LSSVM增強(qiáng)的受限環(huán)境列車定位精度優(yōu)化方法
2022-04-01 08:03:38余義志蔡伯根
鐵道學(xué)報(bào) 2022年1期
姜 維,余義志,蔡伯根,王 劍
(1.北京交通大學(xué) 電子信息工程學(xué)院, 北京 100044;2.北京交通大學(xué) 軌道交通控制與安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100044;3.北京市電磁兼容與衛(wèi)星導(dǎo)航工程技術(shù)研究中心,北京 100044)
列車定位技術(shù)在鐵路運(yùn)營(yíng)的安全及效率方面起著至關(guān)重要的作用。隨著科學(xué)技術(shù)的發(fā)展與創(chuàng)新,列車導(dǎo)航定位的技術(shù)手段也有了更多的選擇,目前全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System, GNSS)與慣性導(dǎo)航系統(tǒng)(Inertial Navigation System, INS)所組成的組合導(dǎo)航系統(tǒng)是較為常用的定位組合方式,兩種不同系統(tǒng)的性能優(yōu)缺點(diǎn)能夠有效實(shí)現(xiàn)互補(bǔ)。
慣性導(dǎo)航系統(tǒng)是一種自主性導(dǎo)航系統(tǒng),具有較強(qiáng)的抗干擾性,不同于里程計(jì)、多普勒雷達(dá)等設(shè)備,INS不僅可以計(jì)算列車運(yùn)行的前向速度,還可以通過(guò)計(jì)算列車當(dāng)前的姿態(tài)信息將列車當(dāng)前的速度轉(zhuǎn)換到導(dǎo)航坐標(biāo)系下,從而能夠得到東向、北向和天向的速度,但是由于INS內(nèi)部器件自身的特性,加速度計(jì)和陀螺儀所計(jì)算出來(lái)的位置以及姿態(tài)信息的誤差會(huì)逐漸累積而發(fā)散,因此INS不能提供較長(zhǎng)時(shí)間的精確定位信息[1]。為彌補(bǔ)INS的缺陷,選取能夠長(zhǎng)時(shí)間提供精確位置信息的GNSS與INS進(jìn)行組合,從而能夠較大程度的提高系統(tǒng)的定位性能。但是GNSS的信號(hào)容易受到干擾,在列車經(jīng)過(guò)隧道、橋梁和高山等環(huán)境時(shí)GNSS信號(hào)會(huì)中斷,組合導(dǎo)航系統(tǒng)的定位精度會(huì)大大降低。為了解決GNSS/INS組合導(dǎo)航系統(tǒng)中GNSS容易中斷的缺陷,國(guó)內(nèi)外學(xué)者已經(jīng)提出了許多方案。