地鐵車站通道行人超越行為改進社會力模型
2022-04-06 14:00:26孔令爭張蕊楊明航楊明輝
科學技術與工程 2022年9期
孔令爭,張蕊,楊明航,楊明輝
(1.北京建筑大學土木與交通工程學院,北京 100044;2.北京建筑大學北京市城市交通基礎設施建設工程技術研究中心,北京 100044;3.北京建筑大學首都世界城市順暢交通協同創新中心,北京 100044)
通道是地鐵車站的重要組成部分,承擔著客流的換乘、集散等功能,行人微觀仿真技術是其合理設計與布局的有效工具。社會力模型[1]具有時空連續等優點,目前被廣泛改進研究并應用[2-3]。
超越行為是中低密度下地鐵單向通道行人主要步行行為之一。社會力模型由于缺乏合理的超越機制,前后行人接近時,后方行人將處于受排斥力降速與受驅動力加速的循環中,導致仿真時無法實現主動超越行為[4]。目前研究主要通過增加超越力或改進驅動力兩種方式來實現主動超越。楊蕊[4]、Yuen等[5]依據行人間水平距離、垂直距離和周圍人流密度等參數構建冪指函數形式的超越力,通過超越力實現主動超越,模型可兼顧超越方向與強度。Jia等[6]考慮行人主動超越時改變期望速度方向并保持期望速度大小的行為特征,將驅動力改變為由前進力、換道力和沖突力組成的合力。Zhang等[7]考慮行人對速度差異敏感程度、最短路徑偏好、社會交通規則等因素確定超越方向,改進了社會力模型。慕建康[8]考慮行人側身方向主動超越問題,對驅動力進行改進。上述仿真建模研究著重分析行人主動超越行為的速度、方向等行為特征以及行人流密度、距離等影響因素,不同程度實現行人的主動超越行為。上述研究的核心是增加橫向力,使后方超越者打破主動超越過程中排斥力降速與驅動力加速的循環,達到主動超越的目的,但以上研究僅對超越部分過程進行研究,未對主動超越完整軌跡的實現和驗證進行關注。