大型醫療設備中用于立體定位的一種擺動部件的創新設計應用研究
2022-03-29 21:49:29褚國榮
機電信息 2022年5期
關鍵詞:變形







摘要:提出了一種將放射治療和診斷治療相結合的醫療設備創新機構設計方法,通過絲杠結構與導軌結構呈一定角度布置,實現擺動機構沿圓弧運動。采用解析法對溜板機構進行運動學分析,保證溜板沿圓弧運動的勻速性和連貫性,同時保證與診斷機構的定位精度;建立擺動機構模型并對其進行靜力學分析和模態分析,得到擺動機構的變形分布情況和各階固有頻率及振型。結果表明,擺動機構具有較高的速度連貫性和足夠的強度來支撐放射治療和診斷治療相結合的醫療設備的運行,結構設計合理,滿足設計要求。
關鍵詞:大型醫療設備;擺動機構;模態分析;變形;振型
中圖分類號:R197.39? 文獻標志碼:A? 文章編號:1671-0797(2022)05-0022-04
DOI:10.19514/j.cnki.cn32-1628/tm.2022.05.006
引言
隨著人類社會的創新發展,社會生產水平的提高,人們對健康的需求越來越高,而在各類疾病中,腫瘤治療是一個世界性難題。當前人們常采用放射治療的方法進行腫瘤治療。但CT診斷的病灶位置與放射治療的目標靶點很難做到一致,即CT診斷出腫瘤后病人進行放射治療時,其位置將發生轉移,影響放射治療效果。國際上的大型醫療設備公司,如美國GE、德國西門子、荷蘭飛利浦等,都是將診斷設備和治療設備分開。為改變這一現狀,將16排CT圖像引導與6MeV放射治療系統結合在一起,設計了能夠實現精確定位的擺動機構,能將CT診斷出來的病灶位置反饋給放射治療設備,避免了病人改變位置后診斷出來的病灶無法準確定位的情況,從而解決了病灶位置和目標靶點無法一致的難題。
本文針對CT圖像引導立體定位6MeV放射治療設備研發,根據放療設備的結構特點,創新設計了一種用于該設備中定位和治療的溜板機構和弧形背板,根據放療設備的空間位置及運動范圍,根據擺動原理使放射機構以弧形方式在導軌上運行,從而配合診斷機構實現精準定位。
1? ? 放射源擺動機構設計原理
1.1? ? 空間運動
根據前述設計要求,設計出來的CT影像引導X射線全身放射外科治療系統的結構如圖1所示。其中,創新設計的擺動式導軌輸送放射源溜板機構如圖2所示,主要由弧軌背板、溜板驅動板、凸輪機構、放射源等裝置組成,具有輸送和放射診斷功能。溜板驅動板在弧軌背板的導軌上進行往復運動,其上的絲杠在溜板驅動板的驅動下帶動放射源與診斷機構配合。其運動關系簡圖如圖3所示。設溜板驅動板原點位于整體機構最左端,其運動軌跡為A1O1B1;當絲杠圍繞O1點擺動至與導軌角度為θ時,溜板驅動板運動軌跡變為A2O2B2,其中A1A2段為一段圓弧線。溜板機構上的絲杠處于同步帶輪張緊力和電機驅動力共同作用下,擺動插頭緊貼弧形導軌底側彎曲運行,由于擺動機構具有限位條件,則放射源在以圓弧線運行時可根據軌跡變化量的最大擺角來確定最大補償值[1]。
根據絲杠與溜板機構的幾何關系,當絲杠擺動到最大角度θ時,溜板機構上放射源機構運行軌跡長度與處于弧形背板中心處軌跡變化量相等[2]:
式中:R1為弧形背板圓弧導軌內側半徑;b為弧形背板導軌內側寬度。
