多航態水下仿生機器人的設計
2022-03-29 05:54:18王彥斌沈榮天
科技創新與應用 2022年7期
關鍵詞:作業
王彥斌,李 燁,張 弛,沈榮天
(哈爾濱工程大學,黑龍江 哈爾濱 150001)
海上鉆井平臺和水下電纜等大型水下設備需要定期巡檢,損壞后如果不及時維修會造成難以估量的經濟損失和環境污染。目前水下設備的檢修大多依靠人工檢修或AUV和ROV聯合檢修,但是從AUV發現目標發出信號至母船接受信號并釋放ROV,這段時間目標很可能移動,但是ROV的運動范圍有限,無法繼續搜尋。所以目前人工檢修風險極高,AUV和ROV聯合檢修的成本高,效率低,并且存在操作復雜難以配合等不足。
因此市場亟需一種集巡航和定點作業能力于一體的水下機器人,本作品設計了一款集AUV巡航能力和ROV定點作業能力于一體的水下仿生機器人,解決巡航和定點作業無法快速配合的問題。
1 總體設計
首先根據結合AUV巡航功能和ROV定點作業功能的需求,確定機器人航爬雙模式的工作方式。我們清楚目前腿式機器人在陸地上運動性能的優越性,但是在水下速度并不能很出彩。軀干波動式在水下流體環境中速度不俗,但是在陸地上就差強人意。所以根據作品的工作場景的獨立性將在水中游動的最優選擇和崎嶇地形爬行的最優選擇相結合。
因此我們的作品將魚類的游動和昆蟲的爬行進行有機結合,既保證了游動的效率和機動性,又保證了在崎嶇地形的穩定性。然后根據識別目標、定點作業以及保持工作穩定的要求,為機器人增添控制系統、CPG算法以及目標識別功能。
2 機械設計
因為我們的作品要具備在水中航行和海底爬行的能力,所以我們自主設計了一種可以將航行和爬行模式有機結合切換的機械系統。首先在游動模式下,通過仿生機械魚尾擺動,利用魚體波推進方式游動。在接近定點作業的目標點時,多航態水下仿生機器人由游動模式轉換到爬行模式,側鰭收在軀體下方,機械腿從軀體內部展出,進行爬行。精確到達目標地點,能夠實現精確定位,具有低能耗、低噪音、高效率的優點。
3 硬件設計
機器人的硬件架構包括使命計算機和底層控制器。使命計算機采用NVIDIA Jetson TX2開發板,底層控制器采用STM32H7。
底層控制器主板上設有USB接口以接受上位機指令,同時配備有R485接口和舵機控制模塊進行舵機信號控制和舵機電流信號采集。
為了減小舵機大電流帶來的干擾,該作品將控制電路和大電流驅動電路進行隔離。舵機供電采用了單獨的供電電路,舵機供電電路主要為舵機提供大功率輸出,避免發生因供電功率不足而造成舵機燒毀的問題。此外,電源輸入端還加入防反接電路,對系統電路進行保護。同時,電路的模塊化分立設計有利于降低控制主板受到電磁信號的干擾。
4 軟件設計
4.1 六足控制
仿生機器人在爬行模式下可簡化為一個六足機器人,六足機器人的機構簡圖如圖1所示。

圖1 六足機器人機構簡圖
機器人的運動采用三足步態,即每3條腿作為1個運動組,同一運動組中的腿及其包含的關節的運動狀態相同。腿1、腿4和腿5為一組,腿2、腿3和腿6為一組。因此,機械腿上的18個關節也可以分為6組,關節2,4,6一組,關節3,5,7一組,關節9,13,17一組,關節8,12,16一組,關節11,15,19一組,關節10,14,18一組,每組關節的運動狀態相同。
用1表示關節正轉,-1表示關節反轉,0表示關節不轉。
可得到慢速三足步態的步態矩陣為
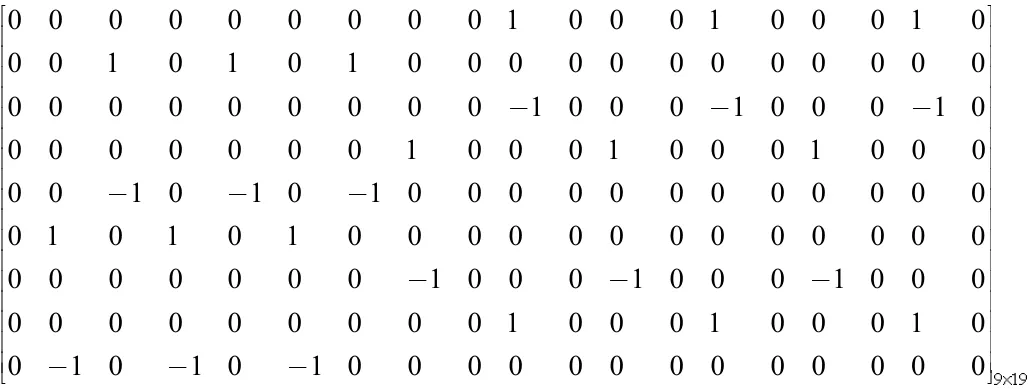
步態矩陣為9×19矩陣,ri行向量表示一個步態周期中第i步各關節的運動狀態,cj列向量表示第j個關節在一個步態周期中的運動狀態。(其中,第1列表示底板的固定關節,第1行表示起始時的準備步態,第2列到第9列表示循環步態。)
為了對仿生機器人的爬行模式進行仿真,將模型導入到ADAMS中,添加材料屬性、連接關系、驅動和接觸條件后,得到的仿真模型如圖2所示。為了方便觀察機器人的運動情況,添加了一個圓柱標志物作為參照物,機器人運動一步的過程如圖3所示。