與高密度推搡、擠壓等競爭環境下被動避讓不同,主動超越行為由行人自主發起,行人心理特征具有特殊性,并體現在主動超越的不同階段。吳嬌蓉等[9]通過視頻數據提取行人軌跡發現行人具有返回超越前原始步行道的行為特征,導致主動超越行為具有呈分階段拋物線形式的軌跡特征,此行為特征與軌跡特征在上述仿真建模研究中均未被提及和再現。
現以地鐵車站通道內中低密度下的單向行人流為研究對象,通過提取主動超越行人軌跡,分析中低密度下行人主動超越行為的軌跡和心理特征,根據行人主動超越時縱向前進心理、橫向主動換道和邊際效應心理,通過前進力、換道力和邊際力組合構成主動超越驅動力,改進社會力模型,實現行人主動超越行為,同時再現符合實際的主動超越軌跡。
1 行人主動超越行為分析
地鐵通道內服務水平為B級和C級[10],即人均空間2.2~5.6 m2時,行人易發起主動超越。以該密度行人流為研究對象,對北京市某地鐵車站通道行人視頻數據進行分析,獲得主動超越行為樣本195組。
1.1 主動超越軌跡特征
主動超越行為指兩行人行走在同一步行道,后方行人(即超越者)為保持自身較快速度且避免與前方行人(即被超越者)發生碰撞,改變步行道并加速超越前方慢速行人的過程[9]。
主動超越時,超越者與被超越者橫向間距達到最大值Dv1后會返回超越前原始步行道,以橫向距離最大值處為界,超越者前后軌跡差異顯著,將主動超越行為簡化為軌跡偏移和超越結束兩個階段,兩階段軌跡分別呈遠離和靠近被超越者的拋物線,其軌跡特征如圖1所示。
圖1中,后方行人在距前方行人橫向間距Dv0和縱向間距Dh0處開始主動超越。若初始橫向間距較大則無需改變步行道即可完成超越[9]。
超越者與被超越者橫向間距最大值Dv1與行人密度相關,隨行人密度上升呈減小趨勢。超越者與被超越者在橫向間距最大時的縱向間距Dh1與行人縱向速度差、密度均相關,隨密度上升呈波動減小趨勢,表明超越者達到避免碰撞所需橫向空間時,會提前返回超越前原始步行道。不同密度下Dv1、Dh1平均值如表1所示。
