t),表示為
式中,W*T為網(wǎng)絡(luò)理想權(quán)值;?為網(wǎng)絡(luò)逼近誤差。
為了使RBF神經(jīng)網(wǎng)絡(luò)更好地進(jìn)行學(xué)習(xí),采用梯度下降方法分別對(duì)輸出權(quán)值等參數(shù)進(jìn)行迭代[13~14],網(wǎng)絡(luò)的學(xué)習(xí)算法表示為
3.1.3 滑模控制器和自適應(yīng)律設(shè)計(jì)
設(shè)計(jì)滑模面[15~16]為

其中,e=x1-xd為系統(tǒng)跟蹤的實(shí)時(shí)誤差;e?=x2-x?d為變化率;c>0 且為常數(shù)。
將本文設(shè)計(jì)的滑模面進(jìn)行求導(dǎo),同時(shí)將ROV模型轉(zhuǎn)換得到的狀態(tài)空間方程帶入該式得:

設(shè)計(jì)滑模控制率為

將式(23)帶入式(22)可得:

存在 |d(t)|≤D,λ≥D,使得ss?≤0。
RBF 神經(jīng)網(wǎng)絡(luò)的輸出為F?=W?Th(x),帶入式(22)、式(23)可寫為
式中:


3.2 穩(wěn)定性證明