1.2? ? 放射源擺動機構運動學分析
在應用過程中,溜板機構要保持勻速圓周運動,就需要導軌移動的速度能根據溜板的位置及時調整,如何保持其運動關系是需要重點研究的內容。利用溜板機構在軌道上的擺動帶動放射機構運行,其擺動角度范圍為±25°。電機為溜板機構提供動力,帶輪帶動絲杠沿弧形背板運行,擺動插頭將絲杠和溜板驅動板固定連接,同時溜板驅動板在圓弧導軌上運行。利用解析法對擺動機構進行運動學分析。BC為絲杠,定義為主動件,長度為L,則主動桿件以角速度ω1順時針旋轉;AC為從動件,由溜板背板C和固定點A相連接。溜板背板C中心與A之間的距離設為S,絲杠與溜板機構的角位移分別為λ1、λ2,固定點A與電機B中心點之間的距離為l。
為了研究擺動機構沿導軌運動的情況,將擺動機構和導軌的運動關系簡化,如圖4所示。
溜板機構上的擺動運動可視為一個曲柄滑塊機構,其上的機構構成矢量三角形,其矢量方程式為[3]:
擺動機構角位移:
C點的坐標:
投影到x軸和y軸的矢量方程:
由式(5)可得C點相對于A點的位移S和絲杠的角位移λ2:
通過對式(7)求導可得擺動機構內絲杠的角速度ω2表達式:
根據加速度公式α=■可得ω2的角加速度:
式(9)為擺動機構中AC的角加速度。
2? ? 放射源擺動機構有限元分析
2.1? ? 靜力學分析
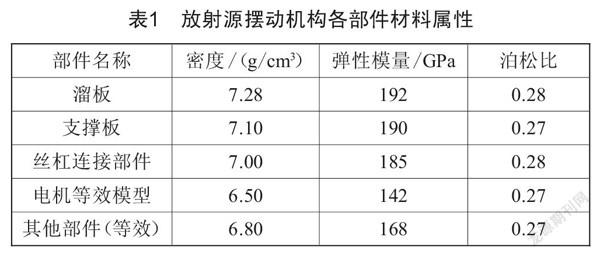
放射源擺動機構主要由弧軌背板、溜板機構、凸輪機構、放射源等裝置組成,而溜板機構作為主要的受力部位,為了獲知其力學性能,需要對其進行受力分析。擺動機構主要承受軸向進給力,同時弧軌背板上的導軌對于絲杠具有轉動約束,通過限位塊對擺動插頭位置運動進行限制;擺動插頭內安裝有轉向裝置,連接放射機構和絲杠沿著導軌運行。采用有限元方法分析溜板機構在最大載荷下的變形及應力分布情況;對溜板機構進行參數化建模,并將其導入到有限元軟件中進行受力分析[4],對其中的各個部件賦予相應的材料屬性,如表1所示。
對各部件進行網格劃分,并按照連接關系分別定義其接觸屬性,根據溜板所承受的載荷,在溜板上施加500 kg的載荷。對擺動插頭和弧形背板設置旋轉約束,絲杠受到放射機構的重力,同時對溜板的背板和弧形導軌等施加固定約束進行分析[5]。
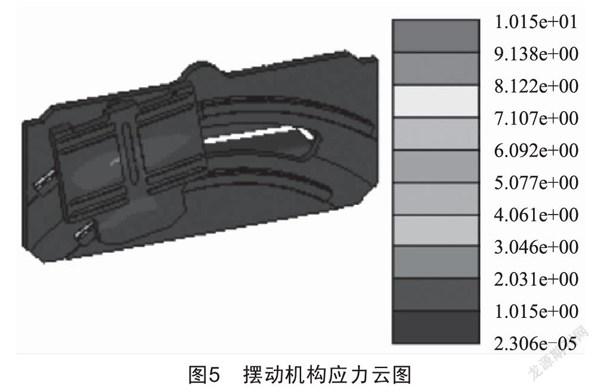
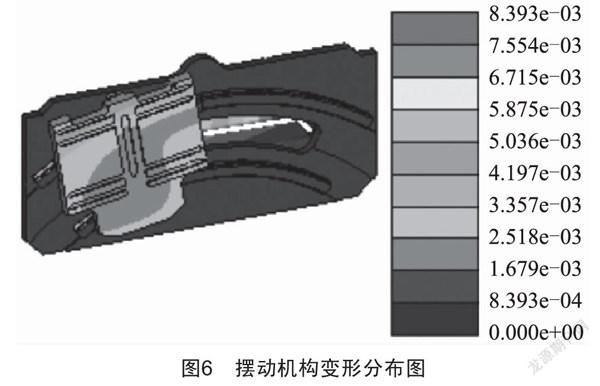
基于以上約束條件以及實際工況載荷,得出擺動機構的應力云圖和變形云圖,如圖5和圖6所示。
由圖5和圖6可知,擺動機構上的絲杠在受到最大扭矩和軸向進給力時,溜板機構最大應力為10.15 MPa,最大變形約0.008 393 mm。通過分析可知,擺動機構的最大變形遠低于材料的屈服強度,其變形小于設計要求。
2.2? ? 模態分析
2.2.1? ? 模態分析介紹
放射診斷機構通過溜板機構的帶動做弧形往復運動,對擺動結構進行模態分析,并研究其機械的動力特性。由以上設定可知擺動機構的材料屬性和結構質量,由模態分析確定擺動機構的固有頻率。自由振動的基本方程如下[6-9]:
式中:M為質量矩陣;C為阻尼矩陣;K為剛度矩陣;為加速度向量;為速度向量;X為位移向量;F為作用力向量;t為時間。