Bhatt等[2]提出了一種基于知識(shí)的源差異人工神經(jīng)網(wǎng)絡(luò)(SDANN)用于預(yù)測(cè)在GNSS信號(hào)中斷情況下INS的誤差,結(jié)果表明該方法能夠大大改善INS單獨(dú)定位的誤差發(fā)散的問(wèn)題。Li Z等[3]提出了一種使用模糊神經(jīng)網(wǎng)絡(luò)(FNN)來(lái)輔助GNSS/INS/里程計(jì)組合導(dǎo)航系統(tǒng)的方法,能夠提組合導(dǎo)航系統(tǒng)的定位精度。文獻(xiàn)[4]采用多傳感器進(jìn)行組合導(dǎo)航,并且在BDS/INS/里程計(jì)組合的基礎(chǔ)上利用地圖匹配的方式對(duì)結(jié)果加以校正,能夠保證列車在隧道、橋梁和高山等衛(wèi)星信號(hào)遮蔽條件下的定位精度。
從各類相關(guān)文獻(xiàn)中可以總結(jié)出,在GNSS信號(hào)缺失的情況下需要借助學(xué)習(xí)類的算法或者額外的設(shè)備對(duì)INS進(jìn)行相應(yīng)的校正。但是增加額外的設(shè)備則會(huì)增加成本和算法的復(fù)雜性,神經(jīng)網(wǎng)絡(luò)則需要數(shù)量理想且質(zhì)量適合的數(shù)據(jù),在列車實(shí)際運(yùn)行的現(xiàn)實(shí)情況下該條件較難滿足,并且由于在列車組合導(dǎo)航系統(tǒng)運(yùn)行過(guò)程中的數(shù)據(jù)有限,使用神經(jīng)網(wǎng)絡(luò)易出現(xiàn)過(guò)度學(xué)習(xí)的現(xiàn)象。
為此本文將結(jié)合鐵路運(yùn)行的實(shí)際需求,針對(duì)在列車正常行駛過(guò)程中經(jīng)過(guò)隧道、高山等環(huán)境時(shí)GNSS信號(hào)會(huì)受到遮蔽,GNSSNS組合導(dǎo)航系統(tǒng)中的INS遞推所產(chǎn)生的累積誤差無(wú)法進(jìn)行修正的問(wèn)題,提出了一種LSSVM增強(qiáng)的受限環(huán)境列車定位精度保持方法,對(duì)INS單獨(dú)導(dǎo)航時(shí)的誤差進(jìn)行校正,保證在隧道、高山等特殊環(huán)境下GNSS信號(hào)被遮蔽時(shí)的列車定位精度。
1 GNSS/INS組合定位系統(tǒng)