選取Lyapunov函數(shù)為

對(duì)L求導(dǎo),并將?和滑模控制律帶入得:
將自適應(yīng)律帶入式(30)得:

在RBF 網(wǎng)絡(luò)逼近過(guò)程中,?可以足夠小,取λ≥?0+D。存在λ0>0,λ≥λ0+?0+D,使得:

由于L≥0,L?≤0,根據(jù)李雅普諾夫穩(wěn)定性理論可知,ROV 動(dòng)力定位控制系統(tǒng)的跟蹤誤差全局漸進(jìn)穩(wěn)定,并且滑模面和自適應(yīng)律一致穩(wěn)定有界,證明完畢。
4 實(shí)驗(yàn)驗(yàn)證
4.1 ROV樣機(jī)和測(cè)試環(huán)境
本文ROV 樣機(jī)如圖2 所示,測(cè)試環(huán)境如圖3 所示。
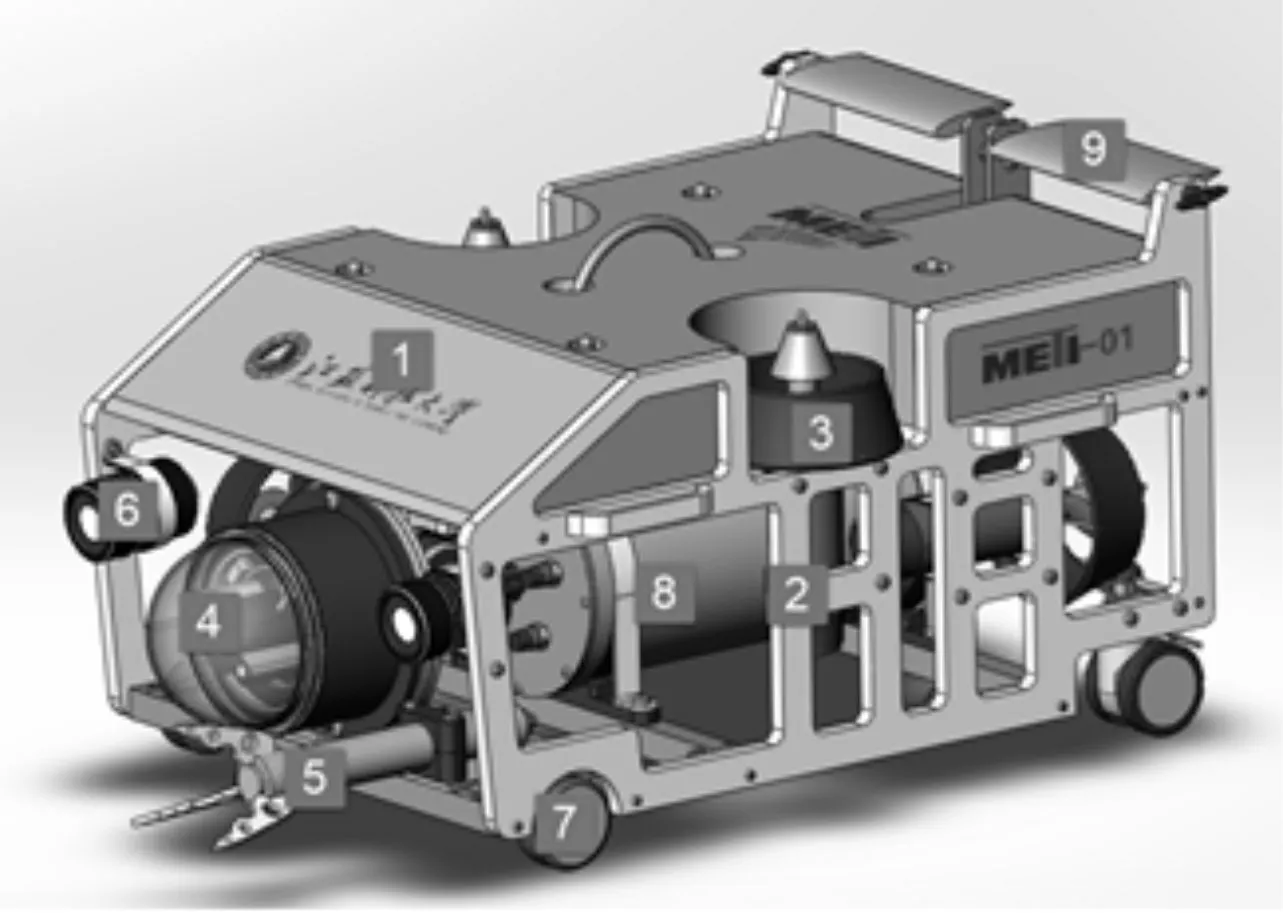
圖2 水下機(jī)器人系統(tǒng)及ROV樣機(jī)
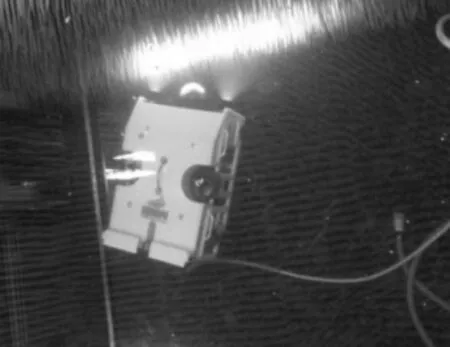
圖3 水池實(shí)驗(yàn)
其中ROV 樣機(jī)為開架式結(jié)構(gòu),實(shí)驗(yàn)水池長(zhǎng)5m、寬5m、深5m,通過(guò)手動(dòng)施加干擾模擬實(shí)際環(huán)境中水流波浪。