圖2 六足機器人仿真模型

圖3 六足機器人的運動過程
機器人的運動情況如圖4所示,機器人的一個運動周期T=8 s可前進55 mm。

圖4 機器人的運動情況
六足仿生機器人的特點是具有豐富的步態并且能在復雜路面上高效行走,存在多種步態,可以適應不同步行速度和載荷的要求,冗余的肢體結構,使其在失去若干肢體的情況下仍能繼續執行一定的任務,提高了系統的可靠性[1]。
行為的步行控制結構,應用包容體系結構,對任務進行分層,各行為層以一種分等級(優先級)的方式并行運行,較高優先級的行為層可以對較低優先級的行為層的輸出進行修正/抑制,即所謂的包容[2]。
4.2 游動控制
借助仿真軟件ADAMS對尾巴及尾鰭機構進行運動學分析,將模型導入到ADAMS中并添加材料屬性、連接關系和驅動,如圖5所示。

圖5 尾巴及尾鰭機構仿真模型
仿真過程如圖6所示。

圖6 仿真過程圖
通過仿真得到各關節的轉角如圖7所示。

圖7 各轉角轉動的角度
通過仿真可知,尾巴及尾鰭擺動的周期為2 s,關節1轉動的角度為30°,關節2轉動的角度為20°,關節3轉動的角度為10°,與設計值吻合。
5 性能分析
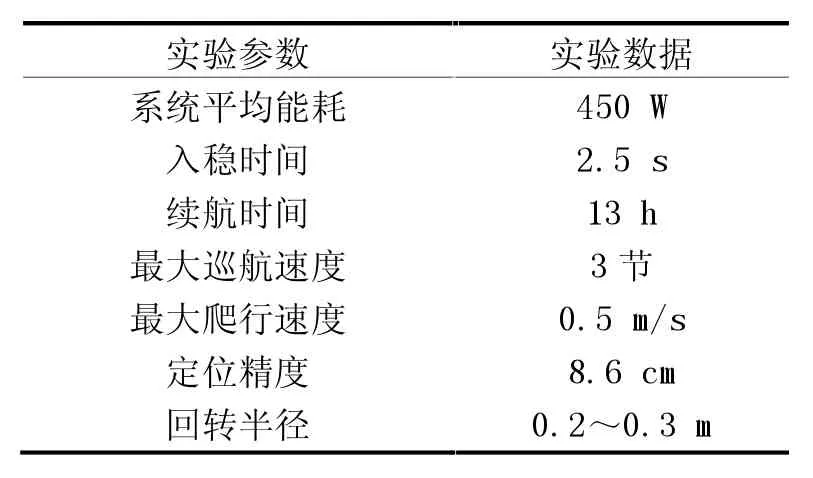
表1 性能分析
6 結束語
近幾年隨著國家海洋強國戰略的逐漸落實以及通過5G加速商業化所透露出的對信息技術行業的大力支持,透露出海洋信息設備行業的火爆。而我們團隊設計的多航態水下仿生機器人具有極強的續航性、自主性與功能可拓展性,能有效提高水下作業的效率。我們的作品可以應用于海底資源采樣、水下救援、水下電纜維修以及水產養殖等多種工作,能夠為國家的海洋建設提供有力支持,為建設海洋強國事業添磚加瓦[3]。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08