在GNSS/INS組合導(dǎo)航系統(tǒng)中,兩種不同系統(tǒng)的性能優(yōu)缺點(diǎn)能夠有效的互補(bǔ)[5],GNSS和INS提供的速度、位置信息作為組合濾波器的輸入,INS的導(dǎo)航信息經(jīng)過(guò)濾波器誤差校正之后作為系統(tǒng)的導(dǎo)航輸出。本文所采用的是基于卡爾曼濾波的松組合導(dǎo)航系統(tǒng)[4]。
1.1 慣導(dǎo)力學(xué)編排
INS能夠提供較高頻率的載體加速度、角速度信息,通過(guò)航位推算可以得到載體相應(yīng)的速度、位置、姿態(tài)信息, 并且具有較強(qiáng)的抗干擾性[6]。
(1)
式中:θ、ψ、φ分別為俯仰角、偏航角、翻滾角。在本文中載體系統(tǒng)b采用的是右前下坐標(biāo)系;導(dǎo)航系統(tǒng)n采用的是北東地坐標(biāo)系。
載體的姿態(tài)矩陣通過(guò)四元數(shù)進(jìn)行更新,其微分方程為
(2)

列車的速度信息可以通過(guò)對(duì)INS中加速度計(jì)測(cè)量的加速度進(jìn)行積分得到,位置信息可以通過(guò)速度信息和陀螺儀測(cè)量計(jì)算的角度信息計(jì)算得出[7]。位置和速度的計(jì)算式為
(3)
(4)
1.2 GNSS/INS組合模型
為彌補(bǔ)INS誤差會(huì)逐漸累積的缺陷[8],使用GNSS與INS進(jìn)行組合,GNSS、INS計(jì)算得出的速度、位置信息作為卡爾曼濾波的輸入信息,經(jīng)過(guò)卡爾曼濾波的計(jì)算得到INS各項(xiàng)參數(shù)的矯正量,能夠?qū)NS的位置、速度、姿態(tài)信息進(jìn)行相應(yīng)的校正,校正后的導(dǎo)航信息作為整個(gè)組合導(dǎo)航系統(tǒng)的結(jié)果進(jìn)行輸出。
GNSS/INS系統(tǒng)的狀態(tài)向量XGNSS/INS為
XGNSS/INS=[δψδpnδvnδξgδξa]
(5)
式中:δψ、δpn、δvn、δξg、δξa分別為三維的姿態(tài)誤差、位置誤差、速度誤差、陀螺儀誤差、加速度計(jì)誤差。
利用離散卡爾曼濾波進(jìn)行計(jì)算時(shí)的狀態(tài)方程和量測(cè)方程為
X(k)=Φ(k)X(k-1)+W(k)
(6)
Z(k)=H(k)X(k)+V(k)
(7)

離散卡爾曼濾波的更新步驟為

(8)
P(k|k-1)=Φ(k)P(k-1)ΦT(k)+Q(k)
(9)
K(k)=P(k|k-1)HT(k)·
(10)

(11)
P(k)=[I-K(k)H(k|k-1)]P(k|k-1)
(12)
本文所用的觀測(cè)矩陣H為
(13)