4.2 對(duì)比實(shí)驗(yàn)
探傷ROV系統(tǒng)參數(shù)見表2~3。
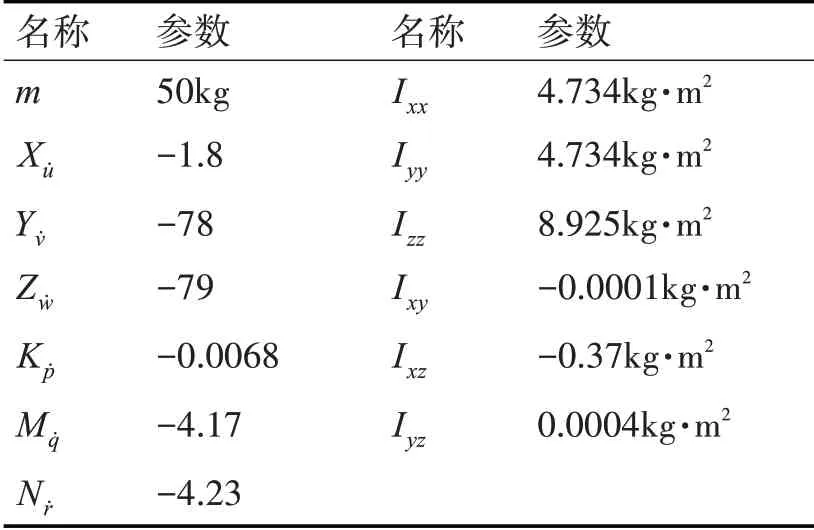
表2 慣性參數(shù)
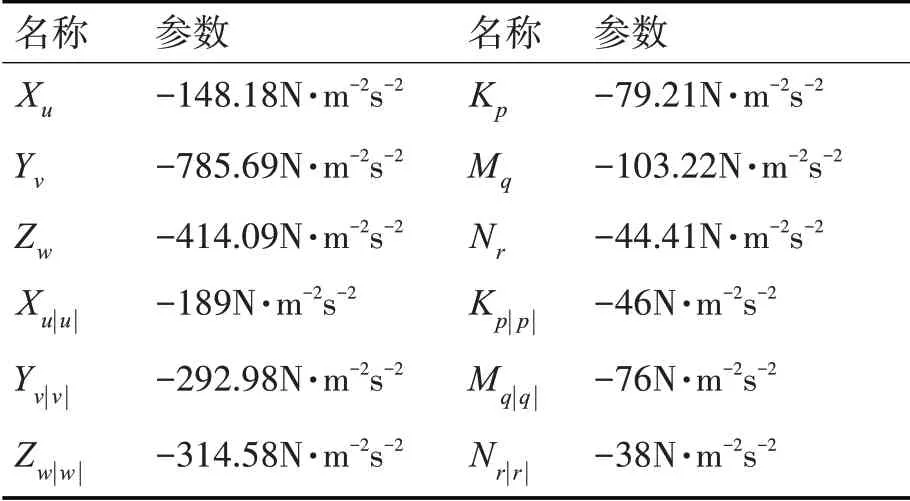
表3 阻尼系數(shù)
探傷ROV 作業(yè)過(guò)程中的主要干擾因素是水流和波浪,通常采用PM譜對(duì)其進(jìn)行分析[17]。
采用如下表達(dá)式描述波浪運(yùn)動(dòng)情況:
式(33)、式(34)中,vwavex、vwavez表示波浪在水平和垂向兩個(gè)自由度上的速度。
4.2.1 艏向、垂向運(yùn)動(dòng)控制實(shí)驗(yàn)驗(yàn)證
分別在平穩(wěn)環(huán)境和存在外部擾動(dòng)情況下,對(duì)艏向上的目標(biāo)軌跡ψ=10 sin( 0.015πt)+50 進(jìn)行跟蹤,實(shí)驗(yàn)結(jié)果如圖4、5所示。
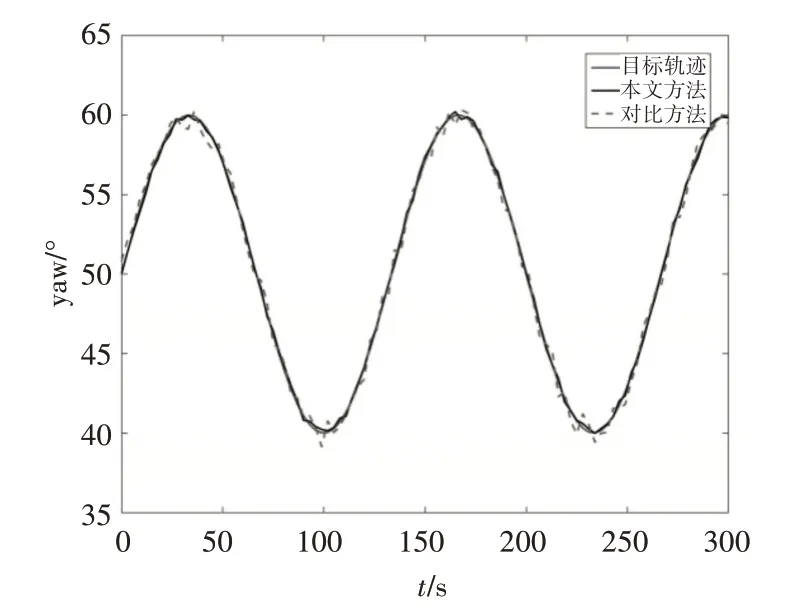
