基于網絡光纖通信的光斑定位算法研究
2022-04-03 13:18:30劉建友
黑龍江科學 2022年6期
關鍵詞:實驗
劉建友
(廣東理工學院,廣東 肇慶 526100)
光斑中心定位是一種激光光斑能量中心位置的精確定位技術,是光學測量中常用的關鍵技術,在激光通信、目標跟蹤、武器系統、激光雷達、激光測距等領域有著廣泛的應用[1]。光纖通信激光通過載體后會出現畸變光斑,其以光束漂移、發散、光強度起伏為主要特征,如果能夠快速找出成像光斑中心,將成為解決網絡光纖通信問題的核心技術。精確度高的光斑定位算法可以在通信鏈路不斷開的情況下減少促動位移,降低頻率,提高系統工作效率。目前常用的幾種光斑定位算法有質心法、形心法、橢圓擬合法、高斯擬合法等,在這些算法的基礎上通過實驗,提出了滑動加權質心定位算法,為提高網絡光纖通信光斑中心的準確定位提供了理論基礎和實驗數據。
1 滑動加權質心定位算法
1.1 算法概述
用閾值分割方法來定位光斑,將最短時間內的圖像定為標準圖像,去除光斑周圍噪聲,同時對中心進行補償,用非線性權重質心定位算法進行粗定位,再用向量滑動補償粗定位中心,進行精確定位。
1.2 閾值分割方法
閾值選取得當可以減少周圍噪聲干擾,可以在減少計算量的同時提高準確性。自適應閾值法[2]簡單好用,在此方法的基礎上稍微改動,其算法公式如公式(1)和公式(2):
(1)
V=Ravg+M1
(2)
其中,H是起始圖像,V為閾值結果,Ravg為圖像灰度均值,M1為圖像灰度眾數。
通過實驗對比了閾值分割方法、最大類間方差法和迭代法,這三種方法都采用了非線性加權重心算法和重心算法,得出的結果如表1所示:

表1 不同算法下定位點離標準中心偏移量(像素)Tab.1 Offset (pixel) of anchor point from standard center under different algorithms
由表1可以看出,眾數自適應閾值分割方法相較于其他方法,光斑在非線性權重質心定位算法及質心法下的中心定位精度都得到了很大的提高。
1.3 滑動加權質心定位算法
滑動加權質心定位算法具有抗噪聲性能好、精度高、對規則光斑和畸變光斑的定位穩定性強等特點。其算法過程如下:第一步是處理圖像。將拍攝的彩色圖像轉化為灰度強度圖像輸入。第二步是疊加圖像。通過參考圖像B的閾值VB計算出其對應的灰度值K,由公式(3)計算出去背景處理后的圖像。第三步是中心補償。經過以上操作光斑已經失真,為了保持圖像數據有效,必須把中心去除的背景噪聲補償進去。第四步中值濾波。把圖像按像素值的大小進行排序,用點周圍點值的中值去代替點值,計算如公式(4)。第五步是運算處理。目的是使光斑面積邊緣光滑,細小空洞填滿。
I去背景(i,j)=I當前值(i,j)-k
(3)
J(x,y)=med{IA(x-k,y-l),(k,l∈w)}
(4)
經過上述五步之后,得到了當前的圖像值。實驗中的兩條光纖通信光斑通過上述操作后得到結果如表2所示:

表2 光斑處理過程效果分析Tab.2 Effect analysis of light spot processing
由表2可以看出,運行2處理的結果比運行1好,用峰值信噪比處理噪聲效果更好。
定位算法過程是先用非線性權重質心法對圖像進行粗定位,得到點坐標為(xs,ys),由光斑移動向量r對粗定位點進行反向補償,得到精定位點坐標(xn,yn)。計算如公式(5)所示。
(xn,yn)=(xs,ys)-(xi-xi-1,yi-yi-1)
(5)
滑動加權質心定位算法保留了非線性權重質心定位算法對于規則光斑定位精度高的優點,通過滑動補償機制,盡可能減小通信中由于光斑閃爍漂移帶來的定位誤差,彌補了其對畸變光斑定位穩定性差的問題[2]。
2 算法理論分析
2.1 不同強度下的光斑分析
使用功率譜反演法模擬光斑撲捉屏,用以撲捉不同強度的光斑,為了更接近理論值,對撲捉屏進行了次諧波補償,從理論上把撲捉屏的相位結構函數和理論值進行比較,得到圖1,其中p為諧波次數,圖中縱坐標r0為光斑有效直徑。
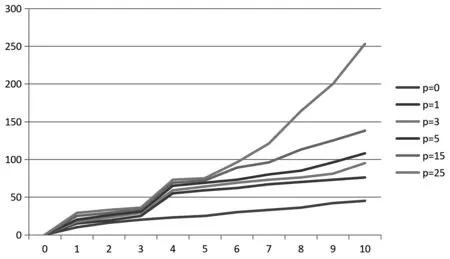
圖1 不同強度光斑理論分析Fig.1 Theoretical analysis of light spot of different intensity
2.2 理論定位分析
在強度為2×10-17m-2/3、2×10-15m-2/3、2×10-13m-2/3下形成的像素為512×512的光斑中加進了不同強度的噪聲,用滑動加權質心定位算法、非線性權重質心定位算法、質心法、傳統形心法得到定位點到光斑中心的均值。以定位點為圓心,光斑圖像大小及光斑尺寸取半徑,得到圖2。
由圖2可以看出,光的功率越大,光斑的定位就越精確,滑動加權質心定位算法相較其他三種方法,在定位的精確度和穩定性上都是最好的。