組合導(dǎo)航系統(tǒng)的測(cè)量矩陣ZGNSS/INS為
(14)
式中:PGNSS為由GNSS計(jì)算出的位置信息;PINS為由INS計(jì)算出的位置信息;vGNSS為由GNSS計(jì)算出的速度信息;vINS為由INS計(jì)算出的速度信息。
測(cè)量噪聲協(xié)方差R設(shè)置為
(15)
式中:前3個(gè)量為位置協(xié)方差,m2;后3個(gè)量為速度協(xié)方差,(m/s)2。
2 LSSVM增強(qiáng)的列車定位精度保持方法
2.1 LSSVM模型
機(jī)器學(xué)習(xí)已被廣泛應(yīng)用于各種領(lǐng)域,其中LSSVM通過(guò)數(shù)據(jù)集的訓(xùn)練能夠有效地獲取輸入與輸出數(shù)據(jù)之間的模糊關(guān)系,相比于神經(jīng)網(wǎng)絡(luò)具有更加嚴(yán)格的理論基礎(chǔ)[9]。LSSVM避免了神經(jīng)網(wǎng)絡(luò)求解的困難以及容易陷入局部最優(yōu)進(jìn)而導(dǎo)致訓(xùn)練失敗的缺點(diǎn),可以較容易地得到全局最優(yōu)解[10-11],被廣泛應(yīng)用于數(shù)據(jù)的分類、回歸分析和預(yù)測(cè)。本文主要用LSSVM的回歸分析來(lái)預(yù)測(cè)導(dǎo)航相關(guān)信息。
支持向量機(jī)的基本思想是將數(shù)據(jù)通過(guò)非線性映射函數(shù)映射到高維特征空間,再對(duì)高維特征空間的數(shù)據(jù)進(jìn)行線性回歸,由此得到原特征空間數(shù)據(jù)的非線性回歸效果[12]。最小二乘支持向量機(jī)是將最小二乘法引入支持向量機(jī)中,將不等式問(wèn)題轉(zhuǎn)化為等式問(wèn)題[13]。假設(shè)有N個(gè)樣本{(xk,yk)|k=1,…,N}, LSSVM的回歸函數(shù)表達(dá)式為
y(x)=ωTφ(x)+μ
(16)
式中:ω為權(quán)向量;μ為偏差矩陣;φ(x)為非線性映射函數(shù);x為輸入數(shù)據(jù);y為相應(yīng)的目標(biāo)輸出數(shù)據(jù)。
對(duì)于輸入數(shù)據(jù)有
|y(x)-ωTφ(x)-μ|≤ek
(17)
則LSSVM的最優(yōu)化問(wèn)題即為
(18)
s.t.
yk=ωTφ(xk)+μ+ekk=1,…,N
式中:γ為正則化參數(shù);ek為誤差變量。
通過(guò)Language方法對(duì)上述優(yōu)化問(wèn)題進(jìn)行求解:
L(ω,μ,e,α)=J(ω,e)-