圖4 無(wú)干擾下艏向跟蹤曲線
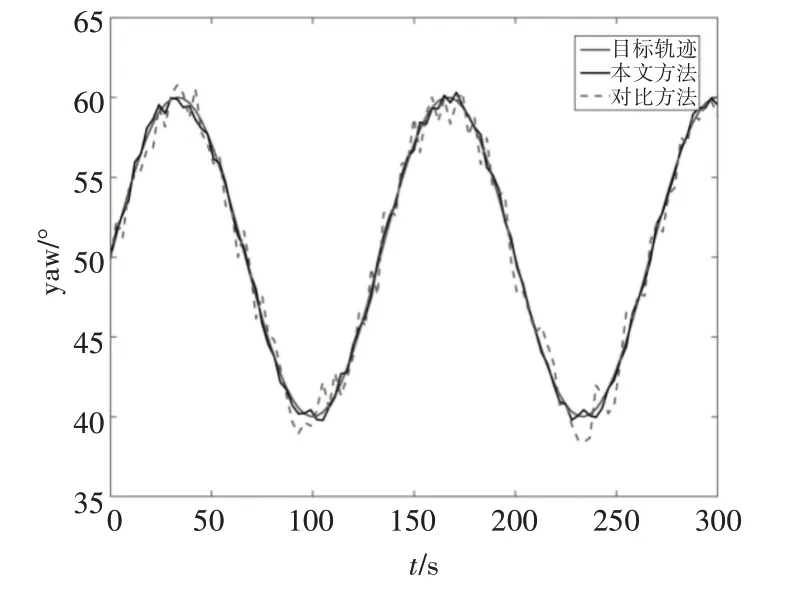
圖5 波浪干擾下艏向跟蹤曲線
分別在平穩(wěn)環(huán)境和存在外部擾動(dòng)情況下,在垂向上對(duì)預(yù)先設(shè)定的深度軌跡進(jìn)行跟蹤,其目標(biāo)軌跡表達(dá)式為H=0.1 sin( )0.03πt+2,實(shí)驗(yàn)結(jié)果如圖6、7所示。
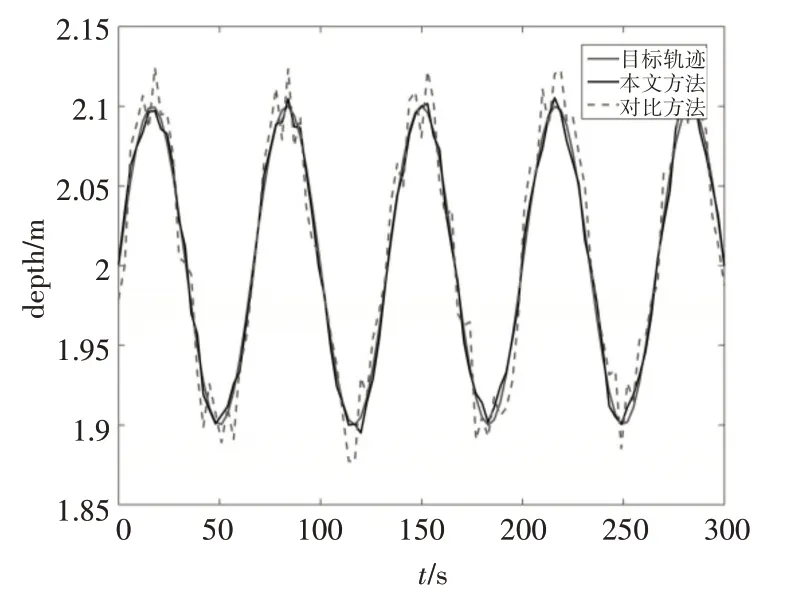
圖6 無(wú)干擾下垂向跟蹤曲線
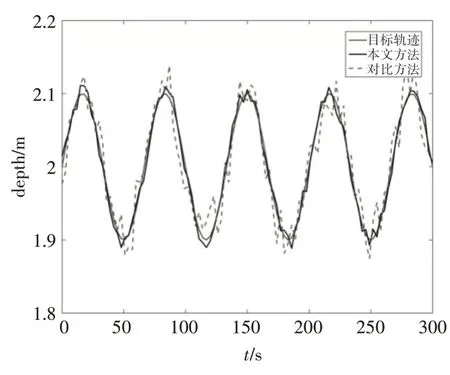
圖7 波浪干擾下垂向跟蹤曲線
水下機(jī)器人在水池內(nèi)的水平方向做轉(zhuǎn)艏及豎直方向做升降運(yùn)動(dòng),能夠按照設(shè)定的軌跡運(yùn)動(dòng)并到達(dá)指定位置。水池測(cè)試實(shí)驗(yàn)結(jié)果如表4所示。
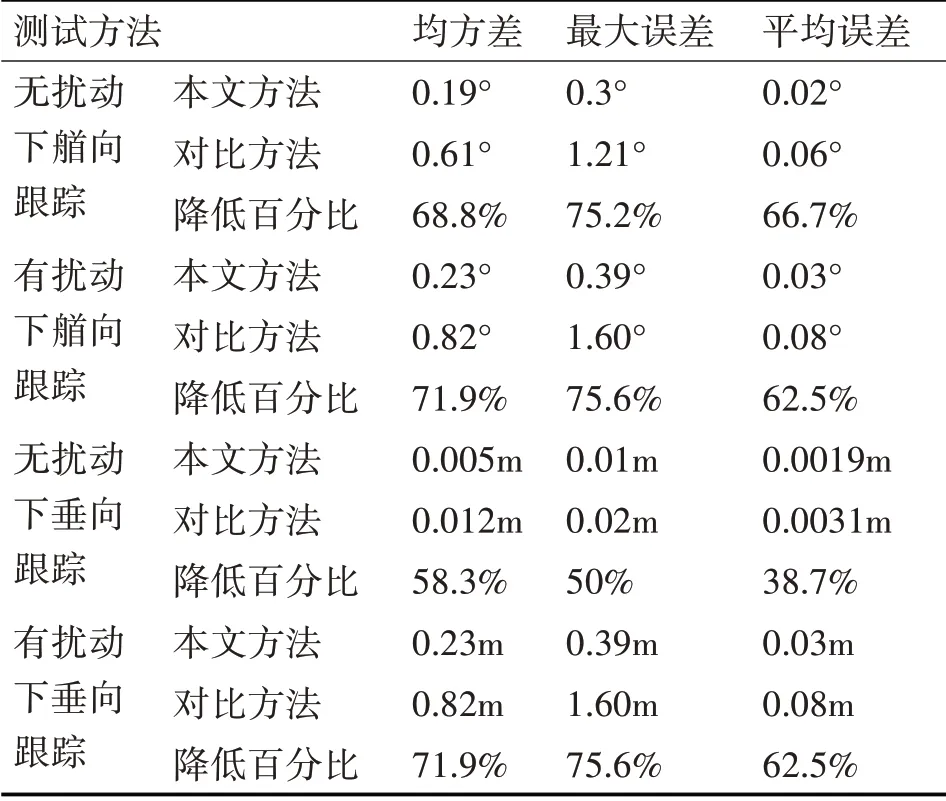
表4 誤差數(shù)據(jù)對(duì)比