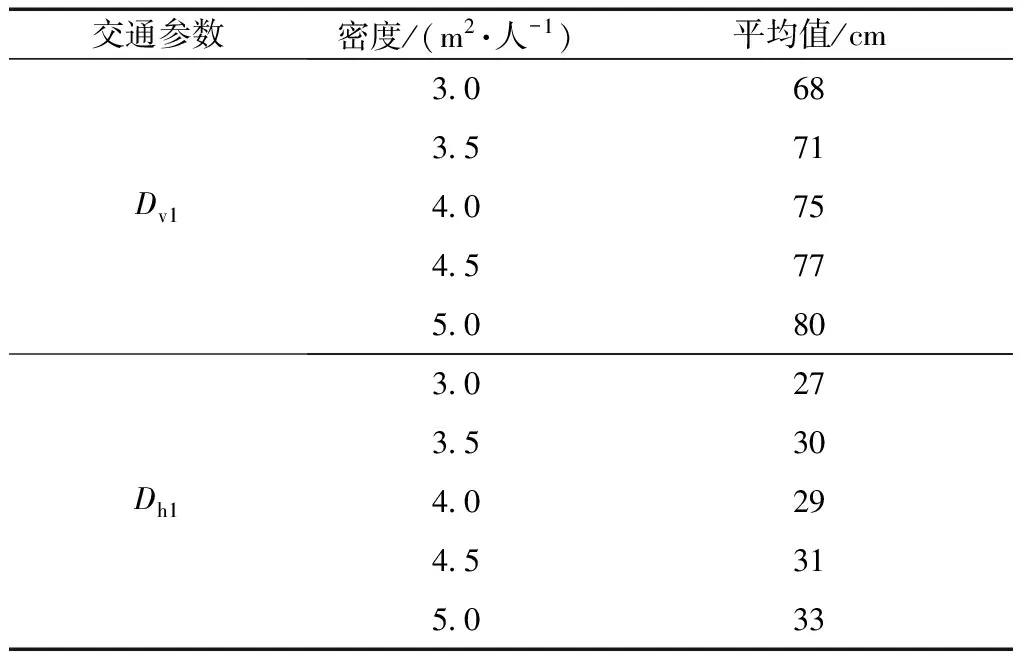
表1 行人超越時位移特征參數
圖1中,Dh2指超越結束時超越者行走的縱向距離,與Dv0、超越者與被超越者縱向上的速度差、橫向間距最大值Dv1均相關,且速度差影響更為顯著。同一密度下,Dh2呈現較大的波動性,平均值為573 cm。
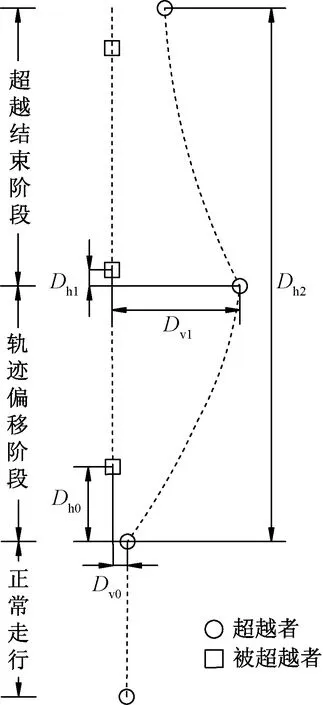
Dv0、Dh0分別為后方行人在距前方行人橫向間距和縱向間距;Dv1為橫向間距達到的最大值;Dh1為橫向間距最大時的縱向間距;Dh2為超越結束時超越者行走的縱向距離
1.2 主動超越心理特征
根據對行人主動超越行為分析,主動超越兩階段行人軌跡呈拋物線狀但有明顯差異,主要是行人主動超越時存在縱向前進、主動換道和邊際效應三方面心理特征導致。
1.2.1 縱向前進心理特征
主動超越時,行人改變步行道時會導致自身縱向位移減小,為避免自身縱向速度降低,行人加大步頻。這時縱向步行速度作為直觀的步行體驗,行人有保持其穩定的心理特征。
經實測,中低密度下行人主動超越時身前空間充裕,步長整體趨于穩定。且為實現主動超越,行人整體步行速度較正常步行增加10%~20%,這時縱向步行速度大小與正常走行時步行速度大小趨于一致。
1.2.2 橫向換道心理
行人為避免與被超越者發生碰撞,主動改變步行道。此心理特征與行人自身屬性相關的空間意識有關,受行人流密度影響,不同行人主動超越時具有不同的最大期望橫向間距,期望橫向間距越大或行人流密度越小,換道心理越強烈,橫向間距最大值Dv1越大。
1.2.3 邊際效應心理