(19)
式中:αk為拉格朗日乘子。
對(duì)式(19)求偏導(dǎo)后的最優(yōu)條件為
由上述條件優(yōu)化問(wèn)題轉(zhuǎn)化為求解線性方程,即
(20)
y=[y1y2…yN]T
α=[α1α2…αN]T
K(xk,xl)=φ(xk)Tφ(xi)k,i=1,…,N
式中:k為函數(shù)運(yùn)算矩陣;Ω為函數(shù)運(yùn)數(shù)結(jié)果矩陣。
最終用于預(yù)測(cè)估計(jì)的LSSVM的函數(shù)表達(dá)式為
(21)
徑向基核函數(shù)(RBF)是較為常用的核函數(shù),其表達(dá)式為
K(x,xk)=exp(-‖xk-x‖2/σ2)
(22)
在使用RBF進(jìn)行LSSVM計(jì)算時(shí)僅需要確定σ和γ即可,本文中采用十折交叉檢驗(yàn)的方法對(duì)σ、γ兩個(gè)變量進(jìn)行選取和優(yōu)化。LSSVM采用最小二乘函數(shù)和等式約束將SVM中的不等式二次規(guī)劃問(wèn)題轉(zhuǎn)化為等式問(wèn)題,減少了算法的復(fù)雜性,提高了運(yùn)算效率。
2.2 基于LSSVM的GNSS/INS組合定位系統(tǒng)
當(dāng)GNSS信號(hào)完好時(shí),GNSS/INS系統(tǒng)能夠正常提供高精度的定位信息,GNSS與INS通過(guò)卡爾曼濾波進(jìn)行組合,能夠?qū)NS系統(tǒng)的誤差進(jìn)行及時(shí)校正并輸出導(dǎo)航信息。當(dāng)GNSS信號(hào)受到遮擋時(shí),GNSS不能對(duì)INS的信息進(jìn)行及時(shí)校正,導(dǎo)航系統(tǒng)的定位誤差會(huì)逐漸增大。為解決此問(wèn)題,本文提出LSSVM增強(qiáng)的受限環(huán)境列車定位精度保持方法,用于輔助INS的誤差校正。LSSVM輔助GNSS/INS的結(jié)構(gòu)框架見(jiàn)圖1。
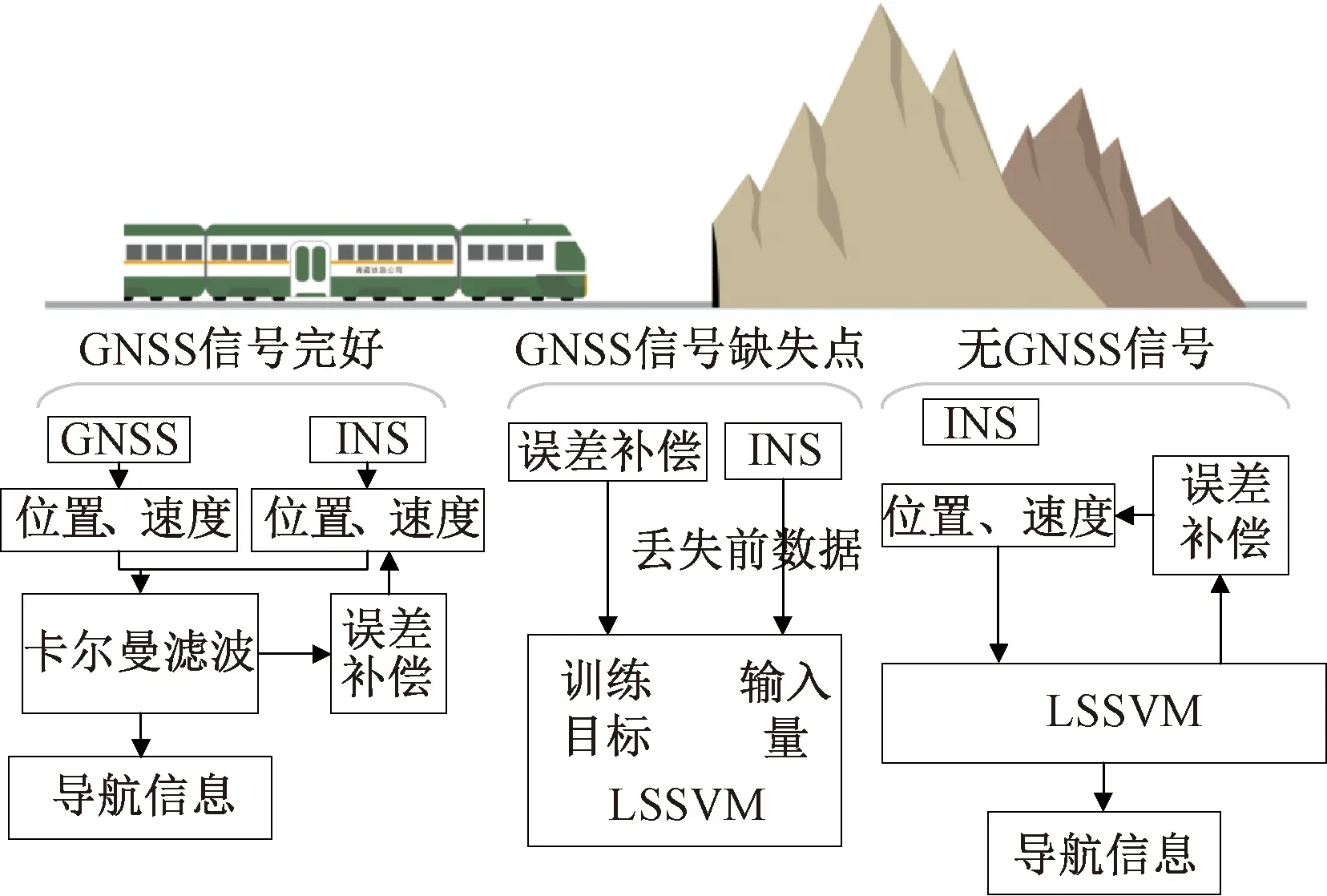
圖1 LSSVM輔助GNSS/INS的結(jié)構(gòu)框架
列車正常運(yùn)行過(guò)程中,在地面GNSS信號(hào)不受遮擋時(shí)采用GNSS/INS組合定位模式,GNSS信號(hào)完好時(shí)擁有很高的定位精度,INS的累積誤差可以由GNSS進(jìn)行校正,此時(shí)不需要利用LSSVM進(jìn)行INS的修正。