圖2 Fig.2
3 算法實驗驗證分析
本實驗分別在2.5 km和10.3 km的距離搭建了光纖通信鏈路,光纖通信通過放大器進行放大,再通過開普勒透射式天線發出,接收器是馬卡斯托折返式望遠鏡。實驗中對接收器中的光斑進行了提取和補償[3],采用滑動加權質心定位算法、非線性權重質心定位算法、質心法、傳統形心法對其進行定位,說明了光斑強度越大,定位精確度就越好,定位點之間的距離越短,定位算法穩定性就越好。圖3是10.3 km中50張連續光斑取半徑為30、60像素強度在4種算法中的值。圖中縱坐標表示像素強度,橫坐標表示圖像數量,表3為10.3 km光斑數據處理結果。

圖3 不同算法下10.3 km 50張光斑圖像取不同半徑像素強度Fig.3 50 pieces of 10.3 km light spot image of different radius pixel strengths under different arithmetics
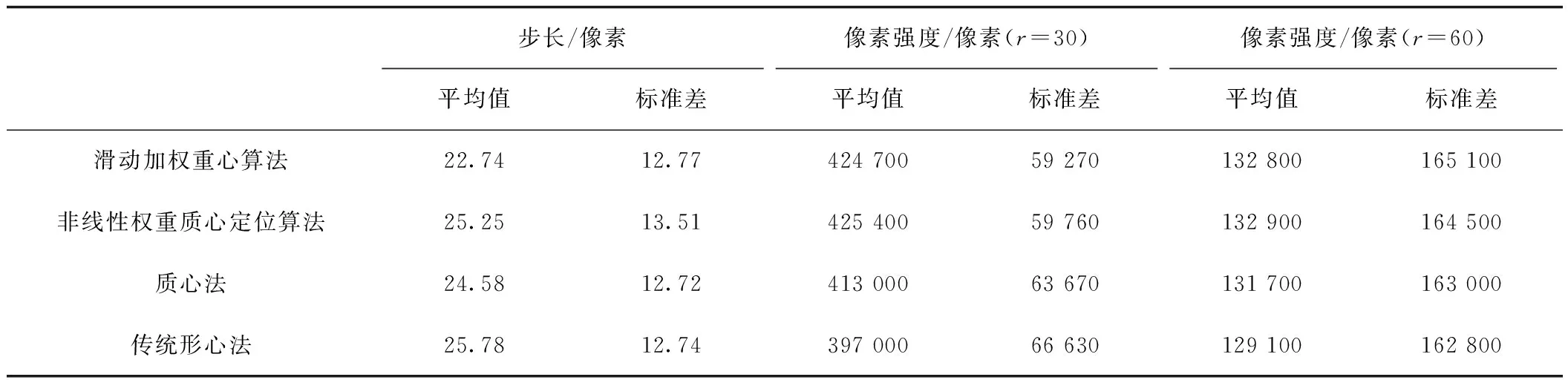
表3 10.3 km光斑數據處理結果Tab.3 Data processing esults of 10.3 km light spot
從圖表中可以看出,滑動加權重心算法在平均值和標準差上相較于其他幾種方法,它們的值雖然都在同一數量級上,但是都稍微偏大一點,這說明滑動加權重心算法的穩定性和精確度更好。實驗中距離為2.5 km的實驗數據也得出了相同的結論。
4 結論
通過理論和實驗,對比了光纖通信光斑的滑動加權質心定位算法、非線性權重質心定位算法、質心法、傳統形心法等,提出在滑動加權質心定位算法中引入補償機制對光斑的定位精確度和穩定性都有了一定的提高,但受到算法中圖像漂移和光斑圖像隨機性等因素的影響,理論值比實驗值定位的效果更好。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