心理學中的邊際效應指主觀感知值增加幅度隨初始目標值的增加而減小[11]。
主動超越過程中,行人考慮遠離或靠近被超越者,初始目標值在軌跡偏移與超越結束兩階段分別為與被超越者在遠離或靠近方向上的期望橫向間距,主觀感知值增加幅度為每一步的橫向位移。
軌跡偏移階段和超越結束階段,隨著與期望橫向間距的遠離或靠近,即初始目標值逐漸增加或減少,行人在邊際效應心理作用下,主觀感知值增加幅度減小或增加,即每一步的橫向位移將減小或增加,導致軌跡偏移階段拋物線軌跡相較步行方向呈凸形,超越結束階段呈凹形。
邊際效應心理受行人自身屬性對橫向間距敏感程度的影響,導致同一密度和同一最大期望橫向間距Dv1下行人具體的超越軌跡存在差異,如圖2所示,行人對距離的敏感程度越大,邊際效應心理越顯著,每一步橫向位移越小,拋物線軌跡切線斜率越大。
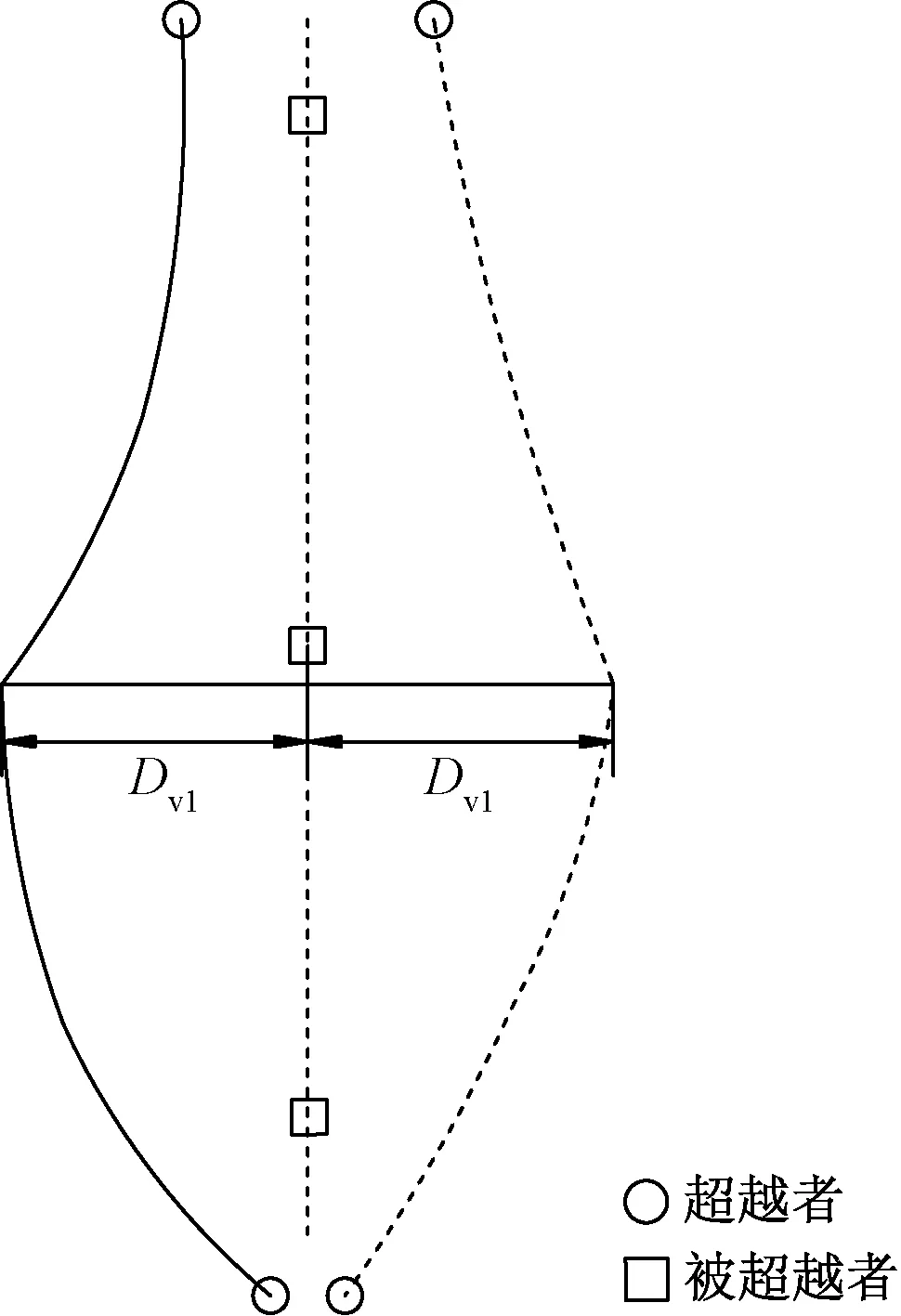
圖2 行人軌跡差異
2 改進社會力模型
(1)
為真實體現行人心理活動,根據縱向前進心理引入前進力,使行人按保持期望速度目標前進,根據主動換道心理引入換道力使行人偏轉走行方向,根據邊際效應心理引入邊際力實現主動超越軌跡。
為再現行人返回超越前原始步行道的行為特征,以邊際力和換道力之差作為行人超越階段變化判斷機制。差值減小表示超越過程中邊際效應心理抵消主動換道心理。當減小至0后,換道力與邊際力改變作用方向,行人由軌跡偏移階段進入超越結束階段。
由前進力、換道力和邊際力組合構成改進驅動力,表達式為
(2)
(1)前進力。根據縱向前進心理特征,行人主動超越時保持自身縱向步行速度大小穩定,前進力表達式為
(3)

(2)換道力。根據主動換道心理特征,行人在改變步行道時受自身最大期望橫向間距及行人流密度的影響,換道力表達式為
(4)