模型為無阻尼系統時的微分方程如下:
則假設微分方程的解為:
式中:A為振幅陣列;ω為角速度;φ為初相位。
通過對式(12)進行二次求導得到廣義加速度矩陣,再將其代入式(11)可得:
通過將式(13)進行線性方程式組求解,行列式有非零解的條件為系數值等于0,即:
2.2.2? ? 模態分析
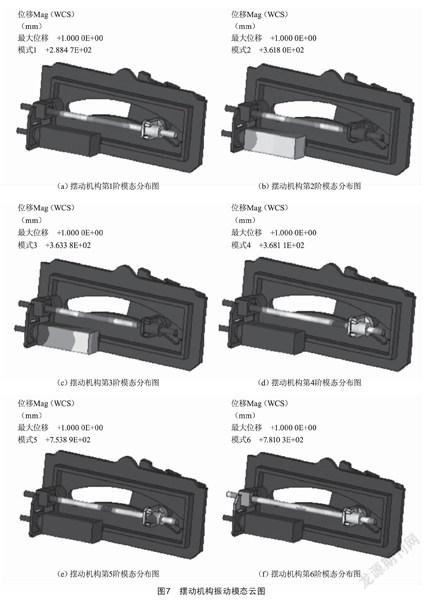
通過對擺動機構進行模態分析,為醫療器械中的結構設計和振動系統故障診斷及其優化設計提供重要依據。對擺動機構進行簡化,簡化部分螺紋孔和圓角等細微結構。所建模型輸出為stp格式,導入有限元軟件進行分析,對擺動機構無須添加載荷,僅添加約束即可。采用四面體網格劃分,計算前6階模態振型。其固有頻率如表2所示,模態分析結果如圖7所示。
3? ? 結語
綜上所述,基于擺動機構原理將放射治療機構和CT診斷機構兩者相結合,起到了精確定位的作用,避免了定位誤差對放射治療帶來的不利影響,提高了醫療器械診斷和治療腫瘤的效率及優越性。運用解析法求得擺動機構的運動學關系,并對其進行運動路徑分析,獲得了擺動機構運動位置與運動速度的關系,為提高擺動機構的定位精度提供了依據;通過對擺動機構進行有限元分析,得到溜板機構的最大應力為10.15 MPa,最大變形為0.008 393 mm;通過對溜板機構的模態分析,獲得其固有頻率和振動特性,其第1階固有頻率為288.47 Hz,遠高于機構的激振頻率,產生共振的可能性極小,后續頻率逐漸增大。本文所分析的內容對于醫療放射診斷治療系統整體的機械設計具有重要的參考價值。
[參考文獻]
[1] 南振江.擺動導桿式抽油機優化設計及其性能分析研究[D].西安:西安石油大學,2018.
[2] 王龍,崔建昆,劉兵,等.醫療輔助機械臂關節處的球鉸結構設計[J].農業裝備與車輛工程,2020,58(12):106-109.
[3] 田忠輝,王淑芬.基于位移矩陣的平面四桿機構運動綜合[J].大連大學學報,2010,31(6):57-60.
[4] 丁金燕,梁志祥,陳志威,等.弧線擺動式裝船機的運行機構探討[J].起重運輸機械,2020(24):57-59.
[5] 鐘自成,邵俊杰,李旺年,等.基于Python和ABAQUS的鉆機擺動機構拓撲優化設計[J].煤礦機械,2021,42(6):125-127.
[6] 付瑞玲,李文方.M型包裝袋掛面包裝機套袋裝置設計及模態分析[J].食品工業,2021,42(11):255-258.
[7] 羅堅,徐峰,陳妙芳,等.往復式凸輪夾鉗機構的研究與設計[J].科技與創新,2021(21):81-82.
[8] 鄧娟,喬禹寧,陳曉旭.采煤機破碎機構機械保護裝置改進設計[J].科學技術創新,2021(25):40-41.
[9] 王廣.大功率采煤機懸臂式破碎機的改進設計[J].煤礦機械,2019,40(12):122-123.
收稿日期:2021-12-23
作者簡介:褚國榮(1966—),男,江蘇南通人,高級工程師,研究方向:大型醫療設備的結構研發設計及功能開發。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