該系統(tǒng)有兩種工作模式,模式的切換以GNSS的信號(hào)質(zhì)量作為判斷依據(jù),即在GNSS信號(hào)完好時(shí)使用正常的GNSS/INS松組合模式,在列車進(jìn)入隧道或GNSS信號(hào)受到遮擋時(shí)使用基于LSSVM輔助的導(dǎo)航模式。在GNSS信號(hào)缺失時(shí)INS不能被及時(shí)的校正,此時(shí)將信號(hào)缺失前一段INS計(jì)算的位置、速度、姿態(tài)等的增量信息作為L(zhǎng)SSVM的輸入,將卡爾曼濾波計(jì)算出的位置、速度、姿態(tài)等的校正信息作為L(zhǎng)SSVM的訓(xùn)練目標(biāo)進(jìn)行學(xué)習(xí)訓(xùn)練:
(23)
(24)

經(jīng)過(guò)數(shù)據(jù)的訓(xùn)練之后即可得到相關(guān)的LSSVM模型,此時(shí)利用訓(xùn)練好的模型再將INS導(dǎo)航信息的增量作為L(zhǎng)SSVM的輸入即可得到相應(yīng)的姿態(tài)誤差、位置誤差、速度誤差的輸出,通過(guò)LSSVM的輸出信息就可對(duì)INS進(jìn)行相應(yīng)的校正以及導(dǎo)航信息的輸出,代替了缺失的GNSS的作用,解決了無(wú)GNSS信號(hào)情況下INS無(wú)法進(jìn)行誤差校正的問(wèn)題。
3 實(shí)驗(yàn)設(shè)備及數(shù)據(jù)分析
3.1 實(shí)驗(yàn)設(shè)備及環(huán)境
為了驗(yàn)證本文提出的LSSVM輔助GNSS/INS的方案,在青藏鐵路線進(jìn)行了實(shí)驗(yàn)及數(shù)據(jù)采集。實(shí)驗(yàn)設(shè)備包括LDS定位單元和SPAN-FSAS定位單元,放置于列車內(nèi)部。
3.2 數(shù)據(jù)采集與時(shí)間同步
在進(jìn)行數(shù)據(jù)融合分析時(shí)需保證采集的數(shù)據(jù)時(shí)間同步,本實(shí)驗(yàn)所使用的數(shù)據(jù)采集傳感器均集成于一個(gè)系統(tǒng)當(dāng)中,算法的結(jié)果對(duì)比處理等均是通過(guò)后處理的方式呈現(xiàn)。LDS定位單元中包含有GNSS信號(hào)接收處理模塊和INS信號(hào)采集處理模塊。GNSS信號(hào)接收處理模塊可以通過(guò)接收衛(wèi)星信號(hào)實(shí)現(xiàn)位置、速度信息的解算,其數(shù)據(jù)采集的頻率是10 Hz。INS也可以提供實(shí)時(shí)的速度、加速度、位置等信息,其數(shù)據(jù)采集的頻率是125 Hz。兩種定位信息可在定位單元中進(jìn)行單獨(dú)存儲(chǔ)和信息的融合處理,并且數(shù)據(jù)均可進(jìn)行存儲(chǔ)與導(dǎo)出以便進(jìn)行更多的研究以及后處理工作。