式(4)中:Ci為行人i在橫向上的移動能力,與自身屬性有關,參考文獻[4]研究,取120 N;θiDv為行人i的期望橫向間距強度,為不同行人的期望最大橫向間距與平均最大橫向間距的比值,根據實測數據,不同行人期望橫向間距與期望值存在20%左右差距,取0.8~1.2;θρ為密度強度,根據實測數據,密度值影響行人最大超越橫向間距,行人流密度越大,密度強度越小,取密度強度為0~1;nv為行人i遠離被超越者方向的單位向量。
式(4)表明期望橫向間距和密度強度越大,換道力作用效果越明顯,超越者越容易遠離或靠近原步行道。
(3)邊際力。根據邊際效應心理特征,邊際力在超越開始時緩慢增加,隨著行人橫向位移的增加而急劇增大。邊際力主要受距離因素影響,考慮不同行人對距離的敏感程度存在差異,引入距離敏感因子,邊際力表達式為
(5)
式(5)中:θi為行人i的距離敏感因子,行人對距離越敏感,距離敏感因子越大,根據仿真試算,取距離敏感因子為0.8~1.2;dij為行人i和j之間的橫向間距,m;Bi為邊際力作用范圍,參考文獻[1]研究,取5 m;-nv為行人i靠近被超越者方向的單位向量。
式(5)表明距離敏感因子越大,邊際力作用效果越明顯,超越者越不易遠離或靠近原步行道。
3 模型驗證
為驗證模型有效性,以北京某地鐵車站4 m寬度通道為例進行仿真,該通道不同行人實測速度為0.8~1.4 m/s,流量為2 000人/h。
3.1 基本圖驗證
統計本模型產生速度-密度基本圖,并與該地鐵站實測數據進行對比。實測數據中,行人處于中低密度時,平均速度在1.2 m/s左右,隨著密度增加即行人人均空間增加,行人流速度存在波動情況,總體呈上升趨勢。仿真結果體現了波動上升趨勢,與實測數據具有一致性,如圖3所示。
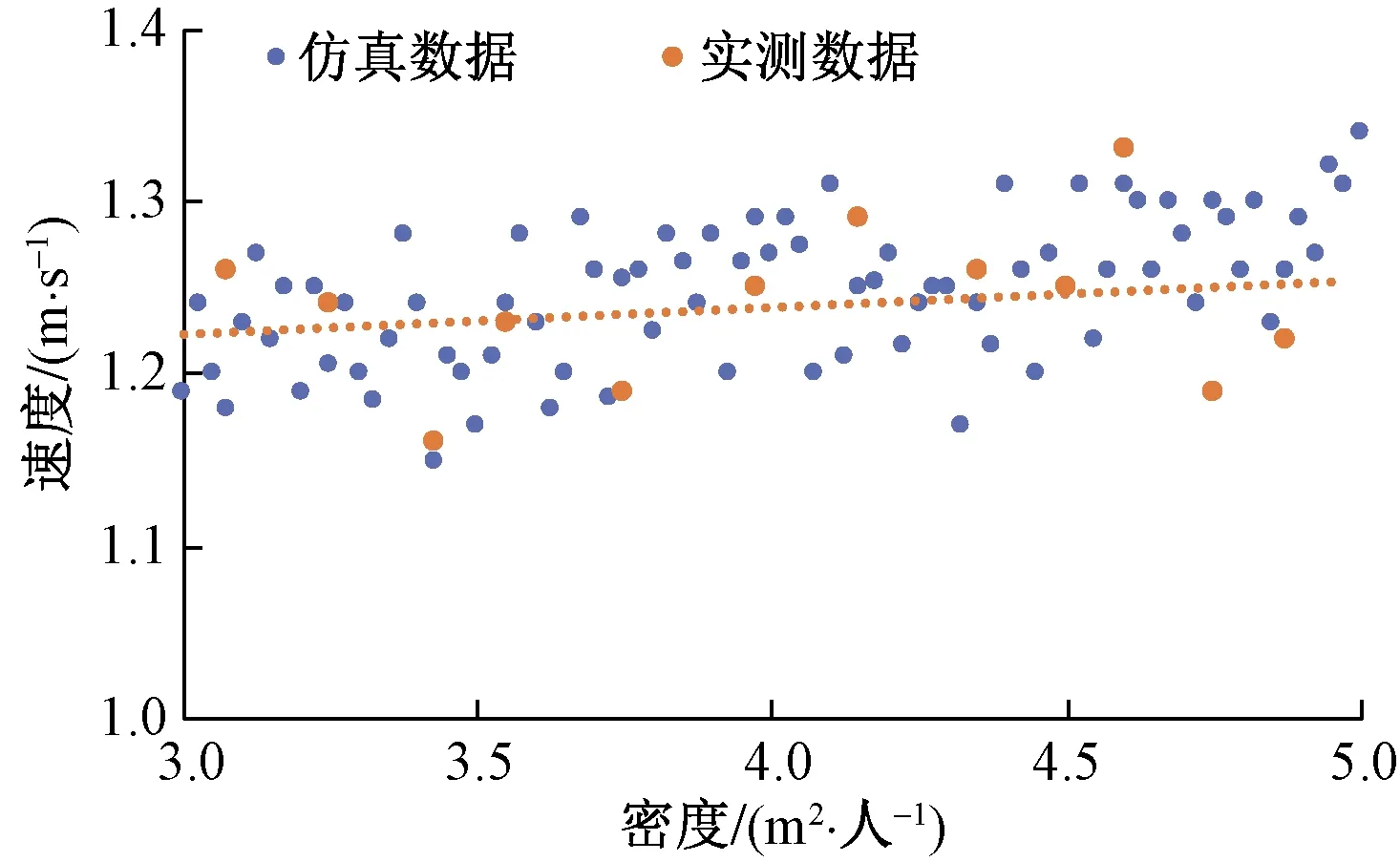
圖3 速度-密度驗證