在艏向上對(duì)目標(biāo)軌跡進(jìn)行跟蹤,通過(guò)RBF神經(jīng)網(wǎng)絡(luò)對(duì)波浪擾動(dòng)的干擾函數(shù)進(jìn)行在線逼近。存在擾動(dòng)情況下,本文控制方法誤差均方差、最大誤差及平均誤差分別為0.23°、0.39°、0.03°,對(duì)比傳統(tǒng)自適應(yīng)滑模控制方法誤差百分比分別降低71.9%、75.6%、62.5°。在對(duì)垂向軌跡進(jìn)行跟蹤,本文控制方法誤差均方差0.0078m,相比于傳統(tǒng)自適應(yīng)滑模控制方法降低76.4%,最大誤差為0.015m,相比于傳統(tǒng)自適應(yīng)滑模控制方法降低72.2%,平均誤差為0.0021m,相比于傳統(tǒng)自適應(yīng)滑模控制方法降低60.4%。實(shí)驗(yàn)數(shù)據(jù)結(jié)果表明,本文動(dòng)力定位控制方法的效果明顯優(yōu)于傳統(tǒng)自適應(yīng)滑模控制方法。
4.2.2 金山湖定點(diǎn)動(dòng)力定位實(shí)驗(yàn)
水池內(nèi)完成基本運(yùn)動(dòng)控制實(shí)驗(yàn)后,在金山湖完成空間內(nèi)動(dòng)力定位實(shí)驗(yàn),空間內(nèi)軌跡跟蹤如圖8 所示。
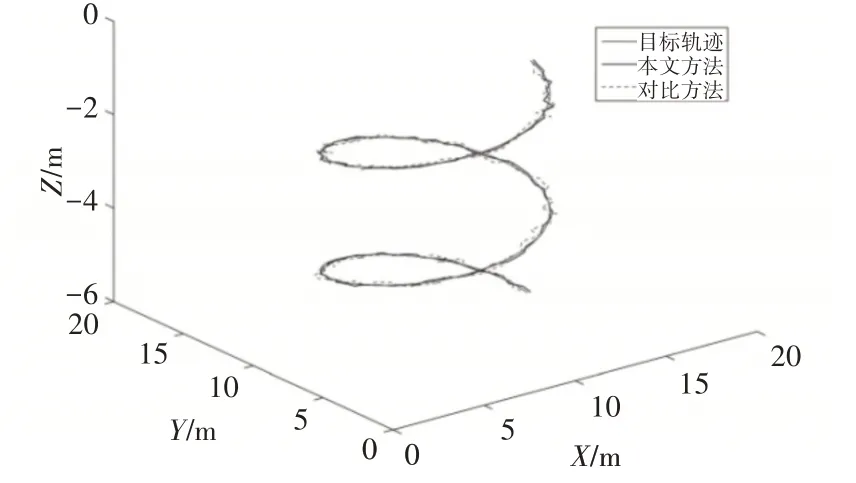
圖8 動(dòng)力定位軌跡
5 結(jié)語(yǔ)
針對(duì)ROV 在實(shí)際過(guò)程中的作業(yè)精度與魯棒性需求,并考慮外部擾動(dòng)引起的模型參數(shù)不確定性問題,提出了一種RBF 神經(jīng)網(wǎng)絡(luò)自適應(yīng)滑模控制策略,通過(guò)RBF神經(jīng)網(wǎng)絡(luò)對(duì)波浪擾動(dòng)的干擾函數(shù)進(jìn)行在線逼近,解決了傳統(tǒng)自適應(yīng)滑模控制在ROV 動(dòng)力定位過(guò)程中軌跡跟蹤精度低和對(duì)外部干擾敏感的問題。最后通過(guò)實(shí)驗(yàn)結(jié)果表明,相比較傳統(tǒng)自適應(yīng)滑模控制方法,本文所提出的動(dòng)力定位控制方法定位誤差小、魯棒性能好。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