由于GNSS與INS兩個(gè)子系統(tǒng)通過(guò)有線連接到同一個(gè)定位系統(tǒng)單元中進(jìn)行數(shù)據(jù)融合,信息傳輸?shù)倪^(guò)程不存在延遲,并且在進(jìn)行信息的采集過(guò)程中,數(shù)據(jù)由同一個(gè)系統(tǒng)打上時(shí)間戳信息,在數(shù)據(jù)融合時(shí)又通過(guò)嚴(yán)格的時(shí)間對(duì)齊進(jìn)行融合,所以不論是信息的傳輸或是融合都不存在延遲的問(wèn)題。信息傳輸與解算時(shí)間也遠(yuǎn)小于信息采集的時(shí)間間隔,可以滿足實(shí)時(shí)定位的需求。
3.3 實(shí)驗(yàn)結(jié)果
選取一段包括3個(gè)相距較近隧道的路段,在列車進(jìn)入隧道后,LDS定位單元中的GNSS信號(hào)中斷,此時(shí)導(dǎo)航信息僅由INS提供。隧道處僅慣導(dǎo)定位誤差結(jié)果見(jiàn)圖2。
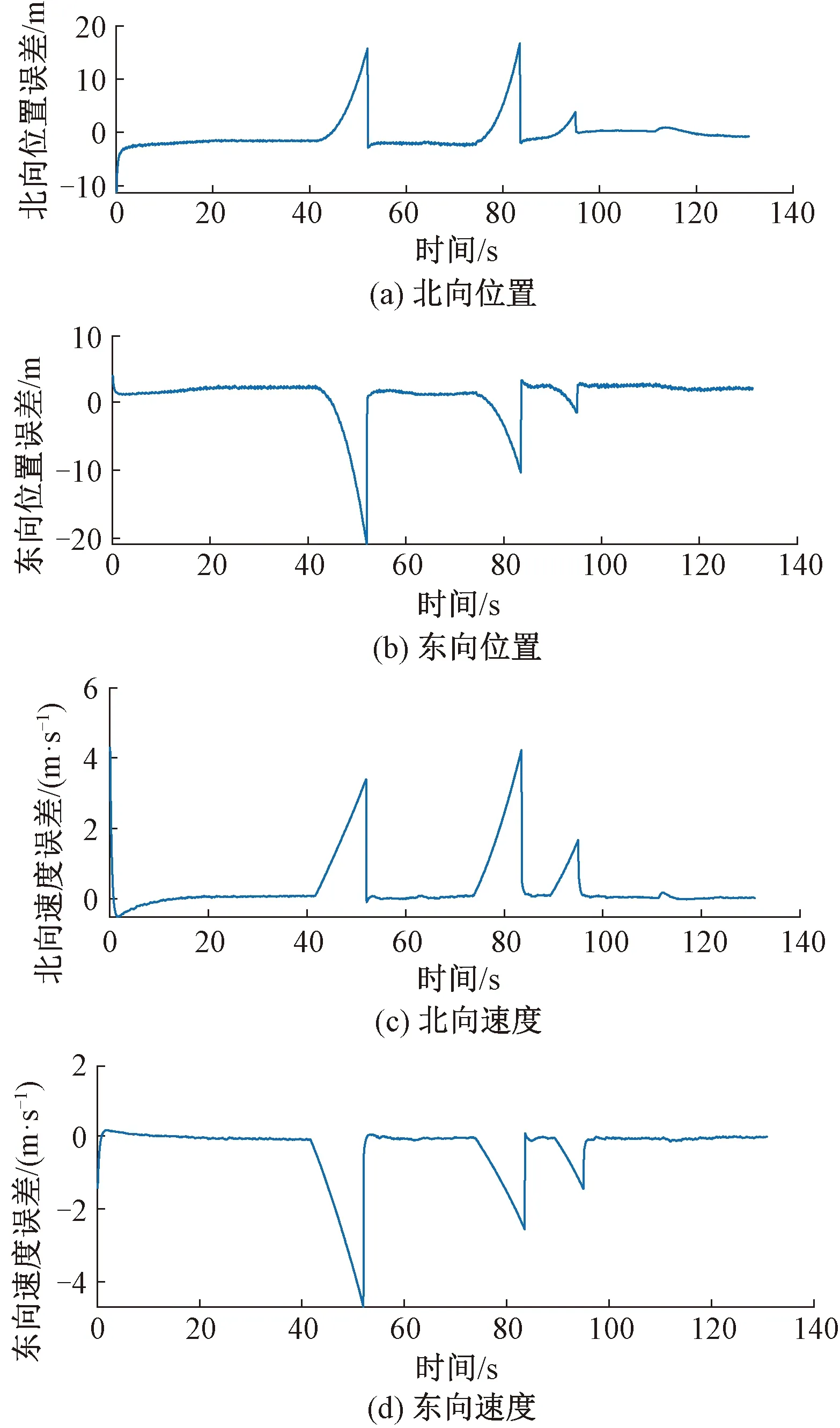
圖2 隧道處僅慣導(dǎo)定位誤差結(jié)果
由圖2可以看出,經(jīng)過(guò)3個(gè)隧道的時(shí)長(zhǎng)分別約為10、10、5 s。在GNSS信號(hào)缺失后INS單獨(dú)導(dǎo)航的誤差逐漸增大,緯度方向位置誤差最高達(dá)到16 m左右,經(jīng)度方向誤差最高達(dá)到21 m左右,RMS誤差最高可達(dá)約26 m。
采用本文提出的LSSVM增強(qiáng)的受限環(huán)境列車定位精度保持方法對(duì)隧道處INS進(jìn)行誤差校正后的導(dǎo)航結(jié)果見(jiàn)圖3。
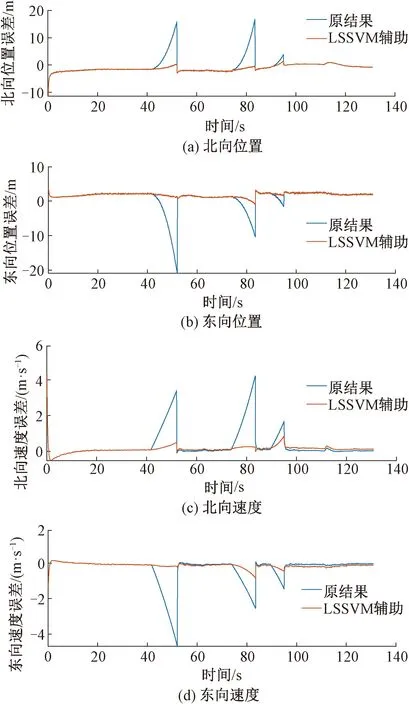
圖3 LSSVM輔助GNSS/INS導(dǎo)航結(jié)果
由圖3結(jié)果可以看出:采用LSSVM輔助GNSS/INS的方案能夠大大降低系統(tǒng)定位的誤差;從隧道處達(dá)到的最大誤差來(lái)看,北向位置誤差由16 m降至2 m以內(nèi),東向誤差由20 m降至2 m以內(nèi),北向速度誤差由4.2 m/s降至0.8 m/s以內(nèi),東向速度誤差由4.7 m/s降至0.7 m/s。具體的隧道處的誤差均值、STD、RMS、DRMS見(jiàn)表1。由表1可見(jiàn),本文提出的方法較大程度地提高了列車的定位精度。