為進一步比較實測數據與仿真數據間差異,將實測數據與仿真數據以密度0.5 m2/人進行區間劃分,通過等距離抽樣方法在各區間內選取18個實測數據與仿真數據作為檢驗樣本,進行T檢驗,表示實測數據與仿真數據顯著性差異指標Sig(雙尾)值為0.475>0.05,故實測數據與仿真數據基本圖并無顯著性差異。
3.2 超越軌跡驗證
圖4(a)、圖4(b)、圖4(c)的矩形框1中,兩行人水平間距較大,后方行人在接近并超越時沒有改變步行道。圖4(a)矩形框2中,兩行人水平間距較小,后方行人接近前方行人時向前進方向右側改變步行道,進行主動超越,圖4(b)矩形框2中,超越者達到與被超越者橫向間距的最大值且與被超越者存在一定的縱向間距。圖4(c)矩形框2中,行人返回超越前原始步行道。圖4(b)和圖4(c)的矩形框3中,后方行人向前進方向右側改變步行道進行主動超越。
根據仿真輸出的圖4矩形框2內兩行人坐標,得到主動超越軌跡圖,如圖5所示。后方行人的主動超越軌跡在軌跡偏移和超越結束兩階段內均呈拋物線狀。Dv1為77 cm,Dh1為27 cm,超越者達到避免接觸所需空間后提前返回超越前原始步行道。

圖4 超越行為驗證
由圖4和圖5可見,后方行人進入Dh0和Dv0間距范圍后進入軌跡偏移階段,改變步行道,在未完全超越時進入超越結束階段,返回超越前原始步行道。改進社會力模型實現了具有返回超越前原始步行道行為特征的主動超越行為,再現了呈分階段拋物線形式主動超越軌跡。
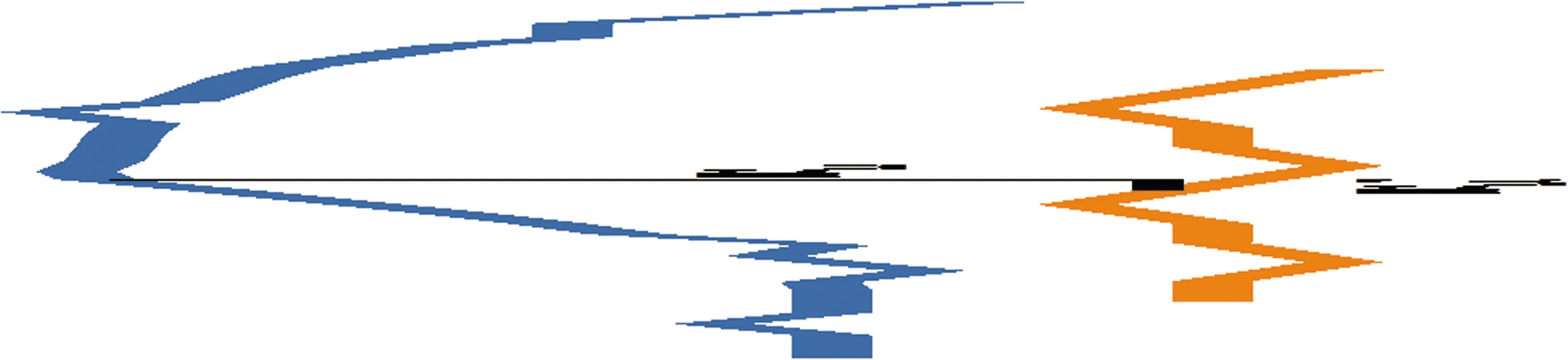
圖5 仿真主動超越軌跡
3.3 超越行為驗證
由于實地調查所得Dh2呈現極大波動性,選取Dv1、Dh1仿真數據驗證模型的準確性。
通過仿真數據,選取3.0、3.5、4.0、4.5、5.0 m2/人5個不同密度時行人主動超越時Dv1、Dh1平均值與實測值進行對比分析,誤差在15%左右,仿真結果與實測數據具有一致性,如表2和表3所示。
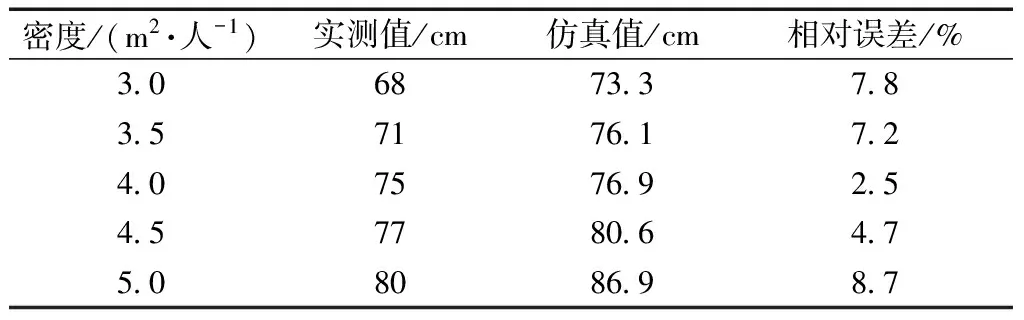
表2 Dv1仿真誤差分析
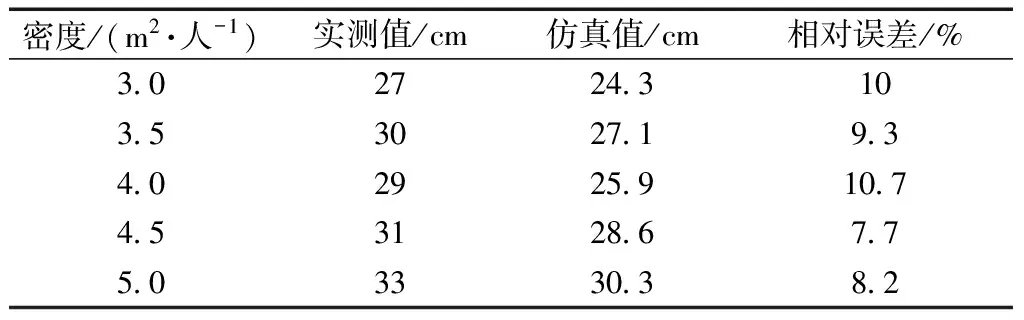
表3 Dh1仿真誤差分析
4 結論
(1)通過提取行人軌跡,總結、分析行人主動超越時位移、軌跡和心理特征。改進驅動力模型,依據地鐵換乘通道實測數據進行參數標定,按實際環境搭建仿真模型,通過基本圖、超越軌跡、超越行為驗證了模型的有效性。結果表明,改進社會力模型實現了行人主動超越行為,再現了符合實際的主動超越軌跡。
(2)行人的走行行為復雜、多變,特定場景或不同密度下的行人流具有不同的特征,本文未考慮如結伴等行人間普遍行為影響,也不適用于實際生活中普遍存在的高密度和對向行人流和商場、醫院等行人密集區域大量存在的多向行人流。今后需要進一步分析研究、提煉總結行人位移、軌跡和心理特征,據此完善社會力仿真模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少兒美術·書法版(2021年8期)2021-10-20 06:08:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
甘肅教育(2020年22期)2020-04-13 08:10:56
陶瓷科學與藝術(2019年10期)2019-12-18 05:37:20
中國生殖健康(2019年11期)2019-01-07 01:27:56
中國篆刻(2017年6期)2017-07-18 11:09:54
光學精密工程(2016年6期)2016-11-07 09:07:19
中國衛生質量管理(2015年4期)2015-12-01 05:44:21