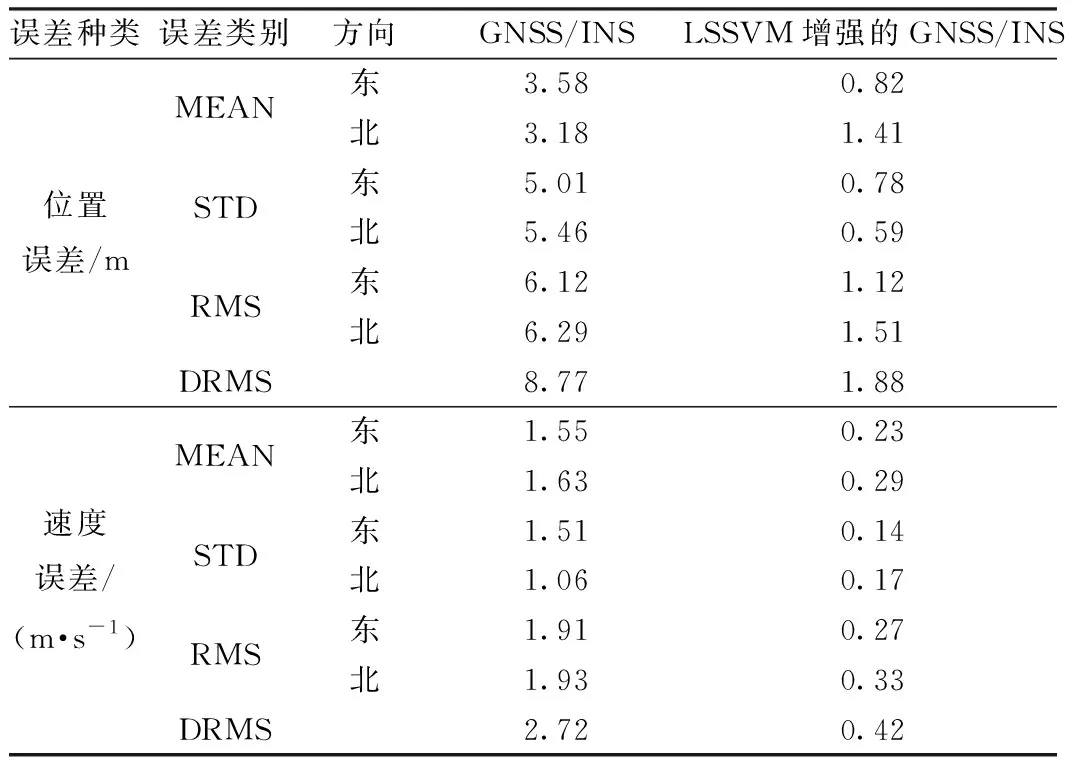
表1 誤差對(duì)比
采用LSSVM輔助GNSS/INS方法的列車運(yùn)行航跡圖以及未采用該方法的航跡圖對(duì)比見(jiàn)圖4。
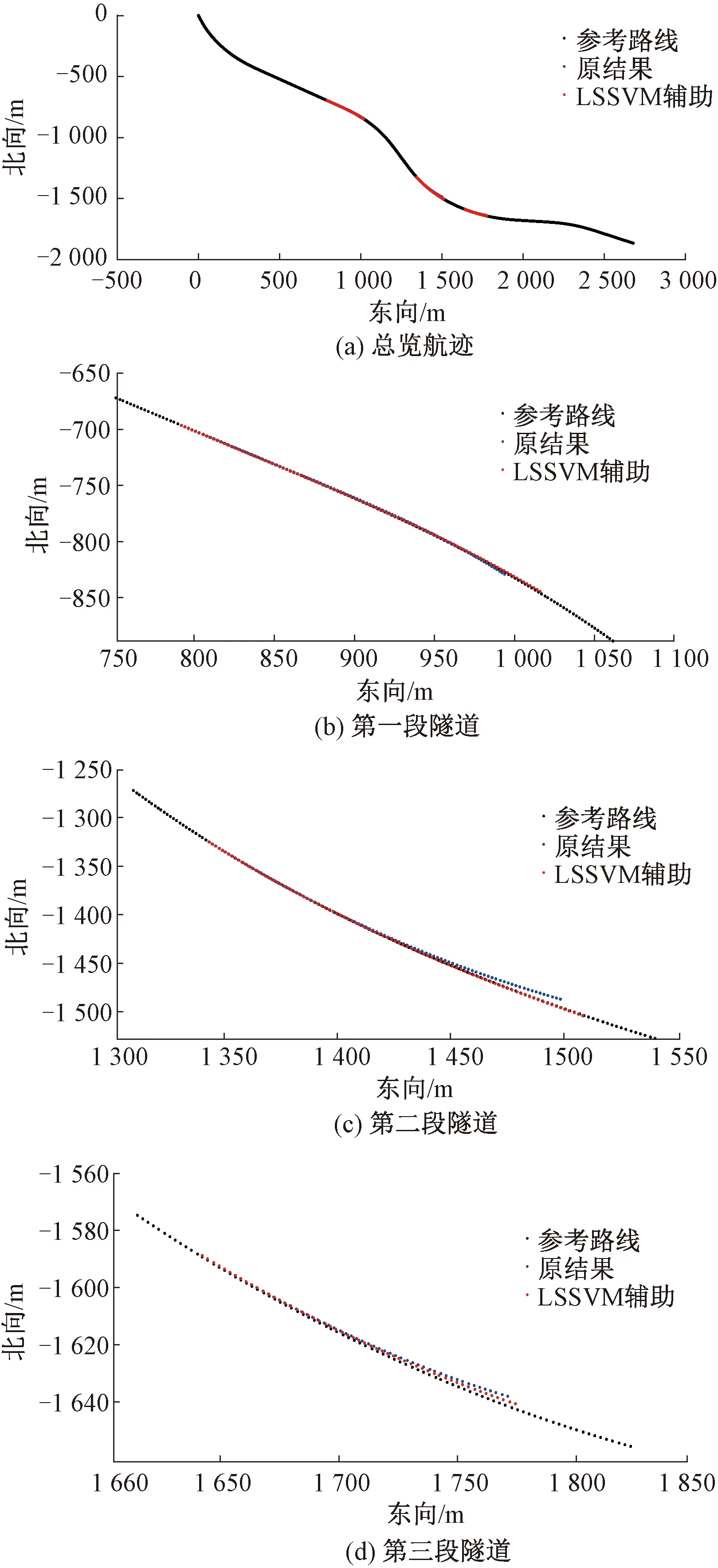
圖4 航跡圖
由圖4可以更加直觀地看出,在使用LSSVM輔助后列車運(yùn)行軌跡更加準(zhǔn)確,并且圖中包含的隧道也存在曲率較大的情況,本文所提出方法對(duì)于列車經(jīng)過(guò)彎道處的情況也有較好的表現(xiàn)。
4 結(jié)論
(1)針對(duì)列車經(jīng)過(guò)隧道、高山等特殊場(chǎng)景,GNSS信號(hào)中斷,GNSS/INS組合導(dǎo)航系統(tǒng)的輸出僅由INS提供時(shí)位置誤差會(huì)逐漸發(fā)散的問(wèn)題,提出了LSSVM增強(qiáng)的受限環(huán)境列車定位精度保持方法,利用GNSS信號(hào)中斷前的數(shù)據(jù)進(jìn)行LSSVM訓(xùn)練和學(xué)習(xí),用LSSVM對(duì)INS進(jìn)行誤差校正。通過(guò)在青藏線進(jìn)行實(shí)驗(yàn),驗(yàn)證了該方法能夠大大提高列車在隧道處的定位精度,具有一定的實(shí)際工程運(yùn)用價(jià)值。
(2)在列車正常行駛過(guò)程中,當(dāng)發(fā)生GNSS信號(hào)缺失時(shí),列車運(yùn)行前后時(shí)刻的速度、位置信息存在一種合理的線性趨勢(shì)外推的關(guān)系,這對(duì)于INS的誤差校正以及定位結(jié)果的精度保持有重要意義,本論文所提方法有良好的表現(xiàn)。
(3)在列車進(jìn)入長(zhǎng)大隧道后遇到列車事故迫停或意外停車等特殊情況時(shí),列車的定位方法有待進(jìn)一步擴(kuò)展。后續(xù)考慮采用加入里程計(jì)、電子軌道地圖等方法來(lái)進(jìn)一步完善列車的定位方法,加強(qiáng)定位系統(tǒng)的可靠性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中外會(huì)展(2014年4期)2014-11-27 07:46:46
環(huán)球時(shí)報(bào)(2010-02-11)2010-02-11 13:34:15
